
Abstract
In the application of opportunistic networking in wireless sensor network, the technology of target recognition is very important. However, since the sensor reports are typically inconsistent, incomplete, or fuzzy, the technology of target recognition whereby sensor reports is a major challenge. In this paper, based on the minimization of inconsistencies among the sensor reports, a new optimization model of target recognition is presented by using a convex quadratic programming (QP) formulation. Firstly, the description method of sensor report is introduced and then we talk about how to set up this new optimization model of target recognition by using the wireless sensor network reports and how to calculate the solution of this new optimization model. Finally, theory analysis and numeric simulation indicate that this optimization model can generate reasonable fusion results, which is similar to the Dempster-Shafer (D-S) evidence inference model. Furthermore, in contrast to D-S evidence inference model, this optimization model can fuse sensor reports of the form more general than that allowed by the D-S evidence inference model without additional processes. Meantime, it can deal with the high conflict sensor reports.
1. Introduction
With the rapid development of wireless sensor network technology, it is possible to gather large amount of information in real time from a lot of information sources. Such information must be processed appropriately in order to generate an optimal recognition. In order to reduce complexity in the recognition process and to improve effectiveness of the recognition system, the information collected by different sensors is usually first processed in the locality and only some brief reports are transmitted to recognition center. These brief reports usually take the form of preliminary recognition and are typically imprecise, inconsistent, or fuzzy. For example, the first sensor may describe “it is a hostile strategic bomber with probability 1,” while the second sensor may declare “it is a hostile strategic bomber with probability 0.1.” Obviously within a probabilistic framework, the above two statements are inconsistent and fuzzy. Therefore, the real challenge for the recognition center is how to combine these imperfect sensor reports properly and to get a more reasonable recognition.
The common mathematical model of target recognition is based on Bayesian Inference Model and Dempster-Shafer (D-S) Evidential Inference Model [1]. The former model is well developed in statistical recognition theory, but it suffers from the fact that it requires the knowledge of a priori distribution and the conditional probabilities of sensor reports. In contrast, the D-S evidence inference model does not require such a priori knowledge, but it requires the sensor reports to be of a certain restrictive form and to be not inconsistent or fuzzy.
Convex optimization model is ubiquitously used in communication system [2], signal processing [3], and multisensor information fusion [4, 5]. Furthermore, many engineering problems can be converted into convex optimization problems, which greatly facilitate their analytic and numerical solutions. Therefore, in this paper, based on the convex optimization theory, a new optimization model of target recognition is proposed. The basic idea is to choose a probability distribution which provides an overall best “fit” of the potentially inconsistent sensor reports. It converts the target recognition to a convex quadratic programming formulation [6], which has only a polynomial-time growing computational complexity [7, 8]. Therefore, it can be solved very efficiently in real time. In addition, unlike D-S evidence inference model, it can deal with inconsistent or incomplete sensor reports without any restriction. According to the numerical examples, in contrast to D-S evidence inference model, this new optimization model has a lower computational complexity, better recognition result, more widespread applicability, and stronger robustness.
This paper is organized as follows. Section 1 is the introduction. Section 2 provides a simple review of the Bayesian model and D-S evidence inference model. Section 3 describes basic concepts, main technology, and optimization model. Special emphasis is placed on how to set up the optimization model with sensor reports by using the convex quadratic programming formulation. Section 4 gives the solution method based on the Logarithmic Penalty Barrier Function [9, 10]. Section 5 gives several numerical examples in contrast to the D-S evidence inference model. Section 6 describes the conclusion of the paper.
2. The Common Model of Target Recognition
Suppose
2.1. Bayesian Model
The Bayesian model is one of the target recognition methods, which is based on the knowledge of the a priori probability distribution
These conditional probabilities are assumed to be known and constant. Whenever a sensor report ω is given, the updated probabilities are computed by Bayes' rule, which is shown as follows:


As discussed above, Bayes's rule requires the value of the prior probabilities
2.2. Dempster-Shafer (D-S) Evidence Inference Model
Another model of target recognition is D-S evidence inference model, which has been shown to be effective in approximate reasoning and artificial intelligence and is widely used in practice. This model of evidence reasoning by D-S can assign a probability to any of the original n propositions or to disjunctions of the propositions. For example, a union of
Suppose there are two evidences

