
Abstract
We focus on the issue of ground-based cloud classification in wireless sensor networks (WSN) and propose a novel feature learning algorithm named discriminative salient local binary pattern (DSLBP) to tackle this issue. The proposed method is a two-layer model for learning discriminative patterns. The first layer is designed to learn the most salient and robust patterns from each class, and the second layer is used to obtain features with discriminative power and representation capability. Based on this strategy, discriminative patterns are obtained according to the characteristics of training cloud data from different sensor nodes, which can adapt variant cloud images. The experimental results show that the proposed algorithm achieves better results than other state-of-the-art cloud classification algorithms in WSN.
1. Introduction
Clouds have an important effect on the earth's energy balance and climate change due to interacting with solar and terrestrial radiation [1]. Therefore, cloud analysis has a guiding role in flight planning and aviation [2] and provides better warnings of future disasters, such as tornados [3]. Ground-based cloud classification, as an important cloud observation technique, has received more and more attention from research fields. It is because successful cloud classification can improve the precision of weather prediction and help to understand climatic conditions. Until now, clouds are still classified by human observers who have received professional training in meteorological station [4]. Despite their unquestionable usefulness, this method takes high cost of human resources and different observers may obtain discrepant classification results. Therefore, automatic ground-based cloud classification technique is urgently required in this field.
To address the cloud classification, a number of ground-based imaging devices have been developed for capturing cloud images, which provides hardware supporting for automatic cloud image classification. The cloud images can be obtained by the devices, such as the whole sky imager (WSI) [5–7], total sky imager (TSI) [8, 9], infrared cloud imager (ICI) [10], and all-sky imager (ASI) [11]. Traditionally, the cloud classification techniques handle cloud images captured from only one image sensor.
Meanwhile, wireless sensor networks (WSN) have gained worldwide attention in recent years, particularly with the development of smart sensors [12, 13]. WSN has important applications such as remote environmental monitoring and target tracking. When each image sensor serves as a sensor node, WSN can be employed to classify clouds. Cloud classification in WSN has two advantages over traditional cloud classification. First, each image sensor should allocate a computing device in traditional cloud classification, while all image sensors in WSN share one computing device in the task manager node which is able to reduce costs. Second, cloud classification in WSN can obtain more complete cloud observation data than traditional cloud classification due to deploying sensor nodes at different locations. However, cloud classification in WSN is a challenging task due to the extreme appearance variations under different atmospheric conditions. Furthermore, the sensor nodes in WSN are in the different locations, and therefore the cloud images captured from different sensor nodes are heterogeneous. Intuitively, if the trained classifier can adapt according to the training data, the above challenging will be overcome.
In this paper, we focus on the issue of cloud classification in WSN. A novel feature learning algorithm named discriminative salient local binary pattern (DSLBP) is proposed. Based on this strategy, discriminative patterns are obtained according to the characteristics of training cloud data from different sensor nodes, which can adapt variant cloud images. The proposed method is a two-layer model for learning discriminative patterns. In the first layer, the most salient and robust patterns are learnt from each class; then in the second layer, representation capability of features is maximized by forming a global set of discriminative patterns based on patterns obtained in the first layer. The experimental results show that the proposed algorithm achieves better results than state-of-the-art cloud classification algorithms in different cloud image databases.
The remainder of this paper is organized as follows. Section 2 details the proposed algorithm. Section 3 presents the experimental results which show the super performance of our algorithm. Finally, we conclude the paper in Section 4.
1.1. Related Work
To the best of our knowledge, our work is the first to study cloud classification in WSN, and therefore we only introduce the traditional cloud classification algorithms. Over the past few years, a number of methods have been proposed for ground-based cloud classification. Existing cloud classification techniques are generally based on the characteristics of structure and texture in cloud images, which are inspired by image or video classification [14]. The algorithms based on structure features include cloud fraction and edge sharpness [15] and Fourier transformation [16], while the algorithms based on texture features include Law's measures [17] and cooccurrence and autocorrelation matrices [18]. In addition, several algorithms [4, 7] are proposed to fuse these two characteristics as the final representation. Although these above works have been done on this topic, they can not effectively explore useful information of cloud images. It is because cloud images, as one kind of nature texture, usually possess very large intraclass variations due to the large variation on illumination, climate, and deformation [19]. Therefore, it demands a more powerful algorithm to extract discriminative information of cloud images.
