
Abstract
The problem of a stable motion for the quadruped search-rescue robots is described as a variance constrained uncertainty in the discrete systems. According to the model structure of the quadruped search-rescue robot, the kinematics of the robot is analyzed on the basis of the D-H parameter. Each joint of the robot angular velocity is planned using the Jacobian matrix, because the angular velocity is directly related to the stability of walking based on the ADAMS simulation. The nonfragile control method with the covariance constraint is proposed for the gait motion control of the quadruped search-rescue robot. The motion state feedback controller and the covariance upper bounds can be given by the solutions of the linear matrix inequalities (LMI), which makes the system satisfy the covariance constrain theory. The results given by LMI indicate that the proposed control method is correct and effective.
1. Introduction
Because the rule of the nature is the survival of the fittest, the survival organism struggles with natural environment through the efforts of a long time hard bitterness [1–3]. They gradually formed a lot of practical skills to adapt natural environment. It makes the mankind take long time to admire and imitate diligently [4–6]. Bionic robot is based on the biological and robot technology. The bionic robot with flexible joints is generally used in the dangerous and difficult conditions in order to perform commands with high accuracy [7]. Mechanical animals have become the important content in the research of robot and bionics. Therefore, we will imitate reconstruction of some biological characteristics and function to greatly develop the human ability of making use of natural resources [8, 9]. It will bring huge profits to society.
Despite science and technology advances which have been developed to enable man to be safe, the earthquake that happened in Japan made us realize that the disasters still frequently happen all over the world [10]. The urgent task of rescue team is to help the trapped survivors as soon as possible in earthquake, fire, mine accident, vehicle crash, and so on [11]. Actual experience shows that the survival probability is extremely low after 48 hours [12]. Therefore, how to quickly and efficiently search the survivors becomes the extremely urgent problem.
At present, search dog is the most useful tool for smell searching in disasters, but there are many unavoidable problems. Generally speaking, according to the research material of the experienced Russian search dog training team, a qualified search dog is trained for 1.5 years at least [13], while its effective working time is less than 3 years. The quadruped search and rescue robot with vision navigation system can solve this problem. According to the motion characteristics of quadruped robot, the control strategy is designed.
The motion model of the quadruped search-rescue robot is multivariable, nonlinear, and redundant. Katonah proposed robot dynamic equations based on linkage acceleration dynamic equation. T. Zafestas and J. Furusho used potential energy and kinetic energy formulas to directly calculate Lagrange equation in the matrix and vector [14, 15]. In this sense, these equations describe the dynamics of the robot [16–18], and they are equivalent. They are to establish the equation for different tasks, and the model structure is different [19–22]. Based on the quadruped bionic motion model, the autonomous search and rescue robot is used to carry out the specific search work in this paper. It can take the place of the traditional search and rescue team in disaster site. A nonfragile controller with covariance constraint is designed for stable motion of quadruped search-rescue robot. The cost upper bound of robust nonfragile controller can be guaranteed solving a linear matrix inequality.
2. Kinematics Analysis of Quadruped Search and Rescue Robot
In this paper, the quadruped search and rescue robot is a four-foot walking mechanism, which has 16 DOF. In order to determine the relative movement among the robot connecting rod, the coordinate system is shown in Figure 1. Forelegs are rescue arms and it can be used to excavate survivors. Rear legs have the support affects. If the orderly change of forelegs and rear legs is under control, the center of mass is moving with a constant velocity (see Table 1).
Legs D-H parameter table.


