The present paper provides a first step to a new approach to the theory of gearing, which uses modern differential geometry in order to ensure a strict and coordinate-independent formulation. Here, we are mainly concerned with a basic equation, namely, the equation of meshing, of two rotating surfaces in mesh. Since we are able to solve this equation by the time parameter, we derive parameterizations of the mating pinion from a bevel gear as well as a parameterization for gears produced by special machine tools.
1. Introduction
The definition of the tooth surface of a spiral bevel gear usually uses the settings of a special machine tool. In contrast, one needs an explicit description of the surface in Euclidean coordinates to generate such a gear on a CNC-machine. This seems to be complicated, since the computation of the envelope of a family of surfaces is involved in this process. Classical attempts like those presented in Litvin and Fuentes [1], as well as more recently approaches proposed by Dooner [2], rely on the introduction of several coordinate systems that are fixed to several parts of the machine tool. A first step towards a coordinate-free description can be found in di Puccio et al. [3]: the authors use the linear algebra of rotations. Nevertheless, if the rotations have nonintersecting axes, then this approach is not fully satisfactory, too.
The present paper provides an introduction to the theory of gearing within both mathematical and mechanical strict setting of Euclidean geometry. We use the theory of the Euclidean motion group, which is well known in mechanics, especially in control theory; see Bullo and Lewis [4]. The main advantages of this approach are as follows.
A coordinate-free description leads to expressions that are meaningful in both a mechanical and a mathematical sense.
For computations, one has to deal with one coordinate frame only, which one can choose freely.
The derived equations are very compact. Moreover, they lead to a clear understanding of the theory.
The approach provides an explicit solution of the equation of meshing in a very general situation.
By applying the latter result, one obtains explicit formulas for gear surfaces generated by special machine tools as well as for the mating pinion of a given bevel gear. Similar results can be obtained easily for spur gears.
In several subsequent papers, we will extend the theory to the kinematics, dynamics, and the geometry of gear drives. Most recently, the results have been applied to the remanufacturing of a pinion of a bevel gear drive; see [5] for the details.
The paper is organized as follows. First, we give a short review on motions of the Euclidean 3-space. In particular, we will need Rodrigues’ formulas (4) and (7). The third section is devoted to the equation of meshing: we consider surfaces Γ1,Γ2 in mesh, which are given by parameterizations in Euclidean coordinates. Viewed from a coordinate frame fixed to Γ2, the surface Γ1 performs a rigid motion and, thus, yields a family of surfaces. Then, Γ2 turns out to be the envelope of this family. This fact leads to a version of the (well-known) equation of meshing (17) which has a strict mechanical interpretation in our setting. In fact, we are able to solve the equation of meshing by the time parameter, and, hence, obtain an explicit parameterization (31) of Γ2. The last two sections are devoted to applications: first, we derive the parameterization of the mating pinion of an existing bevel gear. We remark that we may derive similar results for spur gears in the very same way. Finally, we investigate parameterizations of gears produced by face hobbing machines in a quite general context and apply the obtained results to spiral bevel gears.
2. Motions of the 3-Space
We will distinguish between points and vectors of the Euclidean 3-space E3 by adding a fourth component; that is, we will write for the point p ∈ R3 and for the vector v ∈ R3. Note that one may take a linear combination t1v1 + ⋯ + tnvn of vectors v1,…,vn as usual. Moreover, the sum P + v of a point P and a vector v yields a point, while the difference P − Q of two points P,Q is a vector, as expected. We point out that the sum of points is not defined (as the fourth component would be different from 1), but one can take affine combinations tP + (1 − t)Q. Finally, we agree on the following notation: for vectors , we put 〈v1 ∣ v2〉 = 〈v1 ∣ v2〉 (where 〈· ∣ ·〉 denotes the usual scalar product),det (v1,v2,v3) = det (v1,v2,v3), and v1∧v2 = v1∧v2 (where ∧ denotes the cross product).
An advantage of the notation introduced above is a very natural setting for affine maps α(p) = R·p + u, where R is a 3 × 3-matrix and u ∈ R3 denotes the translation part. Recall that the image of a vector v ∈ R3 is given by α(v) = R · v. These equations can be written as
that is, the affine map α is represented by the 4 × 4-matrix . An easy computation shows that the composition of affine maps is related to the multiplication of the corresponding matrices.
