
Abstract
The popularization of consumer electronic products and the promotion of digital mobile devices have assisted telematics services in becoming more important and practicable. The global positioning system (GPS) is commonly used today and context awareness technologies are often adopted. To support efficient and effective telecommunications between a huge number of devices and the intelligent transport systems (ITS) services, a scalable networking platform is hence demanded. In this study, we present a novel approach to support an open architecture environment for telematics services based on international standards. The proposed core telematics platform (CTP) can optimize the data transmission under linearly increased time complexity by employing a high-scalable architecture design when a large number of devices connect to the application servers. The proposed context awareness application server (CAAS) approach can optimize context awareness features to provide personal tracking services to children and elders for safety purposes. The simulations and experiments in this study have verified the effectiveness of the proposed approach.
1. Introduction
Wireless vehicular networks are an emerging technology that experiences rapid advancements with an active field of research, development, and standardization. Numerous national and international projects in the government, industry, and academia are devoted to wireless vehicular networks throughout the world. These projects include consortia such as the Vehicle Safety Consortium (US), Car-2-Car Communication Consortium (Europe), Advanced Safety Vehicle Program (Japan), standardization efforts such as IEEE 802.11p (WAVE), and field trials such as the large-scale Vehicle Infrastructure Integration Program (VII) [1] in the US. VII field trials are mainly focused on telematics platforms that are related to the IEEE 1609 protocol. The wireless access in vehicular environments (WAVE) [2, 3] developed a set of standards for broadband wireless access in vehicular environments and was designed for high-speed intelligent transportation systems (ITS) with a peak rate of up to 54 Mbps, supporting various multimedia services. To facilitate drivers by providing important traffic information, ITS engages the important role of gathering and disseminating relevant information among vehicles [4, 5]. Figure 1 shows a diagram of the WAVE radio stack protocol.
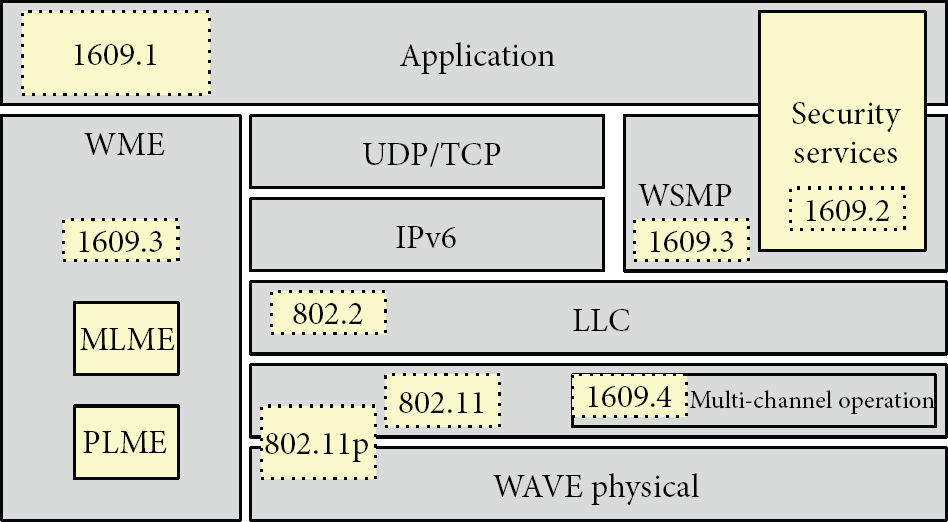
WAVE radio stack protocol.
Telematics is an emerging technology combined with telecommunications and informatics to convey information over vast networks to provide services, such as vehicle tracking, fleet management, and emergency warning [6]. Particularly, with satellite navigation and geographic information, many innovative telematics applications can be developed to make life easier. Today, global positioning system (GPS) has been widely employed in vehicle on-board units (OBUs) and personal navigational devices (PNDs). With the increasing usage of these mobile devices, a variety of location-based services (LBS) become crucial to provide people with more convenient services. Research on telematics technologies thus becomes an important issue.
Intelligent transport systems (ITS) also focus on how location information could be employed in a wide range of applications to make people live smarter [7]. Therefore, ITS services usually require information frameworks and mobile communication networks for developing much-needed transportation infrastructure with LBS applications [8, 9]. Vehicular and cellular networks are considered to be a key feature in mobile computing networks for telematics applications [10–12]. Due to the mobility of vehicles and huge context information, how to develop a scalable telematics platform to support a large number of mobile devices is a challenging issue. Particularly for large-scale ITS application services, a real-time networking platform is highly demanded to handle a vast amount of probe information and reliable data communications [13].
In the past studies on ITS services, although the ideas of a service-oriented architecture (SOA) and a middleware platform have been studied before, many works still focused on application-specific ITS services regardless of the scalability design [8, 14–17]. For large-scale ITS applications, however, a scalable telematics platform is demanded to support the diverse service needs. Although Bisdikian et al. [18] have considered a scalable telematics platform, the performance has not been studied in their middleware services. In this paper, a high-scalable core telematics platform (CTP) is proposed to manage vast context information, real-time data communications, and diverse event triggers for OBUs/PNDs over different mobile communications. Figure 2 illustrates the design concept in which CTP plays the key role of a middleware platform to communicate between various applications services and OBUs using different mobile communication networks, such as UMTS, WLAN, and WiMAX. In fact, CTP is not limited to the communication networks mentioned above and can be extended to support other advanced IP networks, such as long term evolution (LTE).
