
Abstract
The aim of this paper is to integrate the artificial immune systems and adaptive fuzzy control for the automobile suspension system, which is regarded as a multiobjective optimization problem. Moreover, the fuzzy control rules and membership controls are then introduced for identification and memorization. It leads fast convergence in the search process. Afterwards, by using the diversity of the antibody group, trapping into local optimum can be avoided, and the system possesses a global search capacity and a faster local search for finding a global optimal solution. Experimental results show that the artificial immune system with the recognition and memory functions allows the system to rapidly converge and search for the global optimal approximate solutions.
1. Introduction
Optimization algorithms are widely used in various fields such as control systems, image recognition, path planning, and economic efficiency, and it is evident that traces of optimization applications can be found in these fields. Apparently, the development of optimization applications has grown rapidly in recent years, and related research is being proposed ceaselessly. Moreover, optimization algorithms are widely employed in the industry as well. Optimization algorithms play a significant role in this field.
There are various well-known artificial intelligence algorithms such as genetic algorithms (GA), particle swarm optimization (PSO) [1, 2], and subsequently immune algorithm (IA). Particle swarm optimization (PSO), which was proposed by Kenney and Eberhart in 1995 [3, 4], is a swarm intelligence optimization technique. The main advantages of PSO are fast convergence and few user-defined parameters. Even though the number of user-defined parameters is lower than other evolutionary computing technologies, PSO still possesses good performance. Hence, PSO is widely utilized to solve major optimization problems. Kumar et al. [5] proposed that, by using a unified power quality conditioner (UPQC), minimum power can alleviate the unbalanced voltage dips and phase jumps. In order to obtain minimum power, PSO is used to search the solution of objective function derived for minimizing power injection of UPQC.
Besides, Xin et al. [6] explored various DE-PSO hybrid algorithms and proposed a classification mechanism to distinguish and analyze these hybrid algorithms to solve an optimization problem. Li et al. [7] proposed a modified Broyden-Fletcher-Goldfarb-Shanno (BFGS) method to improve the local search capability of PSO. The enhanced PSO method is capable of finding local and global optimum for the multimodal and constrained optimization problems. Ciornei and Kyriakides [8] proposed new heuristic hybrid optimization method by combining the ant colony optimization, which is called API algorithm, and real-coded genetic algorithm (RCGA) to solve nonconvex economic allocation problems on the power system. Although genetic algorithm has good convergence characteristics in the search space, it has a weak exploring ability. Therefore, API is used to solve the issue. There is also the study proposed by Lee et al. [9], in which the intelligent memetic algorithm is applied to optimize the design of the permanent magnet synchronous motor. It combined GA with guided mesh adaptive direct search (GMADS) to reduce the computation time caused by the finite-element analysis (FEA). In addition, it is guaranteed that the system converges to the global optimal solution. Ketabi and Navardi [10] used GA and finite-element method to optimize torque value and torque ripple for a crystalline silicon variable-capacitance micromotor.
