
Abstract
Cyber physical systems collect plenty of information from physical world. This information must be transmitted to the base station immediately to support the making of controlling orders since the physical world keeps transforming rapidly. Such a fact needs the support of real-time transmitting in CPS. Real-time traffic often has some extra QoS requirements. For example, regulating the interservice time, which is the time between two consecutive transmissions of a link, is essential for the real-time traffic in wireless networks. A guarantee of the interservice time of a single user is a precondition to support the normal operating of a system. As far as we know, none of previous work can guarantee the performance on the interservice time. Motivated by this, we design a framework for interservice time guaranteed scheduling. We first define a new capacity region of networks with a strict interservice time guarantee. It is an extension of the well-accepted definition on basic capacity region. Then we propose a novel scheduling policy that is both throughput-optimal and interservice time guaranteed. Simulation results show the policy performs well in interservice time and throughput.
1. Introduction
As mobile devices and wireless communication technology keep improving in recent years, there have been more and more complicated wireless networks based applications like cyber physical systems, mobile social networks, and so forth. Real-time traffic occurs frequently in these applications. For example, in a cyber physical system, the sensors collect huge size of information from physical world. And the data is sent to the base station for further decision making [1]. Due to the quick evolving of physical world [2, 3], the CPS must ensure a rapid response to events in the physical world. Then a basic condition of CPS systems is that packets must be delivered to the base or cluster head before their bringing ground truth [4, 5] goes out of date. Such a condition will lead to a great many real-time transmissions in wireless network. Meanwhile, real-time traffic often has some quality-of-service requirements besides the basic need of throughput optimizing and bandwidth saving [6, 7]. These QoS requirements mainly include regularity of the interservice times, packet delay constraints, and packet delivery ratio. As we know, such requirements fail to be captured by those works that only focus on the optimality of throughput performance when scheduling [8] or routing [9, 10]. Some efforts have been made to improve different aspects of QoS. For example, many scheduling policies [11–16] are proposed to handle the transmitting of packets with deadlines. These policies differ in their definitions of delay constraints. And the performance of packet delivery ratio is considered in [17].
Interservice time is the time between two consecutive services for a user, and regularizing the interservice time means a user can get a second chance to transmit in less than a bounded period of time since its last transmission. The regularity of the interservice time is a precondition to support real-time applications like multimedia streaming [18] and also an index to assess the performance of real-time traffic. It is also very important for data collection in CPS systems, since each node must periodically upload its data to the sink, to make sure the sink can capture the event in the corresponding area. However, only very few works study the regularity of the interservice times [18, 19]. Li et al. design a new scheduling policy [18] that keeps the stability of the system under an arriving rate vector while ensuring the regularity of interservice time for each user. The policy is mainly designed to achieve provable performance on the mean value of interservice time. However, to guarantee the interservice time of a single user is also essential. A user may grow into impatience with large interservice time, besides the risk in the nonsupport of its real-time traffic. Some problems remain open when the system has a strict constraint on the length of interservice time for every user.
What is the set of arriving rate vectors under which the system is stable and each user keeps a guarantee of the interservice time (i.e., the interservice time of any user is less than a threshold)? Is there a scheduling policy that supports such set of arriving rate vectors while meeting the requirement on service regularity?
In this work, we focus on designing a scheduling policy that keeps the wireless network stable while providing a guarantee of the regularity of interservice time for each user. The contributions of this paper are summarized as follows.
We formulate the problem of handling interservice time constraint in wireless network and define the service-regularity guaranteed capacity region of the system with a given interservice time constraint. We propose a novel scheduling policy in which the interservice time of any user is exactly below the required upper bound given by the constraint. We derive the set of arriving rate vectors inside the service-regularity guaranteed capacity region and prove that the proposed scheduling policy is throughput-optimal, which means it can support all the arriving rate vectors in the capacity region. Simulation results indicate that our scheduling policy can meet the interservice time constraint and performs well on the stability of networks.
The rest of the paper is organized as follows. In Section 2, we bring a literature of the review on the development of scheduling policies in wireless network. In Section 3, we introduce the network model used by our work. In Section 4, the novel scheduling policy is proposed. In Section 5, we prove some properties of the scheduling policy. In Section 6, we show and analyse the simulation results of our scheduling policy. And Section 7 concludes the paper.
2. Related Work
Job scheduling is extensively studied in the real-time operating system [20]. However, link scheduling in wireless network is different from the job scheduling. For example, the length of standard packet is often fixed in a wireless network, which means a link with few data may waste the bandwidth. In the operation system, a proper quantum length can be selected to minimize the waste. There are also many differences in the model assumptions. Thus the conclusions for the operating systems can not be directly used for wireless networks.
Link scheduling is a fundamental challenge in the design of wireless networks. It is well-known that the max weight scheduling policy is throughput-optimal [8]. However, the problem of finding the disjoint set of links with max weight is NP-hard. Hence, a max weight scheduling policy incurs high overhead. There have been many efforts to design low complexity scheduling policies with throughput performance guarantees. Some policies are based on the picking-and-comparing method [21] or carrier sensing multiple access (CSMA) [22]. Those policies gradually achieve the optimal throughput after many iterations but are insensitive to the channel fading [23]. Other policies focus on finding a maximal weight independent set (MWIS) of links. Sakai et al. [24] and Wan et al. [25] designed centralized policies that could find a MWIS with provable ratio bounds. Basagni [26], Hoepman [27], and Joo et al. [28] separately propose distributed scheduling policies for different network models. However, none of these works deal with the QoS requirements of users.
Some scheduling policies are designed to meet the packet delay constraint for each user [11, 12, 14–16]. They all partition the time into frames, and packets will run out of time before the end of their arriving frames. They are different in the assumption of the traffic. Some of them assume the traffic arrives at the beginning of the frame [11, 12], while others assume the arriving happens any time in the frame [14–16]. They also differ in the introducing of channel fading [13], nonidentical delays [16], and so forth. Kang et al. [17] propose a new policy that accommodates packet delivery ratio.
For all we know, very few works [18, 19] deal with the performance of interservice time. Li et al. [18] use a new type of weight to capture the interservice time performance. The weight is a combination of queue length and time-since-last-service. Then under the max weight scheduling policy, a user will get a second service with a growing probability as the time-since-last-service increases. And the interservice time can be regulated. Li et al. [19] extend his work to consider the interservice time performance of rate vectors close to the edge of capacity region. Li et al.'s works fail in the situation when the interservice time of each user is strictly bounded and one hopes to know the exact set of arriving rate vectors that can meet the boundary.
3. Network Model
In our network, N users hope to transmit to a common destination via the same channel. Time is partitioned into slot, and in each slot only one user can communicate with the destination because of the destructive interference in wireless communication. In each slot,
We use boolean variable


