
Abstract
This paper explores the possibility of enhancing consensus achievement of decentralized sensors by establishing cooperative behavior between sensor agents. To these ends, a novel particle swarm optimization framework to achieve robust consensus of decentralized sensors is devised to distribute sensing information via local fusing with neighbors rather than through centralized control; the new framework showed a 16.5 percent improvement in consensus achievement as compared to the classic majority rule method. Noteworthy enhancements in consensus achievement are also pertinent to the comparable situation of decentralized sensor systems.
1. Introduction
The distributed deployment of multiple sensors is designed to establish cooperative behavior between sensors, thus providing sufficient local information with different focuses and from different viewpoints relative to a given environment. In such a deployment, peer-to-peer communications between adjacent sensors are enabled to avoid the communication bottlenecks possible in a centralized network [1]. In a decentralized sensor system, sensing information of neighbors is fused locally rather than via central control as enabled by a distribution of intelligent agents with some degree of decision-making autonomy. A major research objective is to establish cooperative behavior between sensors with no external supervision.
Where each sensing mechanism among multiple sensor agents concurrently perceives environmental changes, each can derive an opinion in accordance with the sensing results. For example, when a user gives a speech command to the sensor agent, as shown in Figure 1, decentralized microphone of multiple sensor agents runs their speech recognition engines and derives an opinion. Furthermore, these opinions are shared with neighbors and are spread. As the technology has developed to date, when a conflict of nominal opinion arises and a central system cannot intervene, the system is unable to execute any service for the user. To address that failure, this paper proposes a scheme for consensus achievement of decentralized sensors (CADS) based on the particle swarm optimization (PSO) framework for decision-making among decentralized multiple sensor agents.

User speech recognition on decentralized sensor system.
The rest of the paper is organized as follows. Section 2 discusses about the decision problem and precedent methods to solve it. We then introduce the scheme of consensus achievement using decentralized sensors based on the PSO framework in Section 3. Section 4 describes how performance evaluation is progressed for validating the proposed method with the independent simulations. Section 5 concludes the research and describes the possibilities for future work.
2. Decision Problem and Multiple-Agent Perception Capability
2.1. Collective Decision-Making in a Decentralized Sensor System
As another way to deploy a set of sensors into the environment, this section discusses a decentralized sensor system. As shown in Figure 1, that approach treats sensors in the network as distributed intelligent agents capable of autonomous decision-making. A major research objective is to establish cooperative behavior between sensors with no external supervision. The three criteria for contrasting collective and small group behaviors were revealed in [2]. In the first, psychological criterion, large groups convey a sense of transcending power that serves to reinforce or suppress individual activity. In collective behaviors, the second criterion, new forms of communications and interactions arise, such as uncontrolled circular reactions related to crowd psychology or one-way communication of the mass media. How participants are mobilized for action is the third criterion, with larger groups using such new devices as incitation, agitation, and morale development to that end.
Meanwhile, collective behaviors, especially in the field of collective robotics, have been classified into several main categories: spatially organizing behaviors, navigation behaviors, and collective decision-making [3]. The first area focuses on how to organize and distribute robots in space via the following approaches: aggregation, pattern formation, chain formation, and self-assembly and morphogenesis. Navigation behaviors include collective exploration, coordinated motion, and collective transport, while collective decision-making denotes collective behavior in which a swarm of robots collectively makes a decision. In addition, two key processes underlie most collective behaviors: agreement and specialization. The former denotes consensus achievement that converges toward a single decision among possible alternatives, whereas the latter denotes task allocation to distribute the roles of participating agents over various possible tasks to maximize overall performance. This paper explores the collective decision-making underlying consensus achievement in a decentralized sensor system.
2.2. Approaches to Achieving Linear Consensus
Computer scientists have long studied consensus problems, especially in such areas as pervasive computing [4, 5], sensor network systems [6, 7], and multiagent systems [8, 9]. Olfati-Saber et al. [10] defined consensus and consensus algorithm as follows: consensus is a process to reach an agreement regarding a certain quantity of interest that depends on the state of all agents, whereas the consensus algorithm is an interaction rule specifying the information exchange between an agent and all of its neighbors on the network. A communication topology of interactions can be represented by a directed graph based on graph theory [10, 11].
As shown in Figure 2, given an undirected graph, which can be viewed as a special case of a directed graph, the set of nodes in the graph can exchange information with their neighbors