We are mainly interested in motions of the Euclidean space, that is, in those affine maps, which does not change the distance or the orientation. Recall that an affine map is a motion if and only if its linear part R is a rotation; that is, R fulfils RT·R = I3 and detR = 1, where the superscript T refers to the transpose of a matrix and Ik denotes a k × k-unit matrix. If we let SO(3) and SE(3) be the sets of all linear rotations and of all motions, respectively, then SO(3) and SE(3) are the so-called Lie groups, that is, groups with an additional structure of a smooth manifold such that the group operations become smooth maps. We will not go into details here; the reader will find an introduction (and all results cited below as well) in Bullo and Lewis [4].
The Lie algebraso(3) of SO(3) is the vector space of skew-symmetric 3 × 3-matrices. The following isomorphism of vector spaces will be used repeatedly:
The so-called hat-operator “∧,” whose inverse will be denoted by the superscript “∨,” has the following properties:
As usual, Lie group and Lie algebra are connected by the exponential map, which has a particular geometrical meaning in the context of rotations: if ω ∈ R3 has length and if t is a real number, then the exponential
is a rotation with axis R·ω and angle t. We will refer to (4) as the formula of Rodrigues. Note that
There is also a hat-operator for the Lie algebra se(3) of SE(3); namely,
In the sequel we will identify R3 and so(3) as well as R3 × R3 and se(3) with respect to the hat-operators given in (2) and (6), respectively.
Rodrigues’ formula (4) can be extended to the exponential function se(3) → SE(3) of the Euclidean motion group (cp. [4, 5.1.3]). For the case of rotation, one obtains the following results: consider an element ξ = (ω,v) ∈ se(3) = R3 × R3. Then is a rotation for every t if and only if ω≠0 and 〈ω ∣ v〉 = 0. If, in addition, |ω| = 1, then the exponential of (which is given by the usual power series) is given by
The map defined by (7) is a rotation with axis ω ∧ v + R · ω and angle t. Notice that v = − ω∧q holds for every point of the axis of the rotation. Moreover, analogous to (5), we obtain for ξ ∈ se(3) a point P and a vector v that
Every motion A ∈ SE(3) induces a bijective linear map Ad(A) of the Lie algebra se(3) by putting . We may also write with respect to the identification of se(3) and R3 × R3, where AdA is the 6 × 6-matrix:
The function Ad is commonly called the adjoint operator of the Lie group SE(3). The derivate
directly leads to the adjoint operator of the Lie algebra se(3).
Finally, we agree on the notion of a coordinate frame of the Euclidean space to be a quadruple (O,u,v,w) that consisted of a point O (the origin of the frame) and a right-handed orthonormal system (u,v,w) of vectors.
3. The Envelope of a Certain Family of Surfaces
We investigate a quite general situation in this section: we consider two surfaces Γ1 and Γ2 in the Euclidean 3-space E3 given by regular parameterizations:
We require that Γ1 is at least C2 and that Γ2 is at least C1. Notice that the vector
is parallel to the normal of Γj at the point Gj(r,s).
Let each of the two surfaces perform a rotation of constant angular velocity around a fixed axis. These rotations are given by and , respectively, where ξj = (ωj,vj) ∈ se(3) satisfies |ωj| = 1 and 〈ωj ∣ vj〉 = 0 and μ denotes the signed ratio of angular velocities. We require that μω2 − ω1 does not vanish. The angle t of the first rotation will be regarded as the time parameter in the sequel.
One may consider and as transformation matrices from a given spatial frame Σ to (moving) body frames B1, B2 which are rigidly connected to the surfaces Γ1 and Γ2, respectively. Taking an appropriate offset, we may achieve that all three frames coincide at the instant t = 0. In this picture, Gj(r,s) describes the surface Γj with respect to the body frame Bj, while and are the parameterization of Γ1 and Γ2, respectively, at the instant t = t0 with respect to the spatial frame Σ. In the sequel, most of the computations will be done in the coordinate frame B2 of the second surface Γ2.
We assume that for each parameter (r,s) there exists an instant t = t(r,s) at which the points G1(r,s) and G2(r,s) are in contact. This implies that or, equivalently, that
Here, describes the motion of the surface Γ1 with respect to the body frame B2 which is rigidly attached to Γ2. Moreover, we require that the two surfaces share a common normal at their points of contact. As usual, this implies that Γ2 is the envelope of the family of surfaces given by the C2-function:
We refer the reader to Zalgaller [6] for a detailed discussion of envelopes. In particular, we obtain the following necessary condition, which is commonly called the equation of meshing: if F(r0,s0,t0) is a point of the envelope, then
Note that the equation of meshing states that the velocity of the point G1(r0,s0) at the instant t = t0 is perpendicular to the normal of Γ1 at G1(r0,s0) (cp. Figure 1).