Now we formalize the stability of networks by the following definitions.
Definition 1.
We say that the network is stable under an arriving rate vector if the underlying Markov chain

An arriving rate vector
Definition 2.
A scheduling policy is throughput-optimal for a network if
Interservice time is the number of slots between two consecutive transmissions of a user. We use
In this paper, we focus on the network model with an extra constraint that
Definition 3.
We say that the network is ϵ-stable under a rate vector λ if the network is stable and
The definitions of ϵ-supported and ϵ-capacity region
Definition 4.
A scheduling policy is ϵ-throughput-optimal for a network if
Our objection is to design a scheduling policy that is ϵ-throughput-optimal for our network model.
4. Service-Guaranteed Maximum Weight Scheduling Policy
In this section, we propose our scheduling policy (see Algorithm 1). The novel scheduling policy is a maximum weight type policy, while guaranteeing an upper bound on the average interservice time of all users. We call this policy service-guaranteed maximum weight scheduling (SGMW for short).
Service-Guaranteed Maximum Weight Policy: scheduled in ith slot set all go to next interval; scheduled in current interval set schedule the user j with maximum set schedule the user j with maximum
Algorithm 1
SGMW partitions time into equal sized intervals. Each interval contains
In each interval, the scheduling policy is composed of two components: loose phase and tight phase. The policy first starts in loose phase at the beginning of each interval. In loose phase, all users compete for the channel, and our policy is the same as maximum weight scheduling. SGMW goes into tight phase when the number of time slots left in an interval is the same as the number of users that have not been scheduled in this interval. In tight phase, the policy repeatedly chooses the user whose weight is the largest among the set of users never scheduled in current interval. Obviously, the tight phase lasts until the end of the interval. An interval will terminate before
The weight of user i at time slot t is calculated by the following equation:

Our scheduling policy is a maximum weight type policy and here is an instance about how it processes.
Example 5.
There are two users in the network, with
In slot 1, the SGMW is in loose phase.
In slot 2, the SGMW is still in loose phase because there are 2 slots left and only user 2 has not been scheduled.
In slot 3, the SGMW turns to the tight phase.
In slot 4, a new interval begins, and the process repeats itself. Figure 1 shows the evolution of the network in an interval.

