
Abstract
We propose two new multisensory fusion predictors for an arbitrary nonlinear function of the state vector in a discrete-time linear dynamic system. Nonlinear function of the state (NFS) represents a nonlinear multivariate functional of state variables, which can indicate useful information of the target system for automatic control. To estimate the NFS using multisensory information, we propose centralized and decentralized predictors. For multivariate polynomial NFS, we propose an effective closed-form computation procedure for the predictor design. For general NFS, the most popular procedure for the predictor design is based on the unscented transformation. We demonstrate the effectiveness and estimation accuracy of the fusion predictors on theoretical and numerical examples in multisensory environment.
1. Introduction
The integration of information from a combination of different types of sensors is often used in the design of high-accuracy control systems. Typical applications that benefit from usage of multiple sensors include industrial tasks, military commands, mobile robot navigation, multitarget tracking, and aircraft. One problem that arises from the use of multiple sensors is that if all local sensors observe the same target, the question then becomes how to effectively combine the corresponding local estimates. Several decentralized fusion architectures have been discussed and algorithms for estimation fusion have been developed in [1–4]. An important practical problem in the above systems and architectures is to find a fusion estimate to combine the information from various local estimates to produce a global (fusion) estimate. Optimal mean square linear fusion formulas, for an arbitrary number of local estimates with matrix and scalar weights, have been reported in [5–10].
However, because of the lack of prior information, in general, the decentralized estimation using the fusion formula is globally suboptimal compared with optimal centralized estimation [11]. Nevertheless, in this case it has advantages of lower computational requirements, efficient communication costs, parallel implementation, and fault-tolerance [11–13]. Therefore, in spite of its limitations, the decentralized estimation has been widely used and is superior to the centralized estimation in real applications. The aforementioned papers [5–13] have not focused on the prediction problem, but most of them have considered only decentralized filtering of state variables in multisensory dynamic models. The decentralized prediction of the state requires special algorithms presented in [14, 15].
Some applications require the estimation fusion of nonlinear function of the state variables, representing useful information for system control, for example, a quadratic form of a state vector, which can be interpreted as a current distance between targets or as the energy of an object [16, 17]. We refer to the nonlinear function as the nonlinear function of the state (NFS). In [17], we have not focused on the prediction of the NFS, considering instead only filtering. To the best of our knowledge, there are no methods reported in the literature for prediction fusion of the NFS in a multisensory environment. Direct generalization of the distributed fusion filtering algorithms to the prediction problem of the NFS is impossible.
Therefore, in this paper, the prediction fusion problem of NFS is considered under a multisensory environment. The primary aim of this paper is to propose centralized and decentralized prediction fusion algorithms and analyze their statistical accuracies.
This paper is organized as follows. Section 2 presents a statement of the prediction fusion problem for NFS. In Section 3, the centralized global optimal predictor is derived. In Section 4, we propose the nonlinear decentralized prediction fusion algorithm for NFS. In Section 5, we propose effective closed-form computational procedure for prediction of multivariate polynomial functions. For prediction of a general NFS, we use the unscented transformation. In Section 6, we study the comparative analysis of the proposed fusion estimators via a theoretical example. In Section 7, the efficiency of the fusion predictors is studied for prediction of the instantaneous impact point of space launch vehicle. Finally, we conclude our results in Section 8.
2. Problem Statement
The general Kalman multisensory framework involves estimation of the state of a discrete-time linear dynamic system:

Assume that L sensors are used to observe the state vector simultaneously. The process noise
Our goal is to find a fused prediction estimate of the NFS at future time

In general, there are two fusion estimation approaches commonly used to process the overall measured data. If a central processor receives measurements
The second approach is called decentralized estimation fusion, in which every local sensor is attached to a local processor. In this approach, the processor estimates the state of a system based on its own local measurements
We propose centralized and decentralized prediction fusion algorithms for NFS in the subsequent sections.
3. Centralized Multisensory Prediction Fusion: Global Optimal Predictor
In this section, the best global optimal (in the mean square error (MSE) sense) prediction algorithm for an NFS is derived. In the centralized fusion setup, a multisensory dynamic system (1) can be reformulated into a composite form:





Next, the global optimal mean square predictor of NFS
Thus, estimate (9) represents the optimal minimum mean square error (MMSE) centralized nonlinear predictor

