
Abstract
This paper proposes a channel access control scheme fit to dense acoustic sensor nodes in a sensor network, where multiple acoustic sensor nodes within communication range of a cluster head are grouped into clusters. Acoustic sensor nodes in a cluster detect acoustic signals and convert them into electric signals (packets). Detection by acoustic sensors can be executed periodically or randomly. As a result, each acoustic sensor generates its packets (50 bytes each) periodically or randomly over short time intervals (400 ms~4 seconds) and transmits directly to a cluster head (coordinator node). Our approach proposes using a slotted carrier sense multiple access. All acoustic sensor nodes in a cluster are allocated to time slots and the number of allocated sensor nodes to each time slot is uniform. All sensor nodes allocated to a time slot listen for packet transmission from the beginning of the time slot for a duration proportional to their priority. The order of packet transmissions with the acoustic sensor nodes in the time slot is autonomously adjusted according to the history of packet transmissions in the time slot. In simulations, performances of the proposed scheme are demonstrated by the comparisons with other low rate wireless channel access schemes.
1. Introduction
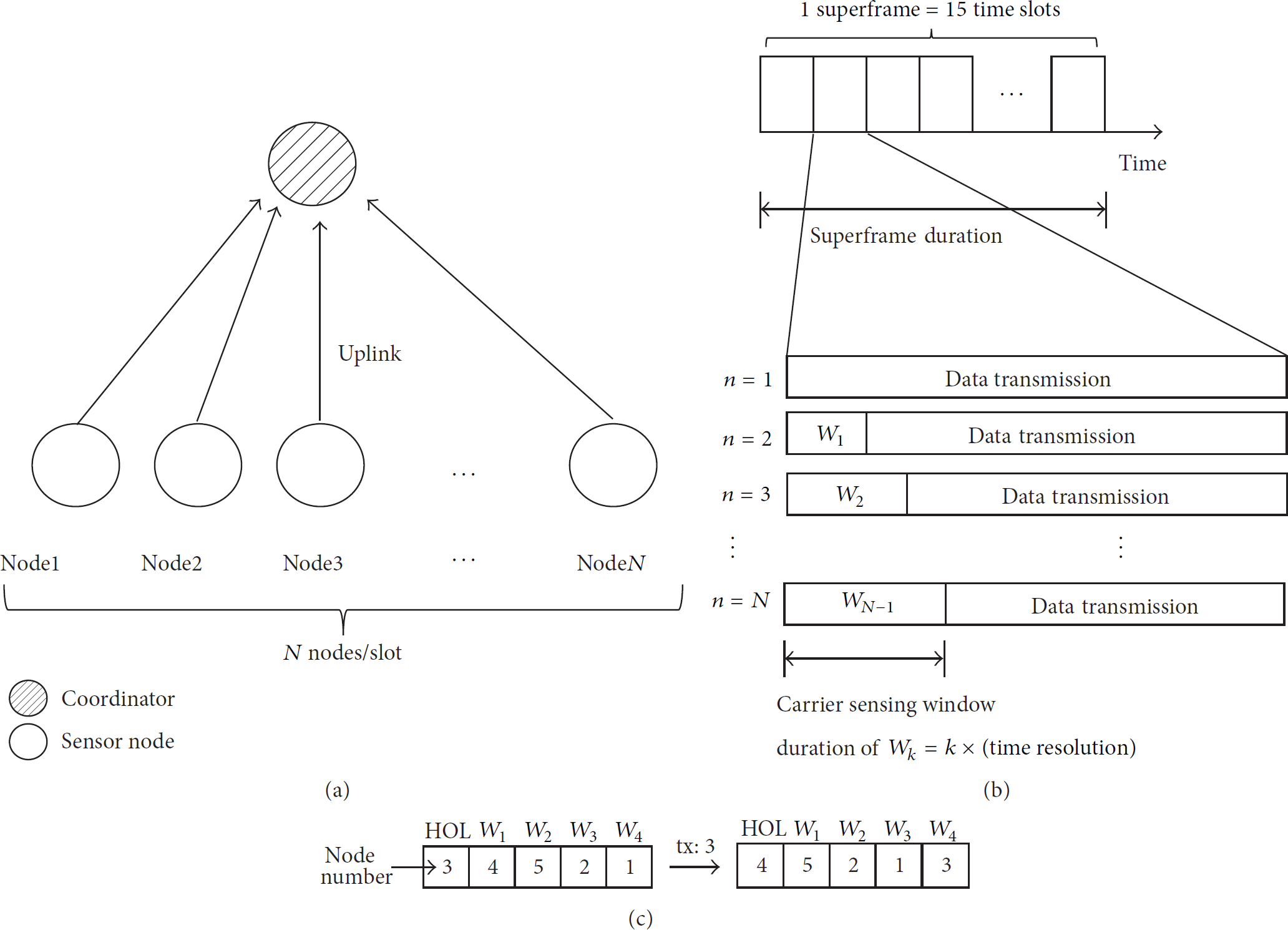
Acoustic sensor networks have been studied for a variety of applications such as hearing aids [1, 2] and acoustic monitoring [3, 4]. Each acoustic sensor node can detect activities of objects or human beings based on acoustic information [5]. Due to distribution of acoustic sensor nodes in a sensor network, efficient in-network information fusion is indispensable [6, 7]. The most typical approach to achieve in-network information fusion with distributed acoustic sensor nodes is to build a hierarchy and the nodes that form a cluster transmit their acoustic (microphone) signal(s) to a higher level node, referred to as a cluster head. Figure 1 shows the information fusion with acoustic sensor nodes in a cluster and Figure 2 presents hierarchical sensor network. In case of hierarchical sensor network, multiple clusters are formed and each cluster carries out distributed in-network information fusion. However, with large number of acoustic sensor nodes within a cluster, information fusion process might lead to a combinatorial problem [8, 9]. In order to mitigate the combinatorial problem, [10] addresses a potential solution. According to [10], each node enhances its own local microphone signal in an optimal way, as if all signals in the entire acoustic sensor network were available to each node. This type of algorithms are referred to as distributed adaptive node-specific signal estimation algorithms. Unfortunately, the optimality of the algorithms relies on the assumption that the total number of desired speakers is much smaller than the number of available microphones.

