
Abstract
Cognitive radio (CR) networks have been active area of research because of its ability to opportunistically share the spectrum. A cluster-based cooperative spectrum sensing (CCSS) has a tremendous impact on sensing reliability compared with cooperative spectrum sensing. The energy detection (ED) technique requires perfect knowledge of noise power. An eigenvalue-based spectrum sensing has mitigated the noise uncertainty problem. Sensing and reporting time slots are rigidly separated in the conventional ED and eigenvalue-based detection (EVD) schemes. In CCSS, more reporting time slots are required as the number of CR users (CRUs) increases. If the reporting time slots of other CRUs as sensing time slots with a superposition allocation, the more reliable channel sensing can be achieved. In this paper, we propose CCSS using EVD technique with a superposition approach scheme where the reporting time slot is properly utilized to sense the primary user's (PU's) signal more accurately by rescheduling the reporting time slot for CRUs and cluster heads (CHs). Simulation result shows that the proposed EVD scheme has better detection probability than the conventional CCSS using both ED and EVD techniques.
1. Introduction
CR [1, 2] as a revolutionary intelligent technology can maximize the utilization of the frequency resources by allowing CRUs to access the spectrum bands allocated to PU when they are idle temporally. This technology can enable CRU to opportunistically access an unused portion of the licensed bands. CR technologies can be categorized into the following two approaches [3, 4]: (i) the overlay approach, where the CRUs identify an unused portion of the licensed bands through the spectrum sensing process and opportunistically access the available spectrum for data transmission; (ii) the underlay approach, in which the communication of the CRUs with very low transmit power coexists with that of the PUs in the same channel, and the CRUs avoid interfacing with the communication of the PUs.
An ED scheme can be used by single CRU for finding idle spectrum. However, it cannot deal with the hidden terminal problem [5] which arises due to multipath fading and shadow effects and results in performance degradation. Recently, cooperative spectrum sensing schemes were proposed to overcome the hidden terminal problem in single node sensing [6–8]. To implement the conventional cooperative spectrum sensing methods, each CRU makes a local decision and its decision is reported to a fusion center (FC) to make a final decision according to some fusion rules. These fusion rules can be classified as hard decision fusion (HDF) [7, 8] or soft decision fusion (SDF) [9, 10]. In HDF, a local CRU makes its own decision on the presence of PU and its corresponding resultant 1-bit decision is forwarded to the FC for fusion. Therefore, the traffic overhead is reduced because only single bit is reported to the FC from each CRU. On the other hand, in the SDF scheme, each CRU reports their measurements as raw data to the FC and these types of data will be fused to construct a final decision on the existence of the PU's signal. The SDF scheme shows better detection performance than the HDF scheme. However, more reporting data are required for each CRU to report its local decision to FC as the number of cooperative CRU's increases.
An alternative way to improve the sensing performance is to group the CRUs into clusters and send their 1-bit hard decisions to CHs which will then forward their judgement to the FC [11–13]. These methods based on clustering work well even when reporting channels experience Rayleigh fading and shadowing effects.
There are several spectrum sensing techniques, including ED, matched filter detection, and cyclostationary detection [14, 15]. The ED has lower complexity and is widely used as a signal detection method in practical systems. However, ED relies on knowledge of noise power, and the inaccurate estimation of the noise power will lead to high probability of false alarm as well as misdetection. Thus, ED is vulnerable to the noise uncertainty. Moreover, ED is not optimal for real environment due to the fact that the received signals from PU for different time are correlated. Matched filter is known as the optimum method for detection of the primary users when the transmitted signal is known to receivers. The main advantage of the matched filtering is that it takes short time to achieve the spectrum sensing performance under a certain value of the probabilities of false alarm and misdetection, compared to the other methods. However, it requires the perfect knowledge of the PU's signaling features such as bandwidth, operating frequency, the modulation type and order, pulse shaping, and the packet format. Cyclostationary detection has good performance but requires partial knowledge of the PU's signal such as properties of cyclic frequencies.
