
Abstract
In Cognitive Radio sensor networks, a pair of Cognitive Radio (CR) users wishing to communicate should first agree on a specific channel called control channel. Communication rendezvous is used to establish a control channel between CR users. Channel Hopping (CH) protocol is a sequence-based approach that provides an effective method for implementing rendezvous without relying on a Common Control Channel (CCC). In this approach, all CR users hop to the same rendezvous channel and hence this channel will serve as a control channel between them. In this paper, we propose two Channel Hopping Sequences (CHS) to establish a link in CR sensor networks with and without the assumption of global clock synchronization. Our schemes provide successful communication rendezvous within a bounded time interval. Theoretical analysis and simulation results showed that both schemes outperform the existing schemes used for similar purpose in terms of many performance criteria.
1. Introduction
Wireless sensor networks (WSN) are being used in many industrial and application areas, including industrial process monitoring, healthcare applications, home automation, and traffic control [1]. In last decade, various communication systems use industrial, scientific, and medical (ISM) band for exchanging information due to its licence-free nature [1, 2]. As a result, the ISM band becomes more congested. The concept of Cognitive Radio (CR) has recently initiated great interest to get full potential of the radio spectrum [3]. If a Primary User (PU) is currently not using the band, the secondary user changes its transmission parameters to take advantage of the band. After detecting the vacant frequency bands, a CR user selects the best available spectrum hole for opportunistic communications and it vacates the channel when the PUs returns. It also applies the same phenomenon to a control channel. Hence, a particular channel cannot be fixed as a control channel forever and the control channel can vary from time to time. CR networks involve extensive exchange of control messages to coordinate critical network functions, which are broadcasted on a preassigned Common Control Channel [4]. However, not only is a static control channel allocation contrary to the opportunistic access paradigm, but also the implementation of a CCC for all the CR users is a challenging task [4]. Furthermore, the sudden appearance of a PU may lead to loss of connectivity among SUs [4, 5].
Communication rendezvous enables CR users to communicate with each other. A pair of CR users wishing to communicate should first agree on a specific channel called control channel. Communication rendezvous are used to establish a control channel between CR users. Most of the existing MAC protocols for CR networks relay on a dedicated global or local control channel [7–10]. However, those approaches suffer from the problem of control packet overhead, and the dynamic nature of spectrum availability makes it difficult to rely on a CCC. In contrast, Channel Hopping (CH) protocol is a sequence-based control channel design that provides an effective method for implementing rendezvous without relying on a CCC [7]. One of the rendezvous channels are assigned to be a control channel. The CH sequence determines the order with which the CR users visit all of the available rendezvous channels. The main aim of this design is to diversify the control channel allocation over spectrum and time spaces in order to minimize the impact of PU activity. In this approach, all CR users hop on a set of sequences of rendezvous channels. When two CR users want to communicate with each other, they hop to the same rendezvous channel and hence this channel will serve as a control channel between them.
In this paper, we propose two Channel Hopping Sequences to establish a link in CR sensor networks with and without the assumption of global clock synchronization. Under the assumption of global clock synchronization, we first propose Synchronous Channel Hopping Sequence (S-CHS) in which the sequences can overlap with each other in all available channels at different time slots and the rendezvous spread out over. Next, under the assumption that CR users are not synchronized with each other, we propose Asynchronous Channel Hopping Sequence (A-CHS) in which CR users can get a rendezvous channel within a bounded time although they start hopping at any time slot.
The rest of this paper is organized as follows. We describe related works in Section 2. The S-CHS and the A-CHS protocols are explained in Section 3. Performance evaluation of the proposed schemes is given in Section 4. Finally, we conclude the paper in Section 5.
2. Related Works
2.1. Quorum-Based Channel Hopping (QCH)
The quorum-based mechanism [6] achieves CCC establishment through CHS satisfying the property of intersection (Figure 1). Based on this property, four CH systems are constructed. The first system (M-QCH) minimizes the upper-bound of the Time to Rendezvous (TTR) value by using the majority and minimal cyclic quorum systems. The second system (L-QCH) evenly distributes the rendezvous points over different time slots during a CH period. The third system (A-QCH) guarantees rendezvous only on two distinct channels between any two CHS's without requirement for global clock synchronization. The fourth system, A-MOCH mechanism, presumes that the rotation closure property of quorum-based system must be satisfied by one commonly available channel. The advantage of such assumption can enable one rendezvous in

