
Abstract
Robustness and energy efficiency are critical for sensor information system, in which an abundance of wireless sensor nodes collects useful data from the deployed field. The chain-based protocols (like PEGASIS (Lindsey and Raghavendra, 2002)) are elegant solutions where sensor node has high energy efficiency. Unfortunately, if one node in the chain is failed due to some reasons such as energy exhaust, then the information cannot be forwarded to the sink. To improve system robustness and balance the energy consumption, this paper proposes a robust and energy-efficient data gathering (REEDG) approach, which is an improvement over the chain-based and grid-based network structures, in sensor information collecting system. In REEDG, data gathering is executed by a data transmitting chain which is composed by a series of virtual grids. Each grid communicates only with its neighbor grid and takes turns transmitting the information to the base station. Furthermore, an adaptive scheduling scheme is proposed to trade off energy consumption on each node and data forwarding delay. Experimental results show that, when compared with state-of-the-art approaches, REEDG achieves network lifetime extension of at least 13% as measured in terms of 20% dead nodes and improves the data transmission ratio at lowest 24% as 20% nodes fail.
1. Introduction
Information collection is one of the most important applications of wireless sensor network (WSN) which consists of a large amount of small, low-cost, and wirelessly connected sensor nodes deployed in an unattended natural environment. In an information collection system, the sensor nodes collaboratively monitor the natural environment in the area of deployment and gather the sensed data such as audio and seismic. Since the sensor nodes are usually battery-powered and have a limited lifetime, it is infeasible to replenish energy via replacing their battery after deployment. Thus, both energy efficiency and robustness are the critical issues in the design of information collection WSN.
For the data collection and gathering, the simplest approach is that all the nodes send their data directly to the sink. Since the sink is always located far away from the deployment area, the transmitting energy from any node to the sink is high and nodes will drain out quickly. Therefore, some improved approaches are proposed to reduce the transmission data flow to the sink as few as possible. Clustering (such as LEACH [1]) is one of the energy efficient approaches for data gathering. In clustering WSN, cluster head is responsible for the data gathering from its members. However, if sensor nodes report their data to the respective cluster head, more than one cluster head is involved to transmit data to the sink, leading to multiple data transmission flows toward the sink. Moreover, the structure of cluster needs to be reformed periodically. To improve it, chain-based approaches (like PEGASIS [2]) are proposed. In chain-based data gathering, all nodes are organized into a chain by using a certain algorithm and then take turns to act as the chain leader which is responsible for forwarding the aggregated data to the sink. These approaches outperform the cluster-based approaches by eliminating the overhead of dynamic cluster formation and minimizing the number of long-distance transmissions. Unfortunately, by using the chain-based protocols, the robust problems arise. If a node in the chain dies, the sensed data cannot be forwarded to its downstream neighbor until the chain is reconstructed. In that case, the sensed data cannot arrive at the sink in time and the energy dissipation required for frequent reconstructing the chain is high. Hence, none of the hierarchical nodes arrangement has achieved all goals of data gathering, high energy conservation, and high robustness.