The coordinate system of robot with each of the rod member.
We study relations between the displacement, velocity, and acceleration with kinematics model of single leg link. Establishment of leg kinematics equations for search and rescue robot is essentially using the homogeneous transformation matrix in two adjacent link coordinate systems. When these matrices are multiplied in turn, the transformation matrix of robot leg can be getten. Link coordinate system transformation can be seen as {i} through the following four subtransformations:

The total transformation matrix between robot swing leg and foot end is expressed by the following equations:
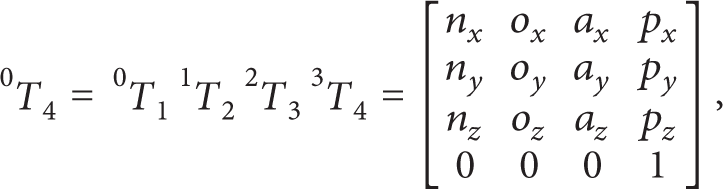
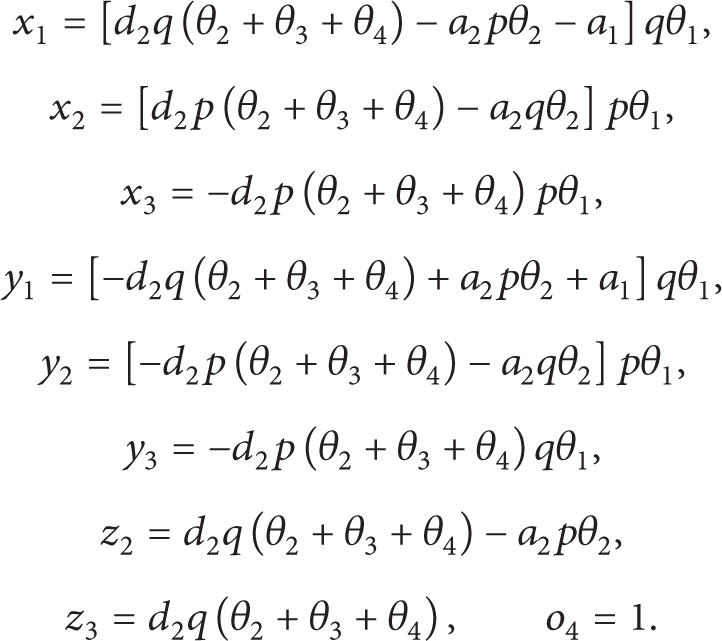
where,

The velocity of search-rescue robot is the uniform speed, which is directly related to the stability of walking. So, that we know the position parameters of the robot is insufficient. Each joint of robot angular velocity should be planned by the Jacobian matrix. The Jacobian matrix can be regarded as the transmission ratio from the joint space to the operating space velocity:

where
Based on the kinematics model, the analysis of Jacobian matrix can get small changes of the position and posture to robot; namely, it is the gait stability adjustment. The STEP function is a threepolynomial approximation Hervey Desai function. According to quadruped walking in joint angle changes using the STEP function, we can achieve all the joints in each time period of the relative rotation angle.
Leg1 hip rotation control function:
STEP (time, 3, 0, 4, 30 d) − STEP (time, 5, 0, 6, 30 d) + STEP (time, 9, 0, 10, 30 d),
Leg1 knee joint rotation control function:
STEP (time, 1, 0, 2, 20 d) − STEP (time, 3, 0, 4, 20 d) + STEP (time, 7, 0, 8, 20 d) − STEP (time, 9, 0, 10, 20 d),
Leg2 hip rotation control function:
− STEP (time, 3, 0, 4, 30 d) + STEP (time, 5, 0, 6, 30 d) − STEP (time, 9, 0, 10, 30 d),
Leg2 knee joint rotation control function:
− STEP (time, 1, 0, 2, 20 d) + STEP (time, 3, 0, 4, 20 d) − STEP (time, 7, 0, 8, 20 d) + STEP (time, 9, 0, 10, 20 d), and so on.
Figure 2 is the movement simulation experiment of trot gait. The left foreleg and the right rear leg are a group; the right foreleg and left rear leg are a group. The step function A for the two groups, respectively, is the drive between the fore swing leg and hip joint. The step function B is the drive between left foreleg and the left fore swing leg. Due to the fact that terrain sliding resistance is negligible, the gait cannot fall down. So there is no corresponding driving function design. At the same time, the same group of right rear leg motor drive function is also needed. In ADMAS, the correctness of the search and rescue robot kinematics simulation is verified. The angular velocity of all the connecting rod in four legs can be made a motion state matrix. So, the input variable of robot control system is obtained.