Quorum-based CH system [6].
2.2. Sequence-Based Rendezvous (SeqR)
The SeqR mechanism [11] constructs nonorthogonal CHS using permutation of the channels as presented in Figure 2. The selected permutation appears


Building a sequence for SeqR [7].
Note that the original permutation appears 6 times in the sequence, including once mixed with the other 5 appearances of the permutation. This sequence is then repeated infinitely. The expected TTR is bounded by
2.3. Efficient Channel Hopping (ETCH)
ETCH (SYNC-ETCH) and Asynchronous ETCH (ASYNC-ETCH) mechanisms are presented in [12]. The SYNC-ETCH consists of three parts: rendezvous scheduling, rendezvous channel assignment, and CHS execution. A newly joining node executes SYNC-ETCH to establish a control channel with another node as follows. First, the node constructs a set of CHS guaranteeing the satisfaction of the overlap requirement. After completing the CHS construction, the node synchronizes to the existing nodes and starts the CH process according to the CHS execution scheme of SYNC-ETCH. Particularly, PU activities are high on SYNC-ETCH because each node randomly selects a sequence after completing a pre-started sequence (the sequence to be selected might be suffering from PU appearance). Similar to SYNC-ETCH, ASYNC-ETCH also first constructs a set of CHS when a CR node joins the network. The difference is that the node does not need to synchronize to the existing nodes unlike ASYNC-ETCH.
3. Proposed Schemes
In this section, we propose two Channel Hopping Algorithms that generate CHS to establish a link in CR sensor network with and without the assumption of global clock synchronization: Synchronous Channel Hopping Sequence (S-CHS) and Asynchronous Channel Hopping Sequence (A-CHS). In both algorithms, it is assumed that CR users have N available channels, and they are capable of sensing PUs signal. The PUs can establish connection on
3.1. S-CHS
S-CHS is based on the assumption of global clock synchronization. The algorithm to generate S-CHS is divided into three parts: construction of Cayley table, reflection, and cyclic shift and catenation.
3.1.1. Construction of Cayley Table to Get All Possible Permutations
We use Cayley table [13] for designing the hopping sequences because it simplifies the permutation operation on a given set. The Cayley table produces all possible permutations of a set. The permutation of a set can be obtained by integer addition modulo operation which is a mathematical tool that helps in getting numbers which are less than the pivoting number (the divisor). The Cayley table, denoted by C, over the set

An example for a set

Cayley table for a set
3.1.2. Reflection of Cayley Table
We construct the reflected Cayley table by appending all elements except the last element to the end of each row of a given Cayley table in the reverse order. For the ith row of the Cayley table
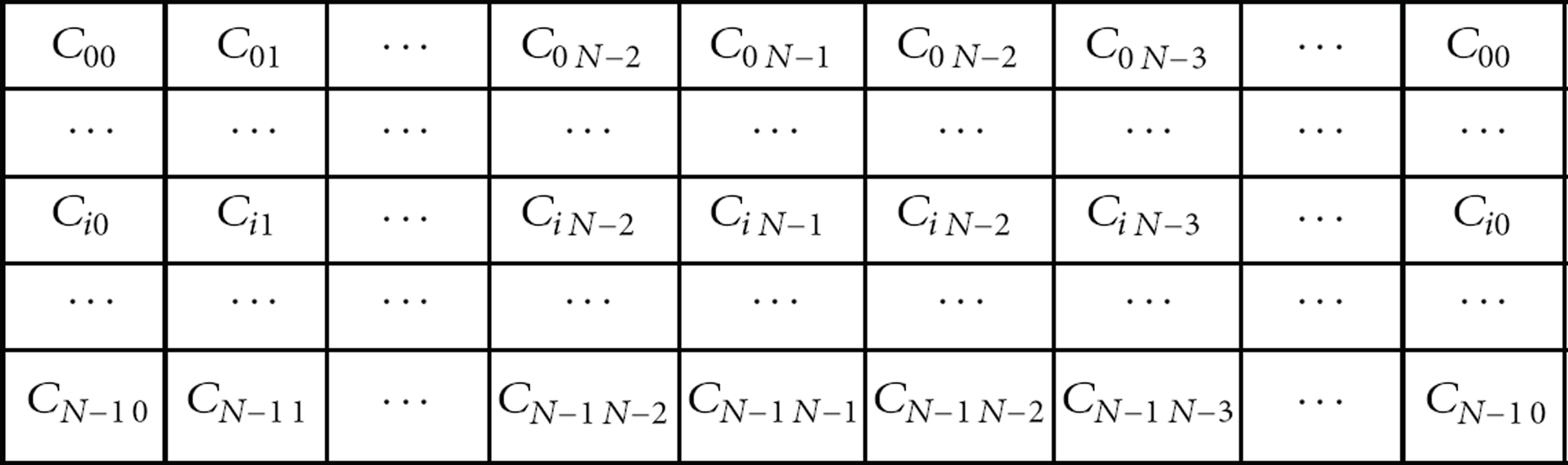
Illustration of reflected Cayley table.
3.1.3. Construction of S-CHS by Cyclic Shifting and Catenation
We define the k-order cyclic shift (or rotation) operation by shifting a vector to the right direction by k positions in a cyclic manner. If we perform one-order cyclic shifting on an N-code array

