
Abstract
An adaptive sliding mode controller using radial basis function (RBF) network is proposed to approximate the unknown system dynamics for cantilever beam. Neural network controller is designed to approximate the unknown system model. In the presence of unknown model uncertainties and external disturbances, sliding mode controller is employed to compensate for such system nonlinearities and improve the tracking performance. Online neural network (NN) weight tuning algorithms are designed based on Lyapunov stability theory, which can guarantee bounded tracking errors as well as bounded NN weights. Numerical simulation for cantilever beam is investigated to verify the effectiveness of the proposed adaptive neural control scheme and demonstrate the satisfactory vibration suppression performance.
1. Introduction
Recently, vibration control using piezoceramic material has been widely studied and applied. The advantages of piezoceramic material include low-power consumption, rapid response, compactness, and easy implementation. Usually flexible structures are lightly damped owing to small material damping and lack of air damping in space, making vibration inevitable. This will influence the control accuracy and lead to fatigue damage to components. Therefore, active vibration control for space flexible structures is an important concern. Vibration control has been a challenging problem for both academic and industrial researchers for many years. During the past few years, advanced control approaches have been proposed to control the vibration of flexible structures. Li et al. [1] presented adaptive fuzzy sliding mode based active vibration control where fuzzy logic-based controllers were applied to active vibration control of a smart flexible beam with mass uncertainty through experimental studies. Wang et al. [2] presented an experimental study of an adaptive robust sliding mode control scheme based on Lyapunov's direct method for active vibration control of a flexible beam using PZT (lead zirconate titanate) sensor and actuator. Fallah and Ebrahimnejad [3] proposed a finite volume (FV) formulation for the free vibration analysis and active vibration control of the smart beams with piezoelectric sensors and actuators. Halim and Moheimani [4] designed a feedback controller that suppresses vibration of flexible structures to minimize the spatial H∞ norm of the closed-loop system. Lee [5] presented active vibration control of a cantilever beam structural system by combining the adaptive input estimation method with the fuzzy robust controller. Oveisi and Gudarzi [6] used two different adaptive control algorithms for the vibration control of geometrically nonlinear beam with macrofiber composite (MFC) actuators. Moradi et al. [7] proposed the concept of smart materials in order to control and abate the vibrations of nonlinear beams. Ahmadabadi and Khadem [8] presented an optimal design for a system comprising a nonlinear energy sink (NES) and a piezoelectric-based vibration energy harvester attached to a free-free beam under shock excitation. Ge et al. [9] used the adaptive boundary control technique to suppress the vibration of Euler-Bernoulli beam system. Zheng et al. [10] presented a novel genetic algorithm for multimodal vibration control of beam structures via photostrictive actuators. Zhang et al. [11] implemented some experiments not only for depiction of hysteresis property but also for vibration suppression by designing an adaptive controller to a smart system which is consisted of a cantilever beam bonded with a piezoelectric actuator. Jovanović et al. [12] presented experimental verification of the active vibration control of a smart cantilever composite beam using a PID controller. Zhang and Li [13] developed a finite element model of a piezoelectric actuator and cantilever in a thermal environment to suppress vibration effectively. Azadi et al. [14] presented a hybrid adaptive sliding mode/Lyapunov controller for both the rotational maneuver and the vibration control of smart flexible appendages of a satellite moving in a circular orbit. Kuo et al. [15] presented a complete strategy including mathematical modeling, dynamic analysis, vibration controller design, and simulation for linear and nonlinear systems, considering dynamic stability analysis and vibration control for a rotating elastic beam connected with an end mass driven by a direct current (DC) motor. Zorić et al. [16] derived optimal vibration control of a thin-walled composite beam by using the fuzzy optimization strategy based on the particle swarm optimization algorithm. Koofigar and Amelian [17] presented a novel adaptive-based vibration control algorithm for smart structures, despite the model parameter variations, unstructured uncertainties, and environmental disturbances. Kim et al. [18] presented a backpropagation neural network (BPNN) based proportional-derivative (PD) algorithm to suppress the vibration. Qiu et al. [19] developed a point-to-point (PTP) motion control method for accurate positioning and vibration suppression of a vertical XY positioning system with a flexible beam. Yang et al. [20] designed a control method for the vibration of a Timoshenko beam by virtue of artificial neural networks. Spencer et al. [21] presented an adaptive nonlinear neural network control algorithm that can be used with smart structure actuators and sensors to control the shape and suppress the vibrations of flexible beams.
Since neural network has the capability to approximate any nonlinear function over the compact input space, it is a useful method to approximate the unknown dynamics in flexible structure. In this paper, adaptive RBF neural network vibration control of a flexible beam is proposed. The main motivations are highlighted as follows.
An adaptive neural sliding mode control scheme is adopted to online mimic the unknown model and compensate for the approximation error. It incorporates RBF neural network into the adaptive sliding control system of cantilever beam to learn the approximation model. The sliding mode controller is employed to eliminate the approximation error and attenuate the model uncertainties and external disturbances and guarantees that the tracking error can converge to zero. In the presence of unknown model errors and external disturbances, the RBF neural network is employed to compensate for the system nonlinearities without losing the robustness property and the precision.
The main contribution is the integration of adaptive control, sliding mode control, and the nonlinear approximation of RBF neural network control. Unlike the conventional control methods, the proposed control strategy has the ability to approximate the nonlinear characteristics of system model without establishing accurate mathematical model. The proposed adaptive neural network sliding mode controller can guarantee the stability of the closed-loop system and improve the robustness against external disturbances and model uncertainties.
The paper is organized as follows. In Section 2, the model of piezoceramic cantilever beam is described. In Section 3, adaptive neural controller is proposed. Simulation results are presented in Section 4 to verify the effectiveness of the proposed adaptive neural control. Conclusions are provided in Section 5.
2. Model of Piezoceramic Cantilever Beam
As shown in Figure 1, the length, width, and thickness of the cantilever beam are L b , b, and t b , respectively. The piezoceramic actuator and sensor are symmetrically pasted on the top and bottom of cantilever beam, and the length, width, and thickness of the piezoceramic element are, respectively, L p , b, and t p . X1 and X2 are the distance between both ends of the piezoceramic and fixed ends of cantilever beam, respectively.

