
Abstract
For a hybrid sensor network, the effective coverage rate can be optimized by adjusting the location of the mobile nodes. For many deployments by APF (artificial potential field), due to the common problem of barrier effect, it is difficult for mobile nodes to diffuse by the weaker attraction when the nodes initially distribute densely in some places. The proposed deployment algorithm PFPSO (Potential Field-Directed Particle Swarm Optimization) can overcome this problem and guide the mobile nodes to the optimal positions. Normally the requirement is different for the effective coverage rate between the hotspot area and the ordinary area. On the basis of PFPSO, NPFPSO (Nonuniform PFPSO) algorithm was also proposed to implement nonuniform coverage according to the importance degree of the monitoring area. Simulation result illustrates that PFPSO algorithm can effectively improve the effective coverage rate of the network, and NPFPSO algorithm can obtain a balanced result of effective coverage rate for both hotspot area and ordinary area.
1. Introduction
The wireless sensor network becomes a research hotspot because of its great application value in the military and environmental monitoring. In most applications, manual deployment is nearly impossible because it is hard for human to approach the target field. In traditional deployment strategies, a plenty of fixed nodes including many superfluous nodes are dropped dispersedly on the target area by airplane to guarantee the effective coverage rate; these nodes can be used for targets monitoring and events tracing. In most cases these redundant nodes are involved in the communication of the whole tasks, and it can guarantee the service completed. Apparently this deployment manner will generate a lot of redundant nodes to guarantee effective coverage rate, and it is not an optimal way to complete the tasks. Although sometimes this manner can enhance the service quality of the network, it causes a lot of waste of devices and leads to conflict of communication, energy waste, and shortening network lifetime. As we know, the network with fixed sensor nodes cannot repair the coverage of network by itself due to its poor environmental adaptability. The mobile sensor networks only composed of mobile nodes can increase the coverage rate and improve network service quality by guiding the nodes moving. But, unfortunately, mobile node is a bit too expensive to be suitable for large-scale deployment. The hybrid sensor networks consist of both fixed nodes and mobile nodes, and the mobile nodes can repair the coverage holes where the fixed nodes cannot cover them by adjusting the positions of mobile nodes. It can achieve a better balance between the economy and network service quality.
For wireless sensor networks, a reasonable deployment can save more time and money to set up a network and quickly cover the target area. It can extend the network lifetime by coordination control and adapt to the change of network topology. The network's coverage rate directly affects the accuracy and comprehensiveness of the monitoring result. Deployment optimization problem of hybrid sensor network has been proved to be an NP-hard problem [1]. The deployment for hybrid sensor networks is more complex than the pure mobile sensor networks due to the existence of fixed nodes. Considering the characteristics of the hybrid sensor networks, we proposed the PFPSO (Potential Field-Directed Particle Swarm Optimization) algorithm to optimize the deployment when mobile nodes distribute densely in some places. It can overcome the common defect of APF approach, enhance the convergence speed, and improve the effective coverage rate.
In more realistic environments, such as detecting coastal water quality in drain outlet or harbor areas and searching and rescuing in some sea areas, high surveillance accuracy is required for these hotspot regions and low accuracy for less focal regions. The region which is more important and is with higher event occurrence probability can be regarded as hotspot region. Therefore, according to the importance of the target area, we proposed the NPFPSO (Nonuniform PFPSO) algorithm for nonuniform coverage by modifying the fitness function of PFPSO and velocity components of APF. It can improve the detection probability and effective coverage rate of hotspot areas and get a balanced result of effective coverage rate for both hotspot area and ordinary area.
The rest of this paper is structured as follows: Section 2 introduces some related research work of deployment issues of WSN. The generalized problem of uniform coverage and nonuniform coverage is stated in Section 3. PFPSO and NPFPSO deployment algorithms are stated in detail in Sections 4 and 5. PFPSO performance evaluation and the virtual force acceleration parameter
2. Related Works
2.1. Uniform Coverage
There are many deployment strategies in the mobile sensor networks, which can be divided into virtual force, swarm intelligence algorithms, and computational geometry. However, in these common strategies, there is less attention on hybrid sensor networks, and many of the algorithms applied in mobile networks are not applicable for hybrid sensor networks.
Zou and Chakrabarty [2] proposed a Virtual Force Algorithm (VFA) which assumes that repulsion and attraction exist among the sensor nodes. When the distance between two nodes is less than the threshold