Recently, many papers have investigated the application of eigenvalue-based cooperative spectrum sensing which outperforms the ED techniques [16–19]. In eigenvalue-based cooperative spectrum sensing, covariance matrix of the received signal was used for spectrum detection. In [20, 21], Ratnarajah et al. performed asymptotic analysis of exact decision thresholds for maximum eigenvalue detector (MED) and maximum-minimum eigenvalue (MME) detector. They also pointed out that MED has better spectrum detection probability.
Both conventional ED and EVD schemes cannot achieve reliable sensing performance with a longer sensing time slot. In this paper, we propose a CCSS in CRN using EVD with a superposition approach scheme. By rescheduling the reporting time slots, a longer sensing time can be obtained and better sensing performance can also be achieved. We investigate how to achieve better detection performance within an extended sensing time slot when a superposition approach [22] is applied to the conventional EVD scheme [19]. In the proposed EVD scheme, each CRU will utilize other CRUs reporting time and CHs reporting time by rescheduling them. In this scheme, we can easily achieve the reliable sensing performance because CRU reporting time and CH reporting time merge to a sensing duration to detect the PU's signal more accurately without decreasing system throughput.
The remainder of the paper is structured as follows. In Section 2, we introduce the cognitive radio network system model: firstly, the characterization of primary user-cognitive radio user (PU-CRU) link and, secondly, the characterization of cognitive radio user-cluster header (CRU-CH) link. In this section, we explain the conventional ED scheme, the conventional EVD scheme, and the proposed EVD scheme. Finally, the characterization of cluster header-fusion center (CH-FC) link is explained. In Section 3, simulation results are shown, and conclusion of the paper is drawn in Section 4. Additionally, parameters used in this paper are summarized as follows.
Parameters and Their Definition Are as Follows:
K: the number of clusters. M: the number of CRUs in each cluster.
2. Cognitive Radio Network System Model
In CRN, the detection performance of PU signal might be degraded when the sensing decisions are forwarded to FC through fading channels. Figure 1 shows the CRN deployment where M CRUs are grouped into a cluster governed by a CH based on low energy adaptive clustering hierarchy-centralized (LEACH-C) protocol [23] and the K CHs of the K clusters report their decisions to FC through a common control channel. Here, HDF will be applied to obtain a final decision on the presence of the PU activities. The process of LEACH-C protocol is made up of rounds, and each round consists of two phases: a setup phase when the CHs and clusters are organized and a steady state phase when the cluster members begin to send their measurements to CH and CHs send their decision to the FC. In setup phase, each CRU sends information about its current location and SNR of reporting channel to the FC. Based on this information, the FC determines CHs among all CRUs, while the remaining CRUs will act as cluster members. After the CHs are determined, the FC broadcasts a message that contains not only the CH ID for each CRU but also the information of time synchronization. If CRU's CH ID matches its own ID, the CRU is a CH; otherwise, the CRU is a cluster member and goes to sleep. In steady state phase, the CRUs start to forward the measurement of the received PU's signal to the CH, and then the CH collects the measurements from the cluster members and makes the cluster decision about the presence of the PU and sends it to the FC during their allocated reporting time slots. Afterword, the FC combines the received clustering decision to make the final decision and then broadcasts it back to all CHs and the CHs send it to their cluster members. Figure 1 shows the general deployment of the CRN with three main sequential links: the primary user-cognitive radio user (PU-CRU) link, the cognitive radio user-cluster header (CRU-CH) link, and, finally, the cluster header-fusion center (CH-FC) link. For the simplicity of illustration, we assume that each cluster contains the same number of CRUs.
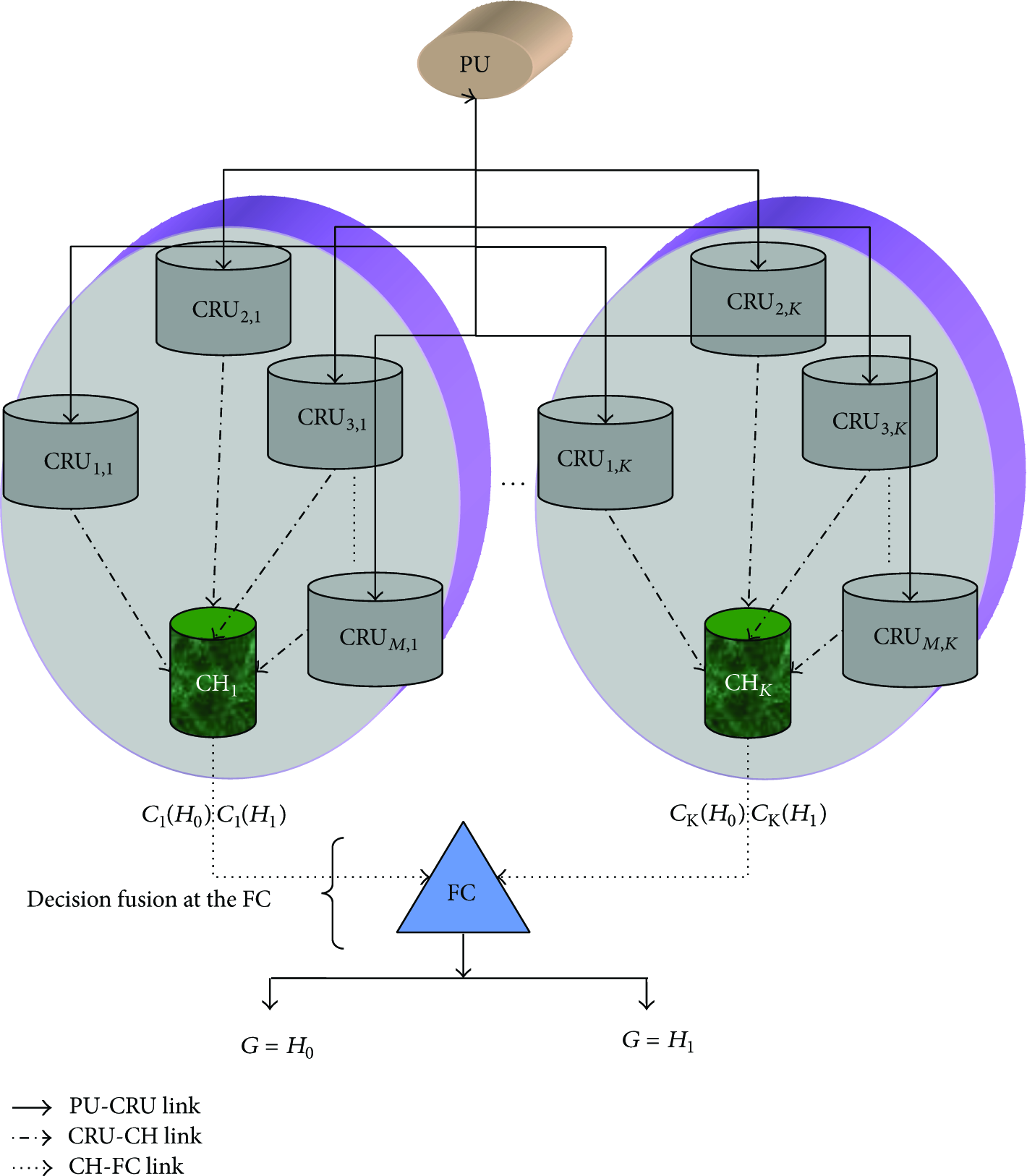
A cluster-based cooperative spectrum sensing in CRN.
2.1. Characterization of Primary User-Cognitive Radio User (PU-CRU) Link
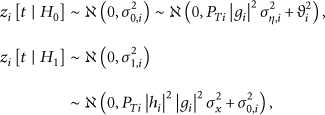
In the PU-CRU link, the CRUs perform local spectrum sensing independently to detect the PU's activities. For CRU i

