
Abstract
Mobile localization is a significant issue for wireless sensor networks (WSNs). However, it is a problem for the indoor localization using received signal strength (RSS) measurements that the signal is contaminated by the anisotropy fading and interference due to walls and furniture. Standard schemes such as Kalman filter are inadequate as the random transition of line-of-sight (LOS)/non-line-of-sight (NLOS) conditions occurs frequently. This paper proposes an indoor mobile localization scheme with RSS measurements in a mixed LOS and NLOS environment. First, a new efficient composite measurement model is induced and validated, which approximates the complex effects of LOS and NLOS channels. Second, a greedy anchor sensor selection strategy is adopted to break through the constraints of hardware consistency and the multipath interference. Third, for the Markov transition between LOS and NLOS conditions, an effective unscented Kalman filter (UKF) based interactive multiple model (IMM) is proposed to estimate not only the posterior model probabilities but also a weighted-sum position estimation with the aid of likelihood function. To evaluate the proposed algorithm, a complete hardware and software platform for mobile localization has been constructed. The numerical study, relying on the actual experiments, illustrates that the proposed UKF based IMM achieves a substantial gain in precision and robustness, compared with other works.
1. Introduction
Mobile location estimation has already been a popular research topic for decades. Different solutions based on angle of arrival (AOA), time difference of arrival (TDOA), time of arrival (TOA), and received signal strength (RSS) have been reported in literature [1, 2]. Applications of these techniques arise, such as in emergency services, location-based billing, smart home, fleet management, and intelligent transportation systems (ITS) [2]. Here, we concentrate on mobile terminal tracking based on RSS measurements in wireless sensor networks (WSNs).
Accurate position estimation would be feasible using an efficient filtering, if a direct physical connection between the mobile terminal (MT) and the anchor sensor (AS) exists; that is, the channel can be considered as line-of-sight (LOS). However, in certain environments, especially in indoor areas, reflection and diffraction occur often between the MT and AS. The worsened propagation decay, corresponding to non-line-sight (NLOS), leads to a misestimated range. The erroneous position estimations would occur when using normal strategies. Meanwhile, the frequent transition between LOS and NLOS will cause a serious measurement error for the range estimation because the estimated covariance of the measurement noise is not adaptively to match the true covariance in the LOS and NLOS cases. So the estimators which are robust against a mixed LOS/NLOS environment are required.
This burning question has been of considerable interest for many years [3–14]. These localization algorithms can be grouped into two categories: detection-based approach and estimation-based approach. The detection-based localization algorithms rely on either the residual or the prior information of the NLOS error in the detection hypotheses on the basis of statistical decision theory [15–17]. One limitation of these algorithms is that it requires at least 3 measurements. Locating a MT in NLOS environments is also considered in [18, 19] to improve accuracy by smoothing the measurements or overweighting the LOS ASs. Another method based on modified probability data association (MPDA) is proposed in [14]. This method constructs different subgroups of measurements. Then intermediate results of the LOS subgroups are combined to reach the final estimated position of the moving target. However, in severe NLOS conditions, it is very likely that no subgroup is detected as LOS at many time instances. As a result, no new measurement is available to update the filtering.