An instance of SGMW.
The time complexity of the policy is analyzed as follows. In each slot, the policy needs to check the weight of each user and selects the largest one. This requires linear scanning of all users, and the time complexity is
5. Properties of SGMW
In Section 5.1, we prove that SGMW is ϵ-throughput-optimal. We first put forward a necessary condition for a rate vector to be ϵ-supportable. Then we prove that SGMW can support all rate vectors following the necessary condition. SGMW can also bound the average interservice time for each user; thus, it is ϵ-throughput-optimal. In Section 5.2, we derive the ratio between ϵ-capacity region and the original capacity region. The interservice time guarantee of a given rate vector is discussed at the end of this section.
5.1. ϵ-Throughput-Optimality
We first give the necessary condition for a rate vector to be ϵ-supportable.
Lemma 6.
For any arriving rate vector
Proof.
We prove the lemma by contradiction. Assume
The number of slots in which user i transmits during a total of T slots is no less than

There are in total

According to the constraint that

Then the network is instable under
Lemma 7 proves that SGMW can support (may not be ϵ-supportable) all the rate vectors following the condition in Lemma 6.
Lemma 7.
For any arriving rate vector
Proof.
Each interval can be partitioned into two parts: round robin stage and max weight stage. The round robin stage is composed of N slots, one for each user. The max weight stage includes ϵ slots, and the user with the largest weight in each of these slots is scheduled. Slots of two stages may appear crosswise with each other. A slot belongs to the round robin stage if it is the only slot that the user transmits in current interval. And if a user transmits multitimes, arbitrary one of them belongs to the round robin stage.
Then we are about to prove the system is stable in both of the two stages. For any user i,

The first part of the right side of the equation is supportable in the round robin stage since it is no larger than
The second part of the right side is supported by the max weight stage, which can be deduced as follows:
The network is stable in its max weight stage when
Then the whole rate vector is supportable under our interval-based scheduling policy SGMW.
Lemma 8 is to prove that SGMW can also keep a bound on the interservice time for all users.
Lemma 8.
If an arriving rate vector
Proof Sketch. Time slots are partitioned into intervals in SGMW, and length of each interval is less than
SGMW is then ϵ-throughput-optimal by combining Lemmas 7 and 8, which is concluded as Theorem 9.
Theorem 9.
SGMW is ϵ-throughput-optimal scheduling policy in the proposed network model.
5.2. Discussion
The constraint on interservice time reduces the size of capacity region. This is due to the fact that some users with long queue and large arriving rate have to wait for other users to meet the constraint, and length of their queues could possibly tend to infinity. A smaller ϵ often leads to larger decrease in capacity region since the waiting appears more frequently. We formulate the decreasing in the size of capacity region in Theorem 11. Lemma 10 estimates the size of vector space composed of all vectors
Lemma 10.
For any vector
Proof.
We prove the lemma by induction.
Obviously, when
Assume


Theorem 11 gives the ratio between ϵ-capacity region and the original one.
Theorem 11.
The size of ϵ-capacity region
Proof.
Based on Lemma 6,