To address these problems and achieve the aforementioned goals, we propose a robust and energy-efficient data gathering (REEDG) approach for information collecting WSN. In REEDG, the entire sensing field is first divided into virtual grids by using a certain algorithm. The virtual grid structure is geographically formed and it does not change over time. For example, this structure is well applied in the literature [3–5]. After that, each grid is regarded as a unit to form a data transmitting chain. One node in a grid takes the role of collection leader (CL) that gathers the sensed data from its grid members and it take turns to act as the transmitting chain leader in order to forward the aggregated data to the sink. For each round, every CL receives the data from its grid members and upstream neighbor CL and then passes its aggregated data via its downstream neighbor CL until the designated chain leader. Each grid is regarded as a chain member; thus one node dies, and another one in the same grid is selected to replace the role of the previous one, so that the structure of the chain does not need to be restructured. As a result, it reduces the energy consumption of chain constructing so as to prolong the network lifetime. Furthermore, an adaptive sleep scheduling is proposed to keep a minimal number of sensor nodes active and guarantee the performance of data gathering. In data collecting, it is not necessary to have sensor nodes active all the time. Instead, waking up nodes which have sensed data to transmit and putting the other nodes into sleep mode are an efficient way to save energy. In summary, the contributions of this paper are three-fold.
An efficient data gathering approach is proposed. A virtual grid instead of one single node is used to form the transmitting chain. In this way, the sensed data can be well aggregated on each CL and only one data flow along CLs is transmitted to the sink. After the data transmitting chain forming, the network structure does not need to reform during the data gathering period. A network combining the grid-based and chain-based framework is built. By considering the whole grid as a chain member, any sensor node in the same grid can play the same role in the transmitting chain when the previous one dies so that data gathering is not affected by the failure of some nodes. Adaptive sleep scheduling scheme is proposed to allow different grids having independent sleep schedules to maximize the sleep time of nodes. Moreover, the collaboration is established among grids leading to less communication cost because the control packets are just sent among CLs instead of all the nodes.
The rest of this paper is organized as follows. Section 2 gives an overview of related work. In Section 3, the system model is stated. Then, Section 3 presents the proposed approach in detail. The experimental results are shown in Section 4. Finally, we conclude the paper in Section 5.
2. Related Works
To achieve energy-efficient and robust data gathering, some approaches have been proposed one after another. The data gathering techniques vary with different network architectures. In general, there are mainly four network architectures for data gathering. They are cluster-based, tree-based, chain-based, and grid-based networks [6].
For cluster-based WSNs, a typical and classical data gathering scheme is LEACH [1], in which the network is divided into a few clusters and only cluster heads send the aggregated data to the remote sink directly. Moreover, TDMA is utilized to minimize channel contention. Although LEACH achieves the energy efficiency to some extent, the cluster structure needs to be reformed periodically to prevent the early death of cluster heads, which consumes much energy. After LEACH, many improved cluster-based protocols have been proposed for such applications. In [7] an adaptive scheme is proposed to control the degree of data aggregation with respect to the reliability requirement. In [8, 9] the authors propose to build a hierarchy for all clusters by flooding in a typical route discovery process [8] or by using a greedy heuristic [9]. The sensed data are first aggregated on cluster heads at the lowest level. Then the aggregated data are sent to a higher-level cluster head for further aggregation. In [10], the authors propose to aggregate sensed data hop by hop through a multihop path. Using this scheme the route must be established in advance. However, the way of data gathering is not robust because the sensed data cannot be collected if cluster head failed. In all cluster-based approaches the cluster hierarchy needs to be reformed periodically and dynamically. Moreover, the similar sensed data are always sent to different cluster heads not to facilitate data aggregation.