Example of an undirected graph used in this paper.
A convergence toward collective decision-making through local interactions among nodes is defined as (2) in [10, 11]. A diagonal matrix, meaning the degree matrix D, is defined as (3) where diagonal elements are calculated by the row sum of the adjacency matrix. Then, node consensus can be asymptotically converged with the set of neighbors of a node i and the Laplacian graph given as (4). Figure 3 shows an application of a consensus algorithm in a continuous-time system. For instance, the initial condition of nodes is given as




Results for the example undirected graph under the consensus algorithm.
Recently, a gossip protocol inspired by the form of gossip seen in social networks is emerging as an alternative approach to the above Laplacian-based consensus algorithm [12]. The concept of the gossip-based consensus algorithm can be illustrated by the analogy of spreading rumors. In [13], the goal of gossiping is described as for the n agents to reach a consensus in the sense that all n gossip variables ultimately reach the same value at the average of the initial values:
2.3. Majority Rule Approach
Such historical decision rules as unanimous agreement and unanimous consent minus one or two votes have long existed. The main scheme of the majority rule (MR) model [15], originally proposed to achieve consensus formation in public debates, is shown in Figure 4. At the first stage each agent has an opinion, and these agents are distributed randomly in a series of groups. Then, each group elects a representative according to majority rule. As this process is repeated until a single group remains, the hierarchy presidents thus elected constitute one upper level.

Galam: a three-level hierarchy with groups of multiple agents.
In statistics, the mode of a set of data, or its most frequent value [16], can be a way of expressing important information about a random variable. Unlike the arithmetic mean and median, the mode is not necessarily unique, and a set with more than two modes may be described as multimodal. Given the above example dataset
In the statistical physics community, the bounded confidence models have recently received much attention from the community [17]. When the possible opinion states are more than two, one can introduce bounded confidence to each other. In [18] the effects of agents’ confidence have been analyzed in conflict resolution of a multiagent system. The proposed confidence model used the confidence and reputation of the agent, which depends on past experiences, and could be used to determine the best strategy for conflict resolution. Table 1 shows a comparison of the three representative methods and the result of convergences toward a single decision among the possible alternatives.
Comparison of the three methods.

2.4. Decision Problem in Conflict of Opinion
Our study uses the number of statistical modes as alternative decisions. For example, given the opinion of dataset

Example of consensus achievement based on (a) the average consensus algorithm and (b) the majority rule among the bimodal opinions.
3. Proposed PSO CADS Mechanism
3.1. Particle Swarm Optimization
The PSO is an evolutionary computation algorithm proposed by Kennedy and Eberhart in 1995 [22], and it has been used in the simulations of bird flocking and fish schooling and swarming. The main idea of PSO is to use particles which are randomly located in a search space that can converge toward the global best position at every iteration [22]. PSO utilizes individual particles moving around the search space according to (5) and (6) over their velocity and position [23–27]. Each particle position is adjusted to the best position found and is updated as better positions are found by other particles. As the model is iterated, the particles can ascertain the best position found thus far. Consider


3.2. Proposed CADS Algorithm
The proposed CADS is based on the two main concepts of PSO: to match nearest-neighbor velocity (acceleration) and to weigh acceleration using a random term (craziness). Under the former concept, individual opinion moves toward a matching nearest-neighbor consensus. Under the latter concept, swarm opinion converges from alternatives, accelerating toward a better decision. As the model iterates, individual opinions conspire to achieve optimal consensus. Figure 6 details the process of PSO-based consensus achievement. First, each sensor agent requests neighbors’ opinions via a static or dynamic adjacent link, the individual opinions gathered are coordinated, and swarm particles thus are initiated according to these opinions and statistical mode values are extracted as alternative decisions. Second, swarm particles move following the two main concepts. Third, swarm particles move toward a consensus position and ascertain better decision. Fourth, all particles converge at an optimum consensus and the collective decision-making is underlying CADS. Finally, the above consensus process iterates until it meets the stop conditions.