The angular velocity change curve of swing leg and the support leg.
3. Nonfragile Control with Covariance Constraint of Search and Rescue Robot
Motion model of quadruped search and rescue robot is got, and it is the basis for control system design and copes with the motion response. Motion control of quadruped search and rescue robot is uncertain discrete singular system.
The gait state for quadruped search and rescue robot is considered by the following equation:

where, x(k) ∈ R n is state variable, u(k) ∈ R m is control input variable, w(k) is mean value, w > 0 is white noise. A, B and D are proper dimension of known matrix. E is known real constant matrix with the proper dimension.
The state feedback control law of system (6) is the following form:

The formula (7) is taken into formula (6):

where A Δc = AΔ + BΔK.
The covariance matrix and the steady state covariance matrix of system are, respectively:

Lemma 1. If there is a positive definite symmetric matrix P, the formula is established. Then the steady state covariance matrix of the closed-loop control system (8) satisfies X ≤ P,

Because DWD T ≥ 0, formula (10) is described by

So system (8) is regular, causal, and stable. Because det(zE − A Δc ) = det(zE T − A Δc T ), det(zE − A Δc ) = 0, and det(zE T − A Δc T ) = 0 are the same solution. So formula (10) can be written as

Let ∑ k = E[x(k)x T (k)], then ∑k + 1 = E[x(k + 1)x T (k + 1)], and

Formula (12) subtracts formula (13), and the equation is expressed by the following formula:

The above formula is equivalent to the following formula:
Because A Δc is asymptotic stability, there is P − Σ > 0, so P ≥ Σ. Lemma 1 is proved.
Our work is to design robust nonfragile controller with variance constraints, which make the closed-loop system (6) regular. The causal is stable and it meets the state variance constraints.
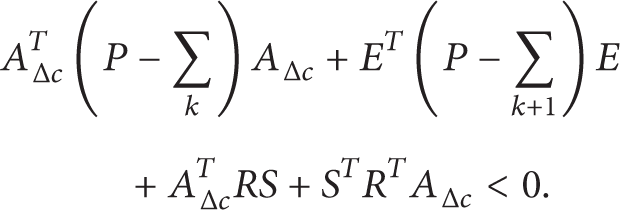
Theorem 2. If there are real number ε > 0 and β > 0, positive definite symmetric matrix P, matrix Y, and the appropriate dimension control matrices L and S meet the following inequality;

There is a variance control law in uncertain discrete singular systems. It is u(k) = Kx(k)LY−1x(k), and the control law makes the variance of system (6) to meet X ≤ P.
According to Lemma 1, system (8) is regular and stabile and it meets the variance constraint:

The above formula can be written as follows:

Let θ → 0+, and

Because det(zE − A Δc + E) = det(zE T − A Δc T + E T ), det(zE − A Δc + E) = 0 and det(zE T − A Δc T + E T ) = 0 are the same solution, the matrix (19) is regular to (E,A Δc − E). The formula (19) can be written as follows:

The uncertainty of the system is taken into formula (20):

where A c = A + BK,

The following formula can be established by Schur complement theorem:

Let L = KY, so Theorem 2 is proved.
Theorem 3. If there are real number ε > 0, β > 0 and η > 0, positive definite symmetric matrix P, matrix Y, and the appropriate dimension control matrices L and S meet the following inequality:
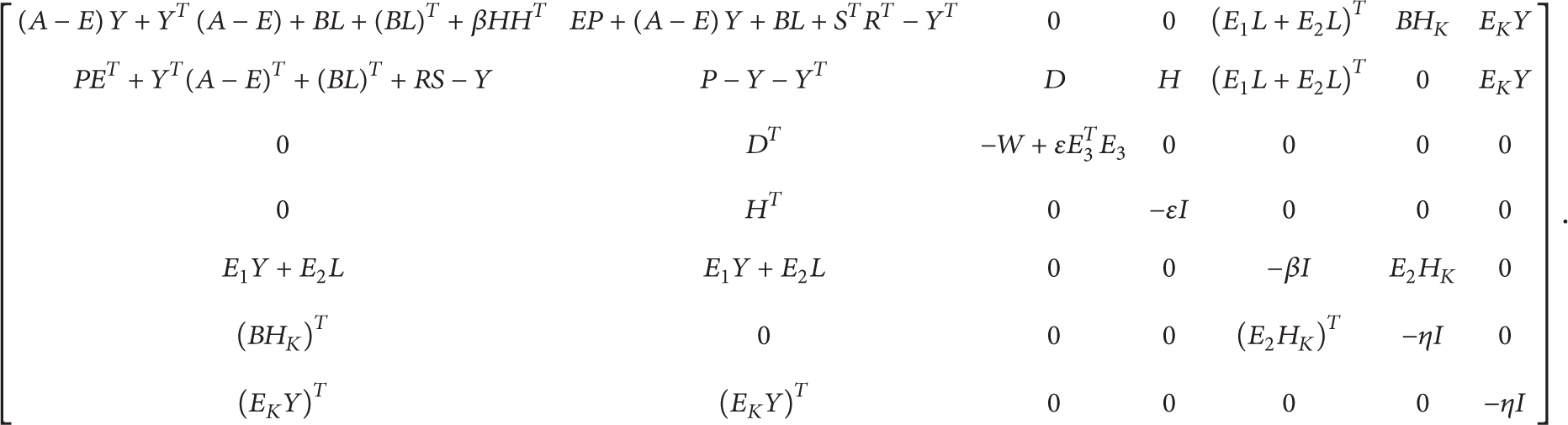
The uncertain discrete singular systems have a nonfragile controller with variance constraints. The state feedback gains K = LP−1, and it makes state variance of the closed-loop system (1) X ≤ P. Considering that formula (24) is uncertainty of the control law, we have

The following formula is got with the lemma of singular systems:
The above formula can be written as follows:

Take the uncertainty of controller to formula (27):

The above formula can be written as follows:

The following formula can be established by Schur's theorem:

L = KP is taken into formula (30), and Theorem 3 is established.
4. Numerical Examples
System (6) parameters are obtained by motion simulation of search and rescue robot, and the system parameters are as follows:

Based on the nonfragile controller with covariance constraint, there is

The corresponding state uncertainty of reliable controller is

The initial state of the system with the nonfragile controller is
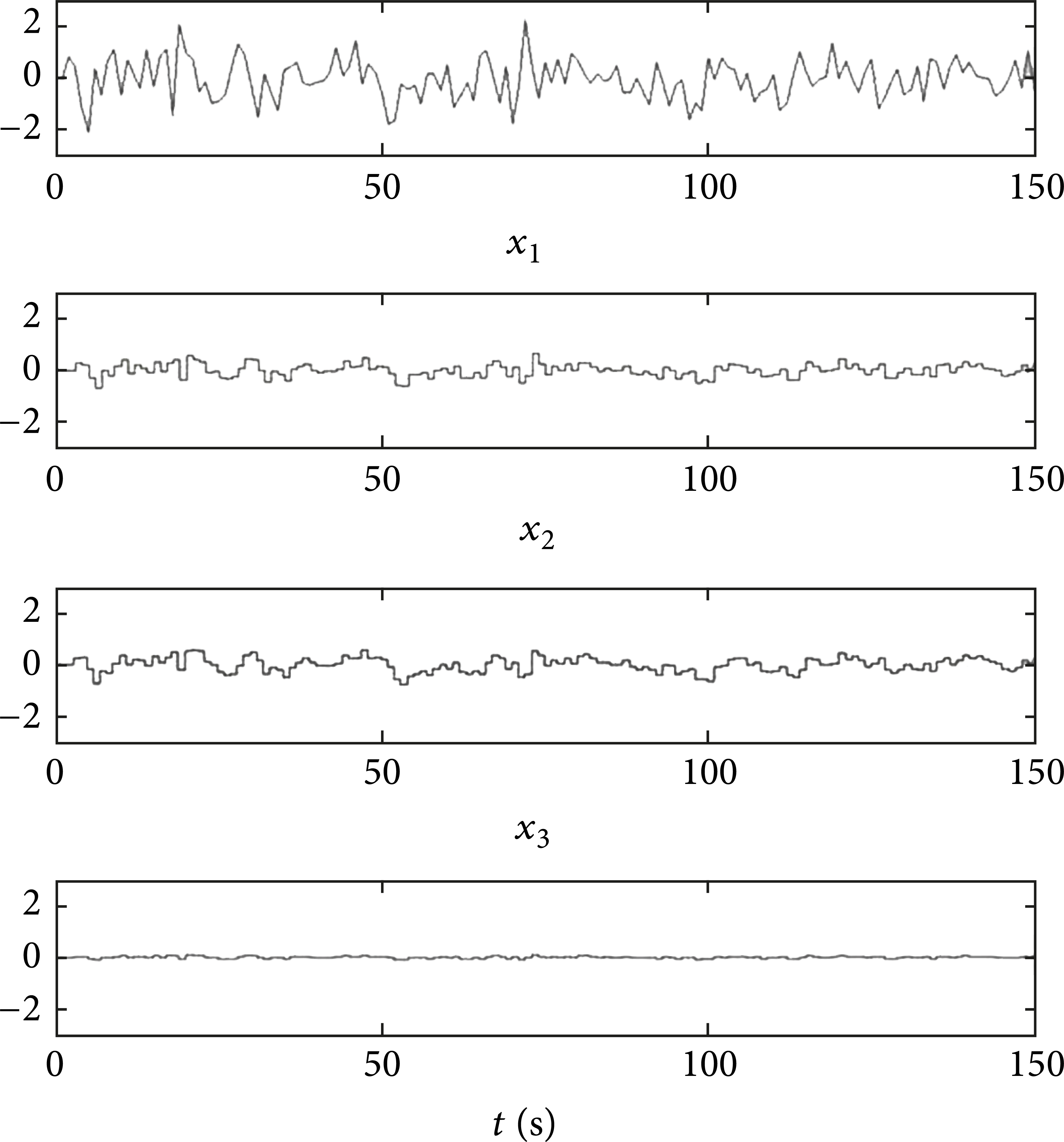
State response curve under the white noise.
State variance of system is E(x1(k)) ≤ 2.5612, E(x1(k)) ≤ 2.8633, and E(x1(k)) ≤ 1.5272. The poles of the closed-loop system is z1 = 0.2000, this system is stable. Figure 4 is its stable motion control photo.

Stable control photo of robot.
5. Conclusions
The gait stability of autonomous quadruped search and rescue robot is researched. Because it is uncertain discrete singular systems with variance constraints, we proposed the method of robust control on the basis of kinematics analysis and Jacobian matrix. A state feedback nonfragile controller is designed. The method is given in terms of linear matrix inequalities with LMI technology. The controller is obtained with linear matrix inequalities solution and the state of the system met the expected variance constraint. Finally, the embedded control system for quadruped search and rescue robot is designed. After some parameter and program debugging, quadruped robot is controlled effectively. The results of the numerical simulation and robot control test show a good anticipated control performance.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This work was supported by the National Natural Science Foundation of China (Grant no. 51105122) and supported by Scientific Research Fund of Heilongjiang Provincial Education Department (no. 12521097).