According to the formula above, we can know that, if
Therefore, the fused probability measure will be regarded as the final target recognition result. However, since there are exponentially
3. The Convex Optimization Model of Target Recognition
3.1. The Reports of Sensors
For the subsets of propositions
In other words, with certainty

This kind of report form has no restrictions imposed on how the subsets are selected. The selected subsets are not necessarily mutually exhaustive or exclusive.
The following is a simple example; suppose the target recognition framework is
The report of sensor 1 is shown as follows:

The report of sensor 2 is shown as follows:

The report of sensor 3 is shown as follows:

Furthermore, it should be known how to get the relative likelihood
3.2. Optimization Model of Target Recognition
To formulate the problem of target recognition, suppose there are a total of K sensors, which make observations within a surveillance region. Moreover, assume that there are a total of n possible propositions, as specified by

Suppose the sensor reports which are shown in formula (9) and the set of fusion sensor's confidence levels


The basic idea of target recognition is to first set up a cost function for each sensor report and then minimize a weighted sum of all the cost functions subject to the probability constraint which is shown in formula (11). Intuitively, the cost function should measure the difference between
There are many cost functions which can be used; for example,



In this paper, the first cost function is used, which is shown in formula (12), with

For the cost function

If

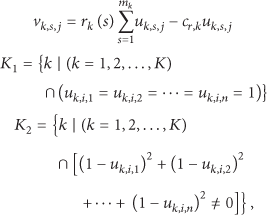
Now the problem of target recognition as the following convex quadratic programming problem can be formulated. Minimize


Furthermore, by decomposing the formula (19), the standard form of convex quadratic programming can be gotten as follows:

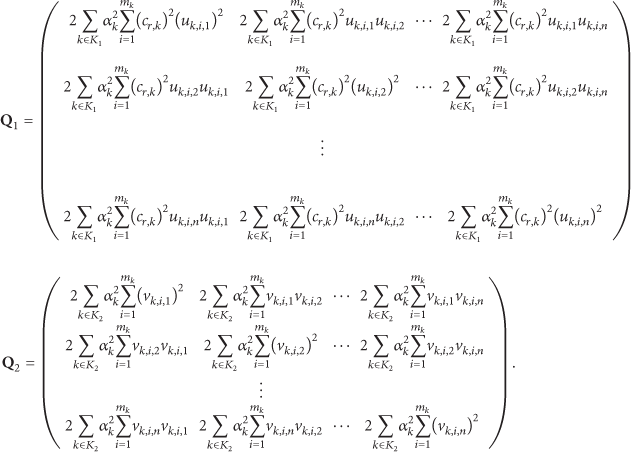
Therefore, according to each sensor report, the recognition center can get the
4. The Solution Method of Optimization Model
The above linearly constrained convex quadratic programming problem has n variables with a simplex constraint. Furthermore, in contrast to D-S evidence inference model which has exponential time complexity, the new optimization model has only polynomial time complexity. Therefore, it can be solved very efficiently. In this paper, the solution method of Logarithmic Penalty Barrier Function is introduced to get the optimal solution
Suppose μ is the penalty factor and

Furthermore, the solution method of formula (25) can be converted to solve the formula

If the solution of formula (27) satisfies

In this paper, the iteration steps satisfy, where

In sum, the steps of solution method for formula (21) are shown as follows.
(1) Choosing the proper parameter, including
(2) According to the
(3) According to formula (29), the iteration step (or

(4) Getting the iteration solution with the following formula:

(5) Preparing for next iteration process. Make
5. Numerical Simulation and Analysis
Suppose target recognition framework is

(1) Numeric Simulation Example One. Suppose
Report from Sensor 1:

Report from Sensor 2:
Report from Sensor 3:

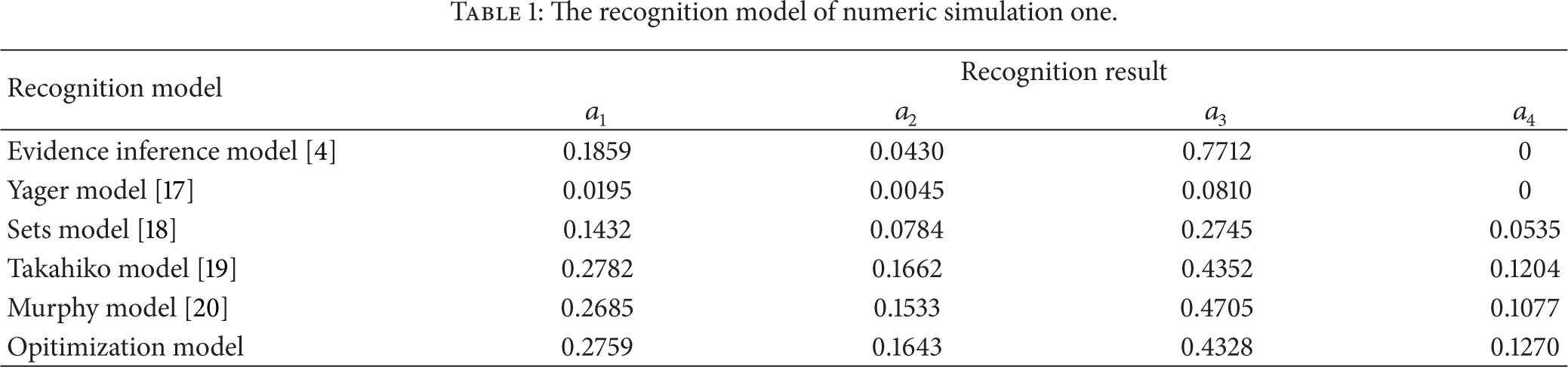
The recognition result is shown in Table 1. In order to make much better comparison, five different D-S evidence inference models are selected. According to Table 1, convex quadratic programming model has the same recognition result with D-S evidence inference model; the recognition result is
The recognition model of numeric simulation one.
(2) Numeric Simulation Example Two. Immediately following the above simulation, suppose, because of the distractions, the third sensor report is changed, which is shown as follows. Meantime, the reliability degree of this sensor report is
Report from Sensor 3:

According to Table 2, if the sensor is disturbed, the recognition center will receive wrong reports. D-S evidence inference model will lead to the wrong recognition result. However, convex quadratic programming model takes the reliability degree of every single sensor into account; therefore it can still get the right recognition result of
The recognition result of numeric simulation two.

(3) Numeric Simulation Example Three. Suppose
The recognition result of numeric simulation three.

Report from Sensor 1:

Report from Sensor 2:

Report from Sensor 3:
According to Table 3, the D-S evidence inference model cannot effectively fuse with such high conflict sensor reports. Yager method and Sets method will make unreasonable recognition result. Takahiko method and Murphy method can get reasonable recognition result, but they need much more complex processes. Convex quadratic programming model has the same recognition result with Takahiko method and Murphy method without complex processes. Therefore, it can deal with high conflict sensor report in real time.
(4) Numeric Simulation Example Four. Suppose
The recognition result of numeric simulation four.

Report from Sensor 1:

Report from Sensor 2:

Report from Sensor 3:

As well known, the D-S evidence inference model needs strict form of sensor reports; the subsets of propositions
6. Conclusion
In this paper, a new optimization model of target recognition is proposed. According to the theory analysis and numeric simulation, this new optimization model has the similar recognition performance with the D-S evidence inference model. In addition, in contrast to the D-S evidence inference model, it has some additional advantages. For example, in the optimization model, the reliability degree of all sensors is considered; therefore, it has much stronger anti-interference and robustness. Meantime, it will have much better accuracy and stability in complex noise and interference environment. In addition, the D-S evidence inference model needs to consider all possible subsets of propositions, while this new optimization model only needs to assign probabilities to each individual proposition. Finally, this new optimization model can deal with high conflict sensor reports without additional processes and has only polynomial computation complexity.
According to the discussion in this paper, in order to use the new model in practice, there are three questions needed to be solved in the future. The first question is how to get the sensor reports in different application environment. The second question is how to get the confidence degree of all sensors which can best fit to the real situation. The third question is how to further decrease the computation amount of solution method.
Footnotes
Conflict of Interests
Meantime, all the authors declare that there is no conflict of interests regarding the publication of this article.
Acknowledgments
This work was supported by the Nation Nature Science Foundation of China (no. 61301095 and no. 61201237), Nature Science Foundation of Heilongjiang Province of China (no. QC2012C069 and F201408), and the Fundamental Research Funds for the Central Universities (no. HEUCF1408).