Remark 1.
There is an alternative idea to estimate the NFS. In this case, the unknown NFS
In decentralized fusion, the fusion center tries to get the best prediction of an NFS with the processed data received from each local sensor

4. Decentralized Multisensory Prediction Fusion
4.1. Local Kalman Predictors for the State Vector
At first, according to (1), we have L unconnected dynamical subsystems

Then, the optimal mean square local prediction estimate


4.2. Local Predictors for Nonlinear Function of the State Vector
Then, the optimal local mean square prediction of NFS

4.3. Multisensory Prediction Fusion Algorithm
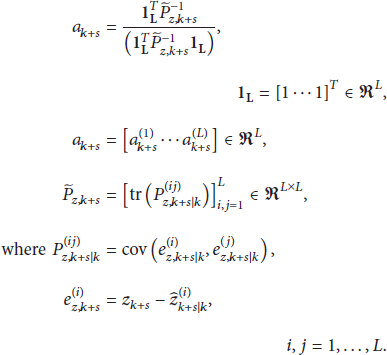
Using all optimal local nonlinear predictors

Remark 2.
Equations (17) and (18) require additional computations of the local cross-covariances

In the following, we discuss effective computational algorithms for the evaluation of local nonlinear predictors
5. Calculation of Fusion Predictor for Nonlinear Functions of the State
5.1. Multivariate Polynomial Functions
First, we consider an arbitrary multivariate polynomial function of the form

Consider an arbitrary quadratic cost function

In a special case of a polynomial NFS (20), the local cross-covariances
5.2. General Nonlinear Function and Unscented Transformation
The unscented transformation (UT) makes it much easier to calculate statistics of the transformed random variable, for example, the mean and covariance [23, 24]. The UT has become a powerful approach for designing new filtering and control algorithms for nonlinear dynamic models [23–26]. Following this, the UT procedure to calculate the best local predictor of an NFS (conditional mean)

Generate the sigma points



5.3. Discussion
The local covariances The implementation of the decentralized predictor consists of two stages: offline and online. The offline stage is more complex than the online stage. This is because it requires the computation of the local covariances
To demonstrate the performance of the proposed centralized and decentralized predictors, they will be evaluated in the next section for the theoretical example originating from [7].
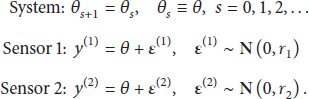
6. Theoretical Comparison of Estimation Accuracy
Consider a simple example of an application of the obtained results. We predict the quadratic function
6.1. Centralized Optimal Estimator for Quadratic Function
In this case,


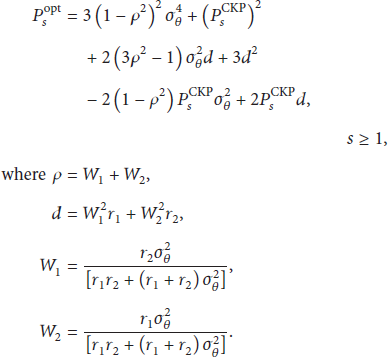
6.2. Decentralized Fusion Estimator for Quadratic Function
The local MMSE estimator