Model of piezoceramic cantilever beam.
We assume that the piezoceramic patches are pasted well on the cantilever beam and the stickup layer of piezoceramic patches has no effect on the dynamic characteristics of the cantilever beam. According to the direct piezoceramic effect, the output charge of piezoceramic sensor which is caused by the beam deflection is

where d31 is piezoceramic constant, E p is spring modulus of piezoceramic patches, and w is beam deflection.
Under the action of the input voltage, the piezoceramic actuator torque for the cantilever beam is

where h(x) is Heaviside step function, Uα(t) is input voltage, and K a = (1/2)bd31E p (t b + t p ) is coupling coefficient.
The dynamics of cantilever beam vibration is as follows:

where ρ1, c, and EI are linear density, damping coefficient, and flexural rigidity of the beam, respectively.
When the cantilever beam does flexural vibration in the xy plane, by means of the preceding N modals of the cantilever beam, the deflection of the beam w can be expressed as

where φ = [φ1(x), φ2(x), …, φ n (x)] is mass-normalized orthogonal modal matrix and q = [q1(x), q2(x), q n (x)] is modal coordinates vector; thus, the displacement of the free end of the cantilever beam is

The output voltage of piezoceramic sensors can be expressed as

where C p is capacitance of piezoceramic patch, G = [G1, G2, …, G n ], G i = K s [φ i ′(x2) − φ i ′(x1)], and K s = d31t b E p /2C p .
Using (3) and (4), modal equation of motion of piezoceramic smart cantilever beam under the action of a piezoceramic actuator can be expressed as

where ξ i is the ith order structure damping, ω i is the ith natural frequency, and B i = K a [φ i ′(x2) − φ i ′(x1)].
3. Design and Stability Analysis of Adaptive Neural Controller
Considering the external disturbances, the vector form of piezoceramic cantilever beam dynamics model can be written as

where C, K ∈ Ri*i, C is damping term, K is frequency term, d is external disturbing term, u is input term, and u = B i U a .
Define the tracking error as follows:

where q d (t) is reference trajectory and q(t) is actual trajectory.
The sliding surface is defined as

where Λ = Λ T > 0 is design parameter matrix; differentiating s(t) and using (8), the piezoceramic cantilever beam dynamics model can be rewritten as

