
Abstract
A vehicular ad hoc network (VANET) could deliver safety-related messages reliably within a short time to increase road safety. Since safety-related messages should be sent to a set of unspecified receivers, they are delivered by broadcast method. However, the broadcast method specified in the IEEE 802.11p does not have a collision avoidance procedure and receivers do not acknowledge when they receive a broadcast frame. In addition, frames could be lost and corrupted. Therefore, as the portion of nodes that do not receive a broadcast frame increases, the effectiveness of a safety application decreases. To tackle the problem, we propose a reliable and swift message broadcast method (RSMB). In RSMB, to expedite message dissemination process, a relay node is selected in a distributed manner considering the progress made to a frame and the delay requirements of an application. In addition, a relay node broadcasts a message multiple times to assure that the probability that the other nodes successfully receive the message at least once is larger than a given threshold value. Since the number of rebroadcasts is regulated based on the successful message reception probability, the additional bandwidth needed to increase the reliability of broadcast is reasonably small.
1. Introduction
Vehicular ad hoc network (VANET) has drawn attention as a key technology to provide road safety, comfort, and commercial applications. VANET is also expected to leverage the intelligent transport system.
Recognizing the potential of VANET, FCC licensed 5.9 GHz frequency band for the dedicated short range communication (DSRC), which is divided into seven 10 MHz channels and 5 MHz guard bands. On the other hand, IEEE 802.11p task group is formed to develop a standard for VANET, which is called the wireless access in vehicular environment (WAVE). The group has been specifying the MAC protocol by modifying the enhanced distributed channel access (EDCA) of IEEE 802.11e. In the specification, one control channel (CCH) and six service channels (SCHs) are defined. For each type of channel, four access classes are defined. Safety applications use the CCH while the other applications use one of the SCHs. To provide both the safety applications and other applications cost effectively, the CCH and the SCHs are switched alternately at every synchronization interval of 100 ms. Since all nodes must tune to the CCH during the CCH interval, safety-related and system control data could be exchanged among them. After 5 ms of guard band, the nodes switch to one of the SCHs they are subscribed to.
Safety application is one of the most important target applications of VANET. Safety applications require that safety-related messages should be disseminated through a certain area within a very short time and received by all the vehicles vulnerable to traffic accidents [1]. Since the application requirement is tight, if the communication method is not engineered carefully, the effectiveness of safety applications may decrease. Broadcasting is used to deliver safety-related messages to many unspecified vehicles. In addition, the distance from the message originator to the point where safety-related messages should be delivered is longer than the transmission radius of a wireless communication interface, they should be delivered among the vehicles in a multihop fashion.
However, in IEEE 802.11p, receivers do not send acknowledgement for the broadcasted packets. Therefore, it is not guaranteed that safety-related messages are received by the relevant vehicles. Moreover since a message is sent by multiple relays, the message dissemination delay could increase. Therefore, to support the service requirements of a safety application, an efficient relay selection method is required that considers the required message delivery time and the message reception reliability.
In [2], a geocast is proposed for message routing in VANET. Geocast is composed of a forwarding phase and a diffusion phase. In the forwarding phase, a message is delivered to a certain area. In the diffusion phase, a message is sent to all the nodes in the area. However, geocast is mainly focused on the relay selection method in the forwarding phase while simple flooding is used in the diffusion phase. Since each vehicle rebroadcasts once when it receives a message, so-called broadcast storm problem may occur to waste communication bandwidth and fail a safety application [3].
A fast relay method is proposed in [4–6] to avoid the broadcast storm problem. Among the vehicles receiving a message from the current relay, the fast relay selects the vehicle that is farthest away from the current relay as the next relay. The fast relay could reduce the number of broadcast messages by forcing the vehicles residing between the current relay and the next relay not to rebroadcast the message. In addition, since the farthest vehicle from the current relay is selected as the next relay, the message could be delivered fast.
However, they do not consider the message reception probability when the current relay broadcasts the message. In IEEE 802.11p, a sender broadcasting a message could not be convinced whether or not all of its neighbor nodes received the message because there is neither RTS/CTS frame exchange nor ACK issued by a receiver. On the other hand, the measurement studies for the VANET channels show that the received signal strength varies widely at all distances [7, 8]. Therefore, if the portion of vehicles that reside between the current relay and the next relay and do not receive a safety-related message increases, the effectiveness of a safety application deteriorates seriously.
