
Abstract
The distributed target detection system with multiple Terahertz sensors is presented. With the different fusion rules of fusion center, the performance of the system is analyzed. The distribution of THz radar system noise is measured and investigated to confirm the applicability of the detection algorithm in THz band. Experiments with multiple THz sensors are performed to detect single and multiple point-like targets, respectively. The results show that the system proposed is able to detect target while giving the precise coordinates of the target in the observation area.
1. Introduction
The constant false alarm rate (CFAR) processors are usually utilized to automatic target detection in nonstationary noise and clutter background. CFAR processors can maintain a constant probability of false alarm during the detection. The threshold of the detector is set adaptively based on the noise power level estimated from the surrounding cells of the test cell [1]. In the literature, the CFAR detection problem has been studied extensively for both homogeneous and nonhomogeneous background [2–8].
In recent years, distributed CFAR detection systems have been widely considered. One of the main goals of using multisensors is to improve the detection system performance such as reliability, survivability, detection speed, and capability to handle a large area of coverage. Barkat and Varshney proposed the decentralized CFAR detection system with fusion center [9]. The local decisions of each CFAR processor are transmitted to the fusion center to obtain the global decision. Elias-Fuste developed the distributed detection system with different detection algorithms in each detector [10]. Üner and Varshney analyzed the performance of distributed ordered statistics (OS) CFAR detection system in homogeneous and nonhomogeneous background and compared it with distributed cell averaging (CA) CFAR system [11]. More recently, various distributed detection systems are proposed with different detection algorithms and analyzed in different backgrounds [12–15].