Fortunately, local binary pattern (LBP) and its extension have been proposed as effective feature extraction methods for texture and image classification [20, 21]. The properties of LBP are rotation invariance, low time complexity, and robustness against monotonic illumination change. The predefinition “uniform” patterns of LBP (the uniform LBP for short) effectively improve the performance of classification. The basic assumption is that the uniform LBP patterns occupy the salient proportion among all patterns (approximately 80%) and they are sufficient to reflect textural structures. However, uniform LBP patterns are not the salient patterns in two cases. The one is that the cloud images captured from different sensor nodes are heterogeneous, while the uniform LBP patterns are constant. The other one is that the ground-based cloud images are with irregular edges and shapes. Figure 1(a) illustrates that the proportions of uniform LBP patterns occupy all rotation invariant patterns in a randomly selected sample of 50 ground-based cloud images from different sensor nodes. From Figure 1(a), we can observe that the uniform LBP patterns do not account for a high proportion of the patterns in cloud images; therefore they can not capture the fundamental properties of these images. Although Liao et al. [22] proposed dominant LBP (DLBP) as an improved strategy to solve this problem, the method based on DLBP only considered the pattern occurrences of salient patterns, while the type of pattern information is lost. To address this limitation, we propose an adaptive feature learning algorithm named discriminative salient local binary pattern (DSLBP) for ground-based cloud image classification in WSN. The proposed algorithm can obtain discriminative features based on the characteristics of cloud database from different sensor nodes, as a result of improving the performance.

(a) The proportions of uniform LBP patterns occupy all rotation invariant patterns in ground-based cloud images; (b) the proportions of salient patterns occupy all rotation invariant ones in the same ground-based cloud images as (a).
2. The Proposed Algorithm
In this section, we first briefly review LBP and then describe the proposed DSLBP algorithm.
2.1. Review LBP
The LBP is a gray-scale texture operator that describes the spatial structure of the local image texture. The LBP operator labels each pixel in the image by computing the sign of the difference between the values of that pixel and its neighboring pixels. The result is a decimal number computed by the obtained binary string. Then the image can be represented by the histogram of these decimal numbers. The LBP value for the central pixel is computed as

Let N denote the total number of rotation invariant LBP patterns. According to the definition in (1), the value of N is determined by neighboring samples P. For example, when


2.2. Discriminative Salient LBP
The uniform patterns in LBP, which indicate the structural information with straight or low curvature edges, are the fundamental properties of local image texture. The basic assumption is that the uniform LBP patterns occupy the salient proportion among all patterns (approximately 80%) and they are sufficient to reflect textural structures. However, when applying LBP algorithm for ground-based cloud classification in WSN, there are two disadvantages reducing the performance of classification. First, ground-based cloud images, as a kind of natural texture, often contain several complicated structures, such as curvature edges, crossing boundaries, and corners. Extraction of the uniform patterns from cloud images may result in imprecise representation because the uniform LBP patterns are not the fundamental properties of texture in cloud images. Second, the cloud databases from different sensor nodes in WSN are heterogeneous due to different parameters of the sensor nodes. If we utilize the same predefined patterns to extract features without considering the characteristics of sensor nodes in WSN, the performance will decline sharply owing to lack of generalization.
