
Abstract
The problem of walking simulation for the quadruped search robot on a slope is described as an uncertainty system. In order to create the virtual ramp road environment, VRML modeling language is used to build a real environment, which is a 3D terrain scene in Matlab platform. According to the VRML model structure of the quadruped search robot, a guaranteed cost nonfragile robust controller is designed for ramp road walking simulation. The constraint inequation is transformed into a strict linear inequality by using two equalities; the controller and the guaranteed cost upper bound are given based on the solutions of the linear matrix inequality. And the approaches of designing the controller are given in terms of linear matrix inequalities. The walking stability of quadruped search robot is observed using the VRML model established with the change of gravity curve. Simulation results show that the gravity displacement curve of the robot is smooth. The results given by linear matrix inequalities indicate that the proposed guaranteed cost controller is correct and effective.
1. Introduction
Quadruped robot has good structural stability [1, 2], dynamic compensation system, and the carrying capacity [3–5]. Quadruped robot has flexible adaptability in unstructured complex environments and also can walk and complete tasks such as search and rescue [6–9]. The quadruped search robot works in the unstructured environments; the type of terrain features is different from the smooth and hard indoor environment. The traditional design method is not able to meet the gait stability of mobile robot in ramp road environment.
The current research on static walking of quadruped search robot on a slope cannot meet the two important factors in the walking movement: first is to ensure the stability; second is to ensure continuous and rapid walking [10, 11]. The current gait planning research of quadruped search robot is to calculate leg motion sequence and each leg position, so the algorithm is complex. The online computation time is longer and it is not convenient for simulation analysis. It is not helpful to gait switching in the dynamic and static gait.
Designing a control system of quadruped search robot needs looking for exact mathematical mode of plant, but the mode cannot be obtained in any case [12]. Therefore, the model may contain the uncertainties such as parameter uncertainties, unmodeled dynamics, and external disturbances [13–15]. The robust control theory is suitable for the uncertainties model, which makes a closed-loop system stable and satisfies some specified performance. Singular system is a kind of general dynamical system, and many systems are described more simple and natural by singular system [16, 17]. Recently, increasing attention has been paid to the studies of singular system; some solutions of general systems have been generalized [18], but now, its research needs deep development. Nonfragile robust control theory is widely used in industry, military, aviation, spaceflight, and so on, which have a large proportion of robot control, and it has been an important branch of automation.
The previous control theories are difficult to be applied in the complex terrain and changeable environment. In this sense, the ramp road walking state should be described as the equations. They are to establish the controller for the ramp road walking simulation. Based on the quadruped bionic and VRML model of Virtual Reality Simulator [19], the autonomous quadruped search robot is used to carry out the specific search work in this paper. It can take the place of the traditional search team in disaster site. In the dissertation, the uncertain discrete singular system is studied by linear matrix inequations (LMI), and it is studied in the robust performance of reduced-order control. A guaranteed cost nonfragile robust controller is designed for the ramp road walking simulation of quadruped search robot.
2. VRML Model of Quadruped Search Robot Walking Environment
VRML is virtual reality modeling language. VRML file includes VRML file header, node model, script, routing, prototype, and annotations. VRML and Simulink of Matlab provide a dynamic system modeling, simulation, and analysis of integrated environment. They are the system design and simulation tools, block diagram interface, and the interactive simulation capability. The module database of them is very abundant, so they can be precise modeling. In the process of simulation, it can modify the parameters such as the callback, the virtual reality toolbox, and S function to create graphics and animation. The virtual reality toolbox can to simulate the physical system. It can greatly improve the reliability and scientificalness of the simulation results.
2.1. The Establishment of Tree Model
Trees are the most important elements of field surface. It has obvious space-time rhythm and independent landscape, but also an indispensability foil of terrain. Usually in the face of numerous varieties of trees and their complex shape, it will affect the scene rendering effect. So Billboard nodes are generally used by mapping to construct the plant model. When we browse Billboard node, it can dynamically change their coordinates and the node contains all the objects which are presented in order to achieve approximate 3D terrain effect. But it is not suitable for the terrain dynamic continuous simulation when the scene update. VRML advanced modeling method is used through the point-line-surface modeling to create 3D modeling of virtual trees. The effect for VrmlPad modeling environment of trees is shown in Figure 1.

