
Abstract
We proposed a mobility model of connected vehicles with wireless communications. The proposed mobility model is inspired by the fish school, which takes into account several significant attractive/repulsive potential fields induced by the expected mobility, the tendency to avoid collisions, and the road constraints. With this model, we present a comprehensive approach for designing and analyzing the potential fields acting on connected vehicles. Based on the Lyapunov stability theorem, a theoretical analysis is also provided to show that the cooperative collision avoidance and stable constrained flocking of connected vehicles can be performed by using this model. The numerical experiments prove the effectiveness of the wireless communication on the safety and efficiency of connected vehicles.
1. Introduction
In recent years, more and more researches on swarm intelligence have been advanced and utilized in the fields of engineering, artificial intelligence, robotics, and transportation [1]. The cooperative behaviors of vehicles have been researched for the sake of giving a deep insight into traffic models [2]. With the rapid growth of wireless communication technologies, a large number of vehicles form a vehicular ad hoc network and cooperate with each other; thus collision warning, road obstacle warning, intersection collision warning, and lane change assistance can be improved [3, 4]. Those connected vehicles move in a cooperative manner, which is similar to some cooperative behaviors of animal flocking in nature. Therefore, it is convenient for researchers to model the connected vehicles as a group by drawing an analogy to the animal flocking. The goals of this paper are twofold: (i) to mathematically model the cooperative movements of the connected vehicles with the wireless communications based on the fish school, and, (ii) in the meanwhile, to provide the comprehensive evaluation of the influence of connected vehicles on the safety and efficiency.
The wireless communication technologies expand the sensing range of vehicles and enhance the information interplays among vehicles moving in the same road section. For example, one popular application of these wireless communication technologies in vehicular system is vehicular ad hoc network (VANET) which is supported through vehicle-to-roadside (V2R) and vehicle-to-vehicle (V2R) communications. There are large numbers of studies on signal propagation in vehicle-to-roadside and vehicle-to-vehicle communications, such as works [5, 6], which focus on the mechanism of communication under various traffic situations. Besides, other studies are working on the impacts of the cooperated vehicles on the transportation system where the communication technologies are widely deployed. For instance, the work [7] investigates the impact of the number of cooperative vehicles on the network performance under Nakagami fading channel. Moreover, the wireless communication also can be used to assist in developing the driving-assistance system [8], whereas there are few studies paying attention to the behaviors of the cooperative behaviors of the connected vehicles moving in the same road section as a group. It is a large challenge to model the cooperative behaviors of connected vehicles, because the interplays among vehicles as well as some environmental factors that influence the vehicular movement should be carefully identified at first and then mathematically formulated. Nevertheless, this work aims at this issue by following the bioinspired modelling approach. Since the cooperation is one characteristic of the animal flocking such as fish school, we draw on the mechanism of flocking in biosphere (i.e., the fish school) to model the cooperative behaviors of the connected vehicles.
The cooperative behaviors of animal flocking are usually governed by the three rules: cohesion, separation, and alignment [9, 10]. Some other researchers turn to the evolutionary models to simulate the evolving animals. These studies, for instance, the selfish herd theory [11], the predator confusion effect [12], and the dilution effect [13, 14], attempt to answer the key question of how flocking behavior evolves. As illustrated in some early studies, the typical examples for biological behavior in the same movement pattern include bird flocks, fish schools [15], insect swarms [16], and quadruped herds [17]. Nowadays, as a collective behavior, flocking is not only exhibited by animals of similar size which aggregate together, but also presented in the crowd and the vehicles [18, 19]. In fact, cooperative behaviors are pervasive among all forms of self-propelled particles [20]. Hence, these fundamental works pave the way to applying the rules and approaches for modeling the biological cooperative behaviors to other engineering fields.