2.2. Characterization of Cognitive Radio User-Cluster Header (CRU-CH) Link
In the CRU-CH link, the M CRUs relay their individual measurements of the PU's signal,



2.2.1. Conventional Energy Detection (ED) Scheme
At the corresponding CH with M CRUs, each received sequence


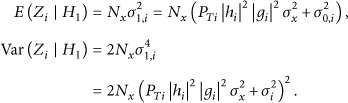

Considering that the cluster decision threshold at the kth CH is
2.2.2. Conventional Eigenvalue-Based Detection (EVD) Scheme
Let us consider a consecutive smoothing factor F. From (3), a set of the received signals


Now, we write the statistical covariance matrices of the received signal




The eigenvalues of the covariance matrix of the received signal vector have the following characteristics: firstly, the statistical covariance matrix
In an ideal case, the correlations of the received signal samples at different times would be larger than zero if the time separations are smaller than the data symbol duration whereas the correlations of the received noise samples at different times should be zero due to the AWGN channel. Let us define the sample autocorrelations of the received signal as follows [27]:
In practical environment, the sample covariance matrix
Proposition 1.
In the conventional EVD scheme, each CRU has a fixed number of samples at the kth of the clusters which is denoted as
Proof.
We know that the number of samples


A conventional CCSS using an EVD technique in CRN [29].
Equation (20) can be rewritten as follows: Select appropriate smoothing factors F and calculate the sample covariance matrix Calculate the eigenvalue Determine the maximum Compare
Here, the conventional EVD threshold


2.2.3. Proposed Eigenvalue-Based Detection (EVD) Scheme
In this paper, we investigate CCSS using an EVD technique with a superposition approach to provide more efficient spectrum sensing. In this proposed EVD scheme, we should utilize the CRU reporting time as a CRU sensing time to sense the PU lengthily. The CRU achieves a nonfixed and a longer sensing time slot

