
Abstract
Cognitive radio ad hoc networks (CRAHNs) are active, self-organized, and dynamic networks, in which cognitive users can communicate with each other in an ad hoc fashion. Various delay and energy-based routing protocols have been proposed for CRAHNs. However, these protocols do not consider the delay and node energy in the routing process, which can significantly affect performance. Delay and node energy are important factors in ad hoc networks in which devices have limited power. In this paper, we propose a new routing protocol, named low-latency and energy-based routing (L2ER) protocol; it considers both delay and energy for the routing decisions in CRAHNs. The performances of the proposed protocol are evaluated comparing to two other protocols in terms of average throughput, end-to-end delay, packet delivery ratio, and network lifetime. Simulation results show that the proposed protocol performs better than the existing protocols in many aspects.
1. Introduction
The Federal Communication Commission (FCC) published a report [1] about spectrum management. This report brings a significant revolution in the research area of dynamic spectrum access (DSA). In the DSA research arena, different new programmable and intelligent devices are developed. These devices can sense, share, and perform mobility among the unused portion of the licensed spectrum bands. Cognitive radio (CR) is one of the new technologies that can change its operational parameters according to the environment [2]. CR plays an important role in emerging applications, including public safety [3], smart grid, military, medical, and mission critical networks [4]. By using this new technology, devices operate in different frequency bands, which is extremely useful in emergency scenarios. A large part of the unused spectrum exists in different cellular networks and by using this technology, we can opportunistically access these underutilized bands. CR technology also provides reliable and delay-sensitive communication for delay-tolerant networks (DTNs) [5].
Cognitive radio networks (CRNs) are formed by CR devices, which include two types of users: licensed or primary users (PUs) and unlicensed or secondary users (SUs). PUs operate on static spectrum allocation policies, as used in traditional wireless communication systems. In comparison, SUs are equipped with cognitive devices that can perform dynamic spectrum access operations. Cognitive users also compete with PUs for available resources in the network and exploit them in the absence of PUs. SUs do not disturb the communication of PUs by limiting the interference with licensed users. In CRN, the cognitive users coexist with PUs. CRNs can be further classified into two networks [2]: infrastructure-based cognitive radio networks and cognitive radio ad hoc networks (CRAHNs).
The routing protocols for CRAHNs utilize the flexibility of CR devices that can perform switching among different channels and address various issues that are not present in the routing protocol for traditional wireless networks. In CRAHNs, the CR links in every hop can be chosen dynamically among multiple possible channels in nature; therefore, traditional routing protocols considering only one channel over an end-to-end route are not suitable for it. Consequently, there is a need for new routing approaches that are related to CR-based environments. While most of the previous research on cognitive radio reports the physical (PHY) and medium access control (MAC) layer-related issues, only a small amount of work has been done on routing in CRAHNs. Routing in CRN can be further categorized into two types on the basis of spectrum knowledge [6]: full spectrum awareness and local spectrum awareness. In the full spectrum awareness category, each node already knows the spectrum availability knowledge. Routing approaches used in this category include graph-based, programming tools, and mathematical models. In the local spectrum awareness category, the spectrum knowledge is locally constructed at each cognitive node. Routing approaches used in this category include interference, power, link quality, delay, throughput, and probabilistic based.
Various delay-based or energy-based routing protocols have been proposed for CRAHNs. While, to choose the best route, the delay-based routing protocol takes into account end-to-end delays along a route, the energy-based protocol chooses a route in which the sum of the residual energies of all the intermediate nodes on the route is maximized. However, these protocols do not consider the delays and the nodes residual energies jointly in choosing the best route, which can significantly affect performance. Therefore, in this paper, we propose a new routing protocol named low-latency and energy-based routing (L2ER) protocol, which considers both delay and energy for routing decisions in CRAHNs.
The rest of the paper is organized as follows. Section 2 provides an overview of previous related works. Section 3 describes the proposed protocol in detail. In Section 4, we provide the simulation results and analysis and finally the conclusions are presented in Section 5.