Detailed process of PSO-based consensus achievement.
To detail this process concretely, let the opinion of node i be 

The cost function for the global best position, cost_
gbest(), for ascertaining the best decision is (9), where the minimum of square error compared to each alternative is calculated, and the global best position, 


The algorithm is implemented as in Algorithm 1. In addition to the use of the algorithm, line 12 of the algorithm is used to decide when to stop consensus achieving; for this the norm value of swarm velocity is less than a predefined minimum value of velocity. On the other hand, if the algorithm could not find an optimum consensus, the statistical mode m for which the difference between swarm particle and alternative set attains its smallest value is selected as arbitrated consensus, as shown in the line 18 of the algorithm.
Algorithm (1) Set (2) Place initial particles (3) (4) (5) Find pbest( (6) (7) (8) Find gbest(pbest( (9) (10) Calculate (11) Update (12) (13) Optimum consensus is selected by (11) (14) Stop iteration and (15) (16) (17) (18) (19)
4. Evaluation
4.1. Predefined Network Topology
Our study used the number of statistical modes as alternative decisions. For example, given a predefined network of 46 nodes and 347 links, as shown in Figure 7, and given the initial opinion of dataset
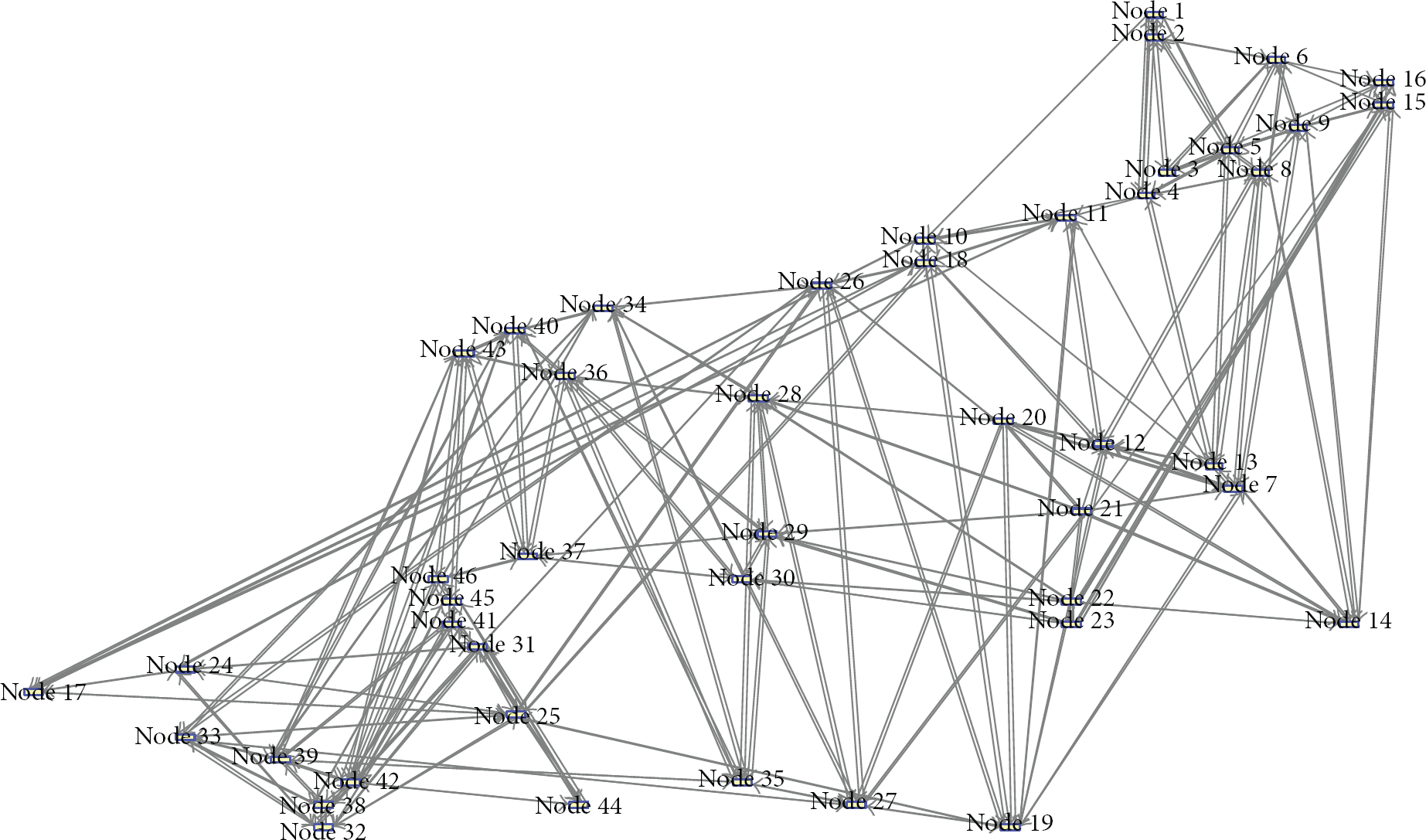
A predefined network with 46 nodes (sensor agents) and 347 links.