While the estimation-based approaches utilize the statistical properties of the LOS and NLOS noises and reconstruct posterior estimated position [3–5, 19], they are robust in many NLOS conditions but are not efficient as the high computational cost and incomplete measurement models. As for frequent LOS/NLOS transition in a mixed environment, some good progress with interactive multiple model (IMM) has been made in this category. It [20–22] has been demonstrated as one of the most effective schemes for position estimation in a hybrid dynamic system under uncertain environments. Yang et al. [23] present a location estimation algorithm using fuzzy-based IMM estimator. In [24], IMM is adopted for the MT location estimation as well. However, the indoor environment is quite different from the urban structure in [24]. The system model and estimator seems to be an oversimplification for an indoor application, since it fails to consider the signal attenuated by walls or furniture.
Most existing research works on a localization algorithm under the assumption of different probability distribution functions of the LOS and NLOS noise. However, some other significant distinctions exist between LOS and NLOS propagation, resulting in various new measurement models.
In this paper, we present an efficient MT positioning algorithm using UKF based IMM with individual RSS measurements in a mixed LOS/NLOS indoor environment. In addition, the proposed framework has been evaluated on a practical platform in a real application situation. The main works are as follows.
An effective measurement model is derived to describe the influence of fading caused by the indoor environment and defined as a superposition RIM and Gaussian noise. Furthermore, the model has been verified in an actual indoor building containing the LOS and NLOS channel conditions. A greedy AS selection strategy is introduced to choose the AS with the largest RSS measurement in each time instant. The proposed strategy is much easier to implement in the practical application, to reduce the communication traffic and lower the requirement of the hardware. The unscented Kalman filter (UKF) is employed to treat the estimator. The point of sampling conquers the severe nonlinear of the mapping of RSS to range. By integrating the filter into IMM, the model probabilities are updated according to the likelihoods of errors. A combination of the weighted respective estimations is achieved as the output result. A complete mobile localization platform, which works on STM32F107VCT and AT86RF231, is established by applying the algorithm into a real indoor scenario. The experiments illustrate that the proposed estimator outperforms some other localization methods [14, 24, 25].
The rest of this paper is organized as follows. Section 2 briefly states the problem of mobile localization in a time-variant environment. Section 3 derives a composite measurement model and validates it in a real application scenario. Section 4 presents the proposed UKF based IMM scheme, with both theoretical analysis and formula derivation. A numerical study relying on the practical experiment data is presented in Section 5 to illustrate the merits of the proposed algorithm and some deep analysis compared with other works. Finally, conclusions are drawn in Section 6.
2. Problem Statement
A synchronous network of N anchor sensors (AS) fixed at the known positions is assumed. Their positions are denoted by a set of m-dimensional vectors
In order to state the problem, a corridor situation in our lab building is illustrated in Figure 1. The solid triangles represent the ASs; the dashed line represents the trace of a MT. All the ASs are located in the rooms along the corridor. Due to the doors, some ASs can be exposed to the MT at some certain locations.
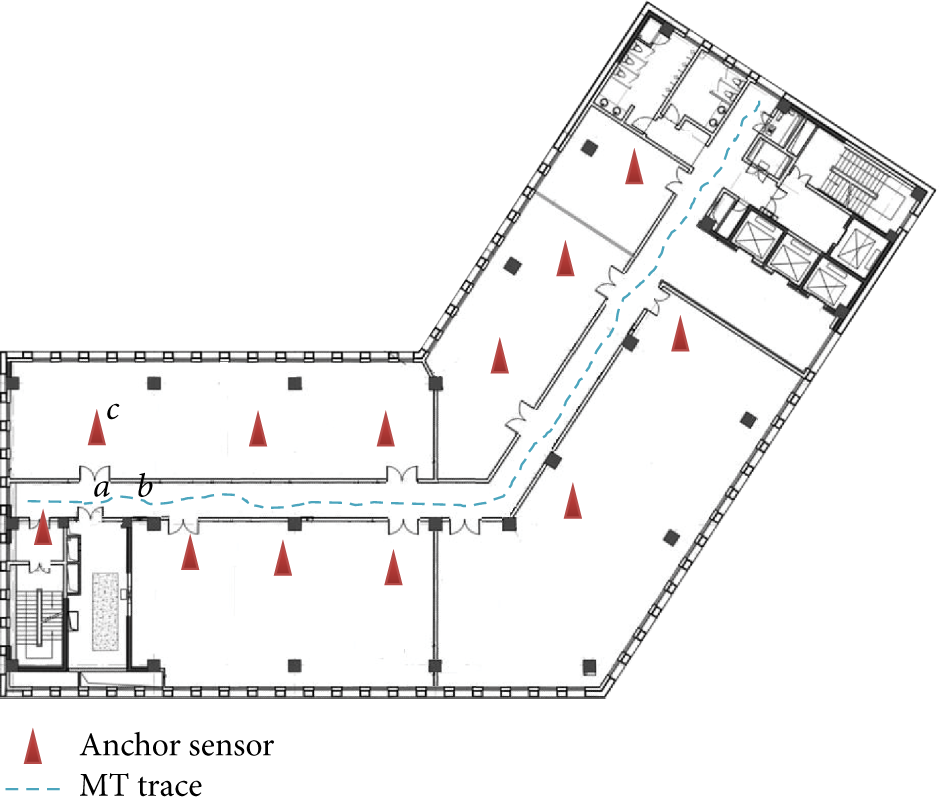
A corridor situation with LOS and NLOS conditions.
The MT moves along the corridor. The unknown positions of the MT at time instant t are denoted by a