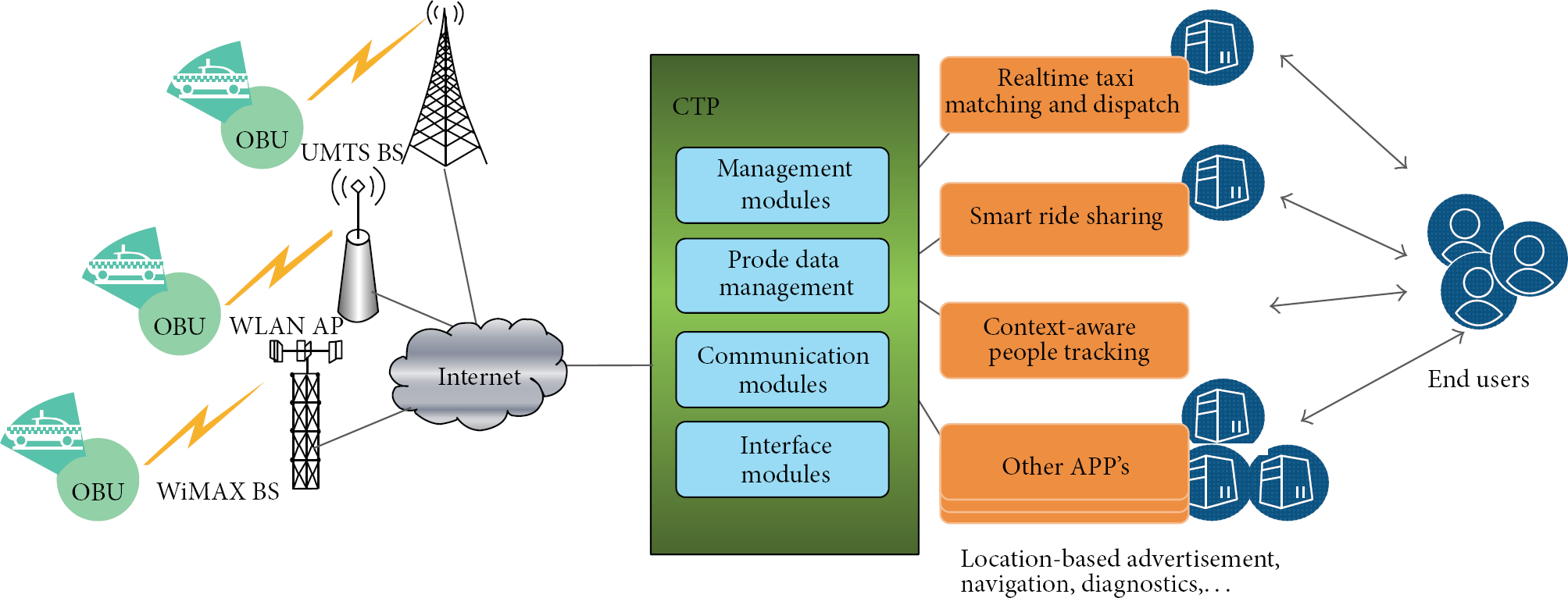
The design concept of core telematics platform (CTP).
The major features of CTP include extensible context type, synchronous/asynchronous communication, scalable handlers, and universal application interfaces:
extensible context type: the supported types of contexts can be configured after the system is deployed; synchronous and asynchronous communication: bidirectional communication between applications and OBUs will be stored in a message queue in CTP. Hence, CTP can handle communication errors and try to do retransmission if it is requested. Secure communication is also supported to protect privacy of OBUs; scalable handlers: handlers are responsible to handle the data transmitted from OBUs. Because a large number of OBUs are expected, CTP is able to distribute traffic to multiple machines; universal application interfaces: different kinds of applications have different needs. As a middleware to support various applications, the provided application interfaces should be as general as possible. For this goal, some services are designed, including core telematics service (CTS), advanced telematics service (ATS), geographical service (GEO), legacy service (LGC), communication service (COMM), and authentication service (AUTH).
This study presents our approach to use the data mining algorithm for conveying and managing the transportation mode of the proposed system. The remainder of this study is separated as follows: Section 2 introduces brief background reviews related to the context awareness over the telematics system and reviews related work of ITS platforms and Section 3 provides a description of the proposed context awareness application server system model. We cover the basic components of the generic architecture of context awareness application server within the telematics system, including real-time monitoring and personal mobility analysis; Section 4 describes the CTP system architecture and the design details; Section 5 presents the simulation results, clarifying the accuracy performance of the proposed scheme; and Section 6 offers a conclusion.
2. Background
Telematics is a relatively new applied research area. With the evolution of telecommunication and informatics, more advanced telematics platforms are developed for ITS applications and LBS services. Based on our recent survey, studies on ITS platforms fall into two general categories: application-specific platforms and multipurposed platforms. An example of the former is a taxi routing service platform in [8]. Examples of the latter include more service-oriented infrastructures for provisioning, managing, and developing telematics services [13–22]. Most of them are service-based approaches to support the structural and behavioral adaptation of automotive telematics.
In [21], Han et al. proposed an architecture of a gateway and framework, which plays a similar role of our core telematics platform (CTP), to solve the problem of telematics server systems. Nevertheless, they did not provide an experimental environment to evaluate the performance benchmark of the number of supported vehicles and the transaction rate. Although some past studies have considered the scalability issue, the performance has not been really verified in their telematics platforms [18, 22]. However, our CTP shows the superior scalability performance to support various ITS services with an ordinary workstation and PCs.