Huang [3] proposed a self-deployment method named as Ion-6. The mobile nodes are modeled as ions which are linked by ionic bonds. The mobile nodes achieve even distribution by forming a regular hexagonal topology. Wang et al. used Voronoi diagrams to detect coverage holes and proposed three protocols: VEC,VOR, and Minimax to control the movement of mobile nodes [4]. Because all these methods do not consider the influence of fixed nodes, these geometry-based deployment strategies cannot be applied in hybrid networks. Wang et al. [1] proposed the bidding protocol based on Voronoi diagram and greedy algorithm which can be used in hybrid sensor network. In this algorithm, the coverage holes will be detected by Voronoi diagram, and then the surrounding mobile nodes will be bidden. Mobile nodes with the highest bidding will be chosen to move to the target point and repair the coverage holes. In this process, mobile nodes can get rid of the constraint from fixed nodes. But obtaining Voronoi diagram needs the global location information of all other nodes in the network. Moreover, it is not flexible enough to find the target position of mobile nodes.
Wu et al. [5] used PSO in ad hoc network deployment optimization to improve network coverage rate. However, the convergence speed of coverage rate goes up slowly due to the velocity of particles in PSO updating randomly, and the computational complexity will rise exponentially as the number of mobile nodes increases. In order to improve the convergence speed and reduce the computational complexity of the algorithm, Wang et al. proposed parallel PSO (PPSO) algorithm [6] and virtual force directed PSO optimization (VFPSO) algorithm [7], and CVFPSO [8]. The algorithms can perform global searching by PSO to overcome the barrier effect of fixed nodes and perform particle acceleration by using the virtual force between the nodes. The VFPSO and CVFPSO algorithms based on virtual force all need to set up the threshold distance
2.2. Nonuniform Coverage
When we consider the importance of monitoring area and the factors of event probability of occurrence for nonuniform coverage, these algorithms above are not applicable for the problems. Currently there are few researches on nonuniform coverage. Nonuniform coverage solutions could be divided into two categories, the first achieves different detection probability for the points in the region, and the second makes the node density consistent with the event probability of occurrence in the target area.
Zou and Chakrabarty [9] proposed the Max-Avg-Cov algorithm to maximize the monitoring points of average coverage and proposed the Max-Min-Cov algorithm to maximize the monitoring points of minimum monitoring probability based on the probabilistic detection model of sensor. Aitsaadi et al. [10] proposed PFDA algorithm and MODA algorithm based on artificial potential field method, which combines artificial potential field method and Tabu search algorithm to perform complete coverage for the target area. However, the nodes deployment strategies above in initialization stage need to be deployed manually, so it is not applicable for the sensor networks with random deployment [11]. The deployment goals of these algorithms above are to have the points in monitoring area achieve the expected measuring probability to meet the coverage requirements.
Koutsougeras et al. [12] used SOM (Self-Organizing Maps) method to distribute sensors for events coverage by utilizing the attraction from events to nodes and the phenomenon of nodes trending to move to the area with high density of events. Xia et al. [13] defined the conception of entropy to evaluate the balance of coverage and effective coverage of events and proposed a fish swarm inspired underwater sensor deployment algorithm: FSSD. He considered the crowed factor of the fish swarm and simulated the behavior of fish swarm. The method can drive the sensors to cover almost all the events and make the density of sensors match the density of the events. All the algorithms above adopt event-driven coverage model and let nodes cover events to optimize detection quality as far as possible. But they do not consider the network connectivity problems, and the events density cannot always correctly express the difference between hotspot area and the ordinary area in practice.
3. Concepts Statement and Precondition Assumption
3.1. Hybrid Sensor Network
Hybrid network is a network which is composed of fixed nodes and mobile nodes. At the beginning of deployment, all nodes are deployed in the region randomly, the fixed nodes will be fixed at a position and never move again, and on the contrary the mobile nodes could even move on. Compared with mobile network, the hybrid network could save more energy efficiently. Compared with fixed network, the hybrid network could save more resource of devices and has more flexibility to adapt to different environment. So it has more significance to be used in reality. But, sometimes, when we optimize hybrid networks by moving mobile nodes with some potential field algorithm (such as APF), it will face the problem of barrier effect which will weaken the effectiveness of the optimization.
3.2. Sensor Detection Model

