
Abstract
An important consideration in control system design is that of model uncertainty. Besides, systems with mixed uncertainties, chaotic vibrations, and input nonlinearities are not easily stabilized and traditional control schemes for linear systems are not always effective. Therefore, in this paper, we will solve two problems, first searching a novel hybrid control methodology to achieve the practical stabilization for uncertain systems with mixed uncertainties and second calculating the guaranteed exponential convergence rate with the convergence radius. The applicability of the main results is demonstrated by a tracking controller design for a class of uncertain nonlinear mass-damper-spring systems with mixed uncertainties, chaotic vibrations, and input nonlinearities.
1. Introduction
Robustness issues in control theory play an important role because each model of a real process has inherent uncertainties that have to be taken into account in any controller design. Such uncertainties may be due to measurement error, simplified models of natural laws, neglected dynamics, or inevitably uncertain model. In recent years, a variety of methodologies in robust control have been studied and proposed, such as adaptive control approach, differential inequality approach, sliding mode control approach, H∞ control approach, adaptive sliding mode control approach, time-domain approach, backstepping control approach, neural-fuzzy approach, LMI approach, and others; see, for instance [1–12] and the references therein. In [8], based on the time-domain approach with differential inequality, a feedback control has been proposed to accomplish generalized exponential synchronization for a pair of mechanical systems with uncertainties. Besides, a tracking control has been proposed in [9] to realize the generalized projective synchronization in practical type for the uncertain horizontal platform systems with parameter mismatching, external excitation, and input nonlinearity via the differential inequality approach.
On the other hand, it is difficult and impossible to keep up the parameter values (e.g., mass, resistors, capacitors, and inductors) of the controllers as fixed values in view of unavoidable tolerances and unpredictable or uncontrollable environmental conditions. As a result, uncertain input nonlinearity inevitably exists in dynamic control systems [9]. More recently, attention has been focused on various uncertain input nonlinearities common in uncertain systems, such as deadzones, relays, saturation, hysteresis, and others; see, for instance [6, 13–17] and the references cited therein.
In this paper, the concept of practical stabilization will be introduced. Motivated by the optimal control and robust control framework, a novel hybrid strategy will be
This paper is organized as follows. The problem formulation and main result are presented in Section 2. Numerical simulations for a class of uncertain nonlinear mass-damper-spring systems are given in Section 3 to illustrate the effectiveness of the developed results. Finally, some conclusions are drawn in Section 4.
2. Problem Formulation and Main Results
Firstly, let us introduce a definition which we need in the sequel.
Definition 1 (see [6]). The deadzone nonlinearities
satisfying, for every i ∈ {1, 2, 3, …,m},

for any
In this paper, we consider the following uncertain nonlinear control system:

where x(t) ∈ ℜn × 1 is the state vector,


where s ∈ ℜv × 1 describes an evolution of the chaotic excitation. Throughout this paper, the following assumption is made:
there exists a continuous function f(t,x,s) ≥ 0 such that

The aim of this paper is to design a hybrid control u such that the state x(t) of the system ((3a) and (3b)) can converge to the equilibrium point at x = 0.
A precise definition of the practical stabilization is given as follows, which will be used in subsequent main results.
Definition 2. The nonlinear control system ((3a) and (3b)) with ((4a) and (4b)) is said to realize the practical stabilization, provided that, for any α > 0 and ε > 0, there exists a control u: = u(α,ε) such that the state trajectory satisfies

for some κ > 0. In this case, the positive number ε is called the convergence radius and the positive number α is called the exponential convergence rate. In other words, the practical stabilization means that the statesof the system ((3a) and (3b)) can converge to the equilibrium point at x = 0, with any prespecified convergence radius and exponential convergence rate. It is evident that a control system, having small convergence radius and large exponential convergence rate, has better steady-state response and transient response.
First consider the case of the system ((3a) and (3b)) without any uncertainties; that is, ΔA = O, Δf = 0, and

Let us consider the linear optimal control problem of system (7) with an associated performance index:

with any α > 0 and Q > 0. It can be shown by [18] that the optimal control for the minimization of (8) subject to (7) is given by

where P > 0 is the unique solution of the Riccati equation:

Note that α and Q are designer-chosen parameters and the closed-loop system resulting from the application of the optimal control (9) is globally exponentially stable with a prescribed exponential rate of convergence α (or degree of stability) toward the zero equilibrium point. However, the nominal control law (9) may not suffice to accomplish the uncertain system ((3a) and (3b)) to be practical stabilization. Thus a corrective control term must be appended to overcome the uncertain part of ((3a) and (3b)). In the following paragraphs, a hybrid control, consisting of an optimal control and a corrective control, will be proposed such that the practical stabilization of the uncertain system ((3a) and (3b)) can be fulfilled.
Here an assumption is made on the system ((3a) and (3b)) throughout this paper:
(A2)
Obviously, in case of ΔA(t) = O, the assumption (A2) is evidently satisfied in view of (Q + PBB T P) > 0 and P > 0.
Now we present the main result for the practical stabilization of the system ((3a) and (3b)) with ((4a) and (4b)).
Theorem 3. The uncertain nonlinear system ((3a) and (3b)) with ((4a) and (4b)), (A1), and (A2) is practical stabilization under the hybrid control law as

where



and P > 0 is the unique solution of (10), with α > 0 and ε > 0.
Proof. Let

The time derivative of V(x(t)) along the trajectories of system ((3a) and (3b)) with u defined by (12)–(15) is given by

in view of (A1), (A2), (10), and (16). It can be deduced, from (16) and (17), that

This completes the proof.
Remark 4. From (12)–(15), it can be readily obtained that

provided that we select

Consequently, it is worth noting that the upper bound of ∥u(α,ε)∥ is dependent on the parameters of m1, m, and
Remark 5. Below we summarize an algorithm to find the hybrid control law of (12) stated in Theorem 3.
INPUT. This includes uncertain nonlinear systems with parameter mismatchings, chaotic vibrations, external excitations, input nonlinearities ((3a) and (3b)) and ((4a) and (4b)), the prespecified exponential decay rate α, and the prespecified convergence radius ε.
OUPUT. This includes the hybrid control of (12).
Step 1. Determine m, m1, and
Step 2. Solve the solution bounds of the chaotic vibrations and choose f(t,x,s) such that (A1) is satisfied.
Step 3. Select any Q > 0 and calculate the positive definite solution P from the Riccati equation of (10).
Step 4. If the condition of (A2) cannot be satisfied by any choice of Q > 0, then OUTPUT = “search for another control strategy.” and go to Step 8.
Step 5. Form u1 from (13).
Step 6. Form u2 from (14) and (15).
Step 7. OUPUT u(α,ε) = u1 + u2.
Step 8. Stop.
3. Numerical Simulations
Consider the following uncertain nonlinear mass-damper-spring control system [19] shown in Figure 1:

where by′(t)|y′(t)| represents nonlinear dissipation or damping, k0y(t) + k1y3(t) represents a nonlinear spring term, Δa1(t)y2(t) represents the uncertainty, Δϕ(u,1,1) is the uncertain input nonlinearity, and Δa2(t)·s1(t) represents chaotic vibration, with

In addition, the source of external driving vibrations is the well-known generalized Lorenz system, governed by




with k = 0.5. It is noted that the system ((23a)–(23d)) displays chaotic behavior for each 0 ≤ k < 1 [20, 21]. Our objective, in this example, is to design a tracking control u(t) such that the output y(t) of the system (21) can track the desired signal y d (t), with the exponential convergence rate α = 1 and the convergence radius ε = 0.05. Define the error vector:
The system (21) can be rewritten as the following error dynamic system:

where


The desired signal, in this example, is chosen as y d (t) = sin t.