A tree can be simply used to organize the nodes of a sensor network into a hierarchy. For tree-based WSNs, TAG, for instance, is a good representative of this kind of schemes [11]. Nodes in TAG are logically organized into levels depending on their distance to the sink so that a transmission from the leaf nodes to the sink is completed within an epoch. Unfortunately, using a tree brings a high probability of disconnections in the network because the closer the distance between the node and the sink is, the heavier the workload of the node is. An obvious solution would be retransmitting lost data using alternative paths. Multipath-based approaches are proposed in several works [12, 13]. Each node is allowed to have more than one parent and to exploit all of them during data gathering phase. These approaches are obviously more robust and under certain assumptions it may be not much more energy intensive than the single path one. However, since each node has more than one parent, there is duplication of information at each level, which makes it difficult to implement duplicate sensitive aggregation function, such as computing the average or the count.
For chain-based WSNs, PEGASIS is an improved data gathering protocol. It further decreases the consumed energy by minimizing the transmission distance among sensor nodes. After PEGASIS, chain-based sensor networks have been used widely in recent works [14–18]. Jung et al. proposed an enhanced PEGASIS [14], in which the sensing area is circularized into several concentric levels. For each level, a chain is constructed based on the greedy algorithm. PEGASIS slightly improves the redundant transmission; however, since the distribution of sensor nodes is not even, the transmission distance between two chain leaders in different levels might be lengthy, and the data transmission consumes more energy. In [15, 19], the main idea is to split the sensing field into a number of smaller areas in order to create multiple shorter chains to reduce the data transmission delay and redundant path. COSEN in [19] is efficient in the ways that it ensures maximal utilization of network energy and it takes much lower time to complete a round. However, for large sensing areas, the chain in each smaller area would still be lengthy. In [16], the authors propose an efficient localized chain construction (ELCC) scheme, which creates several chains for the topology using Voronoi tessellation. To construct a chain in a Voronoi cell guarantees that the summation of square of the distances would be the lowest. In [17], the authors focus on building a chain to get the minimum transmitting energy. In [18], the authors establish a chain in order to meet the requirement of the network coverage. Comparing with cluster- and tree-based architectures, the clear superiority of chain is that it is not necessary to reform the structure when the head node is changed. However, if all the nodes attend one chain, the sensed data are transmitted through a long and redundant path. If sensor nodes form more than one chain, the data aggregation among chain heads is not facilitated to implement. Furthermore, the network does not have high robustness. If one node in a chain dies, the chain structure has to reform.
For grid-based WSNs, TTDD algorithm [20] lets sensor nodes at the grid points (called dissemination nodes) forward the data. The sink issues a query for the data. The query is further propagated only by the dissemination nodes and the source responds back through the reverse path. However, considerable overhead would be involved in the dissemination nodes. A variant of TTDD is called energy-efficient data dissemination (EEDD) algorithm [21], in which the grid heads have to be frequently changed in order to maintain fairness for each sensor node. However, in existing grid-based network [3], the data of sensor node in each grid are transmitted by their own grid head through different path so that the sensed data cannot be efficiently aggregated among the different grids. In contrast, in our REEDG, each grid is regarded as a chain member so that the sensed data in different grids will be aggregated by transmitting through the chain.
3. System Model
3.1. Network Model
In this paper, we consider a static WSN which is composed of one sink and p randomly distributed sensor nodes The sink is fixed and located far from the network. It has an infinite power supply and gathers data from the sensing field. The distribution of sensor nodes is mutually independent. Every node is homogeneous and energy constrained. Each node knows its position by any localization algorithm (such as [22]). Let Data collection is periodical from the network. In each round of communication, each sensor node has a packet to be sent to the sink.
3.2. Energy Consumption Model
We adopt a very widely used energy model [1, 4, 18] as described in Figure 1.