2. Related Work
Different types of routing protocols are proposed for CRNs. Cheng et al., in [7], propose a delay aware routing metric, which takes into account different types of delays, such as switching delay and backoff or medium access delay, and a route with the minimum metric value is selected for routing. The authors in [8, 9] improve the concept of the delay metric by including a queuing delay to make it more efficient. Like the method in [7], delay motivated on-demand routing protocol (DORP) in [8] and a protocol proposed in [9] select a route that experiences less delay in comparison to the others. Furthermore, Yang et al., in [9], suggest a local coordination scheme to redirect or accumulate the incoming flow. The intermediate node redirects the traffic to its neighbor nodes, instead of forwarding it to the same node. It is proved that the scheme is useful for load balancing at the relaying nodes. Huisheng et al. [10] propose a new routing protocol for CRNs. This protocol uses a single transceiver for transmitting both control and data packets and it selects a path based on the delay metric. However, none of the aforementioned protocols utilize energy-related factors, which are essential to prolong the network lifetime.
A few routing protocols such as [11, 12] consider energy-related factors, so they select routing paths that are more energy efficient, as compared to the others. Kamruzzaman et al. [11] propose an energy-based routing protocol for CRAHNs, named spectrum and energy aware routing (SER) protocol. In this protocol, the higher energy efficient paths are selected during the routing mechanism, which increases the lifetime of the overall networks parallel to that of the individual CR user. Rishiwal et al. [12] introduce a power aware routing (PAR) protocol that increases the lifetime of the network and minimizes the consumption of energy during routing. While the protocols in [11, 12] utilize energy information on the routes and nodes, the delay is not considered to find the appropriate routes over CRAHNs (hereinafter, in energy-based routing protocol, energy means residual energy of node).
In [13], the authors propose a new distributed dynamic routing protocol to avoid interference with the PUs. In this protocol, the cognitive pilot channel (CPC) is issued to access the information about PUs. Caleffi et al. [14] propose a new routing metric named optimal primary-aware route quality (OPERA), which simultaneously considers both Dijkstra and Bellman-Ford-based routing strategies. Liu et al., in [15], proposed a novel protocol, opportunistic cognitive routing (OCR), which improves routing performance by allowing users to discover local spectrum access opportunities and using geographic location information. In [16], the authors propose a new routing protocol that is based on fuzzy logic which depends upon the signal strength of antenna and nodes energy. It selects the appropriate path for routing by choosing best neighbor for transmission.
3. Proposed Protocol
3.1. Problem Scenarios
While research on CRAHNs has focused primarily on a single-hop scenario, some work has also been carried out in the area of multihop CRNs. In comparison with traditional wireless networks, routing in multihop CRAHNs faces the following challenges.
In multihop CRAHNs, the available channels for each node are not static (dynamic changes).
In multihop CRAHNs, a deafness problem occurs when two consecutive nodes switch to another channel at the same time.
When PU activities are detected, which action should be performed by the SU to avoid interference with PU transmissions?
Since CRAHNs are dynamic in nature, there is a need for a mechanism that can exchange the exact information about the spectrum opportunities (SOPs) during routing.
In multihop CRAHNs, CR nodes switch from one channel to another to avoid interference with PU transmissions; therefore, different types of delay occur in the routing path.
Due to the PU spectrum usage, inconsistency in the SOPs makes the routing complicated in CRAHNs.
Dynamic CRAHNs produce many challenges (such as exchanging control information, route stability, and channel synchronization) to the design of routing protocols and algorithms.
In multihop CRAHNs, the relaying nodes, which handle multifrequency traffic, are easily bottlenecked in neighborhood regions.
As compared to traditional wireless networks, routing in CRAHNs becomes challenging due to its dynamic nature, as SOPs change hop-by-hop. Routing becomes inefficient when the nodes considered in routing have less energy or experience long delays. We can further explain these problems in routing through the following scenarios.
3.1.1. Energy Problem
CRAHNs have different limited energy devices, so node energy is an essential factor to be considered in the network. In the network, devices communicate through ad hoc protocols; due to limited battery power, the failure of one device degrades the network performance and efficiency, as shown in Figure 1.