When the MT moves, a discovery signal can be measured by the ASs. As the typical case in Figure 2 shows, the discovery signal sent by the MT at b transmits indirectly to the AS at c. The signal path between a and c is regarded as LOS propagation condition, while the one between b and c is regarded as NLOS propagation condition, due to the wall.

Propagating conditions alteration.
Because of the presence of the walls between the MT and the AS, the signal may be reflected, diffracted, and scattered. The signal path loss may be increased by the encountered objects and sharp corners. As a result of the absorption of the walls, the propagation medium is also normally different in diverse directions. On account of the complicated effects on the RSS measurement, the measurement model, a mathematical mapping of RSS to range, is hardly denoted by a single curve.
As a consequence, the measurement model
From the above, an appropriate measurement model is an urgent issue to approximate the mapping of RSS to range. More importantly, it is essential to propose an adaptive localization estimator in order to accommodate the time-variant fading channels.
3. A Composite Measurement Model
In order to approximate the time-variant measurement model, especially the irregular effect on wireless signal fading caused by the obstacles, the RIM model has been introduced [26]. Furthermore, as a measurement, the power measurement
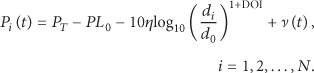
The parameter DOI (degree of irregularity) is defined as the maximum path loss percentage variation per unit degree change in the direction of the radio propagation [26]. As shown in Figure 3, when the DOI is set to 0, there is no range variation, and the communication range is a perfect sphere. However, when the DOI value increases, the communication range becomes more and more irregular.

RIM model with
For different fading channels of LOS and NLOS, there are various DOI values, respectively, marked as


To determine the key parameters above, we make an experiment of RSS measurements collection using 8 ASs and 1 MT over a set of distances ranging from 1 m to 28 m with LOS and NLOS conditions. The whole experiment takes more than 6 hours, with a sampling period 1 s. Figure 4 shows the anchor node and the mobile node. The node is composed of a STM32F107VCT MCU running with an embedded system μCOSII and a ATRF231 RF model working at 2.4 GHz.

Mobile node and anchor node.
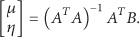
The experiment dataset contains about 380 sets of measurements, and each set corresponds to a certain MT's location, namely, the sampling location. Each set of data contains more than 28800 pairs of RSSs and distances. For any pair of RSS measurement and the known distance, a constraint should be satisfied:



In order to validate the efficiency of the optimal μ and η for LOS or NLOS, we examine it in another experiment where 7 ASs and 1 MT are set at different positions. Figure 5 compares the fitting RSSs according to μ and η above with the real RSS measurements at a series of sampling positions in LOS and NLOS conditions, respectively. Figure 6 illustrates the approximation result in the form of logarithmic ranges. It is clear that the fitting curve can approximate the fading trend of RSS measurements along with the increasing ranges in both propagation conditions. The proposed composite measurement model makes a more complete description of the complex fading model for LOS and NLOS propagation channels.
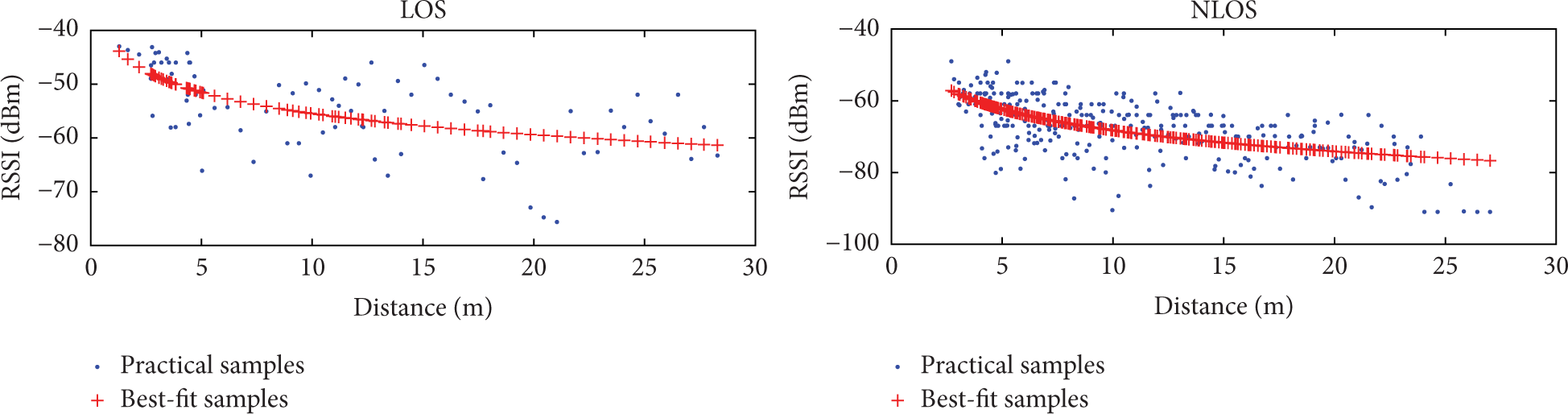
Mapping of RSSI to range at various locations.
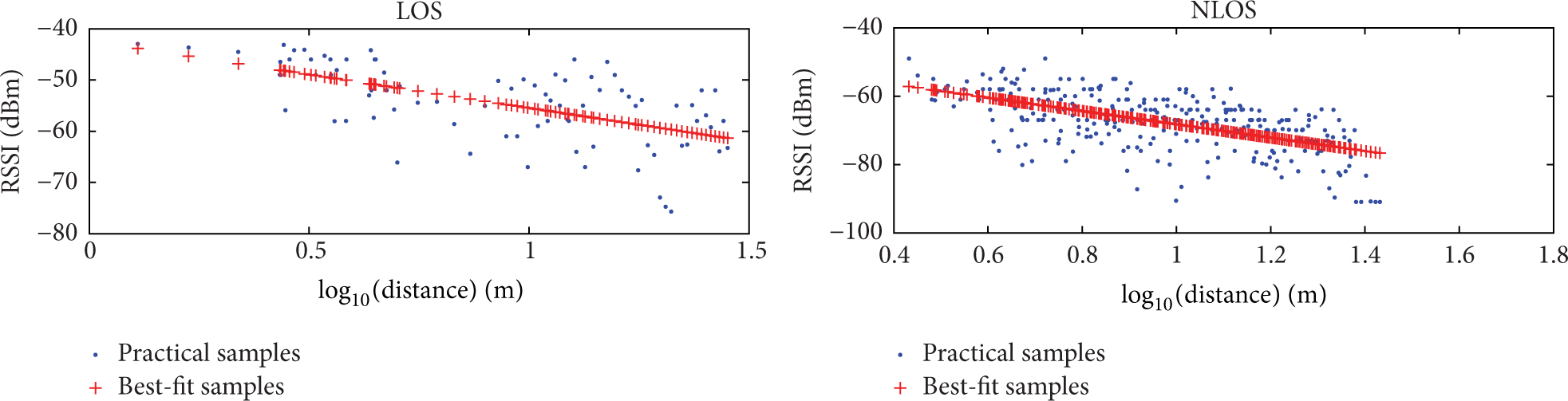
Mapping of RSSI to logarithmic range at various locations.
As a consequence, the composite measurement model of a LOS/NLOS mixed fading channel is defined as follows:

4. UKF Based IMM Localization Estimation
As mentioned above, since the signal propagation indoor is complicated, the fading condition alters between LOS and NLOS cases. The transmission channels between the AS and the MT are considered as a switching mode system. In other words, a LOS/NLOS transition occurs when the MT moves into an environment with the different properties of the propagation medium. A two-state Markov process in Figure 7 is employed to describe the switching system.
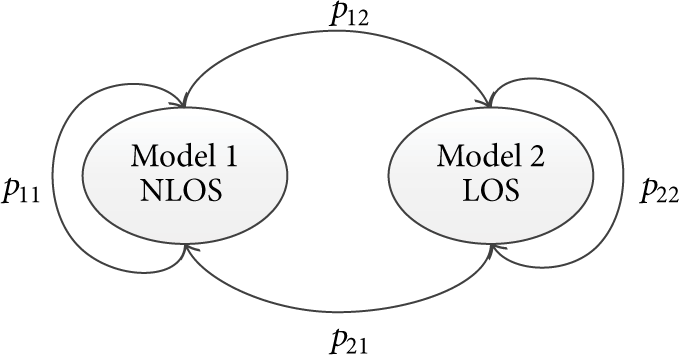
Markov switching system.
A single measurement model corresponding to one propagation condition cannot adjust to both LOS and NLOS situations. It is necessary to introduce a mixed and adaptive scheme against this challenge. Therefore, an UKF based IMM localization estimator is adopted for the LOS/NLOS environment.
4.1. General Concept
The flowchart of the UKF based IMM localization estimation is illustrated in Figure 8.