Polat and Güneş [11] used artificial immune recognition system for fuzzy weighted pretreatment. Fuzzy weighted preprocessing and feature selection are applied to diagnose hepatitis disease and evaluate the most accurate learning methods. Experiments were conducted on the hepatitis disease dataset to diagnose cardiac arrhythmias in a fully automatic manner by using an artificial immune recognition system, fuzzy weighted preprocessing, and feature selection. Ren et al. [12] built the electrohydraulic servo pressure control simulation model based on the hydraulic bending control system. The proposed fuzzy immune PID controller is constructed by connecting the P-type immune feedback controller to a conventional PID controller in series and in parallel. The controller parameters can be adjusted on-line by the rules of immune feedback controller and fuzzy controller.
The algorithms mentioned above are widely used, but they still suffer from some shortcomings. For example, particle swarm algorithm has the characteristics of rapid convergence, yet it gets easily trapped into a local optimum. Moreover, due to encoding problems, genetic algorithms can only find near-optimal solutions, and it causes the need for repeated calculations, increases the execution time, and lowers the efficiency.
Artificial immune algorithm simulates the protective measures of vertebrates, which protects the body from foreign pathogens, and it is similar to the robust system of engineering applications. Therefore, this paper proposes a new hybrid optimization method “fuzzy immune genetic algorithm,” which uses integer encoding to adjust the fuzzy membership functions and fuzzy rules for controlling decision-making in a chromosome-like way. Not only can it shorten the decoding time, but also enhance the performance of the fuzzy robust controller. In order to verify the performance of proposed method, fuzzy immune genetic algorithm is applied to solve a multiobjective optimization problem, which is defined to design the controller of the automobile suspension system in relation to the driving comfort and handling. The algorithm is used to learn the fuzzy rules and membership functions of the controller, and it contributes fast convergence. Furthermore, with the benefits of the diversity of the antibody group, it can be avoided that the system gets trapped into the local optima solution, so the system is enabled to obtain a global search capacity and faster local search property.
2. Fuzzy Immune Genetic Algorithm
The immune system is a self-protection system of vertebrates. It identifies invading antilogous substances and uses antibody memory and antigenic function to come to the body's defense. From the point of view of engineering, optimization can be regarded as the invasion antigens of the artificial immune system (AIS). The feasible solutions of an optimization problem can be seen as the antibody of the AIS. Furthermore, the process of searching the feasible solutions in the solution space can be considered as lymphatic tissue producing antibodies to eliminate antigens. When searching for the optimal solution, the system will memorize the current best solution and make the antibodies gradually approach the optimal solution according to the present state optimal solution.
