
Abstract
An accurate localization algorithm tailored for anisotropic wireless sensors networks (WSNs) is proposed in this paper. Using the proposed algorithm, each regular or position-unaware node estimates its distances only to reliable anchors or position-aware nodes. The latter are properly chosen following a new reliable anchor selection strategy that ensures an accurate distance estimation making thereby our localization algorithm more precise. It is shown that the proposed algorithm is implementable in both 2-dimensional (2D) and 3-dimensional (3D) scenarios. A power saving mechanism aiming to enhance the WSN lifetime is also envisaged in this paper. It is proven that the proposed algorithm could easily incorporate such a mechanism. Simulations show that our algorithm, whether combined or not with the power saving mechanism, consistently outperforms the best representative localization algorithms currently available in the literature in terms of accuracy, even with the presence of nonuniform node distribution or radiation irregularities.
1. Introduction
Due to their reliability, low cost, and ease of deployment, wireless sensor networks (WSNs) are emerging as a key tool for many applications such as environment monitoring, disaster relief, and target tracking [1, 2]. A WSN is a set of small and low-cost sensor nodes with limited communication capabilities. The latter are often deployed in a random fashion to collect some physical phenomena from the surrounding environments such as temperature, light, and pressure [3]. Due to their limited transmission ranges, the sensor nodes are often unable to directly communicate with a remote access point (AP). For this reason, they recur to multihop communication through several intermediate nodes that successively forward their gathered data to the AP. However, the sensing data are very often meaningless if the location from where they have been measured is unknown, which makes their localization a fundamental and essential issue in WSNs. So far, many localization algorithms have been proposed in the literature and mainly fall into two categories: range-based and range-free algorithms.
To properly localize the regular or position-unaware nodes, range-based algorithms exploit the measurements of the received signal characteristics such as the time of arrival (TOA), the angle of arrival (AOA), or the received signal strength (RSS) [4–6]. These signals are, in fact, transmitted by nodes having prior knowledge of their positions, called anchors (or landmarks). Although the range-based algorithms stand to be very accurate, they are unsuitable for WSNs. Indeed, these algorithms require high power to ensure communication between anchors and regular nodes which are small battery-powered units. Furthermore, additional hardware is usually required at both anchors and regular nodes, thereby increasing the overall cost of the network. Moreover, the performance of these algorithms can be severely affected by noise, interference, and/or fading. Unlike range-based algorithms, range-free algorithms, which rely on the network connectivity to estimate the regular node positions, are more power-efficient and do not require any additional hardware and, hence, are suitable for WSNs [7–21]. Due to these practical merits, range-free localization algorithms have garnered the attention of the research community. Unfortunately, in anisotropic environments where obstacles and/or holes may exist, range-free algorithms do not provide sufficient accuracy due to large errors occurring when mapping the hops into distance units. Indeed, in such environments, it is very likely that the shortest path between an anchor and a regular node is curved, thereby resulting in overestimation of the distance between these two nodes. The more obstacles and/or holes there are, the larger distance estimation errors and, consequently, less accurate localization there are.
In this paper, we propose a novel range-free localization algorithm tailored for anisotropic WSNs. Using the proposed algorithm, each regular node estimates its distances only to reliable anchors. The latter are properly chosen following a new reliable anchor selection strategy that ensures an accurate distance estimation thereby making our localization algorithm more precise. New average hop sizes’ expressions are also developed in this paper for both 2D and 3D scenarios. We show that the obtained expressions are very accurate especially for high nodes densities. Furthermore, a power saving mechanism aiming to enhance the WSN lifetime is envisaged. We prove that our proposed algorithm could easily incorporate such a mechanism. Simulations show that our algorithm, whether combined or not with the power saving mechanism, consistently outperforms the best representative range-free localization algorithms currently available in the literature in terms of accuracy, even with the presence of nonuniform node distribution or radiation irregularities.
The rest of this paper is organized as follows: Section 2 describes the network model. Section 3 presents the related works and defines the motivation scenario. Section 4 proposes a novel localization algorithm while Sections 5 and 6 introduce a new reliable anchor selection strategy and a novel distance estimation technique, respectively. A power saving mechanism aiming to enhance the WSN lifetime is envisaged in Section 7. Simulation results are discussed in Section 8 and concluding remarks are made in Section 9.
2. Network Model
Figure 1 illustrates the system model of N WSN nodes uniformly deployed in a 2D square area S in the presence of a rectangle obstacle which makes the network topology C-shaped. All nodes are assumed to have the same transmission capability (i.e., range) denoted by R. Each node is able to directly communicate with any other node located in the disc having that node as a center and R as a radius, while it communicates in a multihop fashion with the nodes located outside. Due to the high cost of the global positioning system (GPS) technology, only a few nodes commonly known as anchors are equipped with it and, hence, are aware of their positions. The other nodes, called hereafter position-unaware or regular nodes for the sake of simplicity, are oblivious to this information. As shown in Figure 1, the anchor nodes are marked with red triangles and the regular ones are marked with blue circles. If two nodes are able to directly communicate, they are linked with a dashed line that represents one hop. Let