Initial opinions in the 46-sensor agent example.
The previous consensus algorithm, the standard average consensus algorithm [10, 11], derives a value near the mean value from the dataset, as shown in Figure 9(a). By comparison, the proposed framework is able to reach a decision using global knowledge and centralized communication given a conflict of opinion, as shown in Figure 9(b). As shown in Figure 10, the results of the two CADS simulations among multiple sensor agents use no global knowledge or centralized communication but rely solely on local interaction with neighbors. Figure 11 shows that the majority rule based on statistical modes cannot advance the process, given a conflict of opinions.
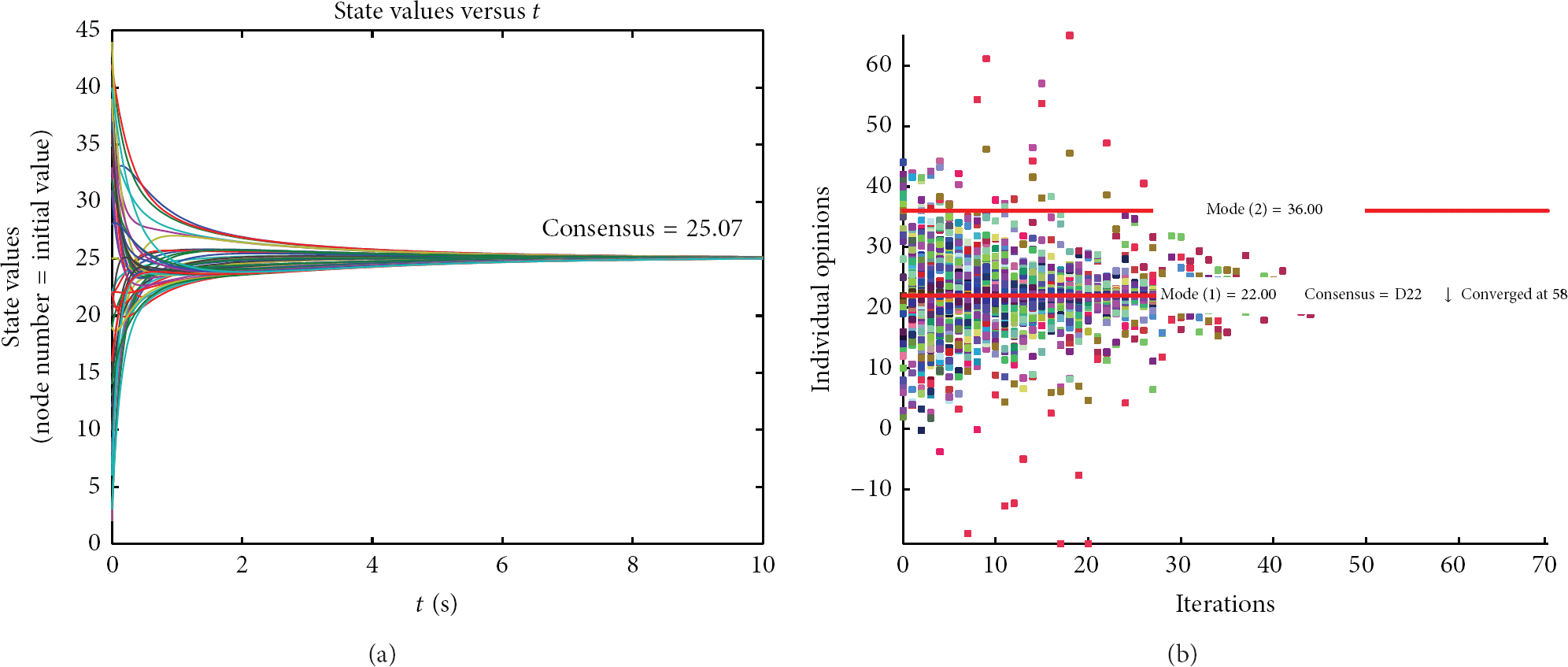
The results of (a) linear averaging consensus algorithm and (b) global consensus using the proposed framework with global knowledge and centralized communication.