Therefore, as shown in Figure 1, the proposed system is comprised of the following subsystems: recognition, memory, antibody production, and antibodies inhibited system. The recognition mechanism is mainly used to identify the consistent and affinity level between two antibodies or an antibody and an antigen. If the affinity level between antibodies is high, then the similarity between antibodies is high, and the chromosomes will be memorized. However, if the gene concentration is higher than the threshold, regional optimization of the system needs to be inhibited. Memory mechanism is used to memorize the antibodies with lower concentrations, which indicates the areas that have rarely been searched by these antibodies in the immune mechanism. Hence, this kind of antibody is regarded as important antibody.
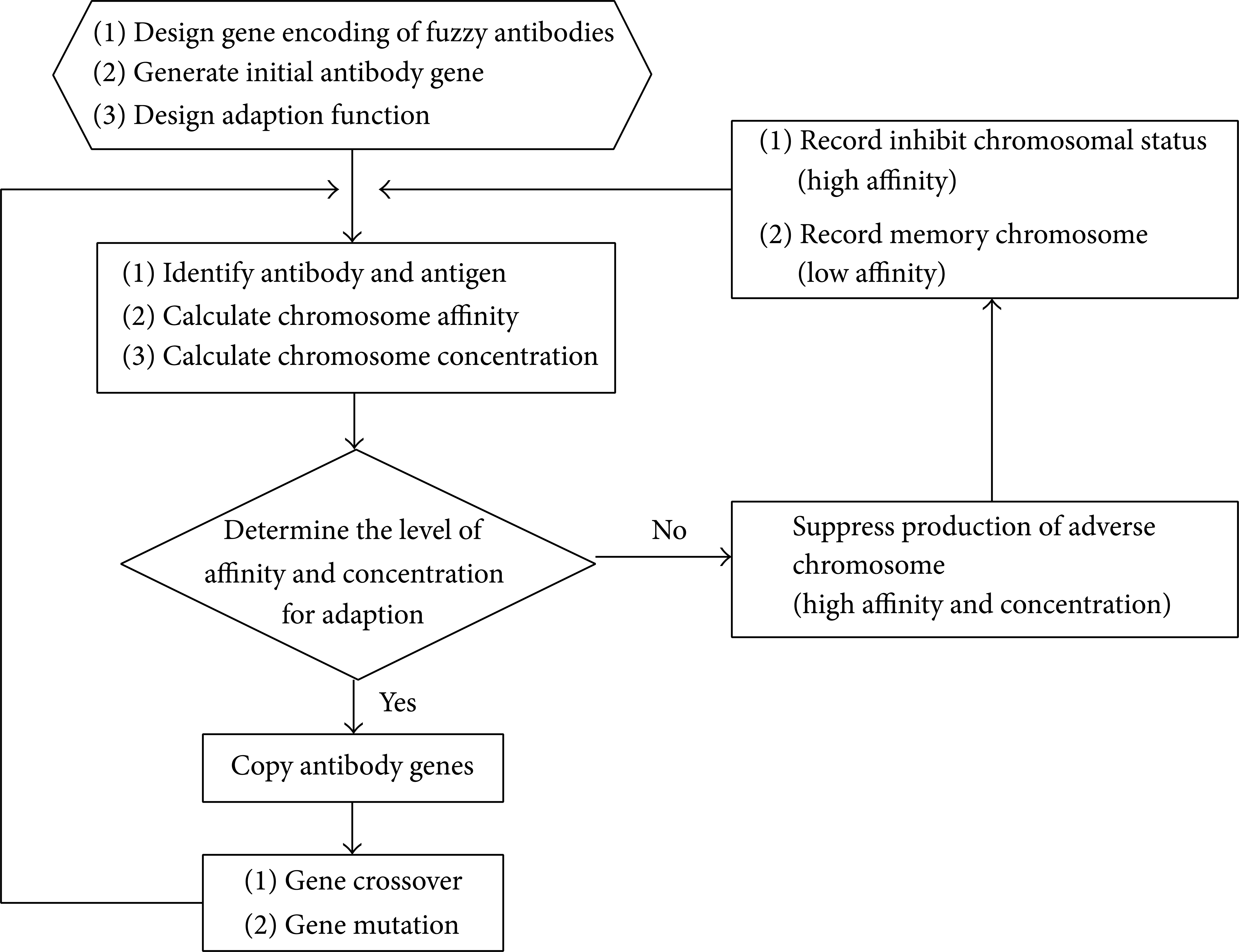
Flow chart of fuzzy immune genetic algorithm.
When the memory gene pool is not saturated, the nonmemorized antibody will be saved into the pool directly. In contrast, if the memory gene pool is saturated, the antibody will be substituted by the chromosome that has lower affinity levelswith the antigen and the antibody memory gene pool is seen as a template, producing a new antibody that has a high affinity level with the template. The memory mechanism aims to achieve an in-depth exploration in the local area by copying important antibodies. The operation of the inhibition mechanism is that when the inhibited gene pool is not saturated, antibodies will be stored directly to the inhibited gene pool; otherwise, the antibody will be substituted by the chromosome that has higher affinity level with the antigen, and the antibody inhibited gene pool will be seen as a template, eliminating the antibodies that have a high affinity level with the template. The inhibition mechanism aims to substitute a new antibody for the oversearched antibody. Hence, the oversearched problem can be eliminated, and a wide search capability can be achieved.
Therefore, by employing the immune system's recognition and memory characteristics, the fuzzy immune genetic algorithm can converge faster. Furthermore, by using the diversity of the antibody populations, local optimum traps can be avoided, and the system is enabled to converge rapidly and find the global optimum.
In order to integrate immune function into the fuzzy control system and search for the best fuzzy control strategy, the main process of the fuzzy immune genetic algorithm can be divided into the following steps.
Step 1: Generate Initial Population Randomly. In this study, membership functions and if-then rules of the fuzzy logic controller are adjusted by the immune system, so the length of the chromosome depends on the number of fuzzy rules and the definition of membership functions. The linguistic variables of the fuzzy logic controller with 2 input variables are defined as {NL, NM, NS, ZE, PS, PM, PL}. Hence, the number of fuzzy rules is 49. Moreover, the starting point, the end point, and the shape of membership function are also adjusted by the immune system. Therefore, each chromosome consists of 70 genes, and the chromosome encoding structure of the antibody is shown as follows:

The first 21 genes define the membership functions, and each 3-gene segment represents the starting point, the end point, and the shape of a membership function. For example, S1, S2, and S3 represent the starting point, the end point, and the shape of the first membership function, respectively. On the other hand, the latter part of the chromosome represents the fuzzy rule. The population size of the antibody chromosome is 20, and the initial population of the antibody chromosome is generated randomly.
Step 2: Computation of the Affinity Level and the Fitness Function Value. Affinity level is used to identify the similarity between two antibodies or an antibody and an antigen. Hence, there are two kinds of calculations: one is used for the former, and the other is used for the latter. Each set of antibodies should be compared with its relative gene. If the record is similar, the note is 1; otherwise, it is 0. Then the information entropy is calculated as follows:

where P i,j is the possibility of the jth gene in the Nt h antibody. If all the jth genes in the populations are the same, then A j (N) equals 0. Average entropy is given as follows:

The chromosome affinity level of all antibodies is defined as follows:

where y v is the chromosome antibodies and w is the affinity level of the chromosomes of the antibodies. The fitness function value F v is designed to calculate the output error of the system. The fuzzy immune genetic system is used to minimize the output error. Hence, during the evolution process the chromosome is decoded to the controller, and the corresponding fitness value is calculated. The equation of the affinity level between the antigen and antibody is shown as follows:

where xν is the chromosome antigen.
The multiobjective optimization problem of the automobile suspension system, which is associated with driving comfort and handling, is defined as follows:

where f(E) is the fitness function and E = [e1,e2,…,e pop ] is the error of the control system. Since the active suspension control is implemented by using the fuzzy controller, the optimal fuzzy rule design problem is solved by using the immune genetic method.
Step 3: Calculate the Concentration Level of the Memory and Inhibition System. When the affinity level is larger than δ1, it is regarded as the same category as that of a c = 1. Subsequently, in the antibody gene pool, C v represents the ratio of those belonging to the same category as antibody v chromosomes. The formula is presented in

When the affinity value C v of a certain antibody chromosome is greater than the threshold value δ, it will be assigned to the inhibition system. In contrast, when C v is less than δ, it will be assigned to the memory system. The antibodies in the inhibition area possess higher concentration levels, and it represents that the area has been intensively scanned by the immune mechanism. Hence, those antibodies are regarded as unimportant antibodies and will be suppressed. It is noted that, in general, the threshold δ is selected by the values within between 0.5 and 0.9. A bigger threshold results in similar generations between parents and filial. In the mentioned topic, it aims to raise the variation between two generations by using a threshold of 0.5. It makes only fifty percent of the chromosomes in the parent generation be reproduced in the filial generation.
Step 4: Replicate and Suppress Antibody Number. While we choose the thresholds as δ1 = 0.5 and δ = 0.55, if the affinity value of a certain chromosome is larger than δ1, the chromosome can be reproduced because the system has been within local optimum. The former consists of 5 groups of antibody chromosomes, and the latter consists of 14 groups of antibody chromosomes. They can be preserved to the next evolution process. Moreover, there is still another group used to store the antibody chromosomes with optimal fitness, which needs to be preserved in each generation.
The replication rate of each generation is shown as follows:

in which a represents affinity, axν is the affinity between an antibody and a chromosome, a yv,j means the affinity between two chromosomes, s is the number of memory chromosomes, and j denotes the jth memory chromosome. Finally, the antibodies are selected according to the roulette wheel selection method for duplication.
Step 5: Selection Process. Progeny selection method is a mechanism that uses memory and inhibited cell for replication or inhibition and performs crossover and mutation afterwards. Crossover and mutation also take fuzzy theoretical operations to decide crossover and mutation methods.
Step 6: Terminal Condition. If the maximum generation limit is reached, then the process stops and the best parameter set of the fuzzy controller is obtained; otherwise, go back to step 2.
Fuzzy Immune Gene Encoding. In this paper, integer encoding is chosen for the evolutionary process. In order to design the fuzzy controller, the integer form is used to encode the chromosome, which consists of the information of the fuzzy linguistic variables and fuzzy membership functions. Fuzzy linguistic variables include NL, NM, NS, ZE, PS, PM, and PL, and each variable is encoded as integer 1 to integer 7, respectively [13–15].
Similarly, the shape of the membership functions is searched by the immune system. There are 7 types of membership functions. Thus, the gene segment associated with the membership functions is encoded as the integer whose range is from 0 to 6, and the corresponding shape of membership function is invalid morphology, triangle, left triangle, right triangle, Gaussian, S-shape, and inverse S-shape, respectively. The membership function of invalid form is used to prevent an invalid linguistic term and to reduce unnecessary calculations and fuzzy rules. In addition, in order to automatically evolve the center point and width of fuzzy membership function, xi1 represents lower limit of the membership function and xi2 is the upper limit of the membership function. The genes segments are encoded as the integer whose range is from −10 to 10. The center point c i (i = 0~6) is defined as follows:

After learning fuzzy rules and fuzzy membership functions, the best chromosome is utilized to describe the required parameters related to the fuzzy controller. At the initial stage, 20 sets of chromosomes are randomly generated. Each chromosome has its own fuzzy membership functions and fuzzy rules. Each generation needs to evolve 20 groups of population as shown in Figure 2. The artificial immune evolution is adopted to determine the number of replication antibodies or inhibited ones.