In this paper, we propose a reliable and swift message broadcasting (RSMB) method for safety applications in VANET. RSMB is designed based on the successful message reception probability and is composed of two stages. In the first stage, to expedite a message delivery, the next relay of a message is selected in a way that could make the farthest progress to the message. The relay selection process operates in a distributed manner considering the location of vehicles and the requirement on the dissemination delay of the message from the message originator to a given effective distance. The selected relay broadcasts the received message multiple times to increase the probability that the vehicles located between the previous relay and itself successfully receive the message at least once to a given threshold level. RSMB avoids the broadcast storm problem by preventing the vehicles that are not selected as a relay from rebroadcasting a message. However, since RSMB makes a relay to broadcast a message multiple times, network bandwidth may be wasted if the number of broadcast messages increases excessively large with the number of vehicles. Since RSMB uses the successful message reception probability, the number of message broadcasts by a relay does not increase with the density of vehicles. In addition, since RSMB operates in a distributed manner, RSMB is scalable and adaptive to rapid network topology change.
The rest of the paper is organized as follows. In Section 2, we review the related works. We describe our reliable and swift broadcast method for VANET in Section 3 where we also provide an analytical framework for the message reception probability. In Section 4, we discuss the simulation results. Section 5 concludes the paper.
2. Related Works
In the broadcasting methods of the IEEE 802.11p standard, all nodes have the same priority to relay messages. It leads to serious redundancy, contention, and collision to a large number of nodes trying to resend the packet to their neighbors at the same time. To solve the problem, many broadcast methods for message dissemination in VANETs have been proposed in the literature.
In the modified MAC approach, the backoff mechanism of IEEE 802.11p standard is improved to adjust the backoff window sizes. In [9], it is addressed that the backoff window sizes are not adaptive to the dynamics of the numbers of nodes. Thus, two algorithms are proposed which need exact information about the number of concurrent communicating nodes to calculate the optimal window size. In [10], authors also address the backoff mechanism of the standard. In the standard, each node uniformly chooses its backoff time in every backoff stage. In this way, fairness among all the nodes is guaranteed. However, this backoff mechanism ignores the propagation distance. It means that the farthest node does not have the higher priority to relay. In the proposed algorithm, the lengths of the backoff times are generated from a nonuniform distribution. They are related with the distances between the sender and the receivers.
Even though the modified MAC approach is efficient to relay messages, it needs to improve the standard MAC protocol. Thus, another approach is proposed to disseminate messages without the modification of the standard. In the distance-based approach, the farthest node is chosen as the relay node. The farthest node offers maximum coverage as a result of which the number of hops is reduced. Thus, it reduces the end-to-end delay.
In normal distance-based approach, the sender transmits the broadcasting message, and the receivers then wait to propagate it within each waiting time. The waiting time is shorter for more distant receivers. When one of the receivers transmits the received message, other nodes do not propagate the same message and discard it [11]. In the urban multihop broadcast (UMB) [12], to select the farthest node as the relay node, the area inside the transmission range is divided into a certain number of segments of equal width. The nodes in all segments choose black-burst lengths proportional to the distance of their segment from the sender with the farthest segment having the longest black-burst duration. On completion of the black burst, the node replies to the sender. Then, the sender transmits the broadcast packet. In the smart broadcast (SB) [5], the similar segment-based approach is used. It differs from UMB in a way that each segment is assigned a fixed-size contention window. On receiving request from the sender, nodes randomly choose a backoff time from the window allocated to their segment. The backoff times in a contention window increase as approaching toward the sender. Thus, a node in the farthest segment times out first and is chosen as the relay node. In [13], it addresses the latency issue in the segment-based approach. It uses a binary-partition-based approach to iteratively partition the area inside the transmission range to produce the farthest narrow segment. Then, a node in that segment is chosen at random as the relay node. Black burst is used to select a potential segment and eliminate the nonpotential segment from further consideration.
3. Data Dissemination Method
In this section, we describe a reliable and swift message broadcast method in a VANET. The proposed method is composed of two distinct steps. First, a relay node is selected in a distributed manner. Then, the elected relay node broadcasts a message repeatedly to guarantee that the probability that nodes located between the previous relay node and the current relay node successfully receive a message at least once becomes higher than a given threshold value.
3.1. System Model
We consider a scenario that a safety-related message originated from a node O is disseminated an effective distance