Example of consensus achievement with decentralized sensors of multiple sensor agents.
Majority rule cannot further the process in a conflict of opinions.
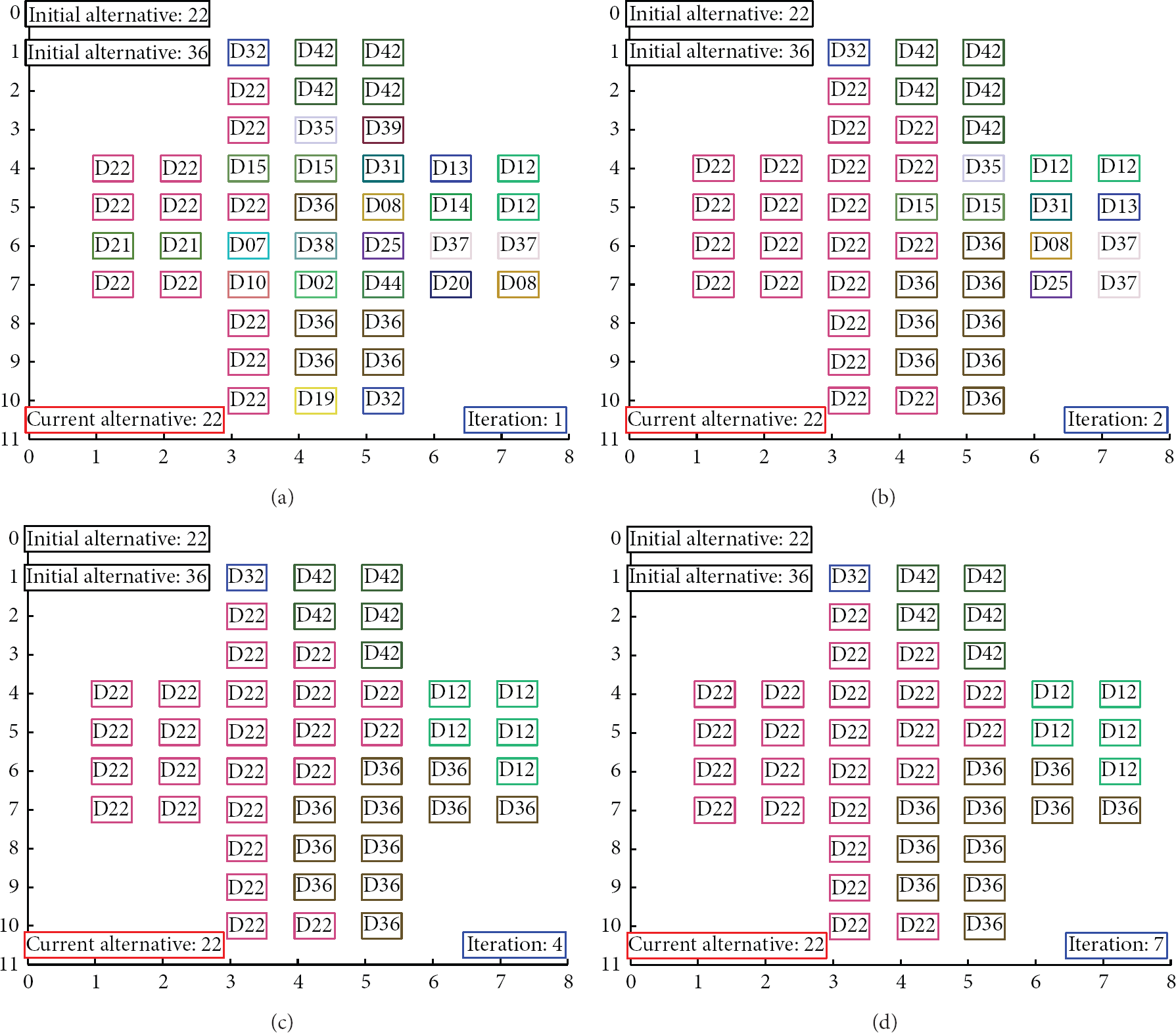
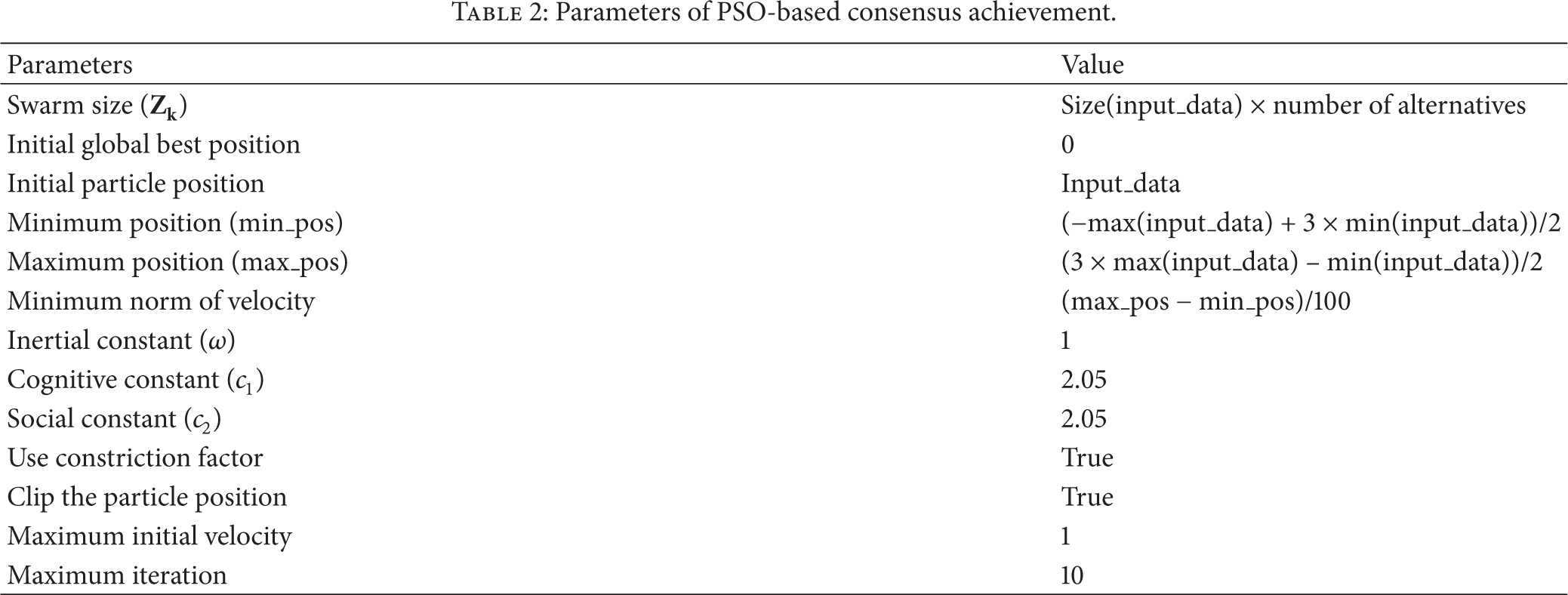
On the other hand, it also shows that the proposed PSO-based CADS can make a decision only through local interactions absent from a conflict of opinions, as shown in Figure 12. Table 2 shows the parameters of PSO-based consensus achievement.
Parameters of PSO-based consensus achievement.