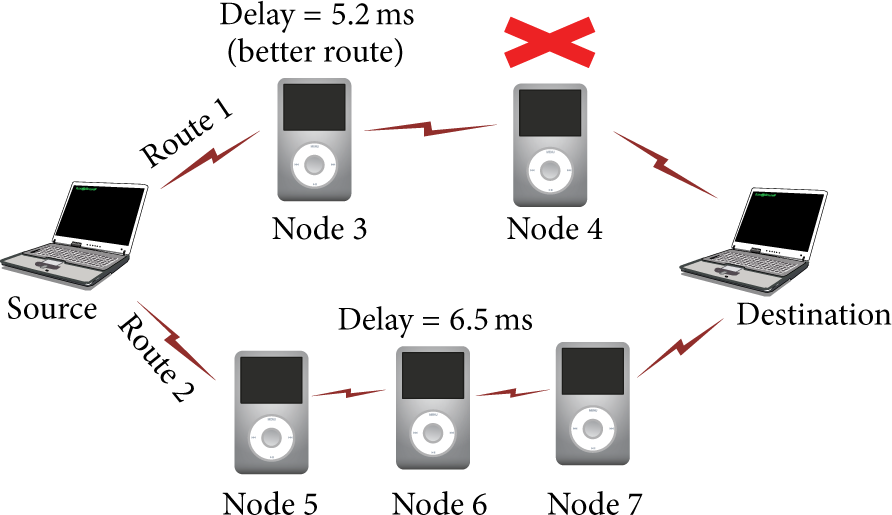
Problem scenario 1.
In Figure 1, a source node S wants to send a packet to destination D. S has two routes to the destination. The delays on route 1 and route 2 are 5.2 ms and 6.5 ms, respectively. According to delay-based protocols, route 1 is considered better. Consequently, route 1 is chosen because of the less delay. However, the problem is that the protocol does not consider the energy of the nodes. If node 4 has less energy and will die after sending a few packets, this route becomes invalid and selecting this path for routing causes degradation to the network performance and routing becomes inefficient.
3.1.2. Delay Problem
Similarly, routing becomes inefficient when a route is nominated based on only the remaining energy of the nodes. We elaborate on this problem in Figure 2, in which source S wants to communicate with destination D and it has two routes to D. The nodes energy is also mentioned, along with each node in terms of joules. Route 1 is more energy efficient, as compared to route 2, and energy-based protocols, thus, select route 1 for communication. However, the problem is that these protocols do not consider different delays along the path. Therefore, routing becomes inefficient if route 1 experiences more delay, as compared to route 2.

Problem scenario 2.
3.2. Motivation
Due to limited battery power in CRAHNs devices, if a route with the shortest end-to-end delay is selected, regardless of the residual energies of the nodes, some nodes on the route may die eventually soon and, consequently, the route will not be sustainable for a length of time and rediscovery processes are frequently required. Therefore, selecting the route without considering the residual energies on the nodes degrades the network throughput and efficiency. On the other hand, if routing protocols consider only the residual energies of the nodes on the route, the route may need lengthy end-to-end delays. As mentioned in Section 2, various delay and energy-based routing protocols are proposed for CRAHNs. However, based on our research, no existing routing protocol for CRAHNs utilizes both of these factors. Routing protocols become more efficient in CRAHNs when delay and energy factors are considered together to find a route.
Therefore, from this perspective, in this paper, we propose L2ER, a novel protocol for CRAHNs. Although L2ER is based on the well-known ad hoc on-demand distance vector (AODV) routing protocol in [17], it is enhanced to cope with CR environments and to simultaneously utilize both delay and energy factors to find an efficient route over CRAHNs.
3.3. L2ER Protocol
L2ER is an on-demand and reactive protocol that considers both delay and energy along the route. Due to dynamic and heterogeneity environments in CRAHNs, L2ER protocol chooses the spectrum and the route jointly. In contrast with many other proposed protocols, a single radio is used for both control and data messages, because an extra radio on each cognitive user requires additional cost. Therefore, L2ER protocol is implemented in CRAHN systems which is not using common control channel (CCC) because in CRAHNs channel availability is dynamic so dedicated CCC based approach is not a suitable approach in this dynamic environment. In L2ER protocol, all cognitive nodes have to maintain an energy threshold,
3.3.1. Protocol Formulation
Packet traveling from source to destination includes different types of delays such as switching, medium access, and queuing. The delay at ith node called path delay

where

where

where

3.3.2. Message Format
A new message, named L2ER route request (L-RREQ), is proposed for L2ER operations. L-RREQ is based on route request (RREQ) message of AODV protocol but includes some more fields comparing to the AODV protocol message formats. Figure 3 shows L-RREQ message format. L-RREQ message contains two additional fields to RREQ message of AODV protocol as follows. Timestamp field contains the current time when source node originates L-RREQ; path energy field,

L2ER route request message.