Encoding of fuzzy immune gene pool and the structure diagram of operation.
3. The Optimal Control Problem
In recent years, various car manufacturers require the chassis performance to provide driving comfort and handling stability. To achieve this goal, it is controlled using Automotive Active Suspension System, which gradually becomes an important technology to improve vehicle road handling and ride quality. However, the suspension system usually has nonlinear and uncertain dynamic characteristics. The main challenge is how to reduce road shock and vibration and offer comfort for passengers. However, increasing comfort will affect the handling of the car, so the trade-off between comfort and handling is an important issue to the suspension system. Therefore, the new fuzzy immune genetic algorithm is chosen to design the controller, which is considered as a multiobjective optimization problem of driving comfort and handling for motorists. In this paper, the current vehicles and intelligent controller design, which is widely used in quarter-car model suspension system [13, 15, 16], are chosen for the active suspension controllers as shown in Figure 3.

Schematic diagram of quarter-car active suspension system.
The dynamic equation of the suspension system is

The relevant parameters are defined as follows:

The relevant parameters include linear spring constant k s , tire spring constant k t , damping coefficient b s , controller output damping force f a , road disturbance input z r , sprung mass displacement z s , unsprung mass displacement z u , unsprung mass m u , and sprung mass m s . The sprung mass acceleration determines the comfort of the passengers, while the tire deflection decides the amount of friction between the tires and the ground, both of which regulate automobile handling. The comfort of the passengers and automobile handling are considered as the criteria to assess the performance of the suspension system. The mathematical model of z r is given by the following formula, (12), in which z r = S(m):

where m is the wave number (cycle/m), while the sprung mass natural frequency is w c ≈ 7.7 (rad/s). Besides, V (m/s) denotes the vehicle speed. t s = 0.01 is sampling time, and i = 1 is the iteration step. P = 3.14 × 10−6 is road quality, and C = 10 is current road disturbance coefficient. While the system implements the fuzzy control, it concurrently controls the displacement of the sprung mass displacement z s and the unsprung mass displacement z u to track the desired reference R = 0. To enhance the comfort for the passengers, it is needed to make improvements for the suspension deflection and sprung mass acceleration. When the suspension system has an upward shift, the acceleration of the spring mass is reduced, and vice versa. Driving comfort, however, will affect the handling of the car. The car has worse handling characteristics as the comfort is increased. In terms of handling, it is usually investigated by determining the degree of exposure between the tire and the ground. The fitness function f(E) is defined as follows:

where w = 100 is the weight.
Another factor is making sure that there is enough space between the spring mass and the tires, so it can prevent tires from hitting the car body. Hence, a penalty strategy is set up in the system, limiting (z s [n] − z u [n]) ≤ 5 and not allowing it to exceed 5 cm, in the occasion that it exceeds f(E). During the evolution process, if the handling error is increased and the quality of the chromosome is getting worse, chromosomes with large error will be removed. Hence, it prevents these chromosomes from being reproduced to the next generation.
4. Simulation
In this paper, fuzzy immune genetic algorithm is chosen for the evolution process. In the process, the shape, the center, and the width of the membership function and fuzzy rules of the fuzzy theory are incorporated into the immune antibody genes. The features of the artificial immune algorithm are utilized to calculate the concentration of affinity for each set of chromosomes, and they are stored in the memory and inhibition system separately. Furthermore, antibody chromosomes within the inhibited system are removed. The antibody chromosomes within the memory system are replicated according to the roulette wheel selection, and the population of the next generation is generated. Then changes during the evolution process are observed. If the chromosome concentrations in the gene pool are similar, the system probably gets trapped into a local optimum. To escape from the local optimum, the mutation rate will be increased to search for the undeveloped area. The fuzzy inference method suggested in [13, 15] is utilized to automatically adjust the system's evolution; it prevents falling into the local optimal region. Finally, the experimental results are shown in Figure 4.