Safety message dissemination in VANET.
3.2. Relay Node Selection
A relay node is selected in a distributed manner. When a node i receives a message, i checks whether it receives the message for the first time or not by checking the identifier of the message originator O and the sequence number contained in the message. If i received the message for the first time, i examines the location of the current relay node C. If the current relay node is farther away from O than the node i, i does not participate in the relay node selection process. On the other hand, if
To expedite the message dissemination process, the next relay node should be the one that makes the farthest progress to the message. Thus, the wait time is inversely proportional to the distance between C and i. The parameter
The message transmission delay from a node to its neighbor is the sum of the message propagation delay (
When a node i receives the same message before its wait timer expires, it checks the location of the message sender j. If i is closer to O than j, i abandons the competition because the message passed it. On the other hand, if
Since the broadcast in IEEE 802.11 MAC does not have collision avoidance procedure, a message broadcasted by i may not be received by its neighbor nodes. In addition, since the wireless channel fluctuates widely at all distances, a node within a transmission range of i may not receive the message even if it is close to i. To increase the message reception probability to
3.3. Reliable Broadcast
Each node manages its message reception probability. Since a message should travel fast, we assume that a network topology does not change during the time between when O sends the message and the time it traveled the effective distance. For example, if a node moves 120 km/h, it could move 3.3 m approximately during 100 ms.
In a road, the radio propagation environment of a relay node is usually similar to those of its neighbors. In addition, the number of neighboring nodes of a relay node i is similar to that of i's neighbors. Thus, we approximate the message reception probabilities of i's neighboring nodes as that of a relay node i. We denote the message reception probability of a relay node by