An uncertain nonlinear mass-damper-spring system.
Step 1. From (27), one has
Step 2. The condition (A1) is clearly satisfied if we let

in view of (26) and |s i (t)| ≤ 48.45, ∀t ≥ 0 [22].
Step 3. By (10), we have

if we select

Step 4. The condition (A2) is evidently satisfied, in view of

Step 5. From (13), we have u1 = − 6.15x1 − 4.91x2.
Step 6. From (14) and (15), we deduce

Step 7. The tracking control, given by (12), can now be calculated as

Consequently by Theorem 3, we conclude that the output of the feedback-controlled system tracks the desired signal y d = sin t, with the guaranteed exponential convergence rate α = 1 and the convergence radius ε = 0.05.
The chaotic vibration of the system ((23a)–(23d)) is shown in Figure 2. Besides, the output signals of uncontrolled systems and controlled systems are depicted in Figures 3 and 4, respectively. Meanwhile, the time response of the tracking control is depicted in Figure 5. From the foregoing simulations results, it is seen that the error dynamic system of (25) achieves the practical stabilization under the tracking control law of (33).
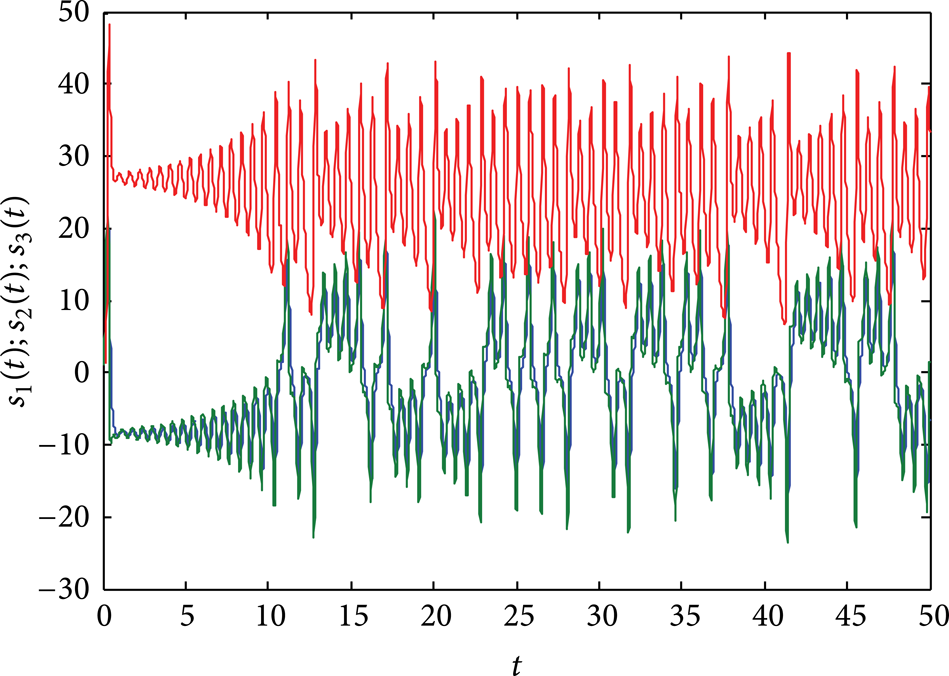
The chaotic signals of s1(t), s2(t), and s3(t).

The output signal of the uncontrolled system.

The output signal of the feedback-controlled system.

The control input of u(t).
4. Conclusions
In this paper, the concept of practical stabilization has been introduced and a novel hybrid strategy that combines the benefits of an optimal control and robust control framework has also been established. Based on such a novel hybrid strategy, a feedback control has been proposed to accomplish practical stabilization for a class of uncertain nonlinear systems with mixed uncertainties, chaotic vibrations, and input nonlinearities. The major contributions of this paper can be concluded as follows.
A hybrid control method has been proposed to fully combine the advantages of optimal control and robust control.
Input nonlinearities, mixed uncertainties, and chaotic vibrations can be simultaneously overcome by the hybrid controller.
Both of the convergence radius and guaranteed exponential convergence rate can be arbitrarily prespecified.
The tracking control design of uncertain nonlinear mass-damper-spring systems with mixed uncertainties, chaotic vibrations, and input nonlinearities has been provided to illustrate the feasibility and effectiveness of the obtained results.
Footnotes
Nomenclature
Conflict of Interests
The author declares that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was supported in part by I-Shou University (ISU102-04-07). The author would also like to gratefully thank the National Science Council of Republic of China for supporting this work under Grant no. NSC-102-2221-E-214-043.