Energy consumption model of the radio.
4. Robust and Energy-Efficient Data Gathering
Our idea is based on a hybrid network structure, in which the working process can be divided into three stages, network building, data collection, and network maintenance. In network building stage, the network is initialized to form a grid-based network structure and the data transmitting chain is built. Then in data collection stage, sensing data are collected along the chain. Each grid has adaptive schedule and plays a role of chain head in turn. At last, network maintenance includes grid maintenance, new nodes addition, and dead nodes exit. The following subsections present the working process of the proposed approach in detail.
4.1. Network Initialization
Initially, the network is organized as in Figure 2, in which the whole sensing field is divided into q small equal size grids


Illustration of a grid structured sensor network.
Usually, the sensing range of node

Three node roles transferring.
We assume that all nodes have location information about the nodes in their neighbor grids. If not, our proposal still works, and nodes can obtain the information by communicating with each other. Let

Furthermore, each node can adjust transmission power based on its undertaken role. Nodes can estimate its transmission range


4.2. Selecting Collection Leaders
All the sensor nodes start with CM and the transmission range of nodes are set as


(1) (2) (3) node (4) t = T( (5) wait (t) (6) (7) broadcast (“req_CL”) (8) keep (active) (9) (10) (11) cancel wait () (12) (13) (14)
4.3. Data Transmitting Chain Forming
When selecting CL finishes, sensor nodes adjust their sleep state, transmitting range, and power based on their roles. CM nodes can get into sleep and wake up after a time period. Then, the transmitting chain is constructed by CL nodes. According to the energy consumption model discussed in Section 3.2, to reduce the energy consumption in data transmitting we should shorten the distance between nodes or decrease the packet size. The data packets can be aggregated when they are transmitted through the chain to achieve energy saving. Moreover, the total cost of sending data throughout the chain depends on the distance

(1) (2) n = 1 (3) (4) (5) Min_V = Max_V (6) (7) (8) (9) (10) Min_V = (11) next = j (12) (13) (14) Insert (CHAIN, (15) n = n + 1 (16)

Data transmitting chain in sensing field.
From the line 7 in Algorithm 2, we can see that the grids which are the neighbors of the current chain are just considered instead of all the grids when choosing the new grid to add to the chain. Since the grids are distributed by the geographical location, it is impossible that the minimum increase of
4.4. Data Gathering through a Data Transmitting Chain
After data transmitting chain forming, the network starts to collect information of the sensing area. The CH passes the control message through the chain to initiate the data transmission from the ends of the chain. The control message is just transmitted among the CLs instead of all nodes and it is just transmitted one time in a period of CH lifetime. Therefore, the control message costs very small. In each data collection round, CM reports sensed data to its CL in each grid at the time slot they negotiated. When the CL in the ends of the chain receives the control message from CH, it sends the aggregated data of its own grid to the downstream neighbour CL in the chain so that the sensed data is forwarded to CH along the opposite direction of the control message. Moreover, the sensed data are aggregated at every CL. Each CL aggregates its grid's data with the received data from its upstream CL to generate a single packet of the same length. At last, CH sends the aggregated data to the sink. Figure 5 takes a part of network from Figure 4 as an example. In Figure 5,

Data transmitting chain in sensing field.
Since the radio module is the most energy consuming part in a sensor node, the nodes which do not need to send data should shut off their radio and go into sleep state. In this paper we propose an adaptive sleep scheduling scheme based on the data transmitting chain for the information collection system. Each grid has different sleep scheduling and the global synchronization is not required. The timeline of the information collection is shown in Figure 6. CH assigns time slots for CL in every grid by the control message passing in order to send data along the chain by CL. The time period of a data collection round is assumed as

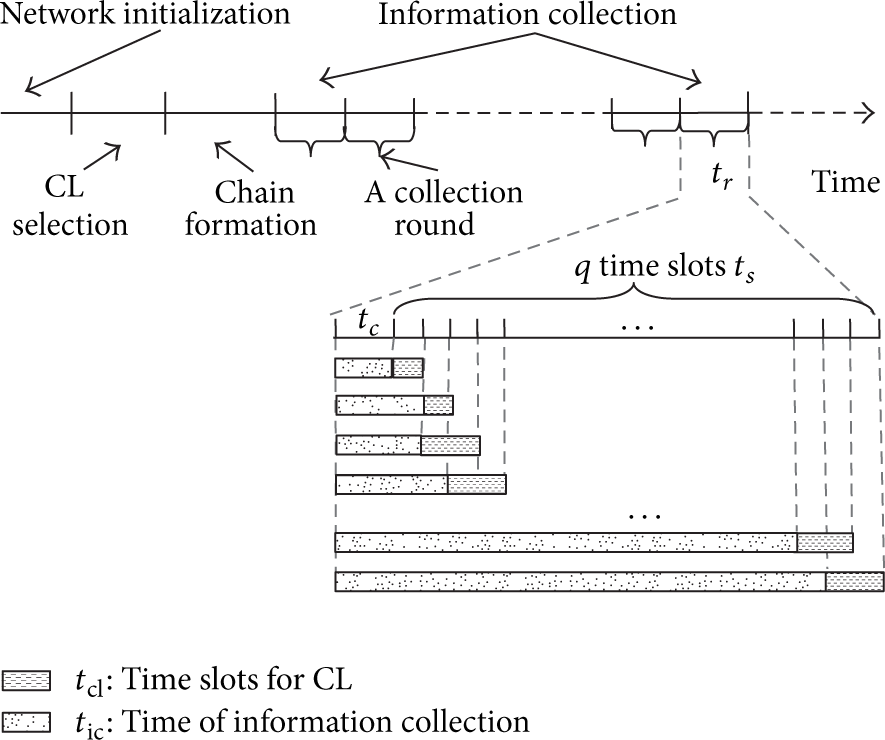
Timeline of the information collection sensor network.
In order to balance the energy consumption, grids take turns playing the role as CH grid (