Terahertz (THz) wave lies between microwave and infrared radiation. Due to the large bandwidth and short wavelength, it can provide higher resolution in range and azimuth domain. THz wave is able to penetrate the nonpolar, nonmetallic materials which provide the possibility of detecting concealed items, such as money, weapons, and bombs in packages, shoes, and clothes. Moreover, compared with millimeter wave and X-ray, THz wave is nonionizing and harmless to the operator and individuals under surveillance [16–18]. Therefore, THz wave is widely applied in many areas such as security, communication, monitoring, and biomedicine [19–21]. However, the target detection system with THz sensors is rarely implemented or reported.
In this paper, the distributed CFAR detection system with multiple THz sensors is presented and the performance is analyzed. The single and multiple point-like targets detection experiments with high resolution THz radar system are performed to validate the distributed CFAR detection algorithm.
The rest of this paper is organized as follows. Section 2 describes the distributed CFAR detection system, and the performance is analyzed. Section 3 gives the experimental results of THz radar system noise and target detection with THz sensors. Finally, the conclusions of this paper and the further work are provided in Section 4.
2. Distributed CFAR Detection
2.1. Cell Averaging CFAR Detection
The CA-CFAR technique is widely utilized in detection of target embedded in a Rayleigh environment. The noise and clutter power level is estimated by the contents of N reference cells surrounding the cell under investigation (CUT) under the assumption of exponentially independent and identically distributed homogeneous noise background. The block diagram of the CA-CFAR detector is shown in Figure 1. The neighboring cells of the CUT are named protection cells. They are set to avoid the disturbance of cross-cell target to the estimation of noise power.
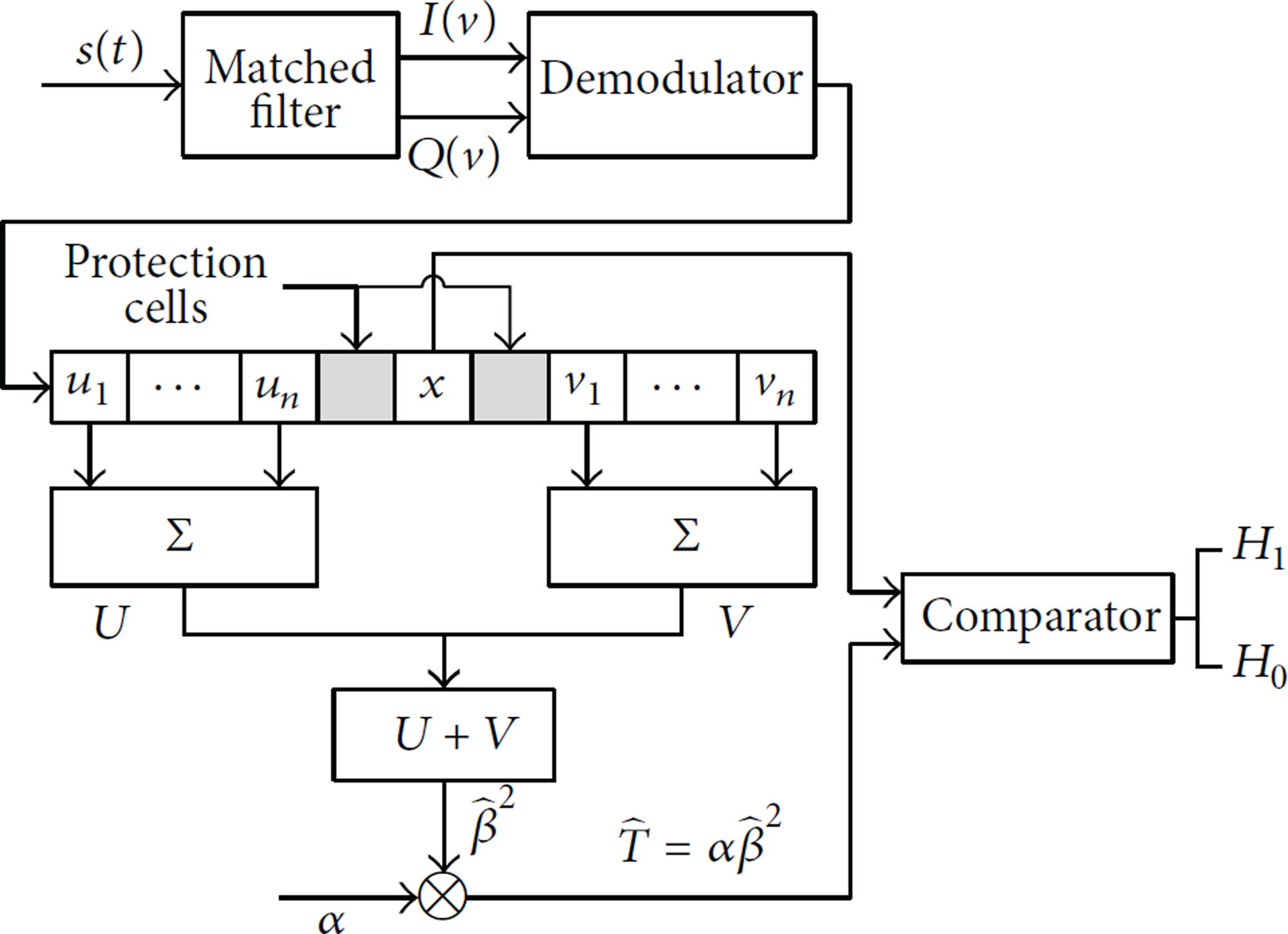
The block diagram of CA-CFAR detector.
Assuming that the noise is independent and identically distributed in different cells and the square-law detector is utilized, then the noise power can be estimated as