Pavement response plot of the system (passive: dashed line; fuzzy immune genetic algorithm: dotted line; optimal: dash-dotted line): (a) suspension deflection, (b) sprung mass acceleration, and (c) tire-ground beating distance.
In Figure 4, the dotted line shows that the suspension deflection, the sprung mass acceleration, and the tire-ground beating distance are improved significantly. The fuzzy membership function obtained by the fuzzy immune genetic algorithm is shown in Figure 5.

Membership functions after evolution.
The success of the algorithm strategies for the evolution process is exhibited in Figure 6. Attributing to the fuzzy immune genetic algorithm, it is able to exert advantages of excellently selecting good or bad genes, and it allows the systematic evolution to show a satisfactory performance in the 20 generations. Between generation 9 and generation 10, the system falls into a local optimum, and then the mechanism, which adjusts mutation rate and crossover rate, is activated to make the system jump out of the local optimum. Thus, the system continues to find the optimal solution. Similar situation can be seen between generation 11 and generation 12 and between generation 15 and generation 16.
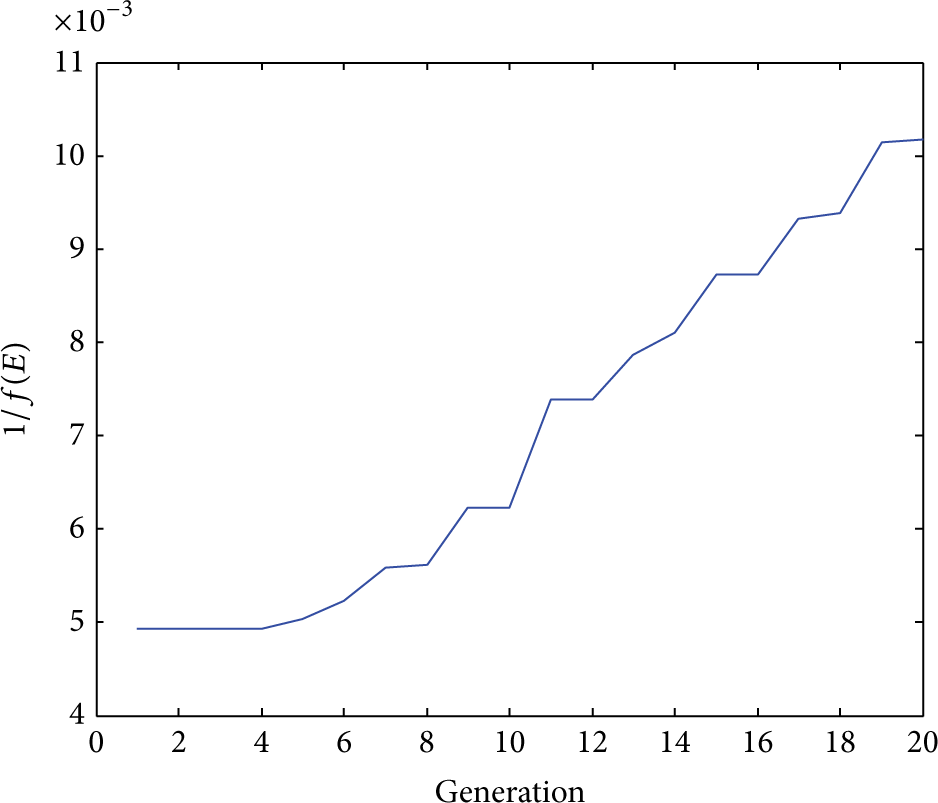
Evolution process.
Moreover, the fuzzy immune genetic algorithm is compared to other well-known algorithms including gene algorithm and evolutionary GA fuzzy and PSO reinforcement evolution. The maximum overtake measurements of the road surface response are given in Table 1.
Maximum overtake measurements of the road surface response.
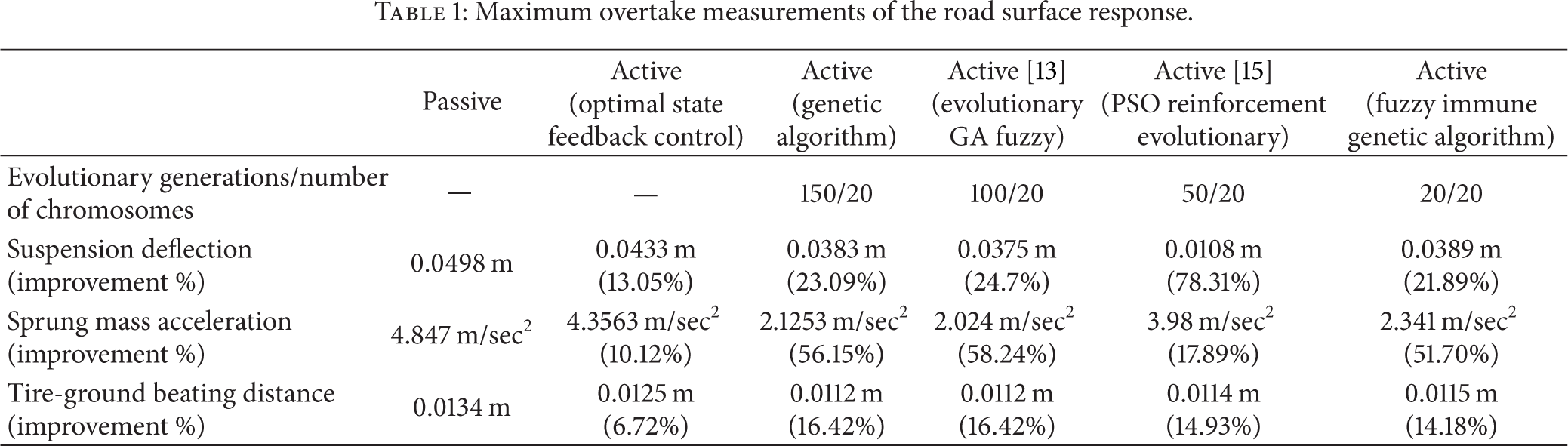
As stated in Table 1, the passive suspension system is not controlled by any controller. Also, the optimal linear feedback control scheme is another base and compared with other algorithms. According to Table 1, it can be seen that the genetic algorithm in this study has good performance. However, the number of generations for the genetic algorithm is 150, and it is much larger than the number of generations for the fuzzy immune genetic algorithm. In evolutionary GA fuzzy algorithm, SVM is incorporated to classify the genes according to the quality. Moreover, fuzzy inference method is utilized to automatically adjust the crossover rate and mutation rate, so it prevents the system from falling into the local optimum. Results show that, at the 100th generation, the