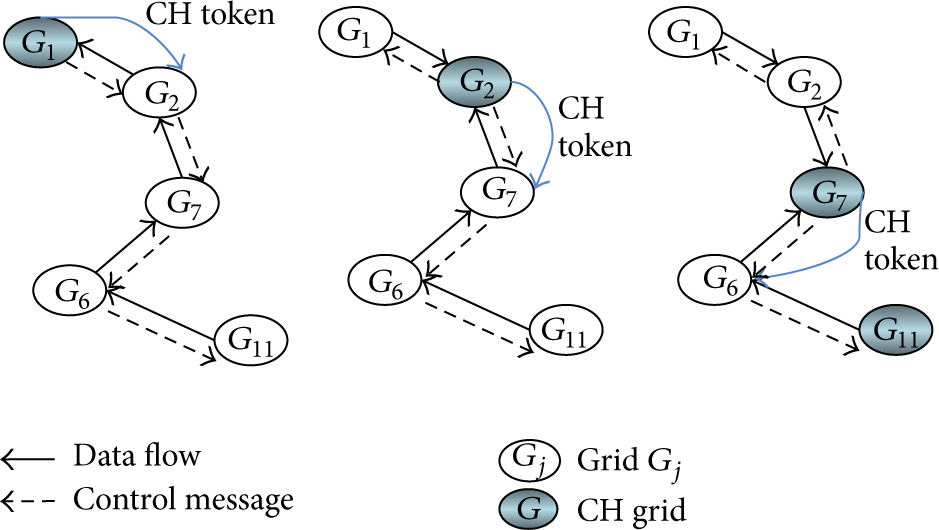
CH token passing through the chain.
When grids receive the control message from the CH, CLs in the grids adjust the sleep state for their CMs and send the aggregated data in the assigned time slot. Each time CLs send data, they set
4.5. Grid Maintenance and Robustness Analysis
To avoid excess energy consuming on CL, a lifetime of CL collecting data from its CMs is set in the CL announcement message when broadcasting it to its CMs. The