Flowchart of the UKF based IMM localization estimation.
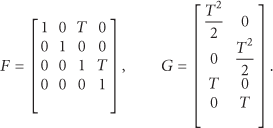
First, as the MT moves, it broadcasts a discovery signal. Based on greedy anchor sensor selection, the AS with the largest RSS measurement
Then, the state
4.2. Greedy Anchor Sensor Selection
As the MT broadcasts the discovery signal in a constant transmitting power, each AS receives this singal and obtains a different RSS measurement due to the different distance. After that, each AS enables a timer with an initial

In this way, the largest RSS is collected to the MT. In (11), the RSS is related to
Furthermore, in a practical system, it is hard to distinguish the ASs if a subtle difference between the first smallest

The scheme of greedy anchor sensor selection.
4.3. UKF-IMM Algorithm
The proposed algorithm consists of three major stages: interaction, filtering, and combination.
4.3.1. Interaction
We suppose that the current multiple-mode states depend on the previous modes, and all the transition probabilities are known. The mixing probability from mode i to mode j can be denoted as



4.3.2. Filtering
Based on the prior knowledge that the measurement models are quite different between LOS and NLOS conditions, two unscented Kalman filters are designed for these two measurement models.
Initializing. For either estimator, the initial state
Sampling. A set of sigma points

The weights
Time Update. Instantiate each point in (16) by the state update function and the measurement function to yield the set of transformed sigma points:


Measurement Update. With the chosen RSS measurement


4.3.3. Combination
When the estimated states are obtained by both estimators, respectively, the model likelihoods and probabilities are required to be calculated in the combination module.
Firstly, the model likelihood
5. Numerical Study
In this section, we use the experiment platform, which is mentioned in Section 3, to evaluate the performance of the proposed localization algorithm. Firstly, we describe our experiment environment and parameters. Then we define the performance metrics to compare the proposed algorithm with other works.
5.1. Experiment Environment
We set up an indoor wireless sensor network with N ASs to monitor a 50 m × 50 m arch field as shown in Figure 1. The total monitoring time is 88 s, and the sampling period T is 1 s. All the ASs within the monitoring region have the same structure. Each AS has the ability to obtain the RSS of the MT's signal. For the LOS propagation channel,
The set of the experiment parameters.
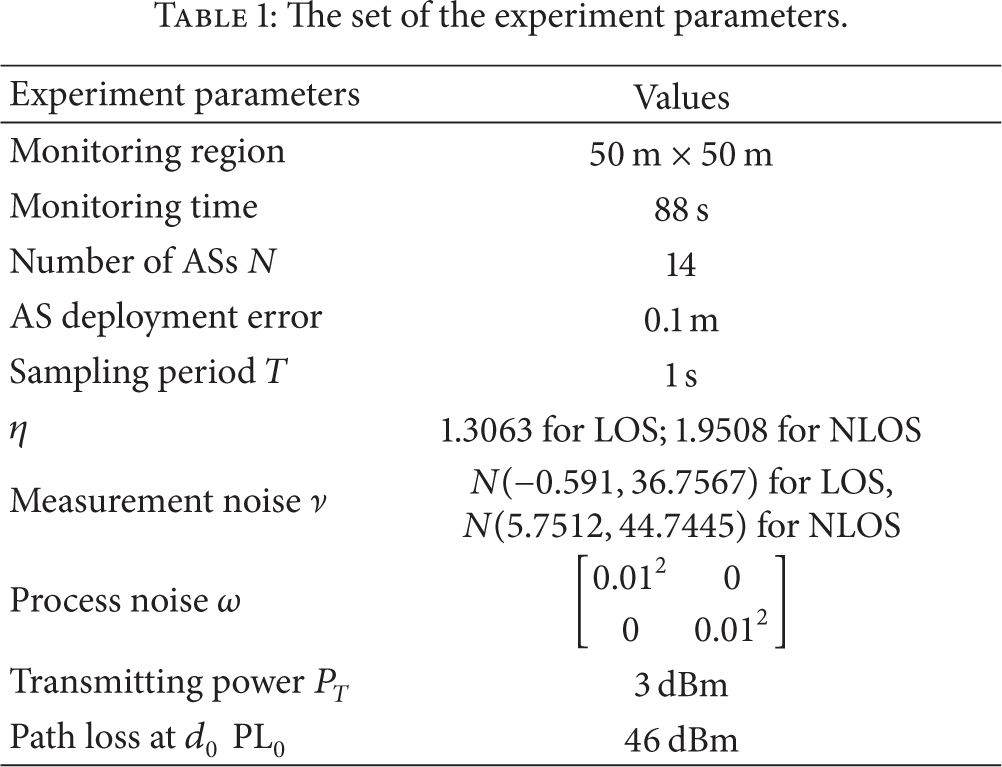
In order to describe the actual experiment, we set the initial states as follows. A MT starts to move along the corridor at
5.2. Performance Metrics
To evaluate the performance of the proposed algorithm and other frameworks, we calculate the root of mean square errors (RMSEs) of localization estimations at each time instant. The RMSE metric [14] is defined as follows:

For the mixed and switching channel situation, an auxiliary but important issue should be observed. The posterior model probability
5.3. Results and Analysis
5.3.1. Performance of Localization
In order to validate the performance of localization accuracy, a comparison with an EKF based LOS model, an EKF based on NLOS model, IMM-EKF [24, 25], and MPDA [14] is carried out below. In Figure 10, the tracking trajectory obtained by the proposed algorithm is shown. Compared with the real trace, which is denoted by the solid line, the trajectory generated by the UKF based IMM algorithm is quite close and follows the moving trend although a maneuver turn happens at 48 s.

Tracking results of the proposed algorithm.
It is clear that the whole trajectory can be divided into two parts: one is from the starting position to the sudden turning point and the other is from the turning point to the end point. The trajectory estimated by UKF based IMM scheme has larger errors in the second part than in the first part. It is noticed that the parameters of the measurement model are obtained in a similar scenario to the first part. It is appreciable that the prior knowledge about the fading conditions fits the first part of the trace more precisely. On the other hand, the proposed algorithm is able to offset the errors produced by a biased measurement model in some degree.
As shown in Figure 11, the performance of UKF based IMM is obviously superior to other works. During the first 20 s, the fading channel is mainly LOS condition with a slight propagation variation. Then the channel condition changes to NLOS. The proposed algorithm remains a smaller RMSE during the next 20 s. In the rest of the monitoring time, the fading channel switchovers several times. The EKF based on LOS gradually diverges with accumulative errors due to an improper measurement model in some certain period. The EKF based on NLOS performs better than the EKF based on LOS because the channel remains in the state of NLOS much longer. Neither of the works relying on a single model or a single measurement reach a satisfactory level. The MPDA benefits from the multiple measurements but fails to adapt to the time-variant environment, especially when there is no subset of available measurements in some positions. It is the key for an estimator not only to update the prediction state with the current measurement but also to adjust to an actual-matched system model. The proposed algorithm also performs better than IMM-EKF, although the main ideas are the same. However, the UKF based IMM conquers a more serious nonlinear system, and the greedy

RMSEs of positions estimated by UKF based IMM and other works.
In Figure 12, the comparison of the velocities of X and Y directions is summarized. Table 2 lists the time-averaging localization RMSEs of the proposed algorithm and other works. Considering the maximum velocity in X or Y direction during the maneuvering is about 0.6 m/s, the velocity errors estimated by MPDA and EKF based on LOS are sizable. It is obvious that the proposed UKF based IMM algorithm remains much smaller errors in velocities. At 47 s in Figure 12, the RMSEs of our algorithm undergoes a estimator transition, while some other works encounter the breaking points.
The time-averaging localization RMSEs of the proposed algorithm and other works.


RMSEs of velocity estimated by UKF based IMM and other works.
The model transition details are shown in Figure 13. The marked line depicts the posterior model probability

Model probabilities of environment (estimated by UKF based IMM and the real situation).
5.3.2. Performance of Robustness
For the referenced works in [22, 24, 25], localization estimators using IMM and EKF with TOA or RSS measurements in a mixed propagation model were presented. The employed EKF achieves an acceptable performance in those cases. However, according to the fading channels and deployment environment, the quotative estimator encounters a performance degradation, especially when the distance between the MT and the AS increases. Table 3 also shows that as the numbers of AS decrease, the average RMSEs of other works increase obviously or remain as a larger level. Some discussion in detail comes below.
Average localization RMSEs for different numbers of ASs.