Two surfaces in mesh.
By changing from the spatial frame to the body frame at t = t0 one can simplify (15) essentially as follows. Recall that describes the motion of Γ1 in the spatial frame. The so-called body velocity of Γ1 is given by
see Bullo and Lewis [4], p. 253 for details. Expressed in the body frame, (15) of meshing becomes
The latter equation can also be derived from (15) by the following easy computation:
3.1. Solving the Equation of Meshing
It will be more convenient to choose a coordinate frame such that the axis ω1∧v1 + R·ω1 of the rotation contains the origin. Consequently, we have that v1 = 0, whence we derive
Next, we consider a particular solution of (21). Then (23) implies that
If denotes the commutator of the Lie algebra se(3), then we obtain that
3.2. Solving for t and the Equation of the Envelope Γ2
We retain the preceding assumptions and notations. Additionally, let us assume that Δ(r0,s0) > 0; the case Δ(r0,s0) = 0 has to be treated separately. Then Δ(r,s) > 0 holds in an open neighborhood U of (r0,s0). The sign in the solution (26) can be chosen from (28) in a geometric way. For example, in the situation described in Figure 2, the normal component of the velocity of the point G1 = G1(r0,s0) changes its sign from positive to negative at t = t0, whence we choose the negative root of Δ.
Choosing the sign of .
Therefore, say we have that (cos (t0),sin(t0)) = (C−(r0,s0),S−(r0,s0)). Then, an at least continuous function t(r,s) with ϕ(r,s,t(r,s)) = 0 for all (r,s) ∈ U and with t(r0,s0) = t0 satisfies
as the change of the sign of the square root is only possible at points (r,s) with Δ(r,s) = 0. Locally at (r0,s0), the function t(r,s) can be obtained by applying an “intelligent” arctan to (30). Globally, the existence of t(r,s) cannot be guaranteed in general: the map t:U → R is a lifting of the map U → S1;(r,s)↦(C−(r,s),S−(r,s)) with respect to the usual covering map R → S1 of the circle S1. However, such lifting always exists for convex domains U.
If t(r,s) exists on U, then we obtain a C1-parameterization:
which describes the surface Γ2. Note that the equation of meshing is automatically fulfilled, but G2(r,s) may not be a regular parameterization.
4. Bevel Gear Drives
We consider a bevel gear drive consisting of a gear Γ1 and the (theoretical) pinion Γ2. We retain all notations of Section 3. Moreover, we choose the intersection point of the axes of the gear and the pinion as the origin of the spatial frame. Then we have that v1 = v2 = 0. By choosing the axes of the spatial frame, we achieve that ω1 = (0, 0, 1) and that ω2 = (sin σ,0, cos σ), where σ denotes the shaft angle; see Figure 3.
Settings of the bevel gear drive.
Moreover, let
We compute , , and 〈ω1 ∣ ω2〉 = cos σ. Dividing (21) by leads to
Thus, if is strictly positive, then (33) is solved by
If we are dealing with one tooth flank only, then we may achieve that t is between − π/2 and π/2 by taking an appropriate time offset. A short computation leads to the following explicit formula:
Consequently, the mating pinion Γ2 is given by
note that this may not be a regular parameterization. If Γ2 has a normal at its point G2(r,s), then the normal is given by
The results obtained so far can be applied to the remanufacturing of the pinion of a bevel gear drive. To this end, one measures the tooth of the existing gear by a 3D-coordinate measuring machine and obtains a set of points , j = 1,…,n, of the tooth in Euclidean coordinates. The corresponding normals , j = 1,…,n, can either be measured, too, or can be derived from the point cloud by applying tools from image geometry; a typical result (with reduced number of points) of such a measurement is given in Figure 4. A crucial condition for the quality of the replacement pinion is the measurement of sufficiently many points. Experiments show that about 100 points/mm2 lead to satisfactory results.
Measured point cloud and normals of a gear tooth flank.
After having performed the measurement, we compute and then the instant at which the point is in contact with the pinion; see (35). Applying formulas (36) and (37) yields the results
where is the point of the mating pinion which is in contact with at and is the corresponding normal of the pinion's tooth flank. If we consider the real-valued function
on the discrete point set , then the instantaneous contact lines (i.e., the curves at which the pinion is in contact with the gear at a certain instant t = t0) are the level