In the second stage, using fusion formula (17), we obtain



6.3. Comparative Analysis of Estimators
The MSE is an important value that can be used to reflect the accuracy of state estimation. Table 1 illustrates the exact values of the MSEs for the centralized
Comparison of MSEs and relative errors.
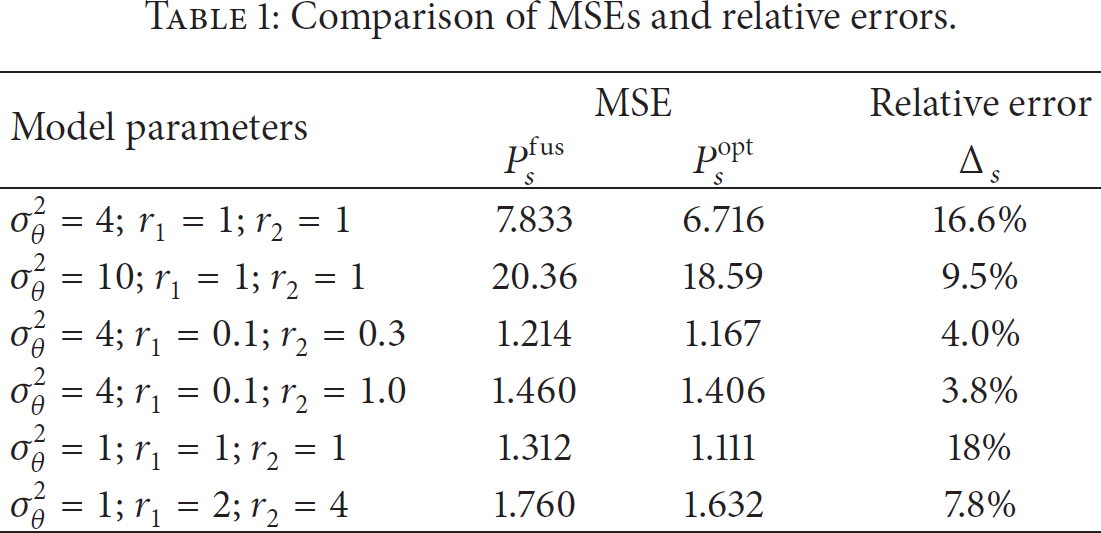
Not surprisingly, Table 1 illustrates that the centralized estimator
7. Experimental Analysis of Fusion Predictors
A comparative experimental analysis of the proposed predictors is considered in an example of the prediction of the instantaneous impact point (IIP) of a space launch vehicle (SLV). In the space rocket launch, a precise and real-time prediction of the IIP plays an important role for the range safety operations. Hence, online IIP prediction is carried out during rocket launch to follow the expected touch down point for a rocket body.
The dynamic model of a SLV, in general, varies from linear model to nonlinear model. Typical nonlinear model considers comprehensive factors such as thrust, gravity, drag coefficient, March number, and air density [27]. Although the nonlinear model precisely describes a motion of SLV, it needs complex prior information concerning a SLV flight environment. In case of the linear dynamic model, on the other hand, a constant acceleration (CA) model with multiple hypotheses which takes advantage of Singer's model [28] is introduced in [29]. In [29], to describe motion of a sounding rocket using the CA model, the rocket motion is separated into two parts, propelled flight and free fall flight phase by utilizing empirically tuned, independent probability density function. This multiple model approach is suitable for the sounding rocket which has relatively short propelled flight phase with large free fall flight phase. In contrast, most of the SLV flight phases fall into the propelled flight. Therefore, for simplicity, we can reduce the dynamic model of the SLV to a CA model. To apply the proposed algorithm for prediction of IIP, a discretized CA model for motion of SLV takes the following form:


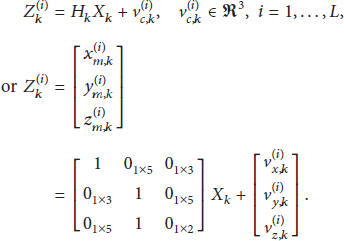
Next radar sensor observes the range (ρ), azimuth (φ), and elevation (θ) of the SLV. In general, due to reliability reason of the SLV, tracking system uses multiple radar to cover large trajectory. Let us assume that L radars simultaneously observe trajectory of the SLV within joint radar coverage. Then, the nonlinear multisensory measurement equations are given by

Using 3D debiased converted measurement form [30], we can transform the original nonlinear equations (39) into linear form as

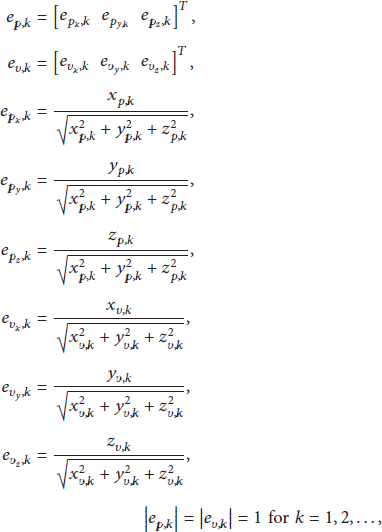
As the unit vectors in (42) represent an NFS, we apply the UT (Section 5.2) to calculate the local predicted estimates 
The SLV model parameters, noise statistics, initial conditions, and prediction lead were taken to