Assume there are t users with

According to Lemma 10,

The size of original capacity region is
We find that when
The performance of a system under an arriving rate vector is mainly represented by the total and max queue length of all users. An interservice time constraint can impair the performance due to the following reasons. (1) Some users with few data are scheduled for meeting the constraints, which potentially wastes the bandwidth. (2) A user with high arriving rate and large queue length still has to wait for other users due to the constraint, which potentially aggravates the max queue length. SGMW can achieve the best performance when it is always in the loose phase. Such situations occur when the constraint
6. Evaluation
In this section, we provide the simulation results of SGMW. Our results mainly include three parts. In Section 6.1, we check the interservice time performance of the policy. In Section 6.2, we compare the SGMW with baseline max weight scheduling policy. Both the total queue length and the max single queue length are selected as the evaluation criterion. In Section 6.3, we simulate the performance of SGMW under various arriving rate vectors. The vectors differ in the means and variances. The performance is evaluated by the statistics of the average appearance slot of tight phase in each interval. We assume
6.1. Interservice Time Guarantee
To illustrate the interservice time performance of SGMW, we assume four groups of flows, each with 4/8/16/32 flows. The arriving rate of user i is
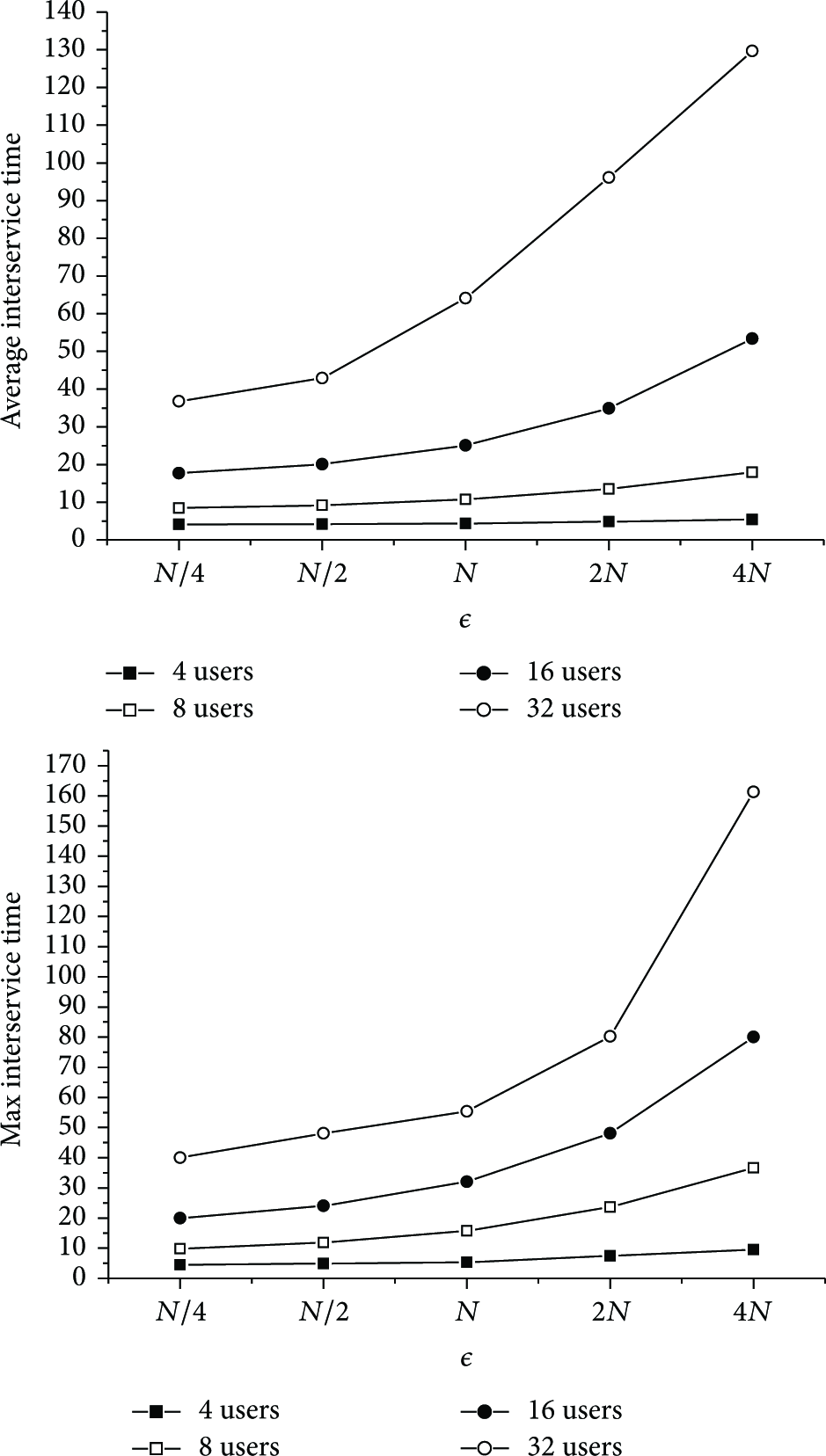
Interservice time performance under various users.
It is observed in Figure 2 that the max interservice time never violates the constraint while N and ϵ vary. We also find that the max interservice time when
In Figure 3, we investigate the performance of SGMW when the variance of arriving rate vector changes. The system is composed of 8 users, with