where the unknown beam function is

and

The conventional adaptive sliding mode control system still requires detailed information of cantilever beam explicitly in terms of nonlinear compensation, which makes it difficult to be implemented in practical situations. Hence, in allusion to the trajectory tracking control of cantilever beam with unknown model uncertainties and external disturbances, a new adaptive RBF neural network control algorithm is synthesized in this section, which utilizes the advantages of RBF neural network to approximate and compensate for the unknown uncertainties.
RBF neural network has an inherent ability to learn and approximate any nonlinear function over the compact input space. RBF neural network has the universal approximation property that states that any sufficiently smooth function can be approximated by a suitable large network for all inputs in a compact set and the resulting function reconstruction error is bounded. The RBF network has a fast convergence property and a simple architecture.
If we can reconstruct an estimate of f(x) by using RBF neural network online approximation, we define the adaptive control law as

where
Then the closed-loop system becomes
The block diagram of adaptive neural sliding mode control structure is shown in Figure 2. The proposed adaptive RBF neural network can online update the estimates of unknown system nonlinearities and improve the tracking resolution of cantilever beam in the presence of model uncertainties and external disturbances.

Block diagram of adaptive neural sliding mode control.
The structure of RBF neural network is a three-layer feedforward network shown as in Figure 3. The model of an RBF neural network can be described as
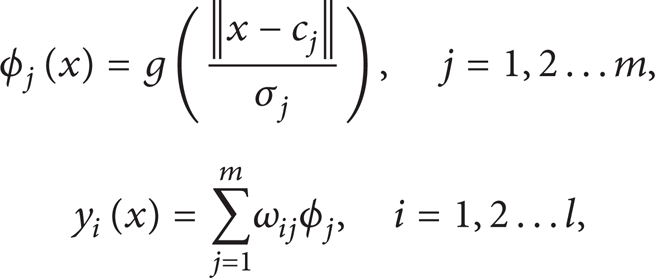
where m and l are the numbers of hidden and output nodes, respectively, and
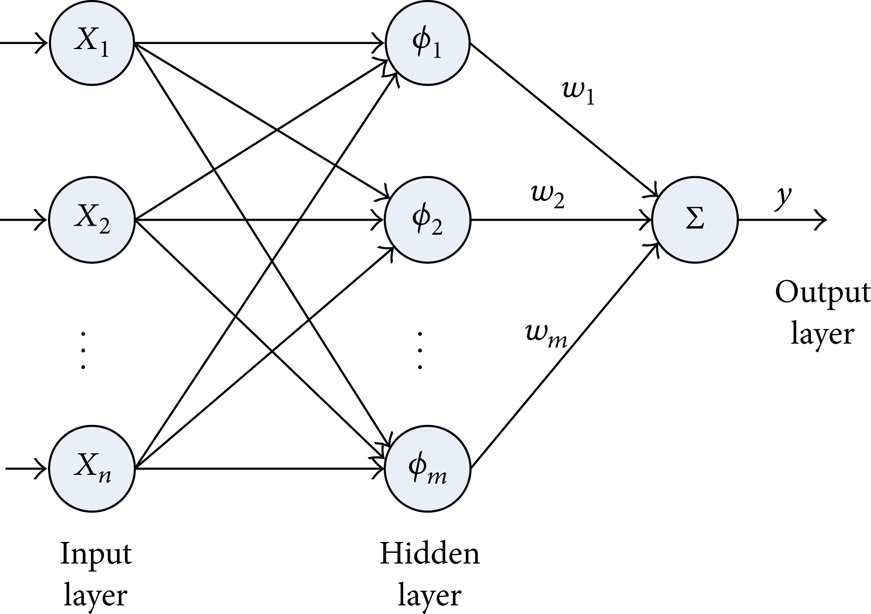
Architecture of RBF network.
The regression analysis of RBF network is shown in Figure 4. In statistics, regression analysis is a statistical process for estimating the relationships among variables. It includes many techniques for modeling and analyzing several variables, when the focus is on the relationship between a dependent variable and one or more independent variables. The RBF neural network has the best approximation performance and global optimal characteristics compared to other networks because of its simple structure and fast training speed. Meanwhile, it can be widely used in nonlinear function approximation and other areas of neural network model.
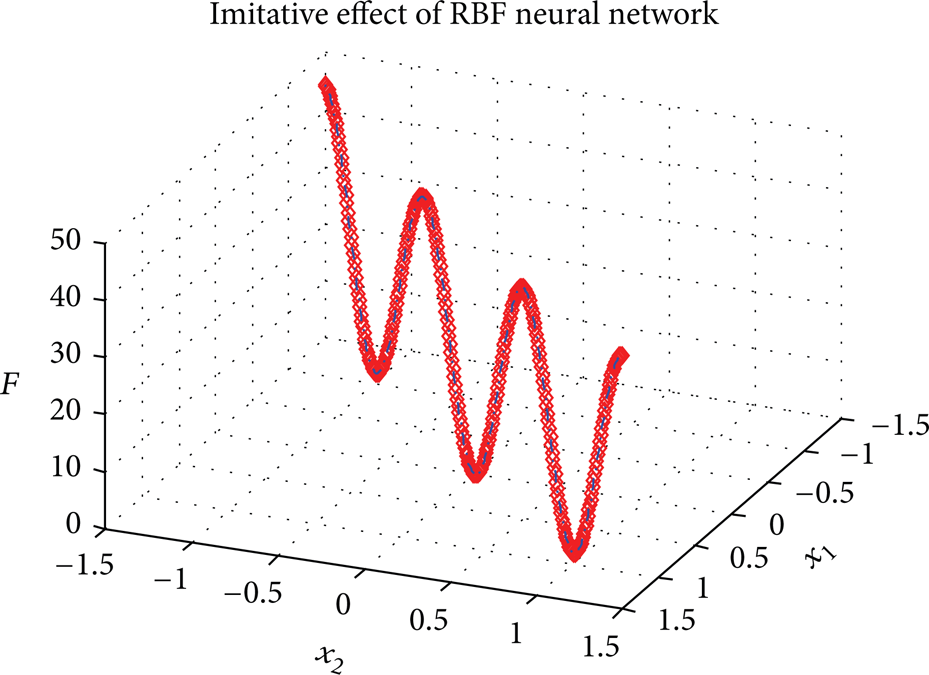
Regression analysis of RBF network.
If the RBF net parameters c j and σ j are kept fixed, the only adjustable weights ω appear linearly with respect to the known nonlinearity φ(x). Now, the output of RBF net can be rewritten as