3.4. Protocol Operations
The proposed protocol performs an on-demand spectrum-aware route discovery process. It is an on-demand protocol because only when two nodes want to communicate with each other, the process to find appropriate route to a destination is initiated like AODV protocol. When a sender has a packet to transmit to destination, it broadcasts a L-RREQ message to all of its neighbor nodes, which forward this message onward until it reaches a destination. The proposed protocol is spectrum-aware protocol because, in L2ER protocol, each node has information about SOP that represents the unused part of the spectrum which is also called “spectrum hole” [2]. The SOP contains free-channels that are not used by other SU. Although, in this paper, we do not take into account the primary user activity, in spite of this, L2ER receives free or non-free-channel information provided by MAC layer. In this paper, under the assumption that all participating nodes find out regarding PU activity free-channels using some methods proposed in [18, 19], we focus on finding the best route taking into account both path delays and residual energy along the route. The initial route discovery process is explained as follows.
Step 1. Firstly, a node using L2ER protocol creates a new L-RREQ message.
Step 2. Initialize the different parameters of L-RREQ message such as by setting Timestamp and
Step 3. After initialization of the fields, the L-RREQ message is broadcasted to neighbor nodes.
Figure 4 illustrates the initial route discovery process.

Process for initial route discovery.
3.4.1. Process for Handling L-RREQ Message
Handling of L-RREQ message can be explained in the following steps.
Step 1. When a node receives the L-RREQ, firstly, it checks if it is a L-RREQ message.
Step 2. In case of L-RREQ, the node evaluates if it receives its own L-RREQ message. If yes, then discard that message.
Step 3. In the next step, it checks if it is a destination node for the message.
Step 4. If it is not, node checks if its residual energy,
Step 4-1. Energy status is updated by adding current node energy,
Step 4-2. The node selects the appropriate channel that has experienced less interference by using SOP information.
Step 4-3. Forward the L-RREQ to next neighbors’ nodes.
Step 5. If the node receiving the L-RREQ message itself is the destination of the message, it checks if the received L-RREQ message is the first L-RREQ from same source node.
Step 6. In case of first L-RREQ message from the source, it sets a timer on. The proposed protocol accepts subsequently received L-RREQ messages only while the timer is not expired.
Step 7. While the timer is on, the destination receives multiple L-RREQ messages along different routes and L2ER protocol decides the best route after collecting multiple L-RREQ messages arriving from different routes. That is, the timer is used to limit a period to receive L-RREQ messages. Whenever receiving L-RREQ message before the timer is off, it evaluates different parameters with previous received L-RREQ messages as follows.
Step 7-1. Sequence number,
Step 7-2. The destination node evaluates the routes based on proposed cumulative metric in (4).
Step 7-3. In the next step, it updates the routing table and follows the same procedure for next L-RREQ messages until the timer is expired.
Step 8. After the timer expired, the destination node selects the best route based on the latest routing table information which gives us more accurate and stable route in respect of both energy and low latency perspective.
Step 9. In the end, it sends a unicast route reply (RREP) message back to the source.
A flow chart of handling L-RREQ is shown in Figure 5.

Process for handling L-RREQ message.
3.4.2. Process for Handling RREP Message
When a node receives RREP message, it follows the process below.
Step 1. If a node receives the RREP message, it checks if it is the source itself. If yes, the source starts transmitting data to destination.
Step 2. Otherwise, the intermediate node selects the suitable free-channel for transmission by using SOP information.
Step 2-1. It forwards the RREP message back to the next neighbor node based on the routing table.
The process of handling RREP is shown in Figure 6.

Process for handling RREP.
4. Performance Evaluation
The summary of the simulation parameters is shown in Table 1. Simulations are performed in Network Simulator-2 (NS-2) [20] and to make NS-2 support cognitive radio we are using the same procedure proposed in [18].
Simulation parameters.