From (3), we get that the PDF of threshold

Under the assumption, the false alarm rate is

The probability of detection can also be obtained as

2.2. Distributed CFAR Detection with Multisensor System
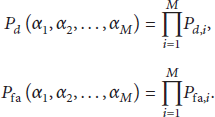
The distributed detection system with M sensors and a data fusion center is considered as shown in Figure 2. Each sensor receives the scattering signal of a Swerling type I model target and background from different observation angle. The probability of false alarm and the probability of detection at the individual detectors are denoted by (5) and (6), respectively. The observations and the decisions of the local detectors are assumed to be independent. The sample in the CUT for the ith sensor is denoted by
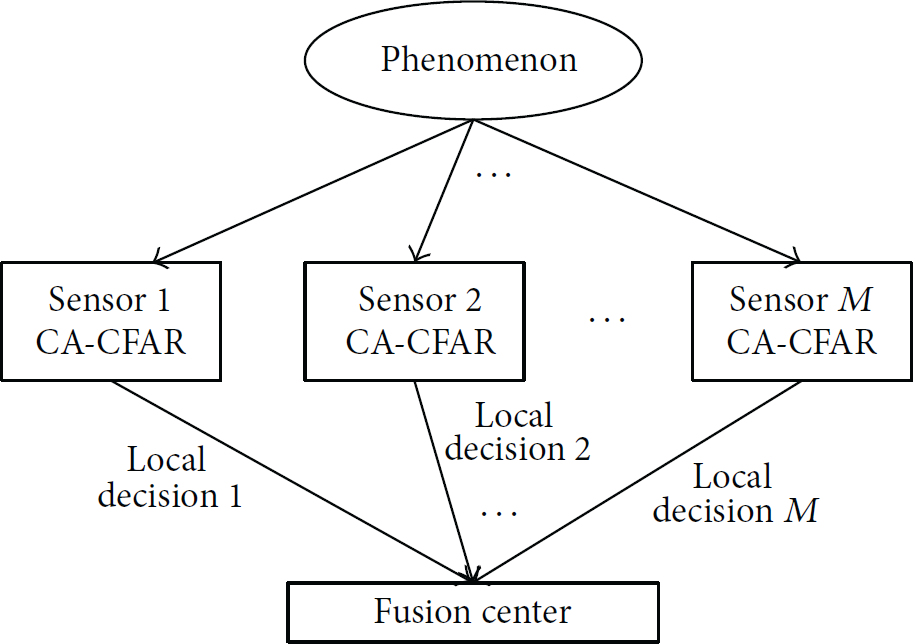
Block diagram of distributed CA-CFAR detection with data fusion.
In the distributed detection system with CA-CFAR local detectors operating in a homogeneous background, for a given data fusion rule, the global detection probability is maximized by optimizing the parameters of the local detectors simultaneously. For ith local detector, the parameter is the scaling factor

In the optimization procedure, we set the derivatives of the objective function,

With this set of equations, using the constraint

we obtain
2.3. Numerical Analysis Result
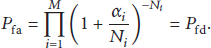
For the AND rule, we have
With (5), (6), and (10), the objective function in (7) can be rewritten as

Then, the derivation of objective function can be rewritten as

The threshold multipliers
With (12) and (13),
In particular, when

For the OR rule, false alarm and undetected probability is

The objective function then becomes

Substituting (5) and (6) into (17), the objective function can be expressed as

Note that in this case we have to minimize the objective function since we are minimizing the overall probability of a miss, which is equivalent to maximizing detection probability at the data fusion center as (16). Taking the derivative of the objective function with respect to

Hence, we obtain a system of M coupled nonlinear equations in


By setting the derivatives equal to zeroes, we have the nonlinear equations

Hence, the constraint in (20) can be expressed as


Substituting (24) into the derivatives of (21) and using the numerical method, we obtain the approximate values for

Simulation results. (a) The number of
As shown in Figure 3(a), after 26 iterations, the values of
The performances of AND-CA-CFAR, OR-CA-CFAR, and single-sensor CA-CFAR detection in terms of