where W = [ω ij ], φ(x) = [φ j (x)].
Following the above results, the unknown cantilever beam function f(x) in (12) can be parameterized by RBF network with output

where ∊(x) is the neural network functional reconstruction error vector. For the ideal neural network weights,

Meanwhile, we assume that the ideal weights are bounded by

And define the neural network functional estimate of (12) as

where
Substituting (21) into (14) yields

The proposed neural network control structure is shown in Figure 2.
Using this controller, the sliding surface dynamics become

where
Theorem 1. If the updated control law (22), with the sliding surface (10) and the adaptation law of the RBF neural network weighting matrix designed as (24), is applied to the nonlinear uncertain system such as flexible structure defined by (8), then the system's tracking error can converge to zero and the vibration can be suppressed. And the unknown model uncertainties and external disturbances can be approximated online by the RBF neural network so as to improve the robustness of the dynamic system

where any constant gain matrix F = F
T
> 0 and scalar design parameter γ > 0. Then, the sliding mode γ(t) and RBF neural network weight estimates
Proof. Let us consider the following positive definite function as a Lyapunov function candidate:

where tr (·) denotes the matrix trace operator and matrix F is the adaptive law gain.
Differentiating (25) yields
Substituting (24) in (26) and using the fact that

Since
then (28) becomes

which is negative as long as the term in braces is positive. Completing the square yields

which is guaranteed positive as long as

or

Thus,
Remark 2. Given A = [a
ij
], the Frobenius norm is defined by
The associated inner product is 〈A, B〉 F = tr (AB T ), where the dimensions of A and B are suitable for matrix product.
4. Simulation Study
According to the dynamics characteristics, the main vibration is determined by the structure's first several modes. To illustrate the simulation of this flexible structure vibration suppression, here we only choose the first mode system. In this section, we will evaluate the proposed adaptive neural network scheme, which will require no knowledge of the dynamics, not even their structure on the cantilever beam model. The control objective is to maintain the cantilever beam system to track the desired reference trajectory and estimate the unknown function f(x). The parameters of the cantilever beam are chosen as C = 0.18, K = 56.4. The desired trajectories are described by
Parameters of the RBF neural network.