Trees in VrmlPad modeling environment.
2.2. The Establishment of Terrain Model
For the construction of environment terrain, the current main methods have taken the contour model, grid model, and triangulated irregular network model. We focus on the static and dynamic terrain model and design the median tectonic topography method with constraints based on Delaunay triangulated irregular network method.
2.2.1. The Generation of Contour Data
The geometric parameter method of straight line instead of the curve is used to set up the original data of topography. According to the height of the isohypse line, terrain stack is classification and order. It takes the terrain height of the lowest layer to the bottom of the stack. In accordance with the altitude, it gradually increases height and layers. The isohypse line data of each layer is sorted in counterclockwise direction. Then it stores number of nodes and the actual 3D coordinates of each point with array form in each layer. The effect for VrmlPad modeling environment of terrain is shown in Figure 2.

Establishment of a basic terrain model.
2.2.2. Delaunay Triangulation Subdivision Method
The terrain model of Figure 2 has obvious quadrilateral characteristic and it is not smooth, so the model needs grid data for optimization. That is a point in the Euclidean plane sets. These points are not collinear and four points are not in one circle. It takes the terrain height of the lowest layer to the bottom of the stack. It helps to improve the contour model of square characteristics, so the stack of the natural terrain points is for Laplace interpolation. According to the Delaunay criteria (empty circle characteristics and maximizing the minimum angle characteristics), a new node to the stack unit is inserted. The node is connected with the new node joining the new contours triangulation.
2.2.3. Optimization of Delaunay Triangulation Model
In anticlockwise order, the terrain stack data of X-Z surface and Y-Z surface are read. Two separate lists are set up. The convexity of the each original geometric node of the two lists is calculated. The convexity of original geometry node is constraint condition and every pair of adjacent convex point is median smooth. A new added node value is replaced by the mean value of each sample in a neighborhood of the point. It generates the monotonically two-dimensional data sequence. It gets around the value close to the smooth value. The isolated point and region are eliminated. The vrmlpad modeling of the median optimization Delaunay terrain model is shown in Figure 3.

Constraint values optimization of Delaunay triangulation model.
2.3. Design of the Overall Environment Model
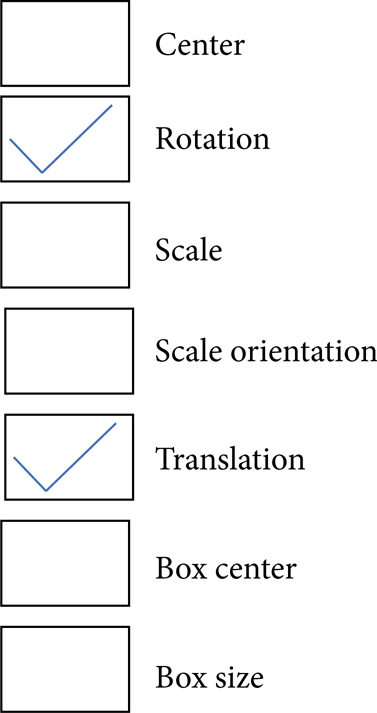
Each part of the overall environment is achieved through the Transform node in VRML. The Transform node includes translation, rotation, scale, and children subnode. Subnode of the Transform node is shown in Figure 4.

The subnode of transform node.
Virtual environment is composed of Viewpoint node, Directional Light node, Time Sensor node, and some Transform nodes. VRML system structure of the whole environment modeling is shown in Figure 5. The scene environment of VRML model is shown in Figure 6.

VRML system structure of the whole environmental modeling.

The scene environment of VRML model.
3. Ramp Walking Model of Quadruped Search Robot
In the simulation of the actual process, the requirements of graphics workstations to robot model are very high. VRML nodes can communicate with each other through the event. Sensor nodes can detect the robot action or time. Simulation environment for the establishment of specific steps is as follows.
The VR SINK is established in the Simulink environment, and it creates terrain environment.
The script file of quadruped search robot is imported (Figure 7).
The parameters of rotation and translation for robot walking simulation can be controlled (Figure 8).
The output screen of robot walking simulation is shown in Figure 9.