To overcome the above drawbacks, we propose an adaptive feature learning algorithm named discriminative salient local binary pattern (DSLBP) for ground-based cloud image classification. Based on this strategy, discriminative patterns are obtained according to the characteristics of training cloud data from different sensor nodes, which can adapt variant cloud images. The proposed method is a two-layer model for learning discriminative patterns. In the first layer, the most salient and robust patterns are learnt from each class; then in the second layer, representation capability of features is maximized by forming a global set of discriminative patterns based on patterns obtained in the first layer. In this section, we introduce the two layers in detail.
2.2.1. The First Layer
The robustness of features generally includes rotation invariant, resistance to noise, and illumination changes, while the robustness to noise is associated with pattern occurrences of cloud images. In other words, if a pattern rarely occurs in a cloud image, it is probably sensitive to noise. To ensure the robustness of feature representation, the most salient and robust patterns from each class are learnt in the first layer. First, we build rotation invariant LBP histogram by (1) for every cloud image from each class and then accumulate all of these histograms into a single histogram. Finally, we sort the histogram in descending order. The first several patterns in this sorted histogram are the most frequently occurring patterns in this class of cloud images which are as the salient patterns. The minimum value k of determining the salient patterns is calculated by

Step 1. Select an image Step 2. Initialize the pattern histogram Step 3. Compute the pattern label for each center pixel Step 4. Increase the count in the corresponding bin by 1, that is, Step 5. Accumulate the histograms from all M training samples into a single histogram; Step 6. Sort the single histogram by counts in descending order, denote it as Step 7. Calculate the number k of salient patterns by (4) Step 8. The patterns corresponding to Step 9. Return
2.2.2. The Second Layer
In the first layer, we obtain robust features for each class. This layer is designed to strengthen the ability of feature description from different class, which can achieve discriminative representation. The pattern set

In summary, the whole procedure of the proposed learning model can be summarized in Figure 2. Compared to uniform LBP used in WSN, several advantages of our proposed DSLBP algorithm can be concluded.