4.1. Simulation Study with Steady and Transient Disturbances
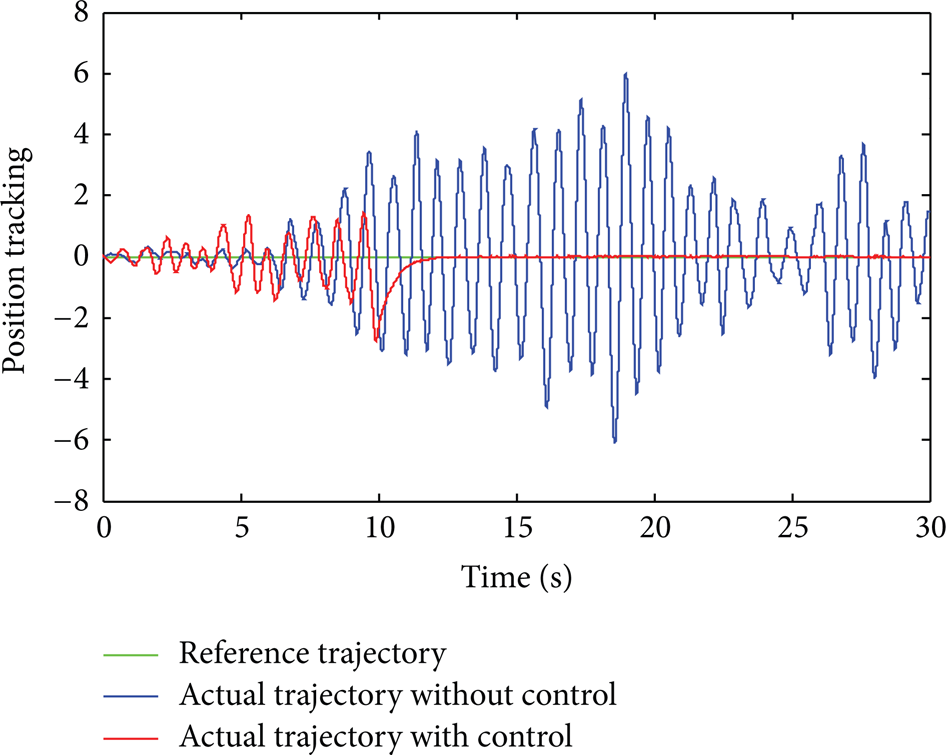
White noise chosen as d = randn(1,1) is added all the time, and the control action is implemented after 10 s. Figures 5 and 6 depict the tracking position of cantilever beam using the adaptive RBF neural control law under steady disturbance. It can be observed intuitively that the actual motion trajectory of the cantilever beam is consistent with the desired reference trajectory in a shorter finite time, demonstrating that the adaptive tracking performance with RBF neural network compensator is satisfactory as we expected.
Position tracking under steady disturbance.

Position tracking comparisons of RBF NN control with no control under steady disturbance.
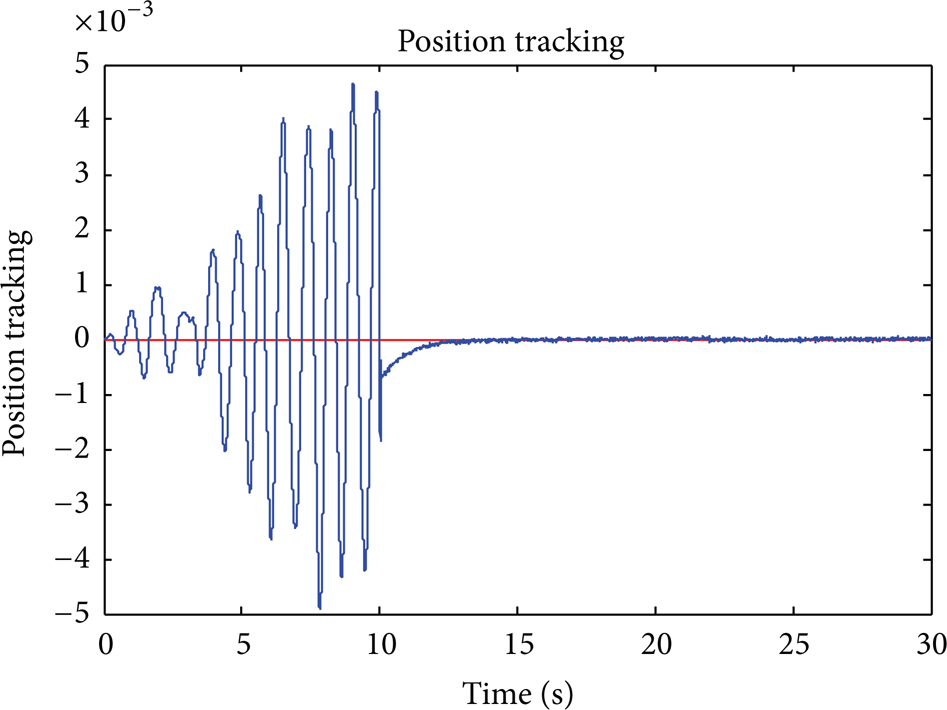
In order to demonstrate the advantages of the proposed controller, a comparable investigation is accomplished between the proposed RBF neural network and conventional PD control applied to the uncertain cantilever beam in Figure 7, where the position tracking corresponding to adaptive RBF neural network control decreases obviously in contrast with the conventional PD control. Besides, from Figure 8, it can be also seen that the tracking position of adaptive RBF neural control converges to zero in about 3 seconds and the trajectory is much smoother, improving the dynamic behavior of the cantilever beam and verifying that the designed control law can ensure the stability of the vibration control system.