Cyclic shifting of reflected Cayley table for a set
Finally, we make hopping sequences by catenating all elements from the first to the last row of the reflected Cayley table. For example, for a set


Illustration of S-CHS for CR sensor network with 3 channels.
It is interesting that the coincidence happens in a cyclic manner. This is because cyclic shifting operation is performed on the reflected Cayley table to make hopping sequences. The length of S-CHS is
With S-CHS, any given two hopping sequences can coincide periodically. Figure 7 shows periodical rendezvous points and the mean TTR when two sequences
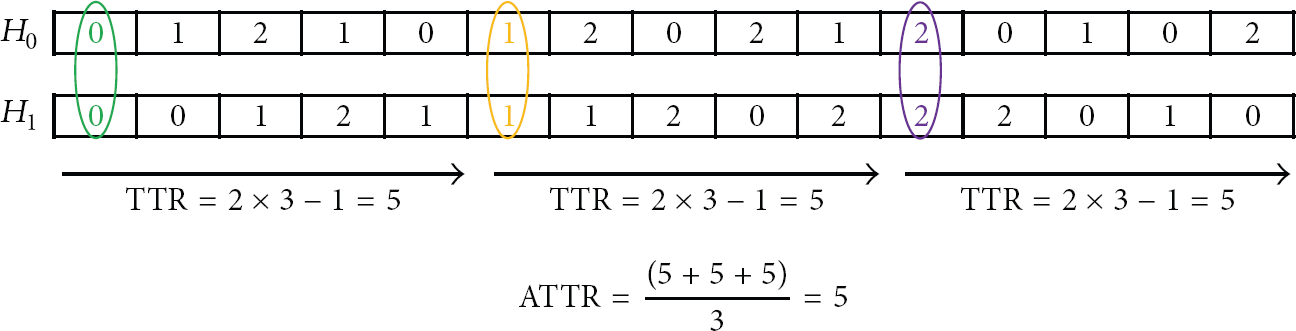
Average TTR using S-CHS for CR sensor network with 3 channels.
3.2. A-CHS
When CR users are not synchronized with each other, the assumption for S-CHS is no longer valid. Although CR users start hopping at any time slot, they should get a rendezvous channel within a bounded TTR. In the preceding section, we used reflection properties together with Cayley table and cyclic rotations in order to establish a set of hopping sequences. In S-CHS, reflection operation is performed about the last element. Instead, in A-CHS, reflection is performed about certain imaginary point (channel) which is not member of currently available channels. The easiest way for generating such a point is to have duration (time slot) during which no channel access or no frequency hopping is present. Let us denote such silent duration by B (meaning “blank”). To generate A-CHS, this silent channel is appended at the end of the channel members for reflection. Then, A-CHS is constructed by reflecting all channel members about the silent duration (denoted by