Centralized and decentralized MSEs of fusion predictors for

Centralized and decentralized MSEs of fusion predictors for

Centralized and decentralized MSEs of fusion predictors for

Centralized and decentralized MSEs of fusion predictors for

Centralized and decentralized MSEs of fusion predictors for
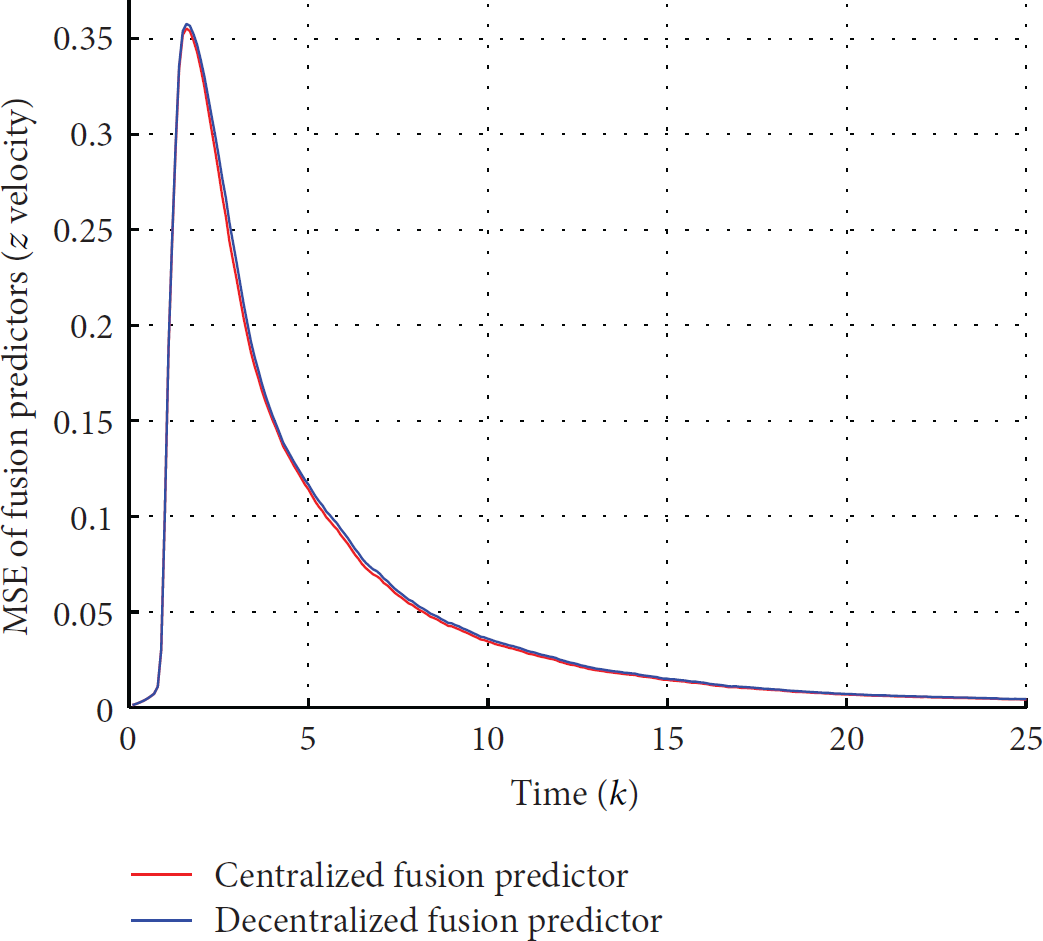
Centralized and decentralized MSEs of fusion predictors for
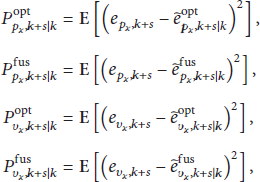
In addition, Figure 7 illustrates the relative errors between the optimal and fusion prediction MSEs:


Relative errors for position components.

Relative errors for velocity components.
Figure 7 shows that the relative errors
8. Conclusion
In some control problems, nonlinear functionals of state variables are interpreted as cost functions, which denote useful information of the target systems for control. To predict an NFS under a multisensory environment, prediction fusion algorithms are proposed and their estimation accuracies are discussed. In general, the centralized fusion algorithm is considered the most accurate. However, owing to the inherent drawbacks of centralized processing, here the decentralized algorithm is found to be the best between fusion prediction algorithms. To show performance of the fusion predictors for NFS by practical application, multisensory fusion prediction of unit vector of position and velocity under constant acceleration motion of SLV is considered. In the example part, the comparative analysis and simulation results show that the proposed decentralized fusion predictor for NFS has competitive performance in an aspect of MSE and relative errors.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.