Moreover, bioinspired approaches have been widely adopted in a lot of existing literature in the field of modeling mobility of flocking individuals moving as a group [21–23]. In nature, a large number of fish swim as a disciplined phalanx and they can stream up and down at high speed, twist in different ways, vary school shapes, and avoid obstacles without collisions. In order to coordinate its behavior with the overall schooling, fish has a sensor-response system to steadily keep the relative position among their neighbors regardless of their topology changing all the time. The lateral-line system is very sensitive to changes in water currents and vibrations so that fish is able to dynamically and adaptively respond to their environmental changes in time [24]. The environmental signals can be propagated throughout the group, which results in a unified group decision making. To better understand the basic nature of the influences at work in a school of fish, many works have discussed and presented an algebraic approach to describe the interplay in the fish school [22].
Inspired by the aforementioned behaviors of fish school, we are allowed to draw an analogy between the connected vehicles and the fish school. With the assistance of the advanced sensors, such as velocity sensor, vehicular positioning system, and navigation system, a vehicle can be provided with the real-time information of velocity, acceleration, position, and other basic parameters and even can feed back the collected information to its neighboring vehicles through wireless communications. That is, the wireless communications system can make each vehicle able to sense their own and environmental information as well as share the collected information with their neighbors, which is similar to the environment-sensing behavior of fish school. Furthermore, with wireless communication, vehicles are able to coordinate their movement (velocity and direction) according to the environmental situation and the overall mobility of the vehicle group. Each vehicle can interact with its neighbors in real time via wireless communication system so that they can move in a cooperative manner. This is similar to the cooperative behavior of fish school which is induced by the interplays among different fish. In this sense, some rules characterizing the behaviors of fish school such as the cohesion, the separation, and the alignment can be adopted to present the cooperation of those connected vehicles to some extent. In addition, another important character of fish school behavior is danger avoidance (such as avoiding obstacles or predators), which can be analogous to the collision avoidance. Moving fish can form a coordinated school and shift back to an amorphous shoal within seconds when facing emergence or obstacles [24]. Obstacle avoidance has been studied in many flocking researches [25–27]. However, these studies have not considered the realistic applications of the models. Hence, it is significant to provide some mathematical models for describing the mobility of connected vehicles when taking obstacles avoidance into account. In the meanwhile, some important factors should be additionally considered, well defined, and formulated in modeling, which include the constraints of road and the constraints of traffic rules, when drawing an analogy between the vehicle group and the fish school.
In this paper, a novel model has been proposed to formulate the movement of connected vehicles with considering some realistic traffic situations where the constraints of the road and road obstacles exist. By analogy, connected vehicles also follow some similar regulations governing the fish school. The interplay among connected vehicles is mathematically modeled by introducing the potential field functions that are induced by fish school behaviors. In addition, a theoretical analysis framework is provided to verify the rationality of proposed model. Finally, some numerical experiments are also given to demonstrate the model as well as provide a better understanding of the improvement of the safety and efficiency of traffic by wireless communication.
The rest of the paper is as follows. Section 2 proposes a mobility model to describe the connected vehicles and presents the stability analysis. In Section 3, extensive simulations are performed to verify the proposed model. Section 4 concludes this paper.
2. Model of Cooperative Vehicles
2.1. Mobility Model of Connected Vehicles
Moving as a group in the same road section, each vehicle needs to maintain different velocity and accelerate under the effects of forces. In the model, we address the attraction of the goal, the repulsion of the obstacles, the constraints of the road, and the interplays among vehicles in the group including both attractive and repulsive forces. Moreover, we assume that vehicles can communicate with other neighbor vehicles via wireless communication technologies which reflect in sensing range which will be provided later. In this paper, the main notations used throughout the paper are given in Notations.
In the model, each vehicle i belongs to the set of vehicles denoted by