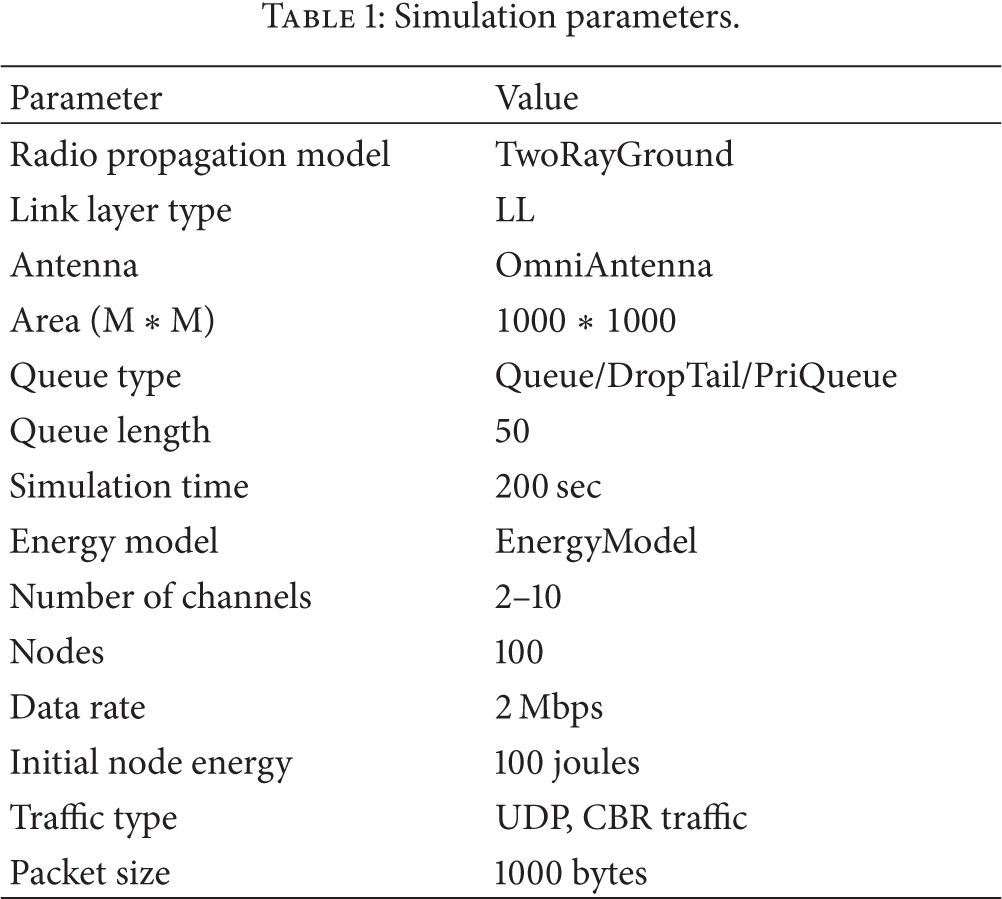
Simulations are performed in 10 × 10 grid topology with three source-destination pairs. Results are obtained from 10 times simulations and each simulation case is performed for 200 seconds. Energy of each CR node is initially set to 100 Jules. The energy used for transmitting a packet is set to
As mentioned in Section 2, DORP is a delay-based protocol for CRAHNs that selects route on the basis of delay metric while SER protocol is based on minimum energy status of intermediate nodes along a route. Even though the proposed protocol considers both delay and energy factors together for choosing a route, based on our knowledge, no protocol for CRAHNs considers both factors together up to now.
4.1. Simulation Results
In Figure 7, we compare the average end-to-end delay of L2ER protocol with those of other protocols as a function of the number of nodes. As shown in Figure 7, the average end-to-end delays of all protocols increase as the number of nodes increases. However, increasing ratio of average delay using L2ER protocol is comparatively low. L2ER protocol performs the maximum 1.4 and 9 times better than DORP and SER protocol, respectively, because L2ER protocol selects the most efficient route in terms of both delay and energy. L2ER protocol selects a route in terms of residual energy of intermediate nodes; the route has relatively low probability that some parts of the route are broken. Thus, L2ER protocol wastes less time for rerouting process. However, delay increases as the number of nodes increases from 80 to 100. The reason of this is because too many nodes are participating in the communication and as consequence, less quantities of free-channels are available for transmission. In addition, L2ER also selects appropriate channel for transmission which is not occupied by other users and due to lack of free-channels its delay becomes high. DORP performs better than SER protocol because it takes into account the end-to-end delays along with routes in order to select the best route. However, when the number of nodes increases from 60 to 80, average delay of DORP sharply increases because of inefficient energy routes. Such inefficient routes cause link breakages often and as a consequence delay increases to perform rerouting processes. However, because L2ER protocol chooses a route in which more energy is left in all the nodes of the route, it has lower delay than DORP. SER is energy-based protocol which does not take into account any route delay issue, so that routes can be selected even though the routes experience long delays. Consequently, the average delay performance of SER is the worst among three routing protocols.

Average end-to-end delay as a function of the number of nodes.