For any WSN, it is critical to handle unexpected sensor nodes failures for robustness. In REEDG, instead of one sensor node, a whole grid is employed as a member of the transmitting chain. All the nodes in a grid play a role as CL in turn. In one time instant, CL responds for the data transmitting along the chain. When a CL fails, the other nodes in the same grid with the CL take the place of the current CL to collect and transmit the sensed information. The CM which replaces the current CL is chosen according to its residual energy. When CMs do not receive the answer message from their CL for a time threshold
Furthermore, in REEDG, the updated control message is triggered and passed though the chain when a CH grid changes. Every node in CH grid can play as CH and the control message does not need to be updated during the grid lifetime as a CH grid. Compared with a single node as CH, which frequently refreshes control message when head node changes, REEDG reduces the number of control messages so as to conserve the scarce energy supply of sensor nodes.
4.6. Energy Consumption and Delay Analysis
This section presents the theoretical analysis of energy consumption at CM, CL, and CH nodes, delay during cluster formation, and energy consumption during data transmission.
4.6.1. Energy Consumption
On Chain Formation. In both PEGASIS and the hierarchical chain-based scheme, nodes need the global location information of all the nodes to form a chain. When a new node will be added to the chain, the protocols need to find out the node, which is nearest to the current CH or which adds the minimum
On CM. Our data transmission scheme always guarantees that CMs send their data to CL in their own grid so that the transmission distance is relatively small as it is in other chain-based approaches. Moreover, CMs do not aggregate data in REEDG due to data aggregation at CL. Since the information from the same grid is always related, data aggregating by CL is more efficient. Also, CM is just active to send data at the time instant negotiated with its CL and gets into sleep in the other time to save energy.
On CL. In REEDG, although CL spends more energy than CM due to sending aggregated data to the neighbor CL, CL is rotated in a grid and the node which has the most residual energy takes the role of CL each time, which balance the energy consumption on every node. If any CL fails, the other nodes in the same grid with the CL will replace it and the chain structure does not need to reform. Reducing the frequency of reforming of the chain implies reduced energy consumption and improved robustness in REEDG as compared to PEGASIS and the hierarchical chain-based scheme.
On CH. The energy consumed in transmitting the data from CH to the sink is the same in both PEGASIS and the hierarchical chain-based scheme, since they directly transmit aggregated data to the sink. In our approach, each node can be CH different times according to its location and residual energy so that the node near to the sink takes the role of CH more times than the node far away from the sink. Therefore, the energy consumption is well balanced on each node and this algorithm controls the data to flowing toward the node near to the sink.
4.6.2. Data Collection Delay
Another important issue in information collection WSN is data collection delay. In case of PEGASIS, a chain for data transmitting is constructed by all the nodes. During each round, a node takes turn to collect and send data to the sink. If approximately

In the hierarchical chain-based scheme, such as COSEN and ELCC, the data collection delay depends on the number of the network layers. If the network is divided into

In this scheme we take a network of
In REEDG, the data collection delay can be estimated as follows:



5. Performance Evaluation
To evaluate the performance of the proposed approach REEDG, we implement the simulations using Castalia, which provides realistic channel models, radio models, and MAC layer protocols based on OMNet++4.1 [5, 23]. We also compare our simulation results with PEGASIS, COSEN, and ELCC in terms of total energy consumption, average data collection delay, network robustness, and network lifetime.
5.1. Experiment Environment
We assume that there are 256 sensor nodes distributed randomly over an area of 200 m × 200 m and a fixed sink node located at (100, 600). The network is divided into 16 grids. We also assume each node has an initial energy of 1.5 J (Joules). The values for energy parameters adopted in our simulations are the same as that used in PEGASIS and ELCC; that is,
For CL selection, we set
5.2. Simulation Results
Figure 8 shows the comparison of the energy consumption of network initializing and chain forming. It is shown that the amount of energy consumed in PEGASIS and COSEN is approximately the same since they both adopt the same chain forming approaches, greedy algorithm. The energy consumption in ELCC is smaller than that in PEGASIS and COSEN because several chains are constructed in small areas in ELCC and the nodes do not need to communicate with distant nodes to get their information. REEDG consumes the least energy for chain forming because in each grid only CL attends in the process of chain forming and each time CH just communicates with the neighbor grids of the current chain to choose the next grid to be added to the chain.