3.4. Message Reception Probability
A node may not receive a message sent by a relay node if a collision occurs at a MAC layer or the received signal strength of the message is below a given threshold value. Since these two factors are independent of each other, we derive the message reception probability at each layer independently.
(1) MAC Layer. There can be two types of collision when a message is broadcasted. A synchronous collision occurs when at least one of the neighboring nodes of a relay node sends a frame while the relay node broadcasts a message. On the other hand, an asynchronous collision occurs when a hidden node of a relay node transmits while the relay node is transmitting a message.
Let us denote n as the number of neighboring nodes of a relay node R. We also denote
If the average message size is M and the average transmission rate of a node is C, the frame transmission time becomes
We take a geographic approach to calculate the asynchronous collision probability. In Figure 2, the relay node

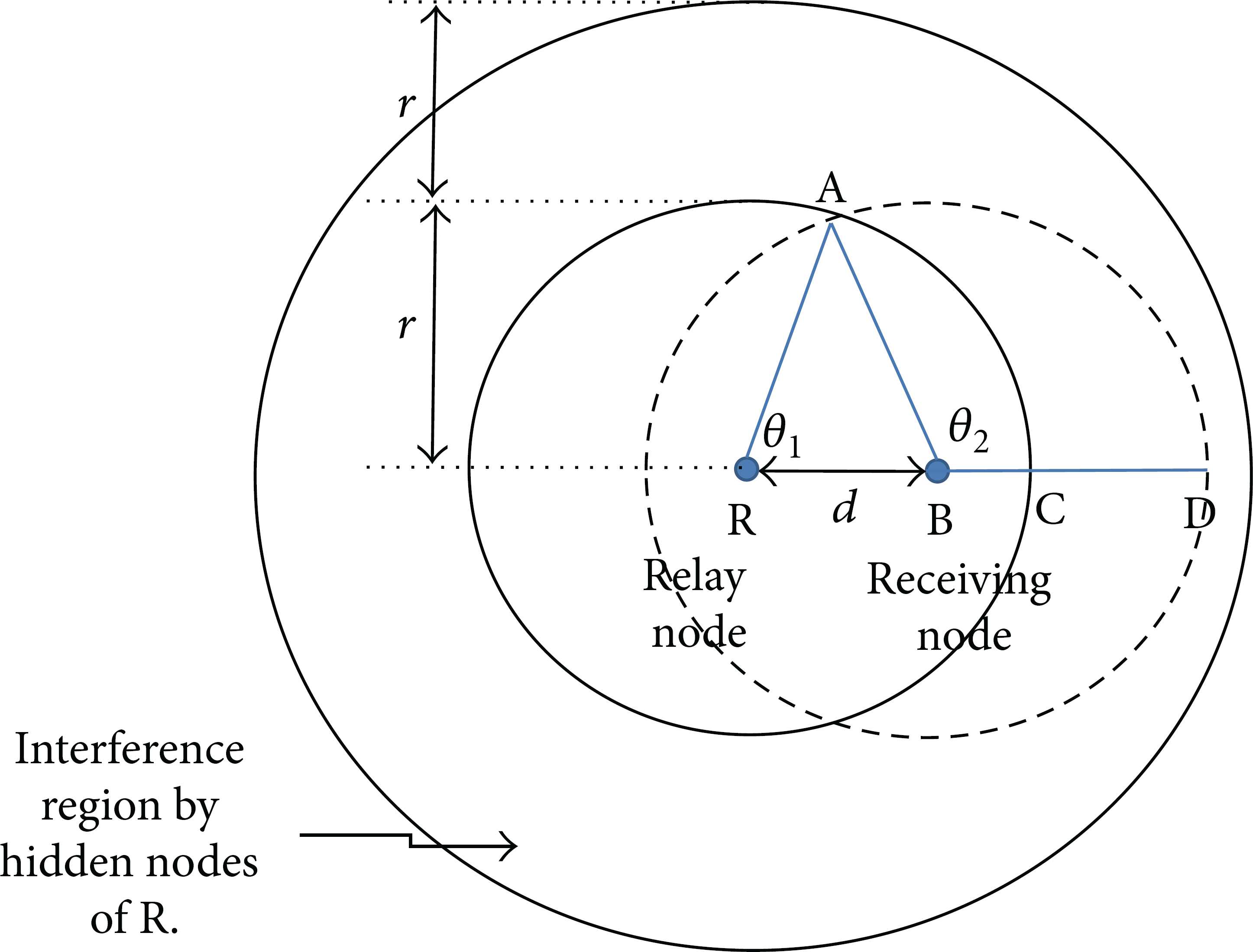
Interference region of the current relay node.
Since

We denote the number of nodes in the interference area of the node

To receive a message from a relay node successfully, both the synchronous collision and the asynchronous collision should not occur. Therefore, if the distance between a relay node and its neighboring node is d, the probability of receiving a message from a relay node without MAC layer collision becomes

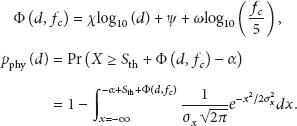
(2) PHY Layer. The frame reception probability at a physical layer depends on the channel characteristics. We adopt the channel model proposed by WINNER (Wireless World Initiative New Radio) project to analyze the frame reception probability at a physical layer. The WINNER channel model can be applied to 2~6 GHz frequency bands. If the distance between a sender and a receiver is d, the path loss is modeled as [15]

According to the WINNER model, the signal power at a receiver that is d away from a sender is obtained as

Denote

4. Performance Analysis
4.1. Numerical Results
We evaluate the broadcast message reception probability according to IEEE 802.11p system parameters (such as transmission range, data rate, minimum contention window, and time slot) and the network operating environments (such as radio propagation environment and node density). IEEE 802.11p standard uses channels of 10 MHz bandwidth in the 5.9 GHz band. We assume a 10 MHz control channel (CCH) operating at a data rate of 6 Mbps. The slot time is 16 μs and the frame size is set to 200 bytes. The transmission power is set to 20 mW such that the receiving power at the communication range, that is, 300 m, is the same or greater than the received power threshold. The number of nodes in the transmission range of a sender is set to 100. The message transmission probability of a node at the beginning of each time slot
Figures 3 and 4 show the broadcast message reception probability according to the distance between a sender and a receiver. In Figure 3, we assume the urban macrocell line of sight (LOS) with