The proposed CCSS using an EVD technique with a superposition approach in CRN.
Proposition 2.
In the proposed EVD scheme, the ith CRU in the kth cluster obtains a nonfixed number of samples which is denoted as
Proof.
In this scheme, all the CRUs have a different waiting time for its reporting to the CH. As an example, the CRU21, the 2nd CRU in the 1st cluster, can utilize reporting time slot of CRU11 for sensing the PU's signal, and 3rd CRU31 can utilize reporting time slots of CRU11 and CRU21 for spectrum sensing and so on. From Figure 3, it is observed that the ith CRU in the first cluster has a nonfixed number of samples to sense the PU's signal as follows: Select appropriate smoothing factors F and calculate the sample covariance matrix Calculate the eigenvalue, Determine the maximum Compare
The proposed threshold









2.3. Characterization of Cluster Header-Fusion Center (CH-FC) Link
In the CH-FC link, all CHs communicate with a fixed FC through a dedicated control channel. The aggregated cluster decisions will be forwarded from the K CHs to the FC at which a final global decision is made based on HDF. The HDF is used to reduce the reporting traffic overhead from the K CHs to the FC.
2.3.1. Conventional Energy Detection (ED) Scheme
In this paper, it is assumed that the reporting channel of the kth CH-FC link is a binary symmetric channel with a probability of reporting error,

2.3.2. Conventional Eigenvalue-Based Detection (EVD) Scheme
In conventional EVD scheme, the final global decision G of the whole CRN for the two data fusion rules are made upon the following simple forms:

2.3.3. Proposed Eigenvalue-Based Detection (EVD) Scheme
In this proposed EVD scheme, the final global decision

3. Simulation Results
In order to evaluate the proposed scheme, Monte-Carlo simulations were carried out under following conditions: the sampling frequency
Under such a condition, the curves of receiver operating characteristics (ROC) are illustrated in Figure 4. It is shown that the proposed EVD scheme has the highest probability of detection compared with both the conventional EVD and ED schemes because the proposed superallocation can have longer sensing time than both conventional approaches. The larger smoothing factor (F) means the higher probability of detection. However, it is very difficult to determine the best F because it is related to signal property.

The ROC curves of the conventional ED scheme, conventional EVD scheme, and the proposed EVD scheme for different smoothing factors.
In an environment with noise uncertainty, it can assume that we need the probability of detection to be more than 0.9 and the probability of false alarm to be less than 0.1. In both conventional ED and EVD schemes, we can achieve the target sensing performance with a longer sensing time slot but the throughput of the CRN decreases. In the proposed EVD scheme, we can easily achieve more than 0.9 and less than 0.1 for the probabilities of detection and false alarm, respectively, because CRU reporting time and CH reporting time merge to sense the PU signal more accurately without decreasing system throughput.
Finally, Figure 5 shows ROC curves for the global decision at FC for the conventional cooperative ED scheme, the conventional cooperative EVD scheme, and the proposed cooperative EVD scheme with cluster reporting time. In each cluster, 4 CRUs are spread in the network to perform local sensing where distributed CRUs have different SNR values. We consider the condition in which the received signals of all four CRUs are given by −28 dB, −20 dB, −15 dB, and −10 dB, respectively. Also, we have considered both OR-rule and M-rule [30] as a data fusion rules at the FC. Under such a condition, the probability of detection of OR-rule is always larger than M-rule. The conventional EVD scheme has better detection performance than the conventional ED scheme for both OR-rule and M-rule. By utilizing OR-rule, it is shown that the proposed EVD scheme has better performance compared with both the conventional EVD scheme and ED scheme, for the M-rule as well. The simulation results proved that the propose EVD scheme has the ability to significantly improve the sensing detection performance in CRN.

Global probabilities of detection and false alarm of the conventional cooperative ED, conventional cooperative EVD, and proposed cooperative EVD when four CRUs’ SNRs are given by −28 dB, −20 dB, −15 dB, and −10 dB, respectively.
4. Conclusion
In this paper, we have proposed a CCSS in CRN using an EVD technique with a superposition approach. The proposed EVD scheme can achieve better detection performance in comparison with both the conventional EVD scheme and ED scheme because of each CRU to sense the PU's signal more accurately by rescheduling the reporting time slots of CRUs and CHs as obtain a longer sensing duration that are guaranteed for all CRUs. As further works, the other noise conditions including impulse noise can be considered.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was supported in part by the Information and Communication Technology (ICT) Division, Ministry of Post, Telecommunication and IT, Bangladesh, and in part by the National Research Fundation of Korea through the Basic Science Research Program funded by the Ministry of Science, ICT, and Future Planning [NRF-2014R1A1A1002179].