Energy consumption of network initializing and chain forming.
Figure 9 shows the comparison of the time delay of network initializing and chain forming. The time delay of chain forming in ELCC is slightly longer than the others because the network is divided into small areas in initialization and when every node adds into the chain it needs to calculate the minimum
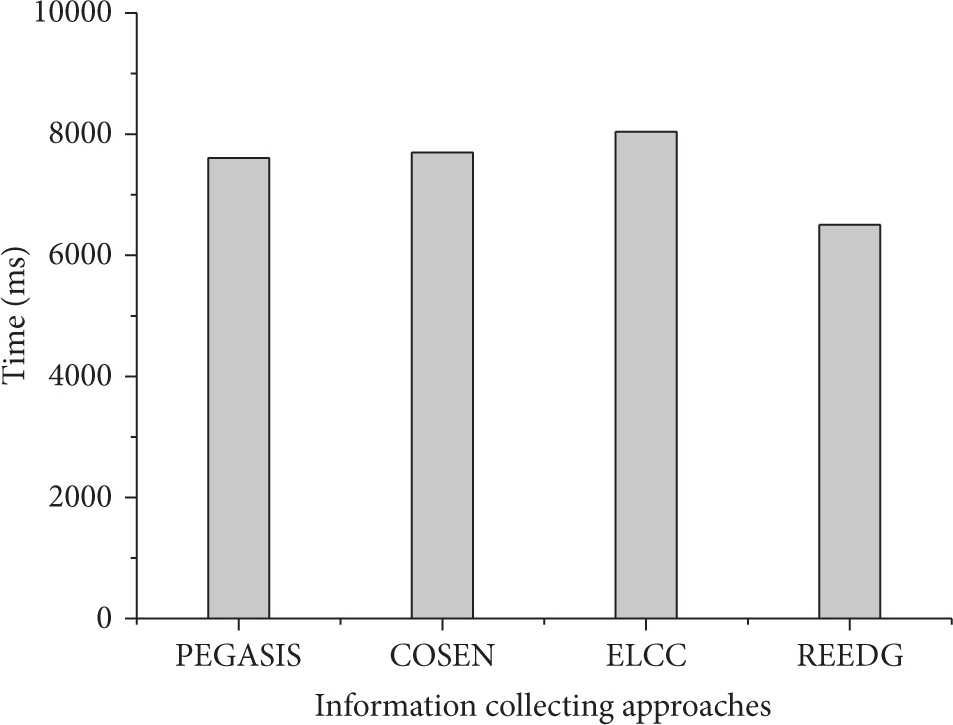
Time delay of network initializing and chain forming.
Figure 10 shows that average data collection delay changed with the number of the sensor nodes in the different approaches. The number of nodes is varied from 64 to 256. If the other parameters are fixed, the average delay increases when node density increases because more nodes create more data packets. The delay of PEGASIS sharp rises in pace with the nodes increasing and it has the largest time delay among these approaches because the chain is much too long with a large number of sensor nodes. REEDG achieves lower delays compared to the other approaches for all node densities because the length of the chain is shorter than others and data collection in each grid does not affect the time delay of the chain. The delay of COSEN and ELCC is shorter than that in PEGASIS because they divided the chain into several small chains to reduce the length of transmission chains; nevertheless, the delay is prolonged if the number of nodes is not even in each small chain.

Average time delay of the data collection.
In order to investigate the performance of system robustness, the experiments were carried out keeping the other parameters fixed and progressively increasing the number of node failures; specifically, the percent of node failure ranges from 0 to 50% of the total number of nodes. We set nodes failure in random position and averaged our results in each run since the simulation results are affected by the location of those nodes. Figure 11 shows data transmission ratio versus the percent of node failures for the different approaches. Not surprisingly, all the approaches obtain almost 100% transmission rate with 0 node failures and the success rate reduces with the increasing node failures. Remarkably, because one grid is regarded as the chain member and all nodes in the grid can relay data in REEDG, our approach is more robust and manages to deliver 31% of the packets sent, even with 50% failure rate. In the other approaches, the data transmission ratio drops to approximately 23% when half of the total number of nodes fails. When 20% nodes fail, REEDG improves the data transmission ratio at lowest 24%.