Import modeling script.
The walking parameters.
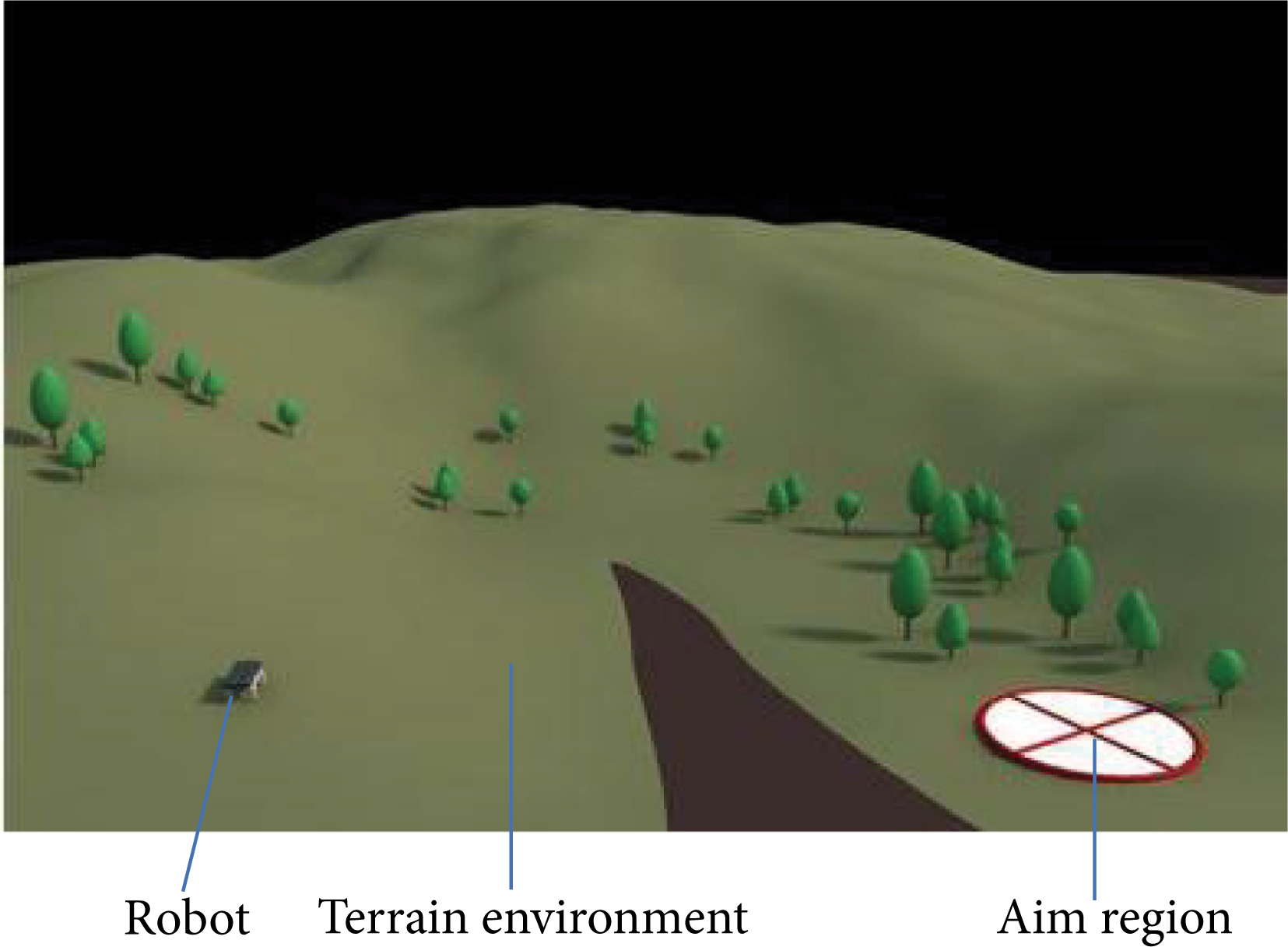
The output of simulation walking.
4. Guaranteed Cost Nonfragile Robust Controller of Walking Simulation
The walking simulation criteria of quadruped search robot are as follows: (1) the quadruped walking is always periodic motion; (2) the robot body do not collide ground. Motion control of quadruped search robot is uncertain discrete singular system.
The ramp road walking state of quadruped search robot simulation is considered by the following equation:

where x(k) ∈ R
n
is state variable of ramp road walking and u(k) ∈ R
m
is feedback control vector of the system stat. A and B are proper dimension of known matrix. E is known real constant matrix with the proper dimension (the motion parameters of stable walking). Guaranteed cost controller can guarantee the uncertain closed loop system robust asymptotic stability, such that the closed-loop system satisfies the desired robust performance.
For the system represented by (1), we can define a performance index:

where Q and R are given by the symmetric positive definite weighted matrix.
To the discrete singular system, (1) and (2) must exist. If the existence of controller u*(k) and J* ≥ 0 for all admissible uncertainties makes the closed-loop singular discrete systems asymptotically stable, and the performance indicators meet the conditions J ≤ J*, J* is performance upper bound of the system represented by (1) and u*(k) is called guaranteed cost control law for the system represented by (1).
Guaranteed cost controller is designed for robust asymptotic stability of the uncertain closed loop system.
Theorem 1. The system represented by (1) has a guaranteed cost controller u(k) = Kx(k). If and only if there exists a symmetric positive definite matrix P ∈ Rn × n, positive definite matrix Y ∈ Rn × n, matrix S ∈ R(n − r) × n, and matrix L, Θ and real number ε > 0, η > 0, H, D1, and D2 are proper dimension of known matrix. Formula (3) is established in