Typical source coding in a cluster of acoustic sensor nodes: three nodes encode their locally preprocessed signals and transmit it to a fourth node, which decodes all three signals [17].

Clustered acoustic sensor nodes located around the cluster heads.
The acoustic signal is typically converted into electric signal and the digitized electric signal is wirelessly transmitted to the cluster head in the form of electromagnetic propagation. Hence, spectrum sensing for transmission scheduling is required. Deng et al. [11] devised sensor scheduling by grouping the sensors into nondisjoint subsets. A sensor network consisting of clusters with a hierarchical routing protocol in order to increase network lifetime was reported by Huang et al. [12]. They showed, with many sensor nodes, reduction of energy consumption by means of hierarchical routing instead of flat routing.
For efficient operation of networked sensor nodes over certain area, various channel access schemes for different types of network topologies have been studied [13, 14]. Particularly, for low rate data transmission, the channel access schemes such as the IEEE 802.15.4 standard (ZigBee) [15] and the BMAC [16] have been investigated. However, most of the previous channel access schemes require signaling overhead for each channel setup and their performances often depend on traffic conditions. In this paper, an efficient scheme that requires no signaling overhead and works comparatively well with different type of traffic is presented.
Organization of this paper is as follows. Section 2 addresses cluster formation and channel access control schemes. Section 3 gives simulation results to validate the effectiveness of the proposed channel access scheme and Section 4 concludes this paper.
2. System Description
2.1. Cluster Formation
Consider the acoustic sensor nodes located around the cluster heads in Figure 2. The location of each acoustic sensor node is assumed fixed. It is assumed that the cluster head and the sensor nodes in a cluster operate in a time-slotted fashion for timely communication. Depending on geometrical distance between neighbored clusters, frequency reuse pattern among clusters is determined. The acoustic sensor nodes send (report) the sensing results directly to the cluster head and further forwarded to the central station.
For initial clustering purpose, cluster head broadcasts registration (RGT) message which contains the identification number (ID) of the cluster head, its position, and a header field. The purpose of the header field is to differentiate the advertisement message from other types of message or data. The format of the RGT message is given as follows:



Flowchart of clustering process.
2.2. Determination of Cluster Size
It is crucial to determine the number of sensor nodes in a cluster, which ensures the minimum level of sensing performance. Sensing performance can be defined in terms of minimum global detection probability and maximum false alarm probability.
The detection probability of a sensor node is defined as the probability that a sensor node correctly detects the presence of the desired acoustic signal. On the other hand, false alarm probability is defined as the probability that a sensor node incorrectly detects the presence of the desired acoustic signal when the acoustic signal is actually absent. The detection probability





2.3. Channel Access Control for Acoustic Sensor Nodes
Wireless acoustic sensor networks are desired to have energy efficiency, low latency, high throughput, and fairness. In case of low rate wireless sensor networks, many works have been published so far. Among them, IEEE 802.15.4 (ZigBee) and BMAC are popularly adopted due to their attributes being well matched with those required for wireless sensor networks.
2.3.1. IEEE 802.15.4
IEEE 802.15.4 standard specifies the medium access control (MAC) sublayer/PHY layer (physical) of ZigBee [15]. IEEE 802.15.4 standard employs time division multiple access (TDMA) and carrier sense multiple access/collision avoidance (CSMA/CA). IEEE 802.15.4 complying system can be operated in beacon mode and nonbeacon mode. In beacon mode, sensor nodes are synchronized by beacon signal which is transmitted by coordinator node, for example, cluster head. Superframe interval is directly defined by beacon interval. The beacon interval is categorized into active portion and inactive portion. In the inactive portion, power consumption is minimized by turning off the cluster head and the transceiver of each sensor node. The active portion is divided into contention access period (CAP) and contention-free period (CFP). The number of time slots in active portion is limited up to 15. Maximum number of time slots in CFP is limited to 7. In CAP, each node transmits information by CSMA/CA method where nodes access the common channel by carrier sensing. In CFP, the cluster head arranges the order of transmission and allocates number of time slots for sensor nodes. While IEEE 802.15.4 standard leads to high energy efficiency, most sensor nodes have to compete for channel access due to limited number of time slots for CFP.
2.3.2. Berkeley MAC (BMAC)
BMAC is a contention based MAC protocol which is widely used in sensor networks. The BMAC is like the Aloha protocol with preamble sampling and the BMAC duty cycle determines the operation pattern of the radio transceiver [21]. The preamble length is provided as a parameter to the upper layer and it determines an optimal trade-off between energy savings and latency. Figure 4 shows the preamble sampling of the BMAC. The BMAC is also similar to CSMA from the perspective of low power consumption. Unsynchronized duty cycling and long preambles are used in the BMAC to wake up receivers. Filter mechanism of the BMAC increases reliability and channel assessment. The sensor node operating with the BMAC can change operating variables such as back-off values. The BMAC also adopts an adaptive preamble sampling scheme which can minimize idle listening and reduce duty cycle. The clear channel assessment (CCA) technique is used by the BMAC to decide if a packet is arriving when the sensor node wakes up. If no packet arrived, timeout puts node back to sleep. The CCA and packet bake-offs are used by the BMAC for channel arbitration and link layer acknowledgments for reliability. There are no synchronization, RTS, and CTS adopted in BMAC.