Construction of A-CHS by addition of silent duration and reflection about silent duration.
For instance, in a CR sensor network with three channels, we get a hopping sequence

Rendezvous demonstration with A-CHS.
Figure 10 demonstrates when and where two CR users rendezvous with A-CHS in 3-channel CR sensor network. In this figure, two values in each entry mean rendezvous channel and rendezvous time, respectively. For example, two sequences

Demonstration of rendezvous with A-CHS in 3-channel CR sensor network. (Two values in each entry mean rendezvous channel and rendezvous time, resp.).
3.3. Mechanism for PU Appearance
The presence of PU disturbs or completely jams secondary user's activity. The appearance of PU may lead to link breakage. So, SUs need to have mechanism through which they will sense PU presence. The channel at which the PU stays must not be used by the SU until the PU ceases out of the channel. Hence CR users must be provided with a procedure through which they deal with the arising of the PU on a channel. The simplest way is that a CR user must be forbid from hopping those channels which is using by a PU [14]. The mechanism of this type of rendezvous for PU appearance is depicted in Figure 11.

Rendezvous mechanism for PU appearance.
4. Performance Evaluation
We evaluate our scheme in terms of five performance criterion, including TTR (ATTR and MTTR), effect by PU appearance, average channel load, channel utilization ratio, and degree of overlap. Comparison targets are two synchronous CH protocols such as M-QCH, SYNC-ETCH, and three asynchronous CH protocols such as SeqR, ASYNC-ETCH, and A-MOCH.
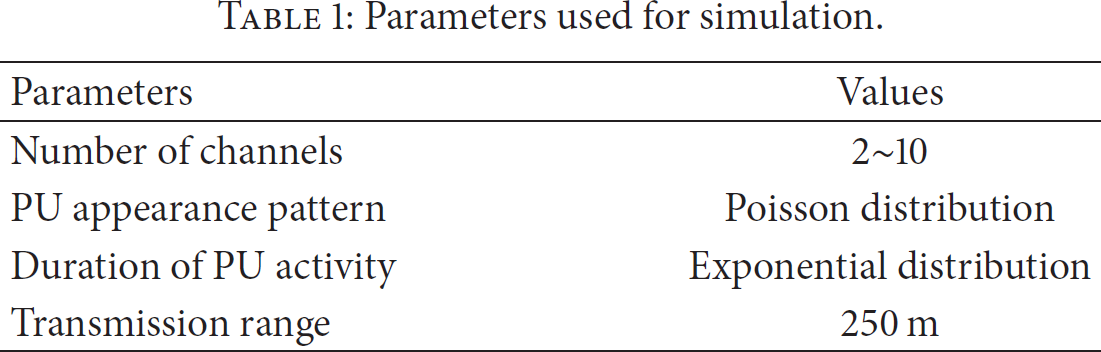
The performance evaluation is carried out by both theoretical and simulation study. The layout of the CR sensor networks is considered to have 2 to 10 rendezvous channels (Table 1). The SUs are considered to be inside the coverage area of the PU. During the simulation, we randomly check the availability of the PU using Poisson distribution. The rendezvous channels are disabled for a random time period upon the appearance of the PU. The senders always obey the receiver sequence and this process is repeated until the simulation ends.
Parameters used for simulation.
4.1. TTR Performance
We first studied the performance of S-CHS and A-CHS in terms of TTR. TTR refers to the time needed by any two CR devices for rendezvous using hopping sequences, and it is computed by the number of time slots elapsed from the reference time to the rendezvous time. Bounded and short TTR helps in minimizing the channel access delay. As seen in the preceding section, with S-CHS, two CR nodes periodically rendezvous every (

In A-CHS, we can easily get TTR for N-channel CR sensor network by generalizing the example in Figure 3. Considering all possible clock drifts (delays), we have



Figure 12 shows ATTR and MTTR with Channel Hopping Protocols. As seen from this figure, A-CHS provides a better performance than other asynchronous CH protocols in terms of TTR (both ATTR and MTTR) for almost all values of N. So, A-CHS can be used to reduce the delay of MAC protocols for CR sensor network. S-CHS and M-QCH achieve shorter MTTR than SYNC-ETCH since S-CHS utilizes all available channels for rendezvous between two sequences, whereas SYNC-ETCH only utilizes a single point for rendezvous.