The interplay range of vehicle i.
In order to develop a mobility model which can reflect an accurate traffic situation, the model not only considers the interactive forces among vehicles in the group, but also takes the repulsive forces of obstacles and road boundaries into account. These forces are described by a vector at every location in the force field. Following these considerations, we defined the effects induced by accumulated forces exerted on the vehicle i as follows:

Under the effect of the goal, the vehicles are expected to move in the certain direction in the desired speed. Therefore,

However, in reality, the velocity
One of the characteristics of connected vehicles is cooperative behavior. The vehicles benefit from the wireless communication so that they can cooperate in moving as a group. The vehicles aggregate together in the same movement pattern while keeping the certain safe distance from each other. For the purpose of formulating the group forces among vehicles, we set the interactive forces into two categories including the attractive force and the repulsive force which can make the vehicles run as a group while keeping a certain distance without collision. We lump the attractive and repulsive forces in

In the short distances like the warning scope, the repulsion is increasing with the decreasing of the distances among vehicle i and its neighbors. Likewise, the attraction will play a leading role in making vehicles stay as a group when the distances among vehicle i and its neighbors are larger than the warning scope. In the case that the neighbor vehicle is beyond the bounds of the sensing range
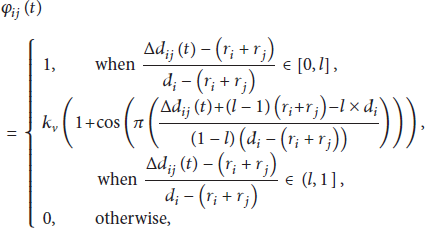
The effects of two kinds of interplays among vehicles, that is, attraction and repulsion, are varying along with the changing relative distance between vehicles. And the comprehensive impact of the interplays can be appropriately modeled with the potential field functions. A bump function model in [28] is adopted to formulate the smooth potential functions with finite cutoffs. In this paper, for the sake of simplicity, the bump function used to indicate the proximity between the vehicles i and j is denoted by

According to the form of the bump function,

Bump function with different parameters.
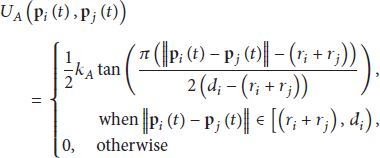
The potential function of attractive force is designed as the form of a tangent function:



The variation of the potential functions with different parameter settings.
From Figure 3, it can be found that the potential functions are both monotonously varying along with the value of the distance
On the other side, some other environmental factors influencing the movement of the connected vehicles should be taken into account as well such as the road obstacles and the road constraints. That is, the vehicles on the road might face the obstacles like accidents, road maintenances, and other emergencies. Besides, the vehicles are also constrained by the road boundaries, which is different from the fish school. In this work, the effects arising from road obstacles and road boundaries are modeled as

Define the vector


Considering the constraints of road is essential for realistic modeling of connected vehicles moving as a group; the road constraints force which is similar to the force of the obstacle is defined as


In addition, in order to make the repulsive forces
2.2. Stability Analysis of Connected Vehicles
Since connected vehicles are equipped with wireless communications, one is able to interact with the others in its sensing range. Thus, these mobile terminals constitute a local vehicular network. The communication topology of these connected vehicles at any time instant t can be presented by a bidirectional graph, which can also be called as communication graph. Let
Corollary 1.
Consider that connected vehicles with wireless communications evolve under the mobility model defined by 1, and given that
Proof.
We can lump all the forces of every vehicle as follows:



Now, we firstly provide some properties of the potential functions
Corollary 2.
Proof.
It is easily obtained that the partial derivative of


Similarly, we present Corollary 3 for the potential function
Corollary 3.
In addition, it is significant to analyze the intragroup mobility besides the basic characteristic of the overall group. From model 1, it can be noted that the connected vehicle group model can be decomposed into two terms: the attractive/repulsive forces induced by the external potentials including

Also, let
Based on the vehicle dynamic system model above, one form of the Lyapunov function


According to Corollaries 2 and 3, it should be noted that

Therefore,
Theorem 4.
Consider that connected vehicles with wireless communications evolve under mobility model 1, and given that
Proof.
According to Corollary 1, those vehicles tend to keep the same desired velocity
Theorem 5.
Consider that connected vehicles with wireless communications evolve under mobility model 1, given that
Proof.
Similar to the proof of Theorem 4, since
3. Simulations
In this section, simulations achieved by MATLAB are provided to verify the model proposed in previous section. The analysis of the results is also given in this section in order to characterize the benefit of wireless communication among vehicles for safety and efficiency of traffic. We set up a traffic scene where an accident situation on the unidirectional road as the obstacle has to be avoided. Then we get the diagram of the trajectories of the connected vehicles to demonstrate that the model can achieve the obstacle avoidance effectively. In addition, we also have the comparative numerical experiment of vehicles with wireless communications and without wireless communications while travelling which characterize the impacts of the communications in the connected vehicles.
The simulation scene is assumed on a section of a unidirectional road. The unidirectional road we concentrate on is 2000 meters long and 50 meters wide. We suppose that an accident occurs on the road where the location of the center of it is marked as
The number and the velocity of vehicles are produced randomly at the start of simulations. During the simulations, those connected vehicles are controlled by our proposed model to move as a cooperative group, whose direction is consistent. In all simulations, we fix the time interval for updating the kinematic information of each vehicle at 0.1 s. Besides, the physical parameters of the vehicle are given as
3.1. Obstacle Avoidance Trajectory
Figure 4 shows the various travelling trajectories of each vehicle when the vehicle group comes across the obstacle in different average velocities. In these simulations, the average velocities are set to 10 m/s, 15 m/s, and 20 m/s separately in order to explore the performances of avoiding obstacles in different velocities. What is more, the total number of vehicles is the same in these three simulations set as