The DSLBP extracts salient patterns based on the characteristics of cloud images by using statistical analysis. This kind of strategy can effectively overcome the interference of the noise. The LBP utilizes predefined uniform patterns for all databases without considering the differences among cloud images captured from sensor nodes in WSN, which lacks generalization. Instead, the DSLBP learns discriminative patterns based on the characteristics of cloud images captured from different sensor nodes. As a result, improved performances are achieved. The LBP predefined uniform patterns as the feature representation from all training images without considering interclass information, and therefore uniform LBP lacks the discriminative power and representation capability, while the proposed DSLBP algorithm takes the union of all salient pattern sets to cover the information of all classes, where the discriminative power and representation capability are well considered.
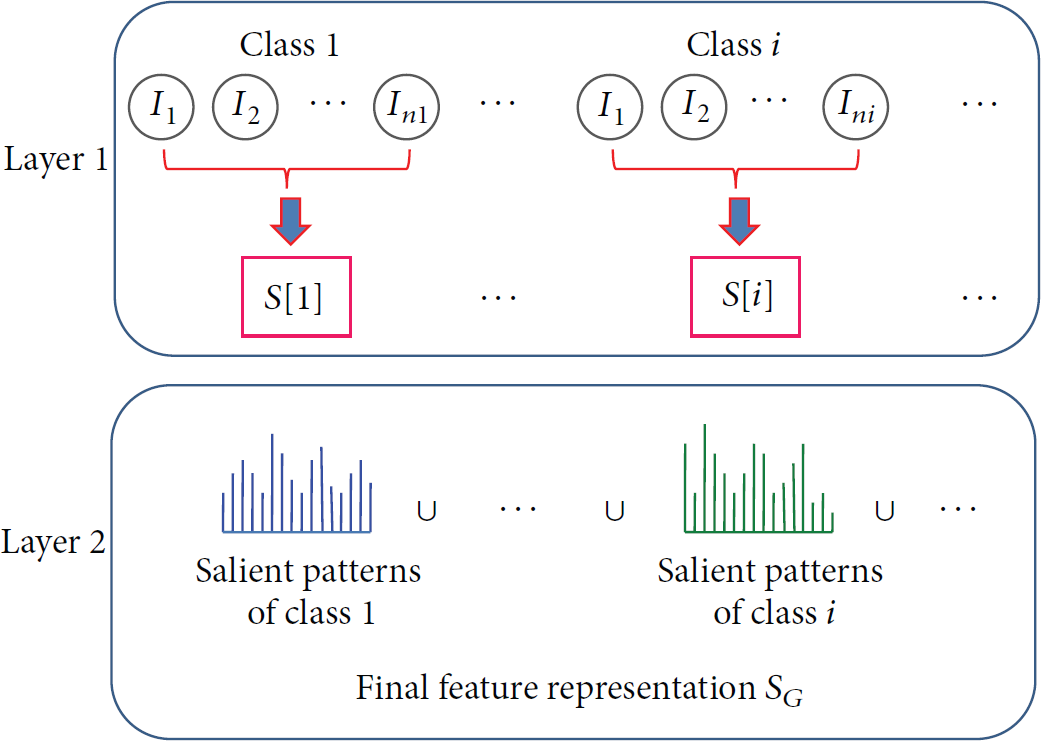
A visualized picture of the proposed DSLBP model.
3. Experimental Results
3.1. Databases
To evaluate the effectiveness of our algorithm, we carry out a series of experiments on the Kiel database and IapCAS database, which are from different sensor nodes in WSN.
3.1.1. Kiel Database
The Kiel database derives from a sensor node in WSN. The core equipment of this node is a digital camera equipped with a fisheye lens, which provides a field of view larger than

The cloud samples from (a) the Kiel database and (b) the IapCAS database.
3.1.2. IapCAS Database
The second database is the IapCAS database, which derives from another sensor node in WSN. The images in the IapCAS database are more challenging. The sample number of each class is also different and the total number is 860. Figure 3(b) shows the samples from each class.
3.2. Methods in Comparison Study
The experimental goal is to compare the proposed DSLBP algorithm with four current state-of-the-art methods, which are identified as follows.
The fusion of texture and structure (FUS1) [7]: Heinle et al. [7] extract spectral and simple textural features as the final representation. The fusion of texture and structure (FUS2) [4]: Zhuo et al. [4] extract textural and structural features as the final representation for each cloud image. Local binary pattern (LBP) [20]: LBP has been introduced in Section 2.1, where the uniform patterns are considered. Dominant LBP (DLBP) [22]: Liao et al. [22] proposed DLBP as an improved strategy to solve the problem in uniform LBP [20], where the pattern occurrences of salient patterns are considered.
3.3. The Experimental Setup and Result Analysis
For the fair comparison, we use the same experimental setup for all the experiments. First, each cloud image is converted to gray scale and normalized to have zero mean and unit standard deviation. Then each extracted patch feature is normalized via Weber's law [24]. Finally,
The experimental results of different algorithms on the Kiel and IapCAS databases are listed in Table 1. Meanwhile, we also utilize the confusion matrices to show the detailed performance of each class using the proposed DSLBP method for the two databases, which are shown in Figures 4 and 5.
The comparison of our method with the state-of-the-art methods on the Kiel database and IapCAS database.