Broadcast message reception probability according to the distance from a sender in the good radio propagation environment.
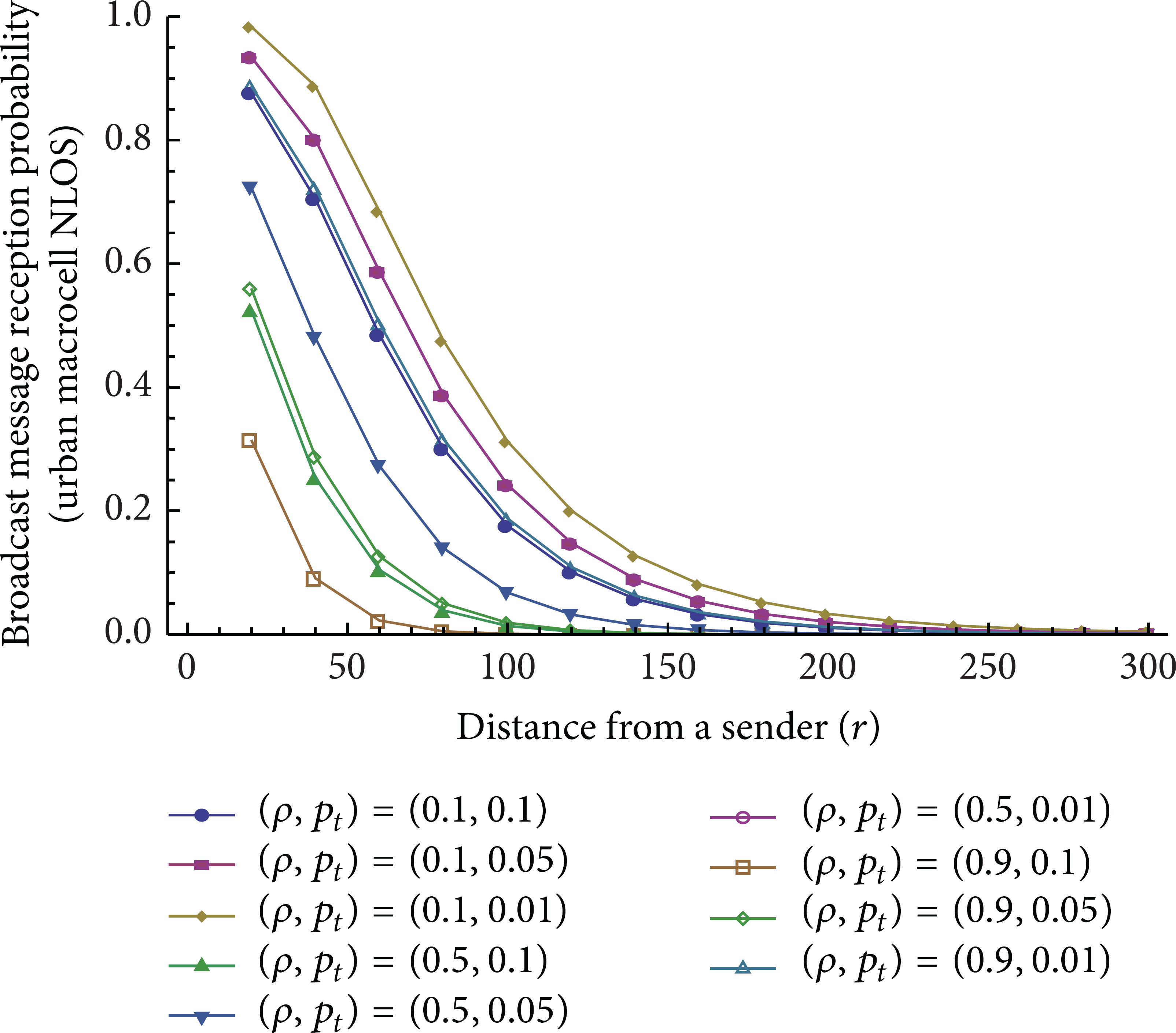
Broadcast message reception probability according to the distance from a sender in the poor radio propagation environment.
In Figures 5 and 6, the effect of the broadcast message reception probability at the MAC and PHY layer on the total broadcast message reception probability is analyzed, respectively. In Figure 5, we assume the urban macrocell LOS. As shown in the figure, at the MAC layer,

Broadcast message reception probability at the MAC layer according to the distance from a sender.