Network model (C-shaped topology).
3. Related Works and Motivation
In order to localize the ith regular node (i.e.,



Motivation scenario.
In the following, we develop a novel localization algorithm based on new reliable anchor selection strategy and prove that it outperforms all the aforementioned algorithms.
4. Proposed Localization Algorithm
As a first step of any anchor-based localization algorithm, the kth anchor broadcasts through the network a message containing
In what follows, we develop our proposed reliable anchor selection strategy as well as our distance estimation technique.
5. Reliable Anchor Selection Strategy
After receiving all anchors’ information, the kth anchor becomes aware of its own position as well as those of all other anchors in the network and, hence, is able to compute all true distances separating it from the latter. On the other hand, this anchor could also compute the estimate of the distance to any other anchor j and the corresponding estimation error

However, some anchors deemed reliable by the nearest anchor could be found unreliable by the regular node, since the shortest path from the latter to these anchors may be curved as shown in Figure 3. To circumvent this issue, we implement a finer selection at the regular node that discards each anchor having a number of hops larger than
% k refers to the kth anchor node %
Broadcast the set
% i refers to the ith regular node % % node from the ith regular node % % regular node %
% set %

Reliable anchors.
6. Distance Estimation Technique
We propose in this work to estimate each regular-anchor distance using (1). To this end, one should accurately derive the average hop size