Interservice time performance under various arriving vectors.
6.2. Throughput Performance
This subsection illustrates the throughput performance of SGMW. We compare it with the max weight scheduling policy. The total queue length and max queue length are two indicators that define the loads of a system and a single user. In Figure 4, we check the performance under different number of users. We assume
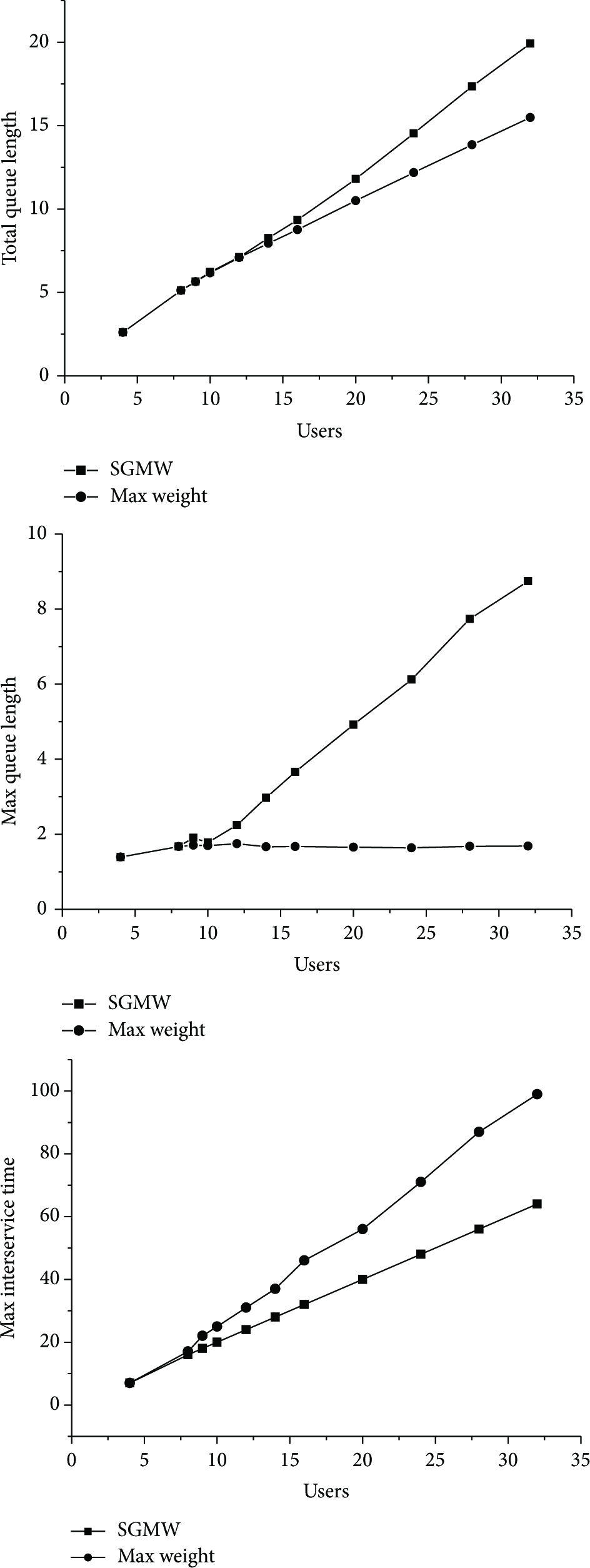
Throughput and interservice time performance under various users.
The total queue length of SGMW grows faster than max weight scheduling policy. This is due to the increasing number of users whose rate is less than
In Figure 5, we investigate the throughput performance of SGMW when the variance of arriving rate vector changes. The setting of the system is the same with that of simulation in Figure 3. The two policies are the same when δ is relatively small since the weight of any user can always grow to the maximum before the tight phase occurs. As δ keeps increasing, a growing number of users with small rate will only be scheduled in tight phase. Then the throughput performance of SGMW is no longer optimal.

Throughput and interservice time performance under various arriving vectors.
As a result, we find that SGMW achieves interservice time guaranteed by potentially increasing the total and max queue length. SGMW will schedule users with very small queue length for meeting the interservice time constraints. This leads to the increasing of the max queue length since a user with max queue length may still wait for other users. The total length of the system is further increased when SGMW schedules the user with queue length smaller than its transmitting rate. But the total and max queue length are still finite in the ϵ-capacity region.
6.3. Adaptability under Various Rate Vectors
As we can see, the performance of SGMW is mainly determined by the proportion of time that SGMW is in the tight phase and the number of users that are scheduled in this phase. We evaluate them in this subsection. There are 8 flows in the system, with arriving rate

Performance of SGMW under various interservice constraints.
7. Conclusion
This paper investigates the problem of interservice time guaranteed scheduling policy designing in wireless networks. We formalize the definition of modified capacity region with interservice time guarantee and propose a scheduling policy that meets the interservice time guarantee for all users. The scheduling policy is also proved to be throughput-optimal for the modified capacity region. Simulation results demonstrate that the scheduling policy has good performance on both the guarantee of interservice time and the stability of networks.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
The work in this paper was partially supported by the National Natural Science Foundation of China (NSFC) under Grant nos. 61190115 and 61033015.