TTR performance of Channel Hopping Protocols.
4.2. TTR Dependency on PU Arising [14]
The following example illustrates an assumption that SUs sense appearance of PU at channel 1 and then prohibit themselves from hopping at that channel until the PU leaves the channel. In Figure 13, the shadow part designates the interval when channel 1 is occupied by PU.

Effect of a PU on S-CHS.
The occupation of a channel by PU highly affects the TTR of S-CHS and A-CHS since the channel is no more available for the rendezvous until the PU leaves the channel. For example, in Figure 13, the time to the next rendezvous will be doubled due to the occupancy of channel 1 by PU. In this case, ATTR is given by
More generally, assuming that p is the probability of a PU appears on a channel for a time slot T, then the probability that the PU will occupy this particular channel during the period is given by

As described earlier, the period of hopping sequence with S-CHS is 



As seen in Figure 14, when the number of channels is small, the PU appearance does not cause a significant change in ATTR with S-CHS. But, for large N (more specifically

PU impact factor.
4.3. Channel Load and Utilization Performance
Channel load is defined as the average fraction of nodes that any two CR nodes rendezvous on the same channel. Channel utilization ratio means the ratio of the number of utilized rendezvous channels to the total number of available channels. A large value of channel utilization ratio indicates that more channels are used for rendezvous. Figure 15 supports this fact. We can that S-CHS outperforms M-QCH in terms of average channel load and the channel utilization as we expected in the theoretical analysis. We can see that channel utilization ratio is inversely proportional to the number of channels in SYNC-ETCH, ASYNC-TECH, and SeqR. This figure also indicates that S-CHS provides similar performance in terms of the channel load and channel utilization ratio. As previously described, rendezvous channels are evenly distributed over all channels in both S-CHS and M-QCH. As a result, S-CHS and M-QCH will be more susceptible for channel congestion problem. Different pairs of sender and receiver normally construct default as well as different alternative hopping sequences. Therefore, the rendezvous points of these hopping sequences are different and their convergence is very low in case of A-MOCH mechanism. In addition, in a given period, the rendezvous channels are not found with equal probabilities. Such unfair distributions may result in traffic load to a certain channels over the others.
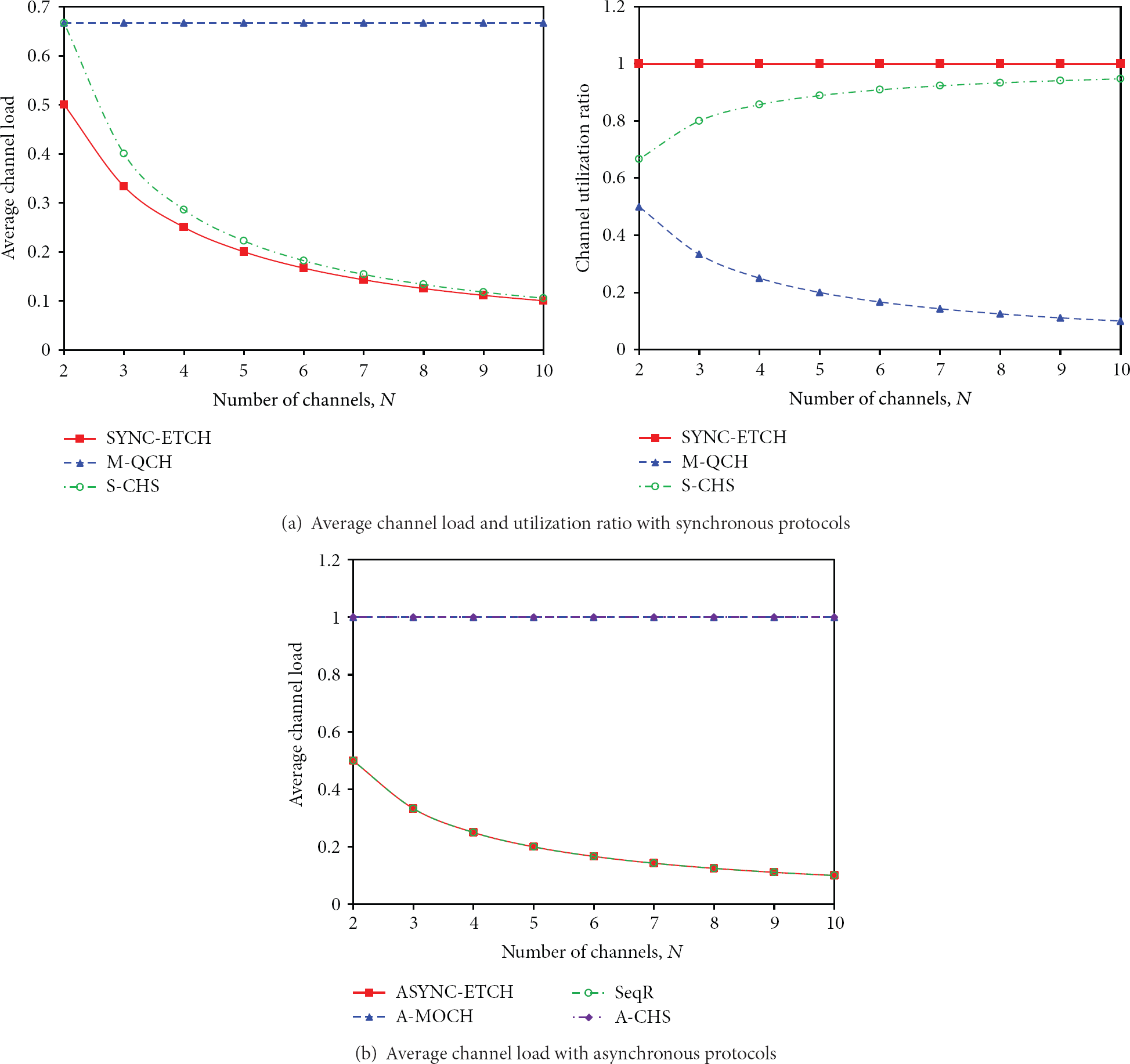
Average channel load and utilization ratio with the Channel Hopping Protocols.
4.4. Degree of Overlapping Performance
The overlapping or the intersection of two sequences in a hopping sequence period (counted by the number of time slots) is called degree of overlapping. Figure 16 shows that A-CHS, SYNC-ETCH, and SeqR are only overlapped at a single rendezvous point between any two given sequences. But, the degree of overlapping linearly increases as the number of available channels is increased in S-CHS, M-QCH, and A-MOCH.