6.1. Two-Dimensional (2D) Case
As can be shown from Figure 4,







2D distance analysis.
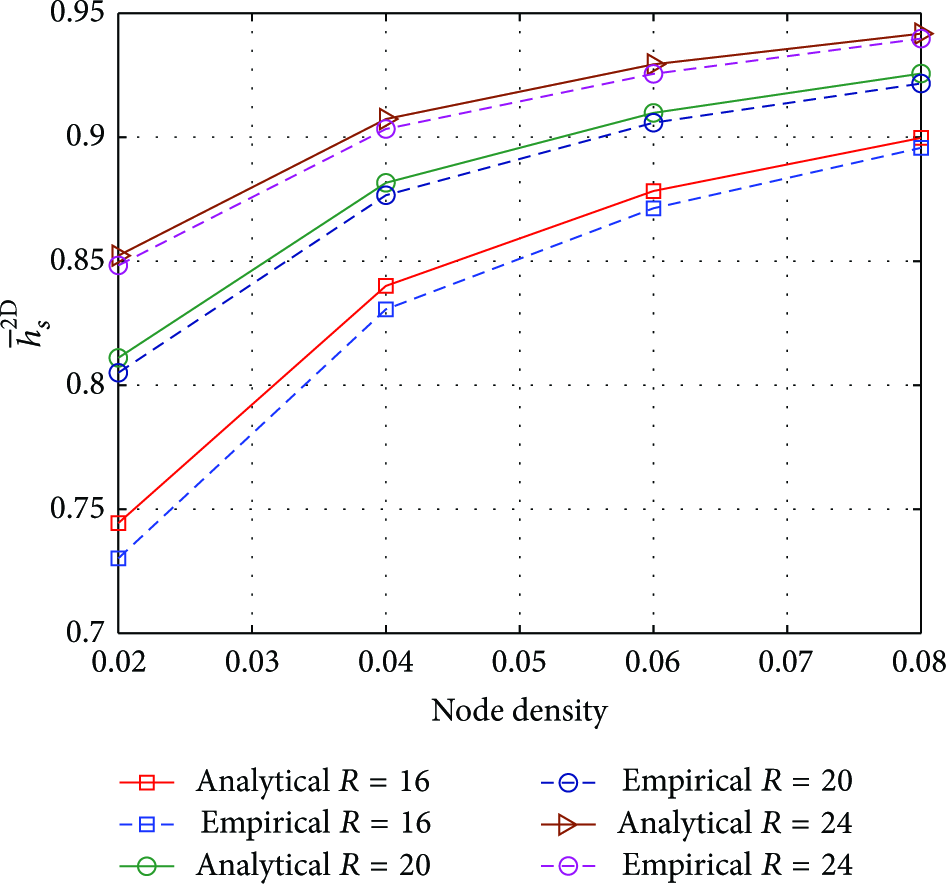
Analytical and empirical results of
6.2. Three-Dimensional (3D) Case
Since each node is able to communicate with any other node located at most at R meters from it, its transmission coverage in the 3D case is spherical. Let us denote by V the forwarding zone defined as






3D distance analysis.

Analytical and empirical results of
7. Power Saving Mechanism
In order to provide the required operational power, WSN nodes are usually equipped with batteries or energy harvesting devices. However, the batteries have a very limited capacity while energy harvesting using the technologies so far developed is not only very expensive, especially if embedded in large scale WSNs but also unable to provide the sufficient amount of energy. This makes power saving a crucial mechanism in WSNs. If such a mechanism is not taken into account during the localization process, it may hinder localization accuracy. In what follows, we will show how a power saving mechanism could be easily incorporated in our proposed localization algorithm. Although several power saving mechanisms exist in the literature, we are only concerned in this paper by the most basic mechanism which consists in switching periodically each node between the awake (i.e., power on) and the sleep (i.e., power off) states to save power and, hence, increase the WSN lifetime. Using this mechanism, the time is equally divided into cycles where each node independently decides whether to be awake or asleep. This causes the randomization of the number of available (i.e, in the awake state) nodes assumed to be equal to N in (12) and (18) may hinder localization accuracy. To circumvent this issue, we propose to substitute N in these two equations by the average number of available nodes



8. Simulations Results
In this section, we evaluate by simulations the performance of the proposed algorithm in terms of localization accuracy using Matlab. These simulations are conducted to compare, under the same network settings, the proposed algorithm with some of the best representative localization algorithms currently available in the literature, that is, DV-Hop [7], RAL [21], and pattern-driven [20]. Simulations are run both in 2D and 3D cases. In the 2D case, nodes are assumed to be uniformly deployed in a square area

Anisotropic WSN topologies.
As an evaluation criterion, we propose to use the normalized root mean square error (NRMSE) defined as follows:

Figure 9 plots the localization NRMSE achieved by DV-Hop, RAL, pattern-driven, and our proposed algorithm versus the node density with a constant number of anchors set to be 20 in C-, W-, and S-shaped network topologies. Figures 9(a), 9(c), and 9(e) provide the results of the 2D case, while Figures 9(b), 9(d), and 9(f) provide those of the 3D case. As can be shown from these figures, the proposed algorithm always outperforms its counterparts. Indeed, in the 2D case (3D case), it is up to about 80% (180%), 70% (100%), and 60% (60%) more accurate than DV-Hop, RAL, and pattern-driven, respectively. Furthermore, our algorithm achieves almost the same performance in the three network topologies while DV-Hop's, RAL's, and pattern-driven's performance, which are already poor in the C-shaped topology, severely deteriorate in the W-shaped topology, more so in the S-shaped topology.