Performance comparison of two-sensor detection system with single-sensor system,
For the general cases, when the number of sensors is larger than 2, solving (12), (13), (19), and (20) does not lead to closed form solutions. However, the approximate solutions can be obtained by numerical methods, as Search method, Dichotomy, and Parabolic method.
3. Experiments
In this section, according to the application of ground-to-air THz radar, the distribution of THz system noise is measured. Then, the performance of the distributed CA-CFAR detector is analyzed. At last, the distributed detection experiment is performed by the THz radar system.
3.1. Noise Distribution of THz Radar System
According to the application scene of ground-to-air THz radar, the experiment is set up as shown in Figure 5. The operation frequency of THz radar system is 0.34 THz, and the bandwidth is 28.8 GHz. The height of radar antenna is h, the beam angle is θ, and the THz wave is transmitted horizontally. The width of observation scene is fixed and the distance of scene center to the radar is modulated to insure that there is no target or ground scattering THz wave in the observation scene. Then, the receiving signal contains only the noise of THz radar system.

The design of THz radar system noise measurement experiment.
The experimental data is as shown in Figure 6, where Figure 6(a) is the spectrum of multipulses. The distribution of I and Q channel and the output of linear demodulator are shown in Figures 6(b), 6(c), and 6(d), respectively.

The noise of THz radar system. (a) The spectrum of multiple pulses; (b) the distribution of I channel; (c) the distribution of Q channel; (d) the distribution of linear demodulator output.
In Figures 6(b) and 6(c), the red line is the PDF of standard normal distribution calculated by the mean value and variance of I and Q data. As we can see from the figures, the data in I and Q channel obey the standard normal distribution. In Figure 6(d), the red line is the PDF of Rayleigh distribution, which is consistent with the data distribution. So the distribution of THz radar system noise satisfies the demand of CA-CFAR detection algorithm.
3.2. Experiments Results
In this subsection, we present the distributed sensors detection experiment with THz radar system. The sensors are evenly distributed on a circle with the radius R to the center of observation scene as shown in Figure 7. The corner reflector is placed on the styrofoam supporter whose scattered power is far lower than the target. The spectrum of the received signal and threshold of number 1 sensor are shown in Figure 8(a). The local decision of number 1 sensor obtained by CA-CFAR with
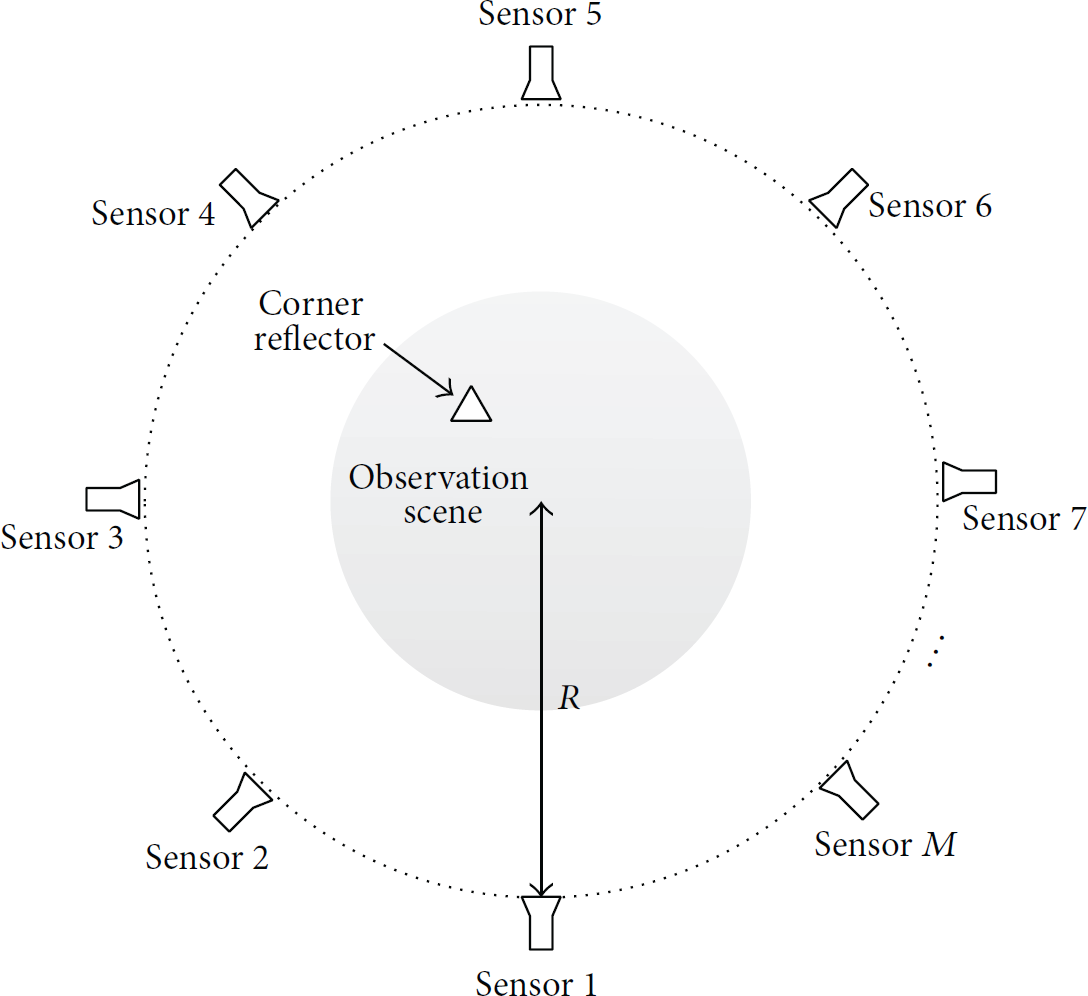
The distribution of sensors.