The proposed PSO-based CADS can make a decision using only local interactions.
4.2. Randomly Generated Network Topology
Additional experiments applied two approaches for simulating experimental network topologies for 46 sensor agents randomly generated 1000 times. Figure 13 shows the histogram for the number of links and the number of alternatives, respectively. In this experiment, the success indicates when final consensus belongs to the initial alternatives found by the global consensus with global knowledge and centralized communication. Figure 14 shows that traditional majority rule using the statistical mode achieved consensus in 748 of the 1000 independent trials, while the proposed PSO-based CADS approach achieved consensus in 872 of 1000 independent trials. Therefore, the baseline for the comparison is 748; then the percent improvement is

The information for randomly generated networks in 1000 independent trials. (a) The histogram of the number of links. (b) The histogram of the number of alternatives (= the number of statistic mode values).

The histogram of each iteration successfully finding consensus in 1000 independent trials. (a) The majority rule approach. (b) The proposed PSO-based CADS approach.
5. Conclusion
This paper has explored a possible new way to enhance the decision-making capability of a decentralized sensor system through a consensus mechanism that distributes sensing information through local fusing with neighbors rather than through centralized control. For that purpose, this dissertation has proposed a novel PSO framework to achieve robust consensus of decentralized sensors. The new framework shows about 16.5 percent improvement in consensus achievement as compared to the general majority rule method. Therefore, a system using the proposed framework is expected to offer little or no delay in executing user service requests. The method will help establish cooperative behavior between sensor agents with no external supervision and may be expected to occasion remarkable enhancements in consensus achievement that are also pertinent to the comparable situation of decentralized sensor systems.
Footnotes
Acknowledgment
This research was supported by the MSIP (Ministry of Science, ICT and Future Planning), Korea, under the ITRC (Information Technology Research Center) support program (NIPA-2014-H0301-14-1014) supervised by the NIPA (National IT Industry Promotion Agency).
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.