Wireless vehicular networks are a critical technology for automotive electronics applications and ITS. The integration of sensors, actuators, computer processors, wireless communication devices, and custom human interfaces assists the realization of intelligent vehicles that provide drivers with required information under difficult driving conditions. Applications such as infotainment, telemetry, safety, and control require the use of several networking standards. However, the incorporation of these applications requires a range of advanced and reliable network technologies and protocols that enable the efficient and effective networking of distributed electronic systems in a vehicle. Furthermore, advances in radio communications, video/audio compression, and computing and integrated technologies are enabling efficient and robust in-car multimedia applications over wireless networks, ranging from multimedia communications to networked entertainment systems. Therefore, there are numerous technical challenges to support real-time multimedia and quality of service (QoS) over wireless access networks because of variable communication environments and heterogeneous devices. There are many major problems such as spectrum limitations, quality assurance for systems, energy efficiency of mobile clients, and user mobility in wireless communication. We are particularly interested in the issue of user mobility. Schindelhauer [23] surveyed mobility patterns for cellular networks, mobile ad hoc networks, and sensor networks. The mobility patterns are classified into the following types: pedestrians, vehicles, aerial, dynamic medium, robot, and outer space motions. To measure a mobility pattern, one needs to track a large number of nodes for a long period of time. In fact, this is a very suitable application area for wireless sensor networks specialized in localization. Thus, the mobility patterns of sensor nodes can be measured and modeled by localization. Our critical research topic advances towards the development and introduction of a context awareness application server based on a core telematics platform (CTP) for mobile communications, while considering the scalability and interface issues.
The emerging telematics is considered a key feature in mobile computing networks such as vehicular networks or cellular networks. Cars in the near future may potentially be equipped with numerous embedded computing platforms that are capable of running general purpose applications. In a vehicular network, an on-board unit (OBU) may attach from one road side equipment (RSE) to another RSE or a base station in another wireless network when travelling. When integrated into a transportation system infrastructure (through RSEs) and vehicles (through OBUs), these technologies assist the monitoring and managing of traffic flow, reduce congestion, provide alternate routes to travelers, and save lives.
The traditional user mobility tracking algorithm cannot satisfy the requirements of a real-time context awareness information system; thus, researchers have proposed several methods for context-aware automotive telematics systems. In Wang and Wu [24], two unmanned vehicles were built up, each consisting of a platform moving with four wheels. On the platform, a computing/control unit and sensors are mounted. A GPS receiver is used to determine the position of the vehicle up to centimeter accuracy level. The accuracy was achieved by using the carrier-phase differential GPS algorithm. In Hartenstein and Laberteaux [25], the way to obtain information is to use data provided by integrated sensors in the vehicles, and the sensors provide information on environment parameters such as temperature, light intensity, position (GPS), speed, or road surface condition (ice, water, etc.). Kim and Lee [26] present an approach to utilize Universal Plug and Play (UPnP) as a telematics service discovery mechanism for local hot spots. Usually, UPnP is used as middleware in network environments, using the UPnP service discovery mechanism, a car can discover the local services automatically and use them without a priori knowledge about the local hot spots and its network locations. Ioannis and Poulicos [27] provided a map matching algorithm to support online car navigation systems using a GPS receiver for location estimation. Study [28] showed a method for the offline classification of transportation modes from an iPhone accelerometer, achieving reasonable accuracy training and testing on the same subjects. However, the study did not extensively examine the training of one set of subjects and testing of unrelated subjects. Maximizing the throughput during tens of second intervals is crucial for overcoming the obstacle of limited connection times from the mobile station (MS) in the underground mass rapid transit (MRT) system. Lai et al. [29] and Chang et al. [30] showed a power saving mechanism that integrates the accelerometer and Wi-Fi devices to facilitate opportunistic communication while conserving power. This method defines the motion of a train into four phases: enter phase, stop phase, start phase, and leave phase. Each phase adopts a specific rate adaption mechanism. Due to the limited transmission range of WiFi devices, the signal quality varies highly when train arrives at or departs from the station. Moreover, Liao et al. [31] constructed analytical hierarchical Markov models that can learn and infer a user's daily movements throughout an urban community. The model uses multiple levels of abstraction to bridge the gap between raw GPS sensor measurements and high level information such as a user's destination and mode of transportation. This approach predicts the next mode of transportation based on the current and the previous modes. In contrast to our approach, their model is not able to refine the mode estimates using GPS information observed when moving from one significant location to another.
Zhang et al. [32] presented and implemented an OSGi-based service-oriented infrastructure for context-aware automotive telematics. Tran et al. [33] used a service-based approach to support the structural and behavioral adaptation of automotive telematics. The structure enables the separate development of telematics and the management of context and adaption. However, much work is required to provide modeling/implementation methods and tools for supporting developers with such an approach. Choudhury et al. [34] developed a context-aware framework to address the diverse communication needs of a modern enterprise. This method determines an optimal request-to-agent routing based on several metrics of effectiveness depending on the communication context. Zheng et al. [35, 36] showed an approach based on supervised learning that automatically infers users' transportation modes from raw GPS logs, including driving, walking, taking a bus, and riding a bike. This approach comprises three parts: a change point-based segmentation method, an inference model, and a graph-based postprocessing algorithm.