Localization NRMSE versus node density with
Figure 10 shows the NRMSEs’ standard deviations achieved by all localization algorithms for different node densities in the C-, W-, and S-shaped network topologies. Figures 10(a), 10(c), and 10(e) provide the results of the 2D case, while Figures 10(b), 10(d), and 10(f) provide those of the 3D case. As can be seen from these figures, the NRMSEs’ standard deviations achieved by DV-Hop, RAL, and pattern-driven slightly decrease when the node density increases while the one achieved by the proposed algorithm substantially decreases. This means that implementing our algorithm in any network topology guarantees an accurate localization for any given realization. This result is very interesting in terms of implementation strategy, since it proves that the result in Figure 9 becomes more and more meaningful as λ grows large.

Localization NRMSE's standard deviation versus node density with
Figure 11 illustrates the localization NRMSE's CDF achieved by DV-Hop, RAL, pattern-driven, and our proposed algorithm with

Localization NRMSE's CDF with
Figure 12 plots the localization NRMSEs achieved by our proposed algorithm and its counterparts versus the anchors number with

Localization NRMSE versus anchors number with
Figure 13 displays the localization NRMSEs achieved by the proposed algorithm and its counterparts versus

Localization NRMSE versus
Figure 15 plots the localization NRMSEs achieved by the proposed algorithm and its counterparts versus the nodes density with different anchors placement strategies: perimeter, grid, and random as depicted in Figures 14(a), 14(b), and 8, respectively. This figure shows that the grid anchors’ placement is the most efficient strategy in W- and S-shaped topology while the random anchors’ placement is the best in the C-shaped topologies. This result is very interesting since it proves that the performance of each strategy is closely related to the network topology. In other words, if the latter is known beforehand, we will be able to select the appropriate strategy when deploying the WSN.

Anchors’ placements illustrated C-shaped topology.

Proposed algorithm's NRMSE versus anchors’ placements in C-, W-, and S-shaped network topologies in 2D and 3D cases.
Figures 16 and 17 plot the localization NRMSEs achieved by the proposed algorithm and its counterparts versus the nodes density and the degree of range irregularity (DoI), respectively. In Figure 16, a nonuniform nodes’ deployment is assumed while in Figure 17 the transmission range is no longer assumed circular. A range irregularity model similar to that in [23] was implemented instead. From these figures, the localization NRMSEs achieved by all algorithms deteriorate due to both nonuniform nodes’ deployment and range irregularity. This is expected since these phenomena are not taken into account when designing the proposed algorithm and its counterparts. However, as could be observed from Figures 16 and 17, the proposed algorithm remains more accurate than its counterparts. This further proves the increased robustness of our proposed algorithm to model imperfections.

Localization NRMSE with

Localization NRMSE versus DOI with
9. Conclusion
In this paper, we proposed a novel range-free localization algorithm tailored for anisotropic WSNs. Using the proposed algorithm, each regular node estimates its distances to reliable anchors only. The latter are properly chosen following a new reliable anchor selection strategy that ensures an accurate distance estimation thereby making our localization algorithm more precise. New average hop sizes’ expressions were also developed in this paper for both 2D and 3D scenarios. We showed that the obtained expressions are very accurate especially for high nodes densities. Furthermore, a power saving mechanism aiming to enhance the WSN lifetime was envisaged. We proved that our proposed algorithm could easily incorporate such a mechanism. Simulations showed that our algorithm, whether combined or not with the power saving mechanism, consistently outperforms the best representative range-free localization algorithms currently available in the literature in terms of accuracy, even with the presence of nonuniform node distribution or radiation irregularities.