Broadcast message reception probability at the PHY layer according to the distance from a sender.
As a result, the broadcast message reception probability of nodes in the transmission range of a sender depends on
4.2. Experimental Results
We evaluate RSMB based on the message delivery ratio and the number of transmitted messages. The message delivery ratio is defined as the ratio of the number of receiving nodes to the total number of nodes in the effective area. The safety message propagates to the effective distance (
Figures 7 and 8 show the message delivery ratio in two propagation environments. We assume the urban macrocell LOS and NLOS in Figures 7 and 8, respectively. In the figures, “farthest node” indicates the conventional distance-based scheme. We vary the message transmission probability of a node at the beginning of each time slot,

Message delivery ratio in the good environment.

Message delivery ratio in the poor environment.
Figures 9 and 10 show the number of the transmitted messages which is divided by the number of nodes in the effective area. Because each relay node broadcasts the message once, the number of the transmitted messages of the conventional scheme is lower than that of RSMB. In RSMB, when
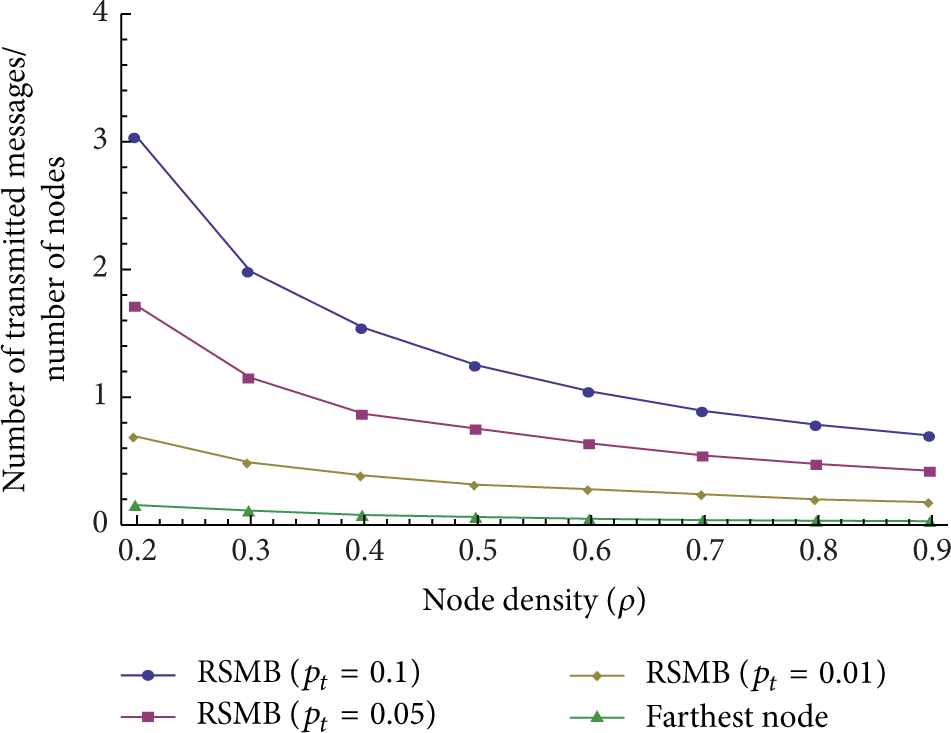
The number of the transmitted messages in the good environment.

The number of the transmitted messages in the poor environment.
5. Conclusion
In this paper, we propose a reliable and swift message broadcasting (RSMB) method for safety applications in VANET. RSMB is designed based on the successful message reception probability. To expedite a message delivery, the next relay of a message is selected in a way that could make the farthest progress to the message. The selected relay broadcasts the received message multiple times to increase the probability that the vehicles located between the previous relay and itself successfully receive the message at least once. Through performance analysis, we show that the message delivery ratio of RSMB is over 93% in various node densities. In addition, the increase in the number of broadcast messages is marginal with the number of vehicles in the network because RSMB determines the number of message broadcast with the probability of successful message reception.
For the future work, we plan to evaluate the performance RSMB in various real scenarios.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the GRRC program of Gyeonggi province ((GRRCSUWON2014-B3), Development of Cloud Computing-based Intelligent Video Security Surveillance System with Active Tracking Technology). This work is supported by Basic Science Research Program through the National Research Foundation of Korea funded by the Ministry of Education, Science and Technology (NRF-2011-0007076 (2014010024)).