In practical application, due to the terrain, obstacles, and noises, the binary model will not be applicable to describe the situation. In fact, the perception model of sensor nodes is illustrated as a certain probability distribution model. The monitoring probability will decrease with the distance


Figure 1 illustrates the curve of detection probability of sensor nodes changing with the distances.

The curve of detection probability of sensor nodes changing with distance.
3.3. Uniform Coverage Problem in Hybrid Sensor Networks
Suppose that all the nodes are randomly scattered in a two-dimensional monitoring area A while initializing. If point p is within the probabilistic perception of the sensor


The deployment of a sensor network should both meet the condition of coverage and meet the condition of connectivity. When the node communication radius is more than twice the radius of perception, the coverage problem should only be considered for a sensor network, since this condition can guarantee the connectivity of the network [15–17]. Therefore, in this paper, we assume that there is a sink node which can collect location information of all nodes in the target area, and the communication radius of ordinary nodes meets the following condition:
To summarize, the uniform deployment of hybrid sensor networks can be described as follows: m fixed nodes and n mobile nodes are scattered randomly in the target area A. We can adjust the position of mobile nodes to maximize the effective coverage of target area. In particular, when
3.4. Nonuniform Coverage Problem of Hybrid Networks
According to the monitoring requirements for different regions in target environment, sometimes we need to perform the nonuniform coverage in target area. It can pay more attention to some hotspot areas with more nodes and simplify sensor resources for some ordinary areas. Suppose A represents the 2-D target area,


Thus the nonuniform deployment of hybrid sensor networks can be described as follows: m fixed nodes and n mobile nodes are scattered randomly in the target area A. We can adjust the positions of mobile nodes to maximize the effective coverage rate of hotspot region and ordinary surveillance region. In particular, when
4. PFPSO Algorithm for Uniform Coverage
For PSO algorithm, the initial position and velocity of the particles are generated randomly. It cannot guide the particles moving effectively only depending on these parameters: the particle velocity, the individual best position, and the global colony best position. On the other hand, by APF algorithm, the mobile nodes can bypass the fixed nodes and repair the coverage holes by the attractive force generated by uncovered grid points. However, sometimes it will meet the problem of barrier effect: when the fixed nodes distribute in some region with high density, the coverage probability will be high in their neighboring regions, and the nearby mobile nodes will be difficult to spread due to the diminishing attraction by the coverage hole. That is to say we cannot obtain an ideal optimal result only depending on any single one of these two algorithms.
The proposed PFPSO algorithm integrates their advantages of artificial potential field and particle swarm optimization organically. It can own two functions: (1) With the direction of the virtual force, the mobile nodes could move towards the better position to heal the coverage holes. (2) Implementing global optimization to make the mobile nodes overcome the barrier effect from the fixed nodes.
4.1. Some Basic Concepts in PFPSO Algorithm
The virtual force derives from artificial potential field, which was originally introduced to robot path planning to avoid obstacles and find the optimal path [10, 18, 19]. Here every node can move under the resultant force by the attractive force from targets and the repulsive force from obstacles. This kind of resultant force

The deployment optimization problem of hybrid sensor network can be treated as healing coverage holes. The coverage hole will produce an attractive force to the mobile modes. So, in this paper, we assume the point whose detection probability does not meet the condition of detection will generate an attractive potential field to the mobile nodes. The potential field function can be given by the following formula [10]:


The virtual force



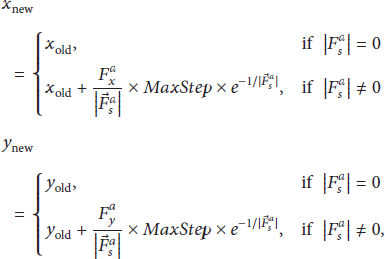
Then the sensor nodes will update the original location
Particle swarm optimization is a stochastic global optimization algorithm for seeking the solution by imitating the flocks of bird [20, 21]. Due to fast convergence and less parameters for setting up, it is widely used in solving problems of multidimensional space. Suppose

The best position of the colony


4.2. The Principle of PFPSO
In order to enhance the effectiveness of coverage of the network, a kind of central scheduling deployment strategy was proposed, which integrates APF and PSO algorithm and overcomes the disadvantages of the two algorithms in hybrid networks deployment. Suppose a sink node in the target area can collect the information of coordinates for all the nodes; we can perform PFPSO algorithm and inform mobile nodes to move to the designated location directly according to the calculation result. This can reduce the moving distances of the nodes in the process of optimization.
Assuming n mobile nodes and m fixed nodes are randomly deployed in the target area. The position coordinates of n mobile nodes can be regarded as one solution of PFPSO algorithm. The dimension of the searching space

For PFPSO algorithm, the velocity of each particle is updated according to not only the historical optimal solutions of local and global positions, but also the attractive force exerting on mobile nodes. The influence of attractive force is reflected in the additional last item of formula (19). So the traditional velocity updating formula of PSO has been improved in PFPSO:


The PFPSO algorithm's flow chart is illustrated as Figure 2.
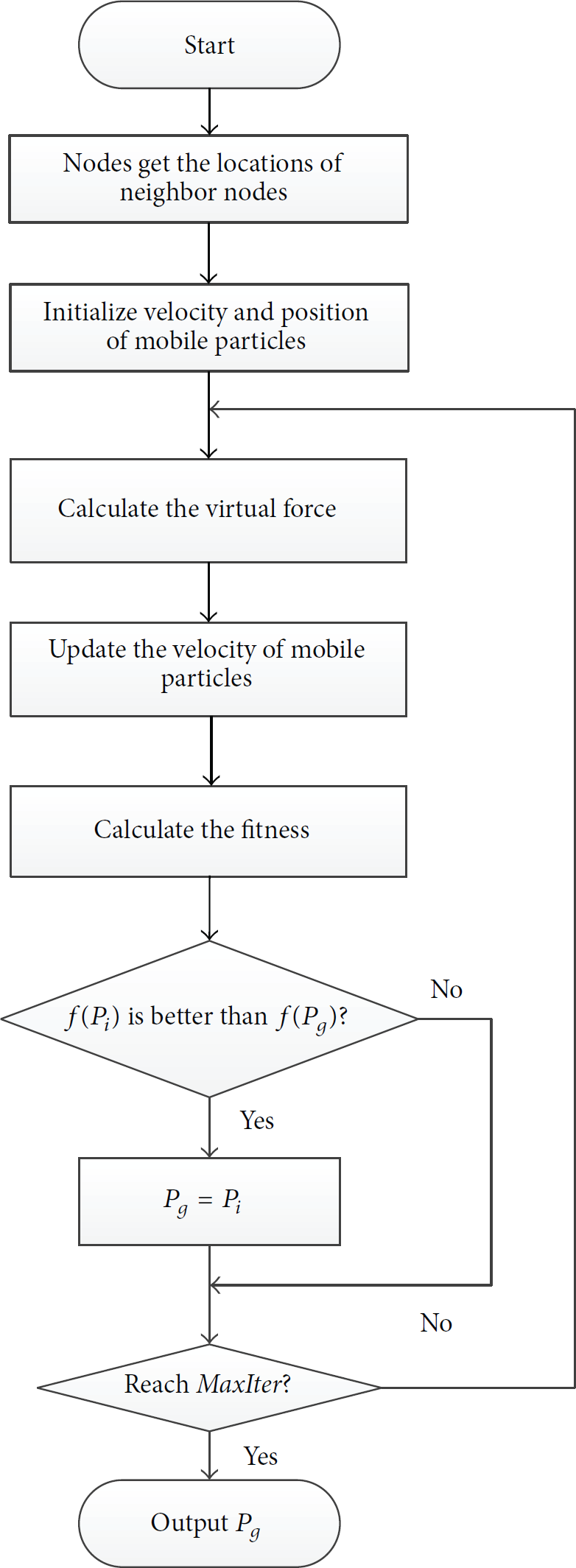
PFPSO algorithm's flow chart.
The pseudo code of PFPSO is as shown in Algorithm 1.
Mobile nodes original coordinates Mobile nodes number n Particle number M Detection parameters of sensor The target field A Effective detection probability threshold Maximal iteration of PFPSO MaxIter
The new coordinates of mobile nodes The effective coverage of the target field (1) (2) (3) (4) (5) Calculate the (6) (7) (8) (9) (10) (11) (12) (13) Calculate attractive virtual force ( ( ( ( ( ( (20) (21) (22) (23) (24)
5. NPFPSO Algorithm for Nonuniform Coverage
Nonuniform coverage of hybrid sensor network can be regarded as a multiobjective optimization problem. Assume that

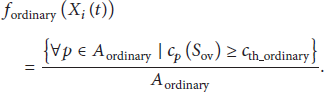
What the nonuniform coverage needs to do is to maximize the objective functions

Normally different target areas have different detection thresholds in nonuniform coverage of target environment. In order to make potential field force guide the mobile nodes moving more effectively, we improved formula (13) as the following formula:


The NPFPSO algorithm's flow chart is illustrated as Figure 3.
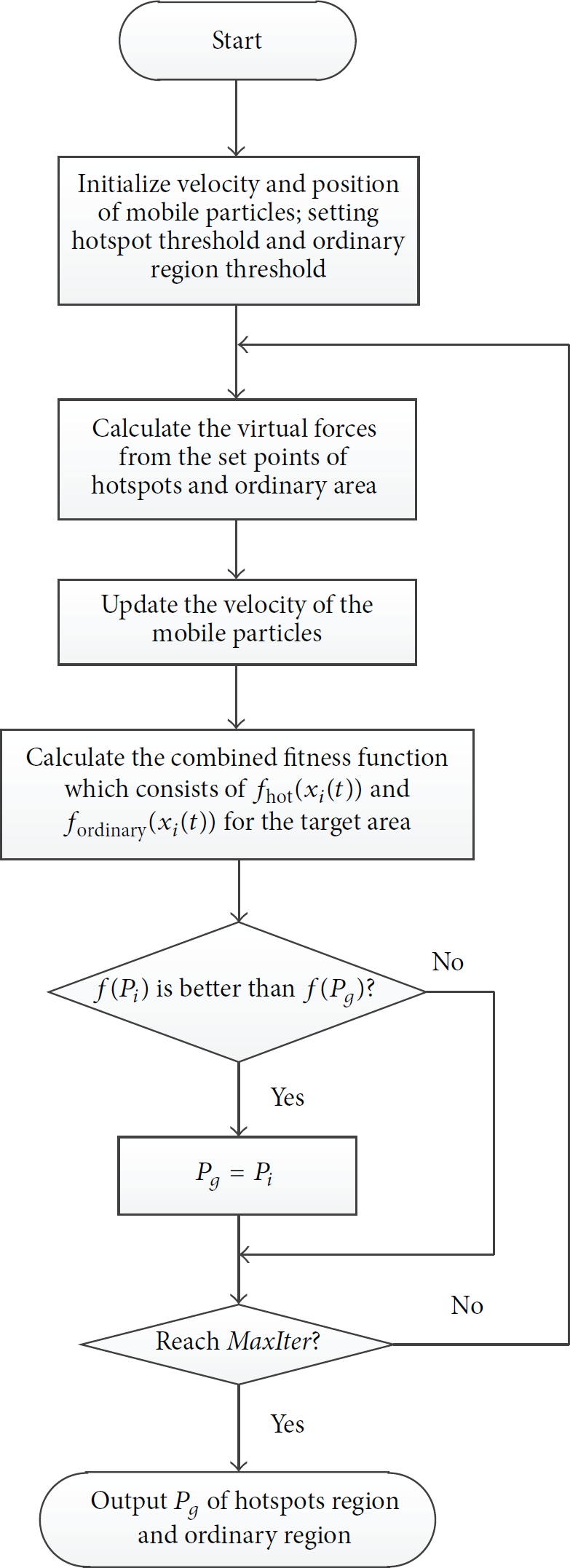
NPFPSO algorithm's flow chart.
The pseudo code of NPFPSO algorithm is as shown in Algorithm 2.
Mobile nodes original coordinates Mobile nodes number n Particle number M Detection parameters of sensor The important regions The ordinary regions Important effective detection probability threshold Ordinary effective detection probability threshold Weight coefficient α Maximal iteration of NPFPSO MaxIter
The new coordinates of mobile nodes The effective coverage of the important region The effective coverage of the ordinary region (1) (2) (3) (4) (5) Calculate the (6) (7) (8) coverage (9) (10) (11) (12) (13) (14) Calculate attractive virtual force (15) (16) Compute the velocity (17) (18) Compute the (19) (20) (21) (22) (23) (24) (25) (26) (27)
6. The Simulation Testing of PFPSO and Performance Analysis
To investigate the performance of PFPSO in the deployment optimization, we simulate the algorithms in the simulation platform MATLAB2009. In this simulation, the problems of energy consumption and routings of the network are not involved. Supposing the monitoring target area is a 2-D square region with area of 200 m × 200 m, 100 ordinary nodes are scattered randomly on this square target region which are composed of m fixed nodes and n mobile nodes. In order to expediently evaluate the effective coverage of wireless sensor network, the target region is divided into 40000 grids with each area of 1 m × 1 m. We can calculate the detection probability of each grid, and the proportion of these grids which meet formula (5) is the effective coverage rate of the network. Some simulation results indicated that the absolute deviation between calculated value and the precise value of the coverage measure will be in the range of 0.1%–0.5% when the granularity (the distance between grid points) is as the scale of 0.25%–4% relative to the size of the target monitoring area [13]. The parameters of probabilistic detection model are set as
6.1. The Effectiveness of PFPSO Compared with Other Typical Algorithms
Suppose in some cases the mobile nodes are initially distributed in dense state, and we want to make them scatter out in the target area for an optimal coverage. For example, 60 fixed nodes are randomly deployed uniformly in the region of 200 m × 200 m 2-D area and 40 mobile nodes randomly distributed in the central square region with the area of 100 m × 100 m. The initial coverage diagram is shown as Figure 4. In this figure, the red regions represent the detection probability of 100%, the blue regions mean the detection probability does not reach the threshold, and the transitional color shows that the detection probability of the point is higher than the threshold but lower than 100%.