CA-CFAR detection of number 1 sensor. (a) HRRP and threshold of number 1 sensor; (b) local decision of number 1 detector.
Because the high resolution range profile (HRRP) of each sensor can be regarded as the projection of observation scene on the line of sight (LOS) of radar, the one-dimensional decision of each detector can be expanded to the two-dimensional decision space as shown in Figure 9. Firstly, the local decisions of each sensor can be obtained by the local CA-CFAR detector. With the one-dimensional decision and sensor location related to the observation scene, the curved target trace can be obtained in the two-dimensional decision space. Finally, the global decision is obtained by multiple local decisions in the fusion center. With multiple local decisions, we can obtain not only the global decision of whether the target is absent in the observation scene, but also the target coordinates in the two-dimensional image.
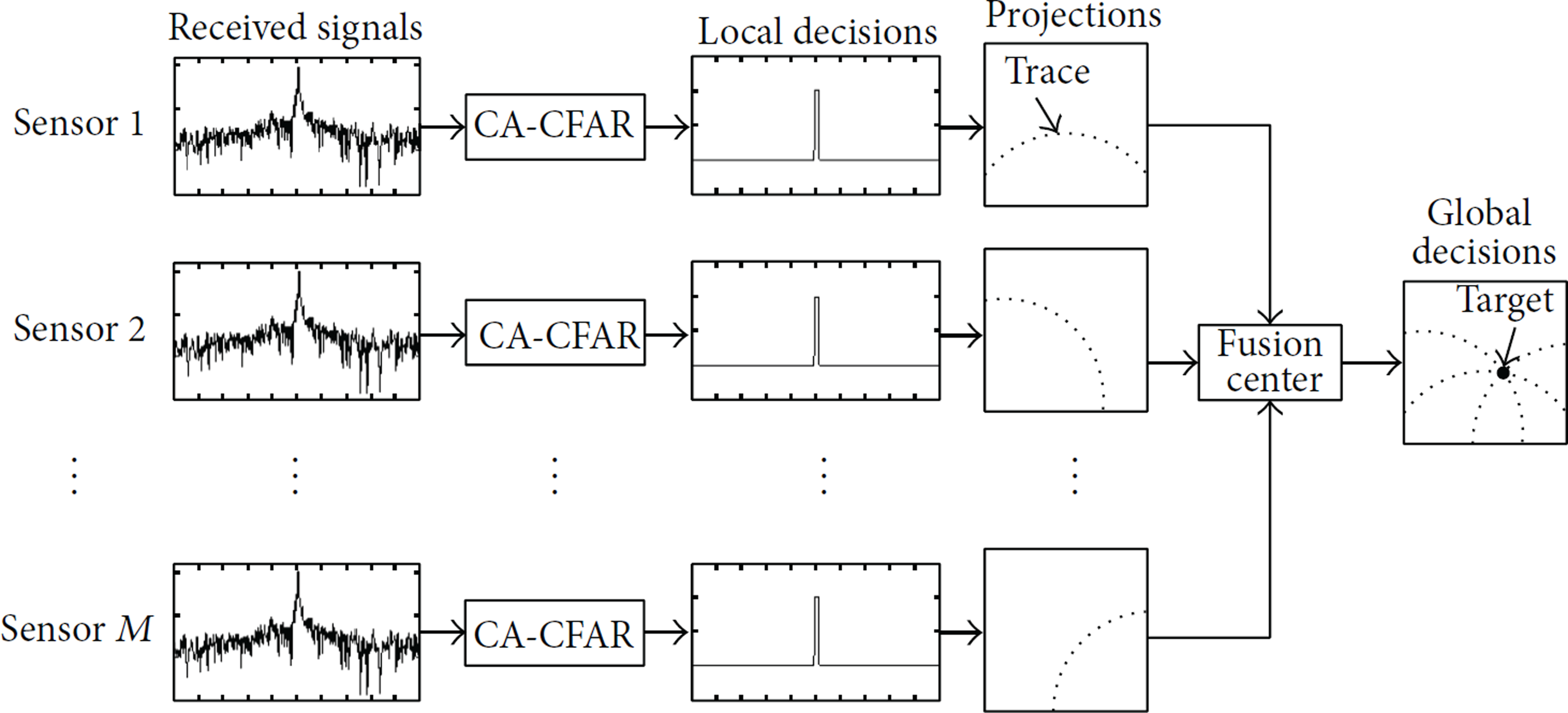
Distributed sensor detection with decision projection cell.
The experiments of distributed systems with two and three sensors are performed with