Song et al. [37] proposed a smart educational agent that uses location awareness technology such as GPS and dialogue-based feedback systems to provide real-life situated learning environments to users. Ma et al. [38] proposed a service-oriented computing (SOC) architecture based on context awareness. A definition of the context (based on ontology) is provided when in open environments such as the Internet. Moreover, this study shows a supporting environment for the context-aware SOC, which focuses on service on-demand composition and context awareness evolvement.
We present our study on the basis of a high-scalable core telematics platform (CTP) that can be used to deploy a variety of intelligent transportation applications. CAAS is a CTP-based application service and can identify the current context of the user by analyzing dynamic data from clients, which is essential for potential extensions to numerous mobile services. CTP is a platform that connects between multiple users, CAAS, OBUs, and GPS trackers. It stores the information (e.g., latitude/longitude/speed) sent from an OBU or GPS tracker into a database and provides several functions for processing the requests from CAAS. An OBU is embedded into each vehicle to connect to the CTP for transmitting updated vehicle statuses such as vehicle location, on-board diagnostics II (OBD II) information, and sensed information (e.g., engine load, remaining fuel, and tire pressure).
3. Context Awareness Application Server System Architecture
3.1. CAAS System Model
In our study, we built a GPS-assisted wireless application to validate the design and implementation of the telematics platform and provide services to end users. Figure 3 shows that CTP collects and analyzes the vehicle status to provide necessary vehicle-related information to various application servers. CTP administrators can add/delete/modify the information (e.g., user/device/vehicle) stored in the database. Thereafter, CAAS users can login to CTP and link to the permitted service GUI. They can register the events of CAAS if they have management privilege. In the same manner as all other CTP-based application servers, CAAS accesses the CTP for service provisioning, GPS device connections, and common utility functions. Furthermore, it provides personal tracking services to children and elders for safety purposes. Figure 3 shows the proposed system model with CAAS. The CAAS service logic package classes include the communication module, CAAS handler, notification handler, and utility. The communication module is used to process incoming XML data from the XML interpreter. The utility package includes the database connection, XML parser, and sending request through the CTP broker. The advantage of utility package is designed as an object-oriented programming model and this utility package is easily called by CTP when required.
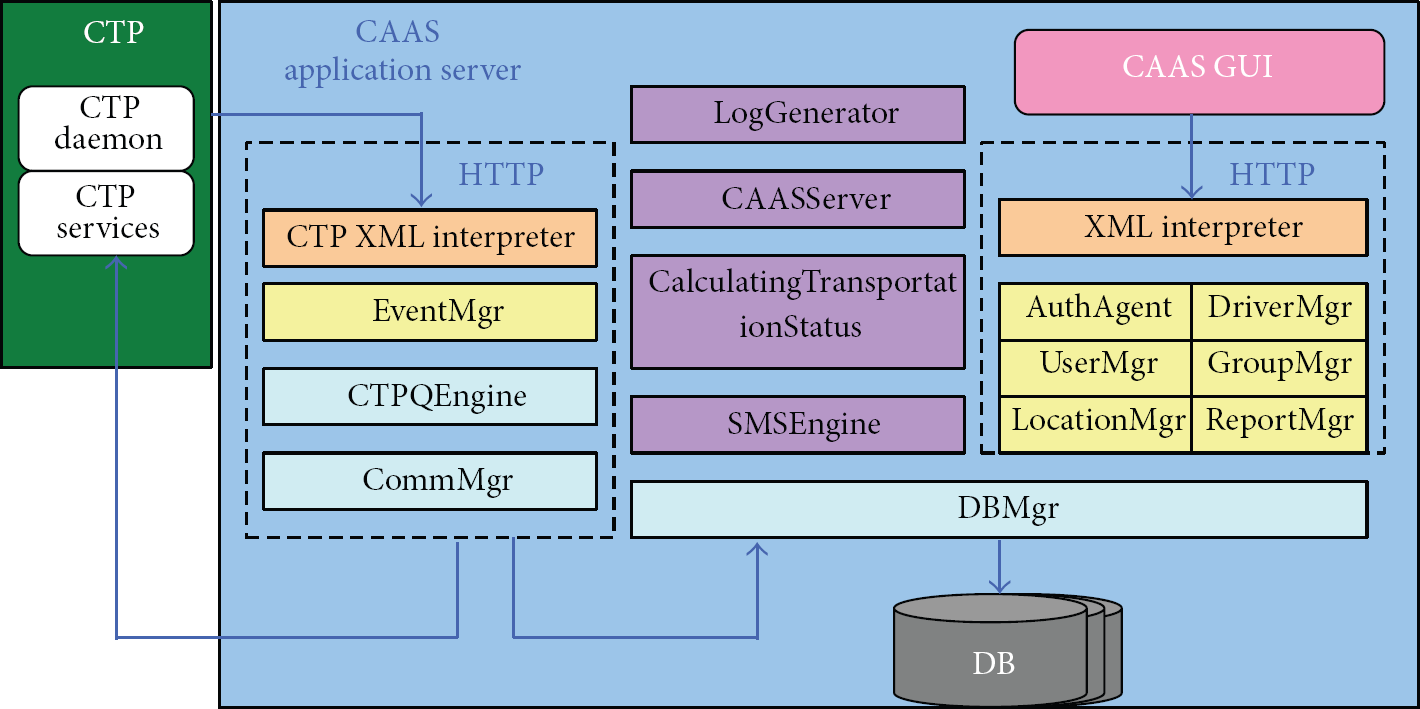
Core CAAS main functions.