Initial coverage state for uniform coverage testing.
Figures 5(a) and 5(b) show the coverage diagram by APF algorithm with running 50 iterations and the corresponding trajectories of mobile nodes, respectively. Apparently there are more uncovered regions with blue color in Figure 5(a), and the mobile nodes are almost bounded in the central area as shown in Figure 5(b). Figure 5(b) illustrates the moving status of mobile nodes from the original position “•” to the terminal position “o,” and “∗” represents the fixed node distributed randomly. Apparently APF algorithm cannot achieve the desired optimization of coverage when mobile nodes are influenced by the barrier effect due to the smaller attractive force generated by uncovered grid points acting on the mobile nodes.

Simulation results of APF algorithm when mobile nodes are influenced by barrier effect.
In order to verify the effectiveness of PFPSO, suppose the local and global optimum values in PSO and the virtual force exerting on mobile nodes generate the same impact on the position optimization of mobile nodes, which is to set the acceleration factors as follows:

Simulation results of PFPSO algorithm when mobile nodes are influenced by barrier effect.
Investigating the two figures, Figures 5(a) and 6(a), we can find the coverage rate by performing PFPSO has been improved a lot comparing with APF method. We also test the pure PSO algorithm under the same initial coverage state, and the whole testing results of coverage rate for these three methods are shown in Table 1. Figure 6(b) illustrates the displacement of mobile nodes from their original position “•” to the terminal position “o” and the “∗” represents the fixed node distributed randomly. As Figure 6(b) illustrates, apparently the mobile nodes can diffuse from the original central area to all the other areas uniformly for repairing the coverage holes. Duo to adding an item of velocity component caused by virtual force in the velocity update calculating as formula (19), the velocity of the mobile nodes in PFPSO is higher than the velocity in APF and PSO algorithm. It has been advantageous to make the nodes spread rapidly, and it is more useful to overcome the barrier effect of fixed nodes encapsulated.
Coverage comparison for these three algorithms.

Figure 7 and Table 1 illustrate the raising curve of effective coverage and the final coverage rate after 100 iterations for APF, PSO, and PFPSO, respectively. In Figure 7 we can find that the two coverage curves of PSO and PFPSO rise rapidly and almost overlap in the first 10 iterations. It indicates that the mobile nodes are mainly guided by the velocity component of PSO in the preliminary stage of optimization of PFPSO. With increasing of iterations, the curve of PSO increases slowly in later period, and it is exceeded by APF at the 28th rounds of iteration. During 10 to 50 rounds of iteration, the slopes of the curve of PFPSO and APF are roughly similar which indicates that the mobile nodes are mainly guided to optimal position by the attractive force. In addition, as shown in Figure 7 and Table 1, we can find that the convergence speed of PFPSO algorithm is obviously higher than APF and PSO. So PFPSO can effectively overcome the barrier effect from the fixed nodes as using potential field method, and it can achieve a higher coverage rate for performing optimization.

Effective coverage curves of the three algorithms.
6.2. Discussion Regarding Parameter
Evaluation
For formula (19), when 
The three lines are shown in Figure 8 where

Three changing lines of parameter
In Figure 9, effective coverage rates corresponding to

Effective coverage curves by performing PFPSO based on three changing lines of
This phenomenon can be explained that in the early state it is difficult to diffuse for the mobile nodes densely gathered in the centre region due to the fixed nodes blocking as a barrier. At this time the coverage probability will be high in their neighboring regions, so the mobile nodes will be difficult to spread due to the lower attraction by the coverage holes. In this state the mobile nodes mainly depend on the local and global optimization factors of the particles to update their positions. With the mobile nodes no longer gathering in a dense state, the parameter
So two conclusions could be achieved: (i) The convergence speed will be different if the changing trend of
7. NPFPSO Performance Analysis
Assuming the target environment is a square region with the area of 200 m × 200 m the hotspot region