The travelling trajectory of vehicles.
3.2. Impacts of Wireless Communications
In order to explore the influences of wireless communications on the overall mobility of connected vehicles, we also conduct other comparative numerical experiments. In the simulations, when any vehicle i is considered to be equipped with wireless communications, its sensing range is set to
(i) Probability of a Vehicle Moving into the Local Warning Scope of Obstacle
(ii) Probability of a Vehicle Moving into the Local Warning Scope of Other Vehicles
Subsequently, let

In a real life traffic situation, the vehicle velocity will significantly affect the mobility of the overall vehicle group. In addition, it is necessary to evaluate the traffic efficiency of connected vehicles flocking as a group under different vehicle numbers (indicating the traffic density). Therefore, in this paper, the impacts of the wireless communications of connected vehicles by varying vehicle velocity and vehicle number are studied.
To analyze the impacts on road safety level, firstly, we vary the initial vehicle velocity from 10 m/s to 30 m/s and fix the total number of vehicles at

The results of
Next, we turn to focus on the effects of different vehicle numbers of the group on the safety level. For comparison, the following experiment is processed by varying the vehicle number from 10 to 70 and fixing the initial vehicle velocity at 20 m/s. Also, the simulations have been performed with 30 replications per vehicle number and, subsequently, the results of

The results of
In fact, there are no obstacle collisions or vehicle collisions occurring during simulations, which is because the proposed mobility model is adopted to simulate the cooperative behaviors of connected vehicles. What is more, as theoretically analyzed before, collisions can be avoided between vehicles evolving with the comprehensive effects of potential forces in the proposed mobility model. Even though no collisions are induced, the potential danger on the road in actual situations may exist. Thus, with considering the evaluation metrics
To provide a deep insight into the impacts of wireless communications on the road traffic efficiency, we would like to conduct some other simulations. Firstly, we fix the total vehicle number as

The results of flow rate.
In the next experiment, the initial velocity of all the vehicles is fixed at 20 m/s, and the total vehicle number is set to range from 10 to 70. Similarly, the simulations in this experiment have been performed with 30 replications per vehicle number point. The results are shown in Figure 7(b). The flow rate obtained in the “Equipped” case at each vehicle number point is obviously larger than that of the “Unequipped” case. This indicates that the vehicle group of a small or a large size can benefit more from the wireless communication, since those equipped vehicles can coordinate their velocity more smoothly according to the overall movement of the group via wireless communication systems. At this point, this result confirms that the wireless communications are promising to improve the overall efficiency of the road traffic.
4. Conclusions
In this paper, the connected vehicles are analogized to the fish schools in order to develop a more realistic model to describe the mobility of the connected vehicles with the wireless communications. The proposed model consists of the attraction of the goal, the repulsion of the obstacles, the constraint of the road, and the interplays of vehicles in the group including both attractive and repulsive affection. Many simulations are performed to verify that the wireless communications among vehicles can improve the safety and efficiency of traffic greatly, and the numerical experiments prove the reasonableness of the model in terms of describing the cooperative behaviors of connected vehicles with wireless communications.
Footnotes
Notations
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research is supported by the National Natural Science Foundation of China under Grant nos. 61103098, 91118008 and 61302110 and the Foundation of Key Laboratory of Road and Traffic Engineering of the Ministry of Education in Tongji University.