Preamble sampling in BMAC.
2.3.3. Proposed Channel Control Scheme
Proposed channel control scheme achieves time synchronization between sensor nodes and cluster head by the beacon signal which is also used for such purpose by IEEE 802.15.4 complying systems. Sensor nodes are uniformly allocated to each time slot. One feature of the proposed channel control scheme is that queueing of sensor nodes allocated to each time slot is managed by sensor nodes themselves rather than the cluster head.
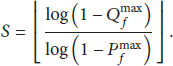
Consider the uplink packet transmission in Figure 5(a). N nodes are allocated to each time slot and 15 time slots are in each repeated superframe. In a time slot, (
Proposed channel control scheme for the acoustic sensor nodes in a cluster: (a) system model; (b) carrier sensing windows; and (c) queue operation. Coordinator corresponds to cluster head.
Queue operation of the proposed scheduling in Figure 5(c) can be explained in conjunction with Figure 5(b). In Figure 5(c) with 5 nodes, the 3rd node is in the Head Of Line (HOL) position for immediate transmission. If it has a packet to transmit from the beginning of the time slot, it transmits the packet and takes the last position of the queue. Positions of the other nodes in the queue are shifted by one toward the HOL position. If the 3rd node has no packet to transmit, it remains at the same position and the 4th node that sensed the channel over the time duration of
3. Simulations for Performance Comparisons
In this section, simulation results of the proposed scheme, IEEE 802.15.4, and the BMAC are presented. Comparisons are made in terms of average delay per packet and average energy consumption per packet.
Simulation parameters are shown in Table 1. Number of time slots and the superframe duration for IEEE 802.15.4 and the proposed scheme are 15 and 120 ms, respectively. For the purpose of comparison, 15 slots for the IEEE 802.15.4 are dedicated to contention-free access. The smallest window duration
Common simulation parameters.

Figure 6 shows average delay per packet and average energy consumption per packet. In case of the IEEE 802.15.4 and the proposed scheme, total nodes pertinent to the horizontal axes of Figure 6 are equally divided over 15 slots. Delay and energy consumption are measured from the generation to the end of transmission. Aggregate packet traffic of the nodes is adjusted so that channel utilization is less than 1. Numbers on horizontal axes in Figure 6 match with the numbers in Table 1. For example, the 2 : 1 with 9 nodes per slot (9 nodes/slot ∗ 15 slots = 135 nodes = 3rd entry on axis) indicates that 6 nodes generate packets in fixed interval 1200 ms (3rd entry of fixed interval) and 3 nodes generate packets randomly over 3000 ms interval (3rd entry of random generation). When it is 2 : 1 data traffic, performances of the considered schemes allow us to predict the performances of all the schemes with purely periodic traffic. Also, with 1 : 2 data traffic, the performances of the considered schemes with purely random traffic can be estimated. As seen in Figure 6, the proposed scheme with autonomous queue operation is superior to the IEEE 802.15.4 based scheme and the BMAC scheme. Disparity of performance is getting more outstanding as the number of nodes increases. Average energy consumption in Figure 6(b) seems proportional to average packet delay in Figure 6(a). Interestingly, the proposed scheme works significantly better with random traffic dominant in aggregate traffic, whereas no such differentiation between types of packet traffic is observed with the IEEE 802.15.4 based scheme and the BMAC scheme. From the simulation results, carrier sensing in in-slot windows is effective for reduction of average packet delay and average energy consumption.

Comparison of performance measures: (a) average delay per packet versus number of nodes per time slot; (b) energy consumption per packet versus number of nodes per time slot; and (c) average delay per packet versus packet traffic.
It is noted that the proposed scheme can be extended for hierarchical wireless network with multiple levels. A mother node in upper level of hierarchy having multiple child nodes can take the role of coordinator node and each child node in lower level attempts to transmit data following the order of data transmission.
4. Conclusion
This paper proposes a channel access control scheme fit to dense acoustic sensor nodes in a sensor network. Multiple acoustic sensor nodes are grouped into clusters and the acoustic sensor nodes of each cluster transmit detected information to the cluster head. Detection by acoustic sensors can be executed periodically or randomly and random detection by acoustic sensors is event driven. Our approach is based on a slotted carrier sense multiple access. All acoustic sensor nodes allocated to a time slot listen for packet transmission from the beginning of each slot for a duration proportional to their priority and transmit detected information to the cluster head. The order of packet transmissions with the acoustic sensor nodes in the time slot is autonomously adjusted according to the history of packet transmissions in the time slot. By simulations, superior performances of the proposed scheme in terms of transmission delay and average energy consumption are demonstrated by the comparisons with other low rate wireless channel access schemes.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by Ministry of Land, Infrastructure, and Transport (MOLIT) as Railroad Specialized Graduate School.