The controller u(k) = Kx(k) = LY−1x(k) is a guaranteed cost controller of the system represented by (1).
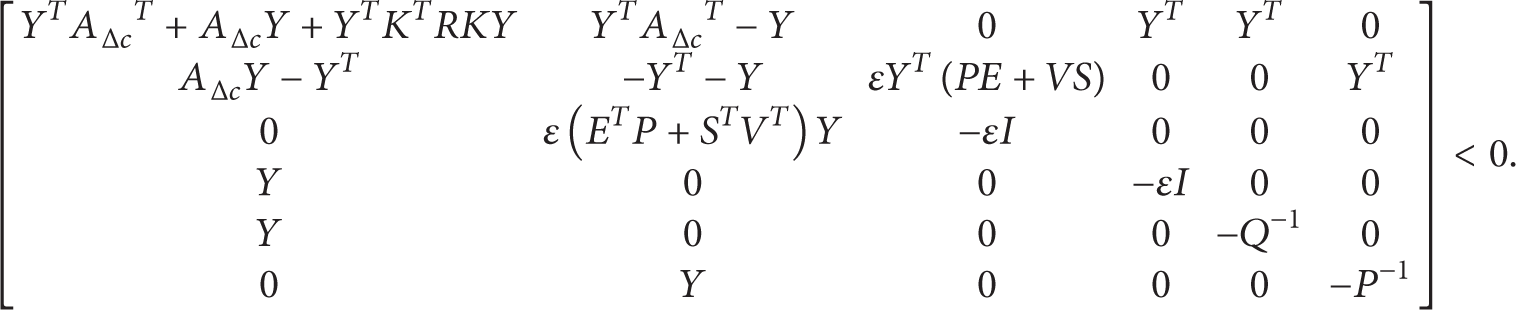
Take the uncertainty of controller to formula

where A Δc = AΔ + BΔK − E, E T V = 0.
Equation (4) is with premultiplication

Let Y = X−1;

The above equation can be written as follows:

The uncertainty of the system is taken into formula (8):
The above formula can be written as follows:

By Schur's theorem, the following formula can be established:
The following formula can be established by Schur's compensation theorem:

The above formula can be written as follows:

The following formula can be established by Schur's compensation theorem:

The above formula can be written as follows:
Let L = KY,
Theorem 2. System (1) has a guaranteed cost nonfragile controller u(k) = KΔx(k). If and only if there exists a symmetric positive definite matrix P ∈ Rn × n, positive definite matrix Y ∈ Rn × n, matrix S ∈ R(n − r) × n and matrix L, Θ and real number ε > 0, ρ > 0, η > 0, D3 is proper dimension of known matrix. Formula (16) is established in
where,
The controller K = LY−1 is a guaranteed cost nonfragile controller of the system represented by (1).
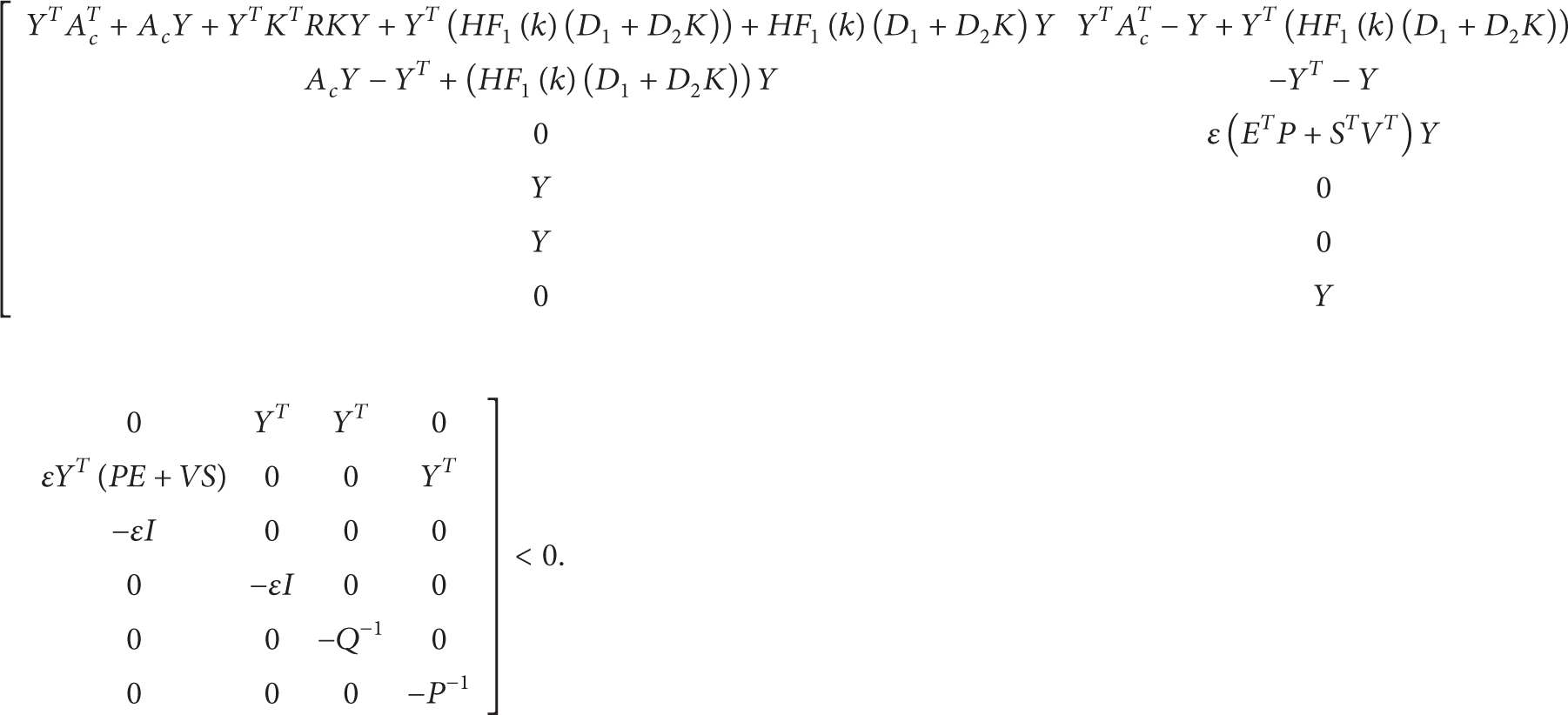
Taking the uncertainty of controller to formula (3),

The above formula can be written as follows:

where,
According to Theorem 1, formula (19) can be written as follows:

The following formula can be established by Schur's compensation theorem:

Derivation is the end.
5. Numerical Examples
The system represented by (1) parameters is obtained by step simulation; the system parameters are as follows:

All of variables and matrices have been defined at the comment of (1) and (2), Theorems 1 and 2 as nomenclature. These parameters are control matrix or control coefficient of rotation and translation for quadruped robot walking simulation. Because K = LY−1 is nonfragile guaranteed cost control laws for of walking state for search and rescue robot, solution of linear matrix inequality is as follows:
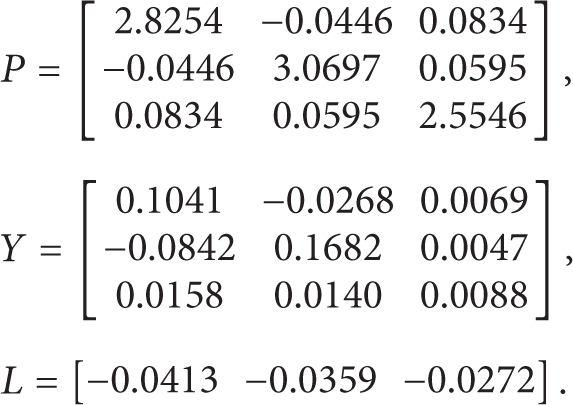
Corresponding guaranteed cost for nonfragile controller is

Set the initial state of the system

The result of ramp walking simulation.

The curve of quadruped robot gravity.
6. Conclusions
The ramp walking simulation of quadruped search robot is researched. Because it is nonfragile control problem, we proposed the method of guaranteed cost nonfragile robust controller on the basis of VRML motion model. The method of this simulation controller is designed. The method is given in terms of linear matrix inequalities with LMI technology. The controller is obtained with linear matrix inequalities solution and the state of the system met the expected variance constraint. Nonstrict problems are solved with the linear matrix inequalities for ramp walking simulation. The guaranteed cost nonfragile robust controller shows a good anticipated control performance. The simulation is significant for gait planning and control strategy, and the simulation test confirms the feasibility of walking stability on a slope.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This work was supported by the National Natural Science Foundation of China (Grant no. 51105122).