Degree of overlap with Channel Hopping Protocols.
4.5. Summary
The comparison in terms of five different metrics, that is, ATTR, degree of overlapping, average channel load, MTTR, and channel utilization, is shown in Table 2. N and p denote the number of available channels and the probability of PU's appearance on a channel in a time slot, respectively.
Comparison of Channel Hopping Schemes.

5. Conclusion
In this paper, we proposed two Channel Hopping Mechanisms to establish a control channel in CR sensor networks: S-CHS and A-CHS. S-CHS performs connection establishment assuming global clock synchronization while A-CHS is based on the assumption that CR users start hopping at any time. Theoretical and simulation results showed that our schemes provide successful communication rendezvous within a bounded time interval. Moreover, A-CHS provides the best performance in terms of TTR, ant thus it can be used to reduce delay of MAC protocols. TTR performance with S-CHS is significantly affected by the appearance of PU as the number of available channels is increased whereas A-CHS shows a very stable performance in the ATTR under the effect of PU appearance although the number of channels is increased. S-CHS shows a very good performance in terms of average channel load and the channel utilization. The degree of overlapping linearly increases as the number of available channels is increased in S-CHS, whereas A-CHS is only overlapped at a single rendezvous point between any two given sequences.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the IT R&D Program of MSIP/KEIT (10041145, Self-Organized Software platform (SoSp) for Welfare Devices). This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korean government (MSIP) (2011-0029034). This work was supported by the Brain Korea 21 Plus Program.