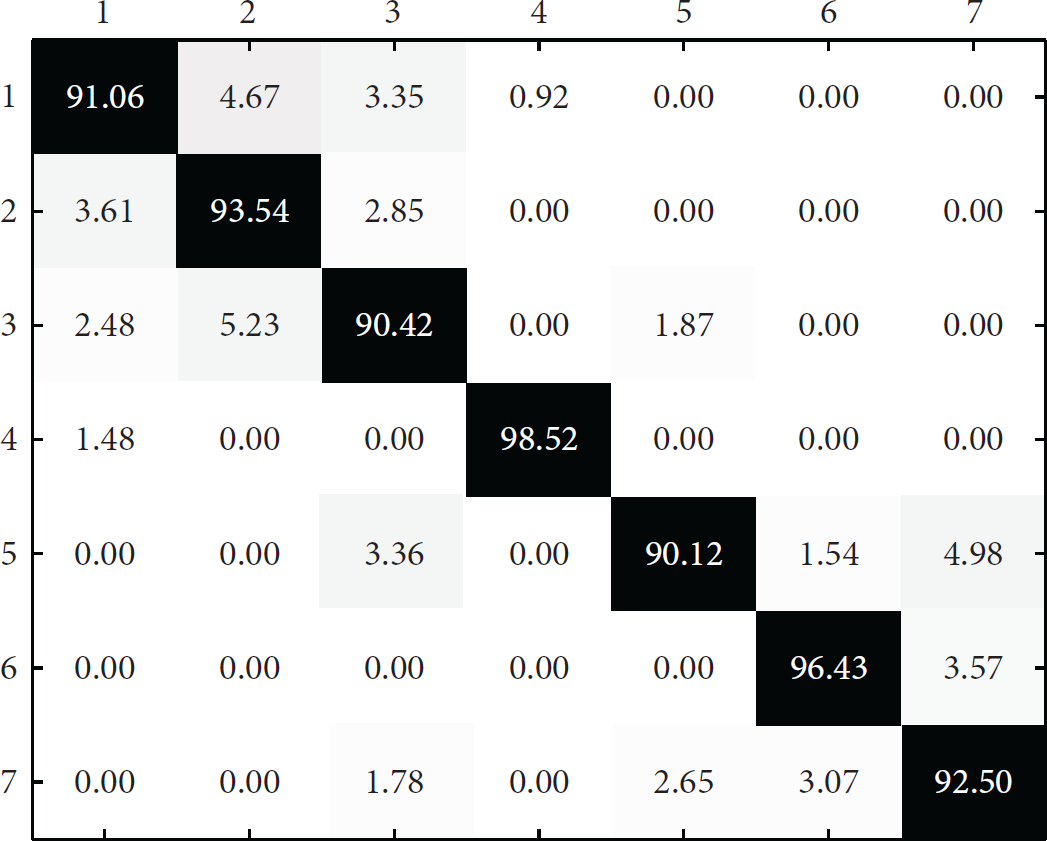
Confusion table of our method on the Kiel database (%). The element of row i, column j in confusion table means the percentage of the ith class being recognized as the jth class.

Confusion table of our method on the IapCAS database (%).
From the results, several conclusions can be drawn. First, the proposed DSLBP algorithm achieves the highest classification accuracies in the two databases. Second, the performance of our DSLBP method is over 6% better than that of LBP method in the Kiel database and over 8% in the IapCAS database. It is because our DSLBP learns the discriminative salient patterns. Third, the classification results of DSLBP are better than that of DLBP, indicating that only pattern occurrences of salient patterns are considered by DLBP failing to fully characterize useful information.
The above two databases derive from different sensor nodes in WSN, and therefore the cloud images in WSN are captured with various hardware settings, under varying illumination and noise conditions, and postprocessed with different image techniques. The proposed DSLBP learns the discriminative patterns from training samples, which can adapt different sensor nodes in WSN.
4. Conclusions
In this paper, a novel feature learning algorithm named discriminative salient local binary pattern (DSLBP) is proposed for ground-based cloud classification in WSN. The proposed method is a two-layer model for learning discriminative patterns based on local binary pattern (LBP). The first layer is designed to learn the most salient and robust patterns from each class, and the second layer is used to obtain features with discriminative power and representation capability. Based on this strategy, discriminative patterns are obtained according to the characteristics of training cloud data from different sensor nodes, which can adapt variant cloud images. The experimental results show that our method achieves better results than other state-of-the-art cloud classification algorithms in WSN.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by the National Natural Science Foundation of China under Grant no. 61401309 and the Doctoral Fund of Tianjin Normal University under Grant no. 52XB1405 and no. 5RL134.