Figure 8 shows average end-to-end delays of three routing protocols as a function of the number of channels. Initially, L2ER protocol delay is slightly higher than DORP. However, the end-to-end delay of L2ER protocol becomes the same as compared to DORP as the number of channels increases. Since SER protocol is energy-based protocol without considering any delay-related factors, it experiences the longest delay. In case of channel 8, the end-to-end delay of SER protocol becomes very high because it selects the path regardless of delay.
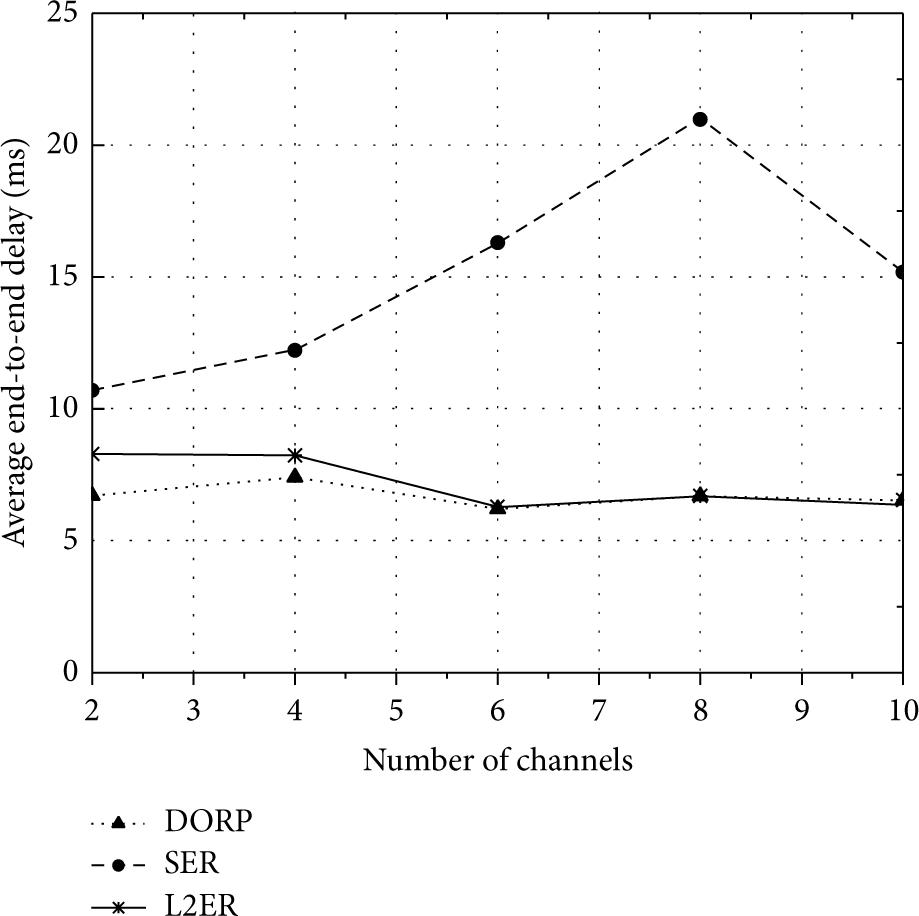
Average end-to-end delay as a function of the number of channels.
We also evaluate the performances of all protocols in terms of the average throughput during simulations as a function of the number of channels as shown in Figure 9. L2ER protocol performs better than the remaining ones as the number of channels increases. At channel 6, L2ER protocol has less number of interference free-channels as compared to channel 4. That is why at this point, its throughput decreases because available channels are used by other users. Although DORP chooses delay efficient route, it does not perform better than L2ER. This is because routes selected in DORP are not efficient in terms of total residual energy of the route. Therefore, nodes on the selected route die sooner or later after forwarding some packets which degrade the performance. Similarly, in case of SER protocol, it does not take into account any delay-related issue, so that is why both protocols do not perform better as L2ER does.