An UKF recommended by the proposed algorithm performs better than an EKF. It is proved that the approximation precision is closely 3rd-order of Taylor expansion at least, while an EKF depends on 1st-order of Taylor expansion. Besides that, UKF's computation complexity of
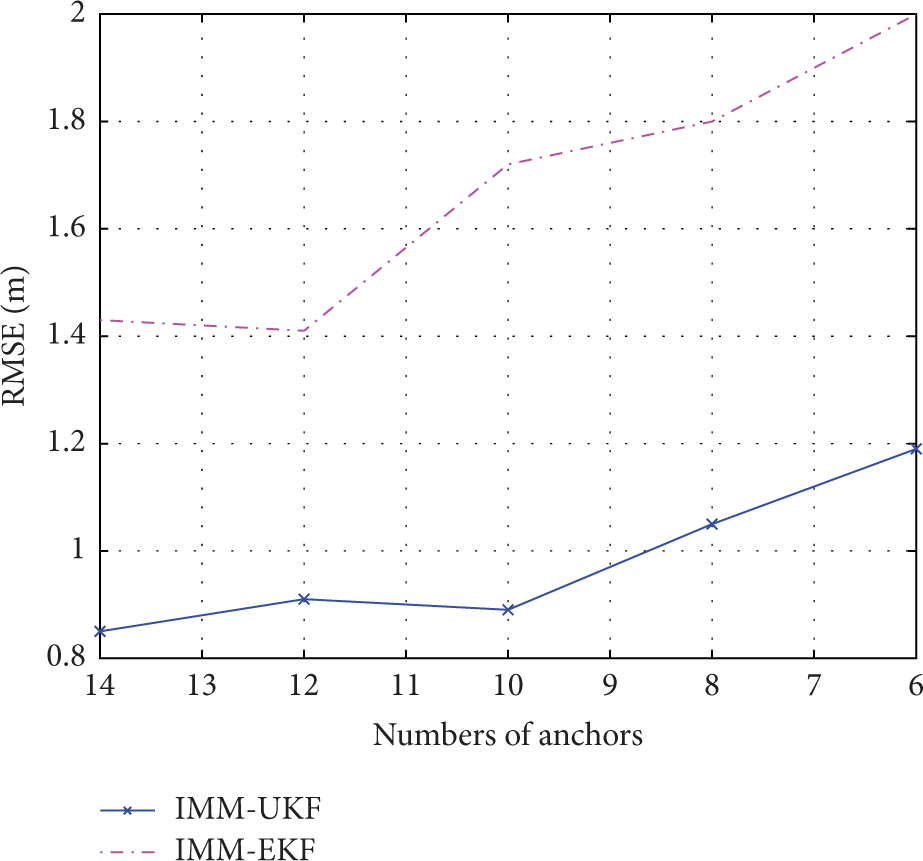
Comparison of the average RMSEs of UKF based IMM and IMM-EKF for different numbers of AS.
Through [29], let 

It is crucial for an UKF that it approximates an arbitrary nonlinear system with the weighted sigma points. These points are deterministically chosen so that certain properties match those of the prior distribution. With this set of points, an UKF guarantees the same performance as the truncated 3rd-order filter.
6. Conclusion
In this paper, we address the problem of robust positioning of a mobile terminal, using RSS measurements in a mixed LOS/NLOS environment. The original measurement models have been reformulated as nonlinear ones, which indicates the anisotropy caused by the indoor obstacles in a NLOS case. We construct the measurement models, which completely describe the differences between LOS and NLOS conditions for an indoor application, and validate our composite measurement model in a real scenario. In particular, the UKF based IMM localization estimator is proposed for mobile location estimation in a practical rough wireless environments. An UKF works better than an EKF, due to its superior ability to approximate the nonlinear system in a higher order. With the aid of the likelihood function to determine the mode probabilities in LOS and NLOS, the proposed UKF based IMM could accurately estimate range distance between the MT and the AS even with the channels switching randomly between LOS and NLOS conditions.
The real experiment results illustrate that the performance of our proposed algorithm achieves high accuracy even in a complex environment where the LOS and NLOS channel conditions switch frequently with obviously different fading. Furthermore, the UKF based IMM scheme manifests robustness against the sparse deployment of ASs. It makes it more practical to utilize a localization system widely.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported in part by the Strategic Priority Research Program of the Chinese Academy of Sciences (CAS) under Grant no. XDA06020300 and the IoT National Standards System Research and Industrial Application and Demonstration based on Information Perception and Identification Technology of Shanghai Science and Technology Commission (SSTC) research projects under Grant no. 12DZ0500100.