system performance of evolutionary GA fuzzy algorithm has surpassed that of GA. Hence, it is shown that the gene selection mechanism and preventing the system from local optimum trap are important factors. In PSO reinforcement evolutionary algorithm, PSO is utilized in the mutation strategy and enhanced the evolution speed. Then, the path of the particle evolution is learned by Q-learning method. After 50 generations, the suspension deflection is improved significantly, and the improvement is much higher than other algorithms.
The fuzzy immune genetic algorithm is an accumulation of previous research. It is specifically designed for gene selection and preventing the system from local optimum trap. The fuzzy controller rules and membership functions are encoded into the antibody chromosome. Then, through the memory and inhibition system, the good antibody genes and bad antibody genes are selected, and crossover and mutation rates are adjusted automatically. Although this method does not augment the evolution speed, it mimics the mechanism of biosphere evolution in a random way. However, the objective of this study is to propose the method that converges fast to achieve an optimal solution. In addition, the performance of the proposed method exceeds the optimal linear feedback control, which is often regarded as a basis of comparison. The result in Figure 6 shows that, after 20 generations, the system is approaching the optimal solution. It is still possible for the system to evolve further, but this is not in the scope of this study.
5. Conclusion
In order to solve the multiobjective optimization, which is associated with comfort and handling in the active suspension system, this study proposed the fuzzy immune genetic algorithm to learn the optimal membership functions and optimal rules for the fuzzy controller. The error of the system feedback signal is utilized to design the fitness function for the evolution process. With the benefits of the memory and inhibition system, the fuzzy immune genetic algorithm possesses multioptimum characteristics search ability. Hence, the system is capable of finding the global optimum and avoiding the local optimum trap, and the system also converges fast.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This work is supported by the National Science Council, Taiwan, China, under Grants nos. NSC 102–2221-E-218-017 and NSC100-2632-E-218-001-MY3.