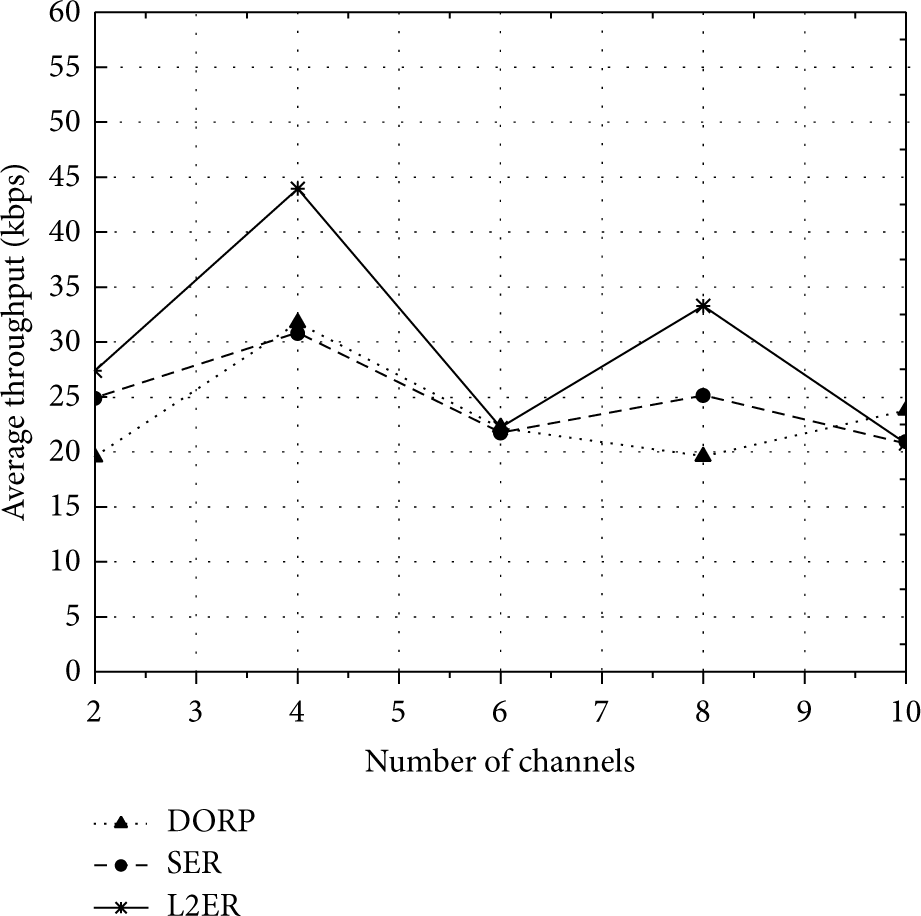
Average throughput as a function of the number of channels.
In Figure 10, we compare the packet delivery ratio of L2ER protocol with those of other protocols as a function of the number of channels. Packet delivery ratio of L2ER is comparatively better than others because L2ER protocol performs efficient routing by considering both delay and energy factors together. On the other hand, DORP selects the routes without considering residual energy of intermediate nodes. As a consequence, broken-routes frequently occur so that some packets are lost or dropped during searching new route. However, SER protocol selects a long route which is efficient in terms of energy but not in delay perspective. It increases delays so that packets are dropped due to lifetime expiration. On the other hand, since L2ER protocol takes into account the residual energy of intermediate nodes or a route, its route is more reliable than others, so that it reduces the number of dropped packets.

Packet delivery ratio as a function of the number of channels.
Figure 11 shows the performances of the protocols in terms of the average number of exhausted CR nodes, which can reflect the whole network lifetime. The exhausted nodes are defined as nodes that consume all their energy during simulations. Therefore, higher number of exhausted CR nodes can reflect less network lifetime. When the number of nodes increases, the quantity of exhausted nodes in L2ER protocol is less as compared to DORP because L2ER protocol selects route based on the combination of delay and energy. On the other hand, since DORP does not take into account any residual energy of the nodes along the route, DORP has the highest number of exhausted CR nodes. Even SER protocol has a larger number of exhausted nodes than L2ER protocol does as the number of nodes increases from 80 to 100 because SER protocol can select a long route. Therefore, it consumes more energy at more nodes for the transmission of data. On the other hand, L2ER protocol has the lowest number of exhausted nodes at this point because it selects the best route which is efficient in every perspective. Furthermore, since in L2ER protocol any intermediate nodes with less energy than

Average exhausted nodes as a function of the number of nodes.
5. Conclusions
An on-demand and reactive protocol, named L2ER, is proposed for CRAHNs. Unlike other protocols selecting a route based on a part of factors affecting routing, L2ER protocol has two characteristics: firstly, it selects channel and route jointly; secondly, it selects an efficient route that takes into account both delay and energy together along the route. Simulation results show that L2ER protocol performs better than other existing protocols in terms of average end-to-end delay, throughput, packet delivery ratio, and number of exhausted nodes.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (NRF-2013R1A1A2005692).