Distributed CFAR detection with two-sensor system. (a) The distribution of two-sensor system. (b) Global decision space of two-sensor detection system. (c) Local decision space of number 1 sensor. (d) Local decision space of number 2 sensor.

Distributed CFAR detection with three-sensor system. (a) The distribution of three-sensor system. (b) Local decision space of number 1 sensor; (c) local decision space of number 2 sensor; (d) local decision space of number 3 sensor; (e) global decision space of three-sensor detection system.
To demonstrate the multiple target detection ability of multisensor detection system, the experiment of distributed detection system with 3 corner reflectors is performed. The number of sensors is increased to 180. All sensors are evenly distributed on a circle with the radius of 2.5 m to the center of observation scene. The global decisions obtained by OR and

Global decision space of 180-sensor detection with 3 targets. (a) The global decision of OR rule; (b) the global decision of
The global decision of OR rule shown in Figure 12(a) shows that the three targets are located in three zones, respectively. This is the result of range ambiguity of radar. With the high resolution of THz radar, the area of each zone (dark color area) is smaller than
4. Conclusions
The diagram of distributed CA-CFAR detection system with multisensor is presented in this paper. The distributed detection system transmits the local decision of each CA-CFAR detector to the data fusion center. The global decision is obtained at the data fusion center based on AND, OR, and
The detection method is available for the point-like target. However, the target will be inclined to occupy more than one range cell when the range resolution is smaller than the length of target. Then, the CA-CFAR detection method will not be applicable. In the next stage, a great effort will be devoted to the distributed CFAR detection method of range extent targets researching and the target characteristics in THz regime.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work is supported in part by the National Natural Science Foundation of China under Grants 61271287 and 61371048.