3.2. The Main Functions of CAAS
A core routine is required for executing the key algorithm to calculate and interpret the absolute GPS coordinates and reflect the real-time tracking and transportation mode. The CTP processes are described as follows: the CAAS core module initially obtains context raw data from CTP coordinates and the CTP is responsible for collecting all the various types of raw data into a centralized interface in the upper layer. The previously saved static data in the CAAS database are accessible from the software sources or hardware system logs. The context interpreter is the main function, which constantly receives real-time raw data from sources and translates them to high level information. The context interpreter implements the data mining algorithms that are responsible for determining the user's current transportation mode such as on foot, motorcycle, or bus from other contexts based on GPS coordinates, speed, acceleration, and served units. There is one routine that triggers the transportation mode to OBU when the user's current mode of transportation changes. The CAAS manager has a knowledge base that can provide a flexible, scalable, and reliable query interface to context services, which can retrieve context information using both query and subscription/notification mechanisms. The different types of context services can adapt them into the GUI accordingly. Each component is briefly introduced:
real-time monitoring: every GPS user that is under the surveillance of CAAS is displayed on the map in real time. For security purposes, only the CAAS user can view the GPS users that she/he registers with; personal mobility analysis: when the GPS user is shown on the map, CAAS generates related information to display on the map, such as speed and idle time. Moreover, it provides information regarding user's transportation mode, such as on bus, on foot, or on bike. CAAS can be implemented not only on the aforementioned three transportation modes but also on other kinds of transportation modes. However, on car, on taxi, or on train influence the motion velocity, which is not picked from a rule-based model. For example, on train mode is a special mode that occurs only when the motion velocity is fixed for significantly long time; geofence protection: GPS users have their own geofence that is previously defined by CAAS users. When GPS users enter or exit a certain geofence, CAAS sends an alert to the previously provided designated contact; tracking and behavior report: CAAS provides a map tracking and behavior report. Behavior reports show the distribution of time that each GPS user spends in different geofences and under different transportation modes. This function can extend the usage of CAAS from safety to personal health and business management.
3.3. The CAAS OBU Device
The CAAS OBU is a new design that achieves high performance and supports multiple applications in a vehicle. The OBU core is a middleware between the CTP and OBU clients to allow one OBU core to simultaneously support multiple OBU user interfaces. The OBU core must connect CTP's authentication handler to perform authentication when it is initiated; thus, it initiates connections to the CTP communication handler and context handler when it is authenticated. Moreover, the OBU core provides socket interfaces for OBU clients to acquire necessary information such as GPS location, meter state, and OBD-II states, and to communicate with the CTP through the OBU core's communication handler. The CAAS user interface communicates with the OBU core using CAAS logic. CAAS logic is responsible for maintaining connections, sending probe information, and handling events. Moreover, the CAAS client needs to request group members' locations from the CTP web service after receiving the user ID from the CAAS web administration to show group members' locations in Google Maps. Following user login, the CAAS client receives events from the CTP communication handler and displays group members' latest locations and transportation modes. Moreover, the CAAS user interface displays users' updated locations when selecting the Google Maps browsing button and sending the query request to the CTP web service. Figure 4(a) shows the operational appearance with the following elements: transportation mode, location, and alert. Figure 4(b) shows the user's location on the map. If a user desires locating his/her current position, the position-related map data surrounding the user is displayed using a browser with the user's current position and transportation mode marked on the map. This display is triggered when prompted by selecting the central magnifier-like icon. The zoom level of the map is adjusted in accordance with user's transportation mode.

(a) CAAS OBU interface. (b) CAAS with Google Map.
4. Core Telematics Platform System Architecture
The design of core telematics platform (CTP) is a middleware platform to handle context collection, communication, data access, and historical data inquiry for supporting various telematics services and ITS applications. The platform architecture and the high-scalability design of CTP are described below.
4.1. CTP Platform Architecture
CTP plays a crucial role of a telematics middleware platform to communicate between OBUs and application services. In Figure 5, application services, such as smart fleet management application service and carpooling application service, can access all the accessible data belonging to them from OBUs via socket connection. The context data carried by OBU probes and the OBU forwarded messages are collected in the database for further access by the aforementioned application services. For security concern, all the data communications and probe information are encrypted using a 128-bit advanced encryption standard (AES) algorithm. The functional design of each component in CTP is elaborated below.
Communication forwarder is to send messages from OBUs to applications. All the forwarded messages will be transmitted through HTTP protocol. Communication handler is to receive messages from OBUs. These messages are expected to be delivered to the specified application services. To enable scalability, communication handlers can be executed on multiple machines. Authentication handler is a standalone process which is able to verify login requests from OBUs. Context handler is to receive probes from OBUs. To enable scalability, context handlers can be executed on multiple machines as well. Daemon is a process which would be waked up periodically to do some routine jobs such as event triggers. Graphical user interfaces (GUIs) provide a set of web pages such that CTP administrators can use them to configure this middleware platform. These interfaces support the management of users, vehicles, navigators (OBUs and PNDs), applications, and accounts. Authentication service (AUTH) provides a registration/unregistration/query service so applications can specify their own compound relationship (i.e., a valid composition of a user, a vehicle, and a navigator). Communication service (COMM) allows for a communication service for applications. Application services can employ this component to send messages to OBUs. The complexity of various communication underlay would be handled in this service, such as firewall traversal, message fragment, and data encryption. Core telematics service (CTS) provides necessary services for most application servers to enable telematics services. Applications can request static information or current status of an item, for example, a user, vehicle, navigator, or mixed compound. CTS also provides trigger services, which enable applications to register/unregister a specific event. When a registered event occurs, CTS will send a notification message to a given URL via HTTP protocol. Advanced telematics service (ATS) provides advanced services for some application servers to facilitate the development of telematics services. Application can request historical information of an item (e.g., a user, vehicle, navigator, or mixed compound). Geographical service (GEO) provides a set of services related to geographical information, such as route query, POI query, and geocode/reverse geocode query. The content owner of this service should be any 3rd-party content provider, such as UrMap or Google Map. Legacy service (LGC) provides some specific functionality for applications. These application-specific functions are defined only for certain application, and, thus, they are usually more efficient than other general services, such as CTS.