Initial coverage state for ununiform coverage testing.
The acceleration factors in NPFPSO are set as follows:
We can verify the nonuniform deployment algorithm with two types of hotspot region distribution: (i) The hotspot region is in the center of target area. (ii) The hotspot region is in the left bottom corner of target area.
7.1. Hotspot Region in the Center
Figure 11 illustrates the coverage state, displacement of mobile nodes, and coverage curves when NPFPSO algorithm is performed for 50 iterations with weight parameter

Nonuniform coverage by NPFPSO with hotspot region in the center (
The region of dotted frame in Figure 11(b) is the hotspot area. The mobile nodes moved from the original “•” to the terminal “o.” We can find that originally all the nodes distribute randomly in the target area. With NPFPSO performing, the number of mobile nodes in dotted frame increases. After optimization, the number of increased mobile nodes in the centre frame is 7, and the effective coverage rate of hotspot region increases 38.61% compared to its initial state. The red line in Figure 11(c) represents the effective coverage rate of hotspot areas and the blue line represents the effective coverage rate of ordinary area.
A set of Pareto optimal solutions with different weight parameter α is given in Table 2. The effective coverage of hotspot area and ordinary area is listed inside.
Comparison table of effective coverage with different weight parameter α when hotspot region is in the center of the target area.

Comparing the two circumstances above, adjusting the value of α can change the effective coverage when the number of mobile nodes is 40. When
7.2. Hotspot Region in the Left Bottom Corner
Figure 12 illustrates the coverage state, displacement of mobile nodes, and coverage curves when NPFPSO algorithm is performed for 50 iterations with weight parameter
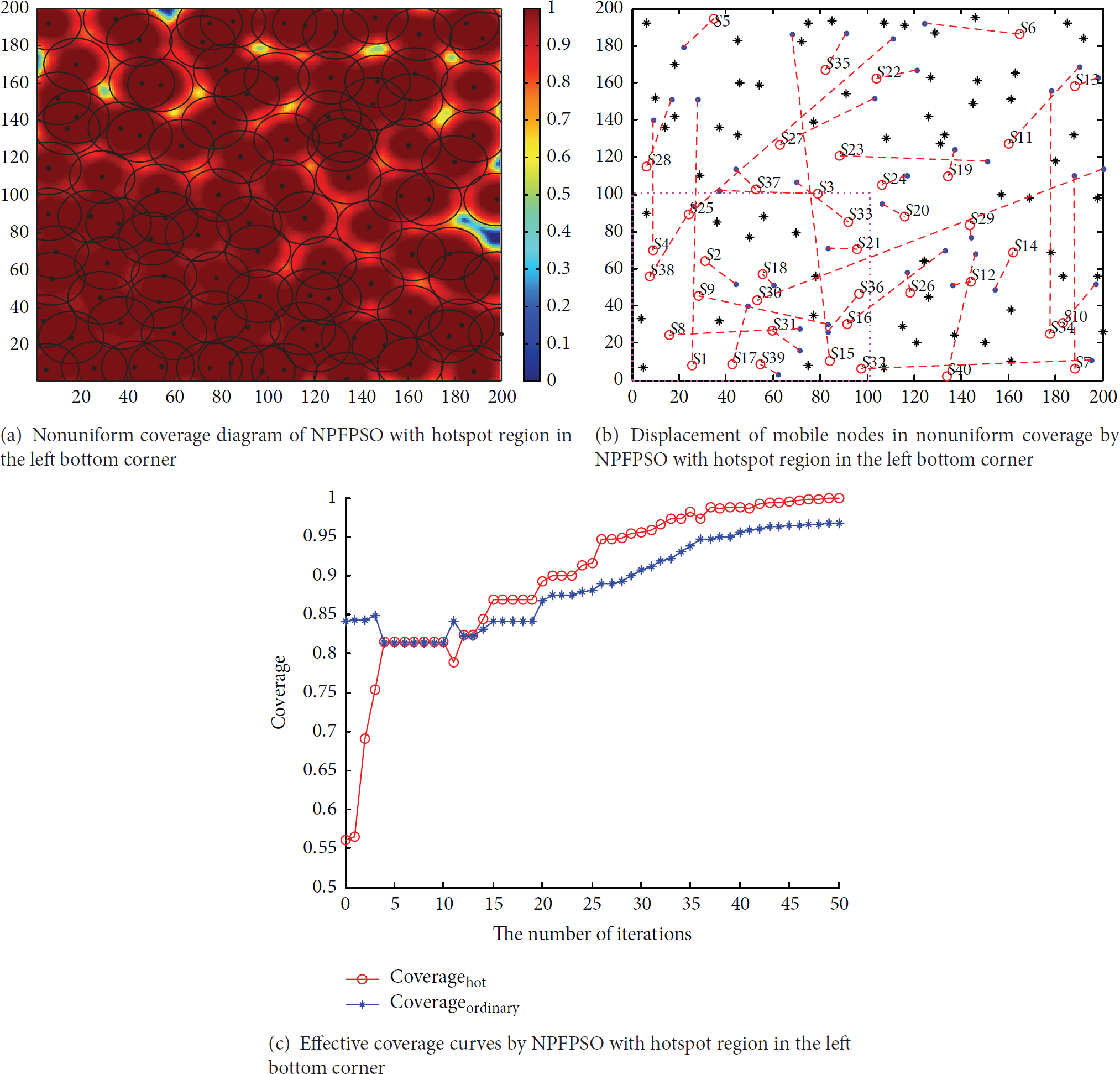
Nonuniform coverage of NPFPSO with hotspot region in the left bottom corner (
As Figure 12(b) is illustrating, with NPFPSO performed, the number of mobile nodes in left bottom dotted frame increases, and the increased number of mobile nodes is 9. The effective coverage rate of hotspot region increases 43.84% compared to its initial state. The red line in Figure 12(c) represents the effective coverage rate of hotspot areas and the blue line represents the effective coverage rate of ordinary area.
A set of Pareto optimal solutions with weight parameter α taking 3 different values is listed in Table 3.
Comparison table of effective coverage with different weight parameter α when hotspot region is in the left bottom of the target area.