Position tracking comparisons of PD control with RBF NN control under steady disturbance.

Partial enlarged figure of Figure 6.
Then white noise chosen as d = randn(1,1) is added during 0 seconds~10 seconds, and the control action is implemented after 10 s. Figures 9 and 10 show the position trajectories of cantilever beam using the adaptive RBF neural network control law under transient disturbance. It can be observed intuitively that the actual motion trajectory of the cantilever beam is consistent with the desired reference trajectory in a shorter finite time, demonstrating that the adaptive tracking performance with RBF neural network compensator is satisfactory as we expected. Figures 11 and 12 depict position tracking comparisons of RBF NN control under steady disturbance with RBF NN control under transient disturbance. It can be observed that the trajectory under transient disturbance is much smoother.

Position tracking under transient disturbance.

Position tracking comparisons of RBF NN control with no control under transient disturbance.

Position tracking comparisons of RBF NN control under steady disturbance with RBF NN control under transient disturbance.

Partial enlarged figure of Figure 10.
4.2. Simulation Study with Large Steady and Transient Disturbances
In order to testify the performance and robustness of the vibration control system in the presence of large disturbance. Now white noise disturbance d = 1000randn(1,1) is added all the time, and the control action is implemented after 10 s. Figures 13 and 14 depict the tracking position of cantilever beam using the adaptive RBF neural network control law under large steady disturbance. It can be observed intuitively that the actual motion trajectory of the cantilever beam is consistent with the desired reference trajectory in a shorter finite time, demonstrating that the adaptive tracking performance with RBF neural compensator is satisfactory as we expected. From Figure 15, it can be also seen that the tracking position of adaptive RBF neural network control converges to zero in about 3 seconds and the trajectory is much smoother, which improves the dynamic behavior of the cantilever beam and verifies that the designed control law can ensure the stability of the system.

Position tracking under large steady disturbance.
Position tracking comparisons of RBF NN control with no control under large steady disturbance.

Position tracking comparisons of PD control with RBF NN control under large steady disturbance.
Similarly, as in Section 4.1, white noise disturbance d = 1000randn(1,1) is added during 0 seconds~10 seconds, and the control action is implemented after 10 s. Figures 16 and 17 draw the trajectories of cantilever beam using the adaptive RBF neural network control law under large transient disturbance. It can be observed intuitively that the actual motion trajectory of the cantilever beam is consistent with the desired reference trajectory in a shorter finite time, demonstrating that the adaptive tracking performance with RBF neural network compensator is satisfactory as we expected.

Position tracking under large transient disturbance.

Position tracking comparisons of RBF NN control with no control under large transient disturbance.
5. Conclusion
An adaptive sliding mode controller using RBF network to approximate the unknown system dynamics for cantilever beam is presented. Neural network controller is designed to approximate the unknown system model. In the presence of unknown model uncertainties and external disturbances, sliding mode controller is employed to compensate for such system nonlinearities and improve the tracking performance. Online NN weight tuning algorithms are designed based on Lyapunov stability theory, which can guarantee bounded tracking errors as well as bounded NN weights. It is clearly observed that the cantilever beam function can be effectively approximated by its estimate using the RBF neural network and the tracking error of the proof mass can be greatly improved. Numerical simulation for cantilever beam is investigated to verify the effectiveness of the proposed adaptive neural control scheme and demonstrate the satisfactory tracking performance and robustness.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
The authors thank the anonymous reviewers for their useful comments that improved the quality of the paper. This work is partially supported by National Science Foundation of China under Grant no. 61374100 and Natural Science Foundation of Jiangsu Province under Grant no. BK20131136.