Data transmission ratio versus certain percent of node failures.
Figure 12 shows a chart plotting the average energy consumption on each node after 100 runs varies with respect to the node failure rate. Clearly it tends to increase, for all the approaches, since the chain needs to be reconstructed when node fails and fewer nodes participate in the data collection as the node failure rate increases so that the distances between the nodes become greater, and nodes have to become leaders more often. The curve representing average energy consumption on each node in REEDG, at first, shows a slowly increase because the data transmitting chain is not necessary to be reformed when a few nodes fail; later on, the average energy consumption increases quickly, since less and less nodes can be used due to the higher number of failures. Although the average energy consumption on each node also increases as the node failure rate keeps increasing, our approach still outperforms the other approaches.

Average energy consumption versus certain percent of node failures.
Figure 13 shows the total energy cost of the four approaches after several hundreds of rounds when 30% nodes fail. We can see that REEDG consumes less energy than that in the other approaches due to less communication cost for chain reforming. REEDG only reconstructs the chain when no node is alive in one grid. Moreover REEDG adopts the adaptive sleep schedule which allowed the radio of nodes sleep in the most of the time and only work when they need send data in order to save energy further. The total energy consumption of ELCC is smaller than that in PEGASIS and COSEN because it constructs small chain in local area and has the minimum sum of the square of transmission distance

Comparison of total energy consumption when 30% nodes fail.
Figure 14 plots the ratio of the previous two quantities, average energy consumption and data transmission ratio, and thus illustrates the energy efficiency (the energy cost of successful transmission of one packet). When there is no node failure, all approaches almost start from the same value, but the energy efficiency in PEGASIS and COSEN decreases quickly as the node failure rate keeps increasing. However, in REEDG the energy efficiency reduces slowly so that REEDG has higher energy efficiency in improving system robustness. Our approach manages to keep the energy consumption low and still maintains a remarkable degree of robustness at the same time.

Ratio of energy consumption to data transmission.
Finally, the last chart in Figure 15 shows the comparison of lifetime among PEGASIS, COSEN, ELCC, and our proposed algorithm REEDG. We can see that REEDG has the longest lifetime among these approaches. This is caused by the following reasons. (1) REEDG reduces the frequency of reconstructing the data transmitting chain when some nodes fail. (2) REEDG adopts the adaptive node sleep scheduling to save energy. (3) REEDG allows each node to take the role of CH different times according to the distance from the node to sink and the residual energy of the node so that the energy cost is balanced. As 20% nodes die, REEDG prolongs the network lifetime by at least 13%. In all the approaches, nodes die quickly after 30% nodes death due to the greater distances between the nodes. Also, more frequency of nodes as leaders causes the energy to drain rapidly. COSEN has longer lifetime than that in PEGASIS when 1% nodes die, since it makes the energy cost balance on each node. Moreover, ELCC outperforms PEGASIS by avoiding the length of the chain much too long and minimizing the transmission distance of the chain.

The comparison of lifetime.
6. Conclusions
This paper proposed a novel robust and energy-efficient data gathering (REEDG) approach for sensor information collecting system. REEDG is based on a combination of grid and chain network structure. It can improve the system robustness and reduce energy consumption so as to increase the network lifetime without degrading the data gathering performance. REEDG outperforms the other approaches by allowing the radios of nodes to sleep in most of the time and work only when they need to send data REEDG. Besides, each node takes the role of CH different times according to the location and the residual energy of the node so that the energy cost is balanced in the whole network. Moreover, in REEDG, one grid is regarded as a unit to form a data transmitting chain, which reduces the frequency of the chain reconstructing and improves the system robustness. Our experiments proved that REEDG outperformed the state-of-the-art approaches by improving the data transmission ratio at lowest 24% when 20% nodes fail as well as prolonging the network lifetime by at least 13% as 20% nodes die.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Natural Science Foundation of China (61301094), NPU Foundation for Fundamental Research (NPU-FFR-JCY20130135), and the Postdoctoral Science Foundation of China (2014M552490).