Comparing the circumstances above, when the hotspot region is at the left bottom corner, mobile nodes will concentrate more in this hotspot region. Effective coverage of two kinds of regions will all approach a better state while the weight parameter
Since the algorithm presented in the paper is a centralized algorithm, the sensor nodes do not need to move with each iteration of the algorithm. The positions of sensor nodes are only updated at the end of the whole iteration process. So the movement trajectory of a node is nearly a straight line. As a result, compared with the distributed algorithms in which the locations of the nodes will be updated with each iteration, the calculation of energy consumption of sensor nodes here is not so crucial in this case. We just suppose all the mobile nodes have the ability to move to the optimal positions for normal operation within the target area. Regarding the problem of energy efficiency, we had presented other papers to study and analyze it particularly.
8. Conclusion
Deployment algorithm of network is one of the core technologies of wireless sensor networks. Position optimization for mobile nodes can improve the effective coverage rate of hybrid sensor networks. This paper proposed the PFPSO algorithm which improves the typical PSO with the potential field to enhance the convergence speed of optimization, and it can overcome the barrier effect from fixed nodes for the deployment of hybrid sensor networks. The method can drive mobile nodes with dense state to spread to the coverage holes rapidly under the performing of global optimization in the early stage, and then the virtual force generated by potential field can direct the particles updating towards the optimal position. The proposed method can improve the network coverage rate significantly in hybrid sensor networks. On the basis of PFPSO, NPFPSO algorithm was proposed to solve the nonuniform coverage problem by converting the multiobjective optimization problem into a single objective optimization problem. Attractive force generated by potential field can accelerate the convergence speed of the algorithm. The fitness function can be regulated by adjusting the weighting factor α to direct the mobile nodes gathering to the hotspot region. NPFPSO can achieve an optimal result to effective coverage for both hotspot region and ordinary region in hybrid sensor networks.
In more marine realistic situations, the sensor-carried buoys or shallow buoys could be regarded as the fixed detecting nodes, and the AUVs or other boats with sensor-carried could be regarded as the mobile detecting nodes in marine environment. If we just need to gather information for a target region on the sea, and some of the detecting nodes are mobile nodes, the PFPSO algorithm is applicable to be used for optimizing the deployment of the sensor network. However, sometimes we need to do the key monitoring for some key regions. For marine application, we need to emphatically detect the coastal water quality in drain outlet or harbor areas and search and rescue people in some key areas of ocean in which the accidents happen frequently, and also we need to focus on the region with high event occurrence probability in the ocean. For all these circumstances above, the NPFPSO algorithm is suitable to be used for optimizing the effective coverage for hotspot region and ordinary region. Clearly accurate surveillance is required for these hotspot regions and low accuracy surveillance for less focal regions. Anyway, the proposed algorithms could be of more significance to solve these kinds of optimal problems of deployment of sensor networks in practice.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by National Nature Science Foundation of China (no. 61273068), Nature Science Foundation of Shanghai (no. 12ZR1412600), and Scientific Research Innovation Project of Shanghai Education Committee (no. 13YZ084).