The system architecture of core telematics platform (CTP).
4.2. High-Scalability Design
Considering a large number of in-traffic reports from OBUs, we design three mechanisms in CTP to support high-scalability. First, CTP is designed to support horizontal database partition. All contexts, including current contexts and historical contexts, will be stored in multiple databases on different machines. Such a horizontal partition design can greatly solve the bottleneck when the number of OBUs keeps growing. Second, the context information reported by an OBU is designed to be associated with a session ID instead of a user, a vehicle, or a navigator to ensure that all contexts from an OBU will be kept in the same machine. The reason why the vehicle ID cannot be used is because M2 M applications such smart grid service can be further developed and extended on CTP in the future. Therefore, CTP's session ID make it a platform for diverse applications beyond the ITS domain, which use a general purpose ID instead of specific vehicle ID. In addition, the ID remains valid as long as a specific user, vehicle, or navigator for the duration of that user's visit (session). Every time a user visits a CTP, a new session ID is assigned. Closing a socket connection and then reopening and visiting the CTP again generate a new session ID. In some cases, The CTP terminates a session and assigns a new session ID after a few minutes of inactivity. Third, CTP provides several mechanisms to support a one-to-many service request: the static rule in the core telematics service (CTS) can have multiple targets, the communication service can have multiple messages in a request, and all services share one single URL.
Figure 6 illustrates the concept of horizontal partition in CTP with three sets of partition databases. The high-scalable CTP design is not limited to three sets of partition databases and can be extended in order to support more devices according to the scalability request. The master database keeps most of CTP data except for the contexts. The contexts are distributed to the partition databases. Each context handler is associated with a partition database in its local machine. The distribution is done by the AUTH handler. After a successful login process, OBU can get a unique session ID and a context handler. Then, OBU can use this session ID to report its context to the corresponding context handler. On the other hand, the service layer needs to be aware of the partition databases. For CTS and ATS, they may need to fuse all contexts from all partition databases to respond a request. The high-scalable design of the CTP can efficiently share the load of the number of vehicle connections from vehicles and context information probed by of OBUs/PNDs because the incoming data are well dispatched to the three context handlers with database clusters. Once the simulated data can be completed in any of the three context handlers, it can process more data. In Figure 6, the TPS performance can thus be linearly improved when the numbExpeer of context handlers increases.

The high-scalable design with horizontal partition in CTP.
5. Experimental Evaluation
In order to assess the scalability performance of CTP, we set up an experimental environment for evaluating the performance benchmark of the number of supported vehicles and the transaction rate. The hardware/software environment is first depicted and then the evaluation results are discussed.
For evaluating the performance benchmark of CTP, the system environment consists of two web servers, three database cluster nodes, one domain name server (DNS), one computer telephony integration (CTI), and one operator machine. Two web servers, namely, web server Node-1 and Node-2, are configured, and each of them includes a copy of core telematics platform (CTP), context awareness application server (CAAS), and fleet management application server (FMAS). The dual-server configuration is helpful to achieve load-balance and failover. Moreover, three database clusters, namely, database cluster Node-1, Node-2, and Node-3, are configured for horizontal partition to enhance database performance. With such a horizontal partition design, the average response time of insertion can be reduced. Moreover, DNS is used to provide round robin and load balance among web servers. Finally, CTI is used to answer automatically the phone or redirect the phone to an operator.
As shown in Figure 7, the hardware environment consists of nine physical machines (one work station with a two core Intel Xeon E5506 2.13 GHz CPU/8 GB DDR2 533 MHz memory for running six XEN virtual machines; eight laptops or PCs, each with at least a Intel Core 2 6300 1.86 GHz CPU and 4 GB DDR2 667 MHz memory for running the database nodes, DNS, CTI, and the operator machine). The database cluster nodes adopt the master/master replication scheme in MySQL to support the fault over functionality. In other words, each node contains at least three machines, two for data storage and one for monitor. In this environment, the data storage runs on individual machines and the monitor runs on XEN VM. Table 1 further presents the database partition environment from 1-set case to 3-set cases. The benchmark is measured on Cent OS 5.5 64 bit for all the physical/virtual machines in Figure 7, except the operator machine.
Evaluation environment.

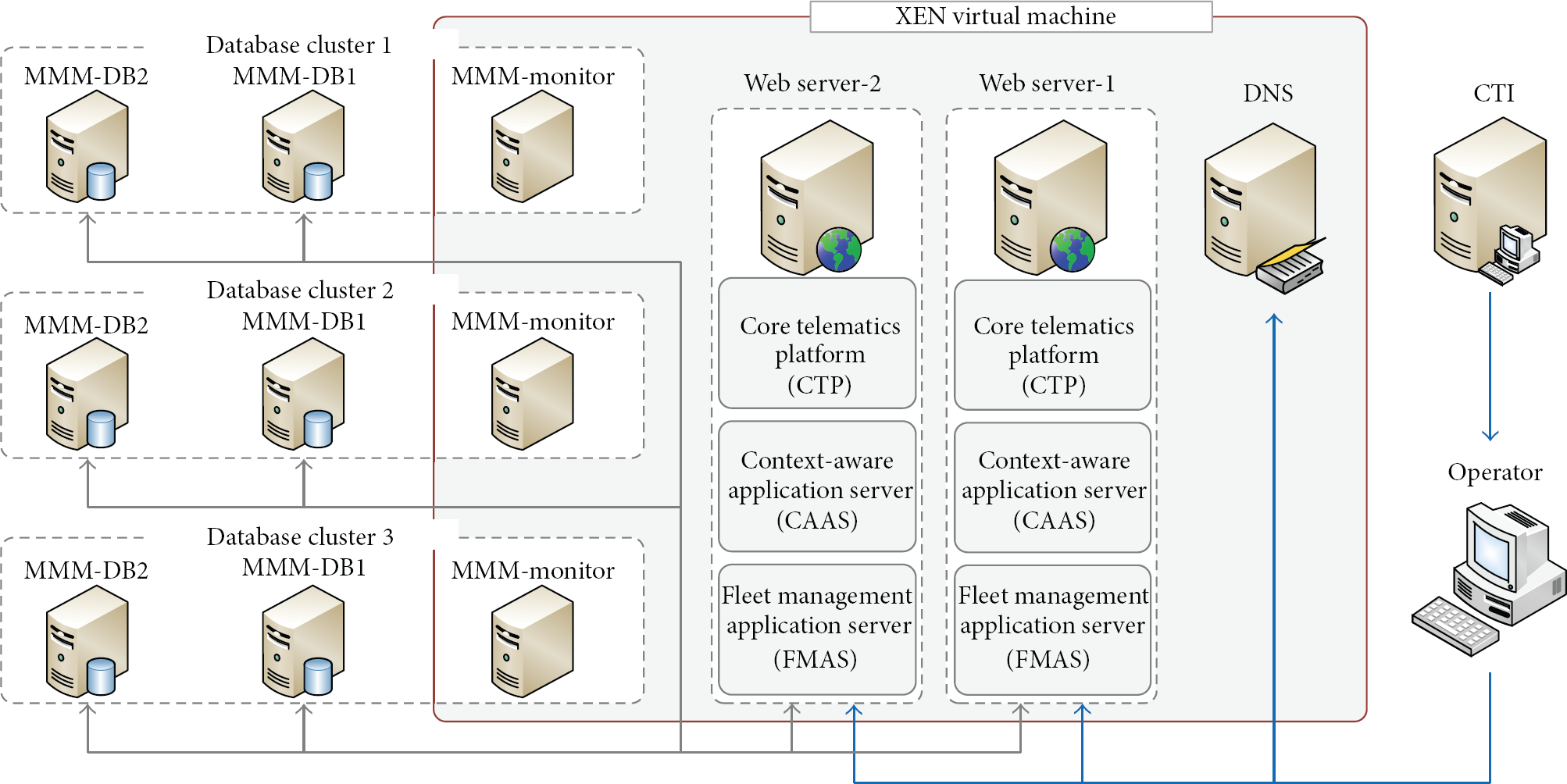
The hardware environment for performance evaluation.
The benchmark in this study is to verify the high-scalability design of CTP. Hence, benchmark testing is conducted by simulating a vast amount of context information probed every 30 seconds by OBUs/PNDs and a large number of events triggered every 4-5 minutes from applications. In Figure 8, the transaction rate is obtained by inserting probe contexts into database clusters. According to the processing time in these three sets of database clusters, each probe record can be completed in 3.3 ms to 6.1 ms in each set of database cluster on average. The transaction rate can thus be estimated as 192 probes/sec, 397 probes/sec, and 694 probes/sec, when the number of database clusters increases from 1 set to 3 sets. Figure 9 in advance shows that CTP can bear over 20,000 OBUs/PNDs with 3 sets of database clusters. Based on the benchmark results, CTP demonstrates its high-scalable architecture, particularly when a vast amount of context information is probed.
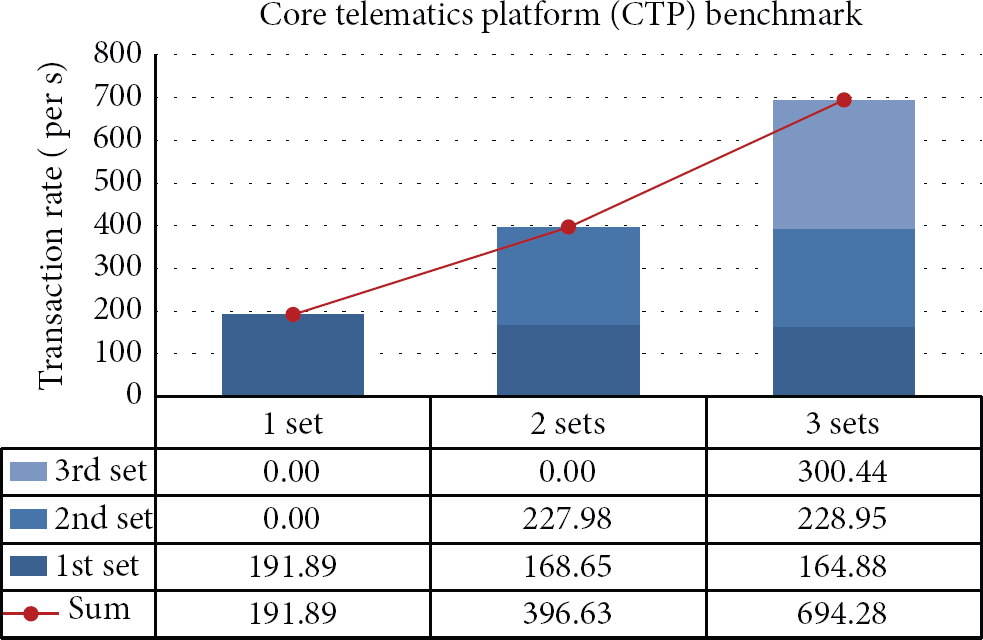
The benchmark on the CTP transaction rate.

The benchmark on the number of vehicles supported by CTP.
When the number of database clusters increases to 3 sets, the transaction rate can even increase by more than 3 times, even over 3.5 times. The number of supported vehicles can also grow to an order of magnitude by increasing the number of database clusters in CTP. According to the benchmark performance, the high-scalability design in CTP is very promising to support a huge number of OBUs/PNDs in intelligent transport systems without extra overhead. Particularly, in large-scale ITS application services, the general bottleneck from immense probe context information can be greatly resolved with such a high-scalable CTP design. In this experiment, the evaluation results of the number of supported vehicles and the transaction rate are based on one run. We furthermore plan to use the average of several trials for evaluating the performance benchmark of CTP.
We chose to experiment on CAAS because it is the most important application in the proposed telematics system. The simulator simulated the behavior of entities in various transportation modes by using the precollected data from various real transportation modes. We collected a 10-day GPS raw data log from a GPS phone. Assume that the transportation modes in the experiment (walking, biking, taking a bus, and not moving) influence the motion velocity. We use the average values of three trials for evaluating the accuracy of the proposed CAAS. In this experiment, we initially focused on the estimation of location and modes of transportation. The rule-based method [39] adapted well in the CAAS environment, and we included particle filter (PF) [40] model groups to compare with the CAAS rule-based method groups. The rule-based method uses a data mining technique aimed at providing logical justification for drawing conclusions. Sets of rules are useful if rules are not too numerous and have sufficiently high accuracy. Rules are used to support decision making in classification. Various forms of rules that allow expressing different type of knowledge are used. In our study, classical prepositional logic (C-rules that have the form of logical propositions If … Then) provides the simplest and most comprehensible way of expressing knowledge. For example, a rule derived from a benchmark dataset on speed and acceleration shows in which conditions recurrence of transportation mode is expected. Algorithm 1 describes the process about our rule-based methods.
// Sense the current user mode of transportation // u: is a current user ID of CTP // // // Calculate the trend analysis between Probe from Decide the transportation mode = “onFoot”∥“Stay” Calculate the trend analysis between Probe from Decide the transportation mode = “onFoot”∥“onBike”∥“Stay” Calculate the trend analysis between Probe from Decide the transportation mode = “onFoot”∥“onBike”∥“onBus”∥“Stay” Decide the transportation mode = “lostSignal”
Algorithm 1
The PF is a variant of Bayes filters and is for estimating the state of a dynamic system. In the integrated framework of particle filtering, Islam et al. presented two techniques for tracking a single moving object in a video sequence using color and shape information [41]. The PF represents posterior distributions over the state space with temporal sets 

(a) Average recall values in the rule-based method and the PF model based on speed changes. (b) Average recall values in the rule-based method and the PF model based on the accelerating speed changes.
6. Conclusion
Nowadays, ITS services are getting more important and essential in people's daily lives, particularly when GPS is becoming ubiquitous today. To realize the availability of ITS, a large number of mobile devices, such as OBUs/PNDs, would be used to provide people with very convenient location-based/context-aware services. Meanwhile, immense context information and service requests from these mobile devices usually become a bottleneck in telematics systems.
In this paper, we present a core telematics platform (CTP) to provide a multipurposed, high-scalable middleware architecture for ITS application services. In CTP, many ITS-required services are designed, such as authentication, context probing, real-time communication, event daemon, real-time/historical query, geographical service, and GUIs for platform management. According to the benchmark, CTP is proved to be a very efficient and effective telematics platform with the high-scalability design. Currently, several ITS applications have been developed on CTP, such as smart fleet management services for taxis, carpooling services for buses, and context awareness services for people monitoring and transportation detection. In addition, CTP not only provides ITS services with a general telematics platform but also serves a large number of vehicles/users as well. Its fully configurable capabilities in advance make it an excellent platform for diverse applications beyond the ITS domain, which cover a broader machine-to-machine (M2 M) field. In the future, more ITS/M2 M applications can be further developed and extended on CTP to provide more convenient services. In this study, we examine the system that CTP plays the key role of a middleware platform to communicate between various applications services and OBUs using different intervehicle networks, such as UMTS, WLAN, and WiMAX. We engaged in a comprehensive analysis of context awareness application server (CAAS) based on a CTP for wireless vehicular networks, while considering the scalability and interface issues. Moreover, this study presents a new distributed traffic information system for computing the transportation mode based on the limitation of GPS raw data. We will strive for the improvement of the prediction performance of CAAS by designing a more sophisticated algorithm in the future.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
The authors gratefully acknowledge the support by the National Science Council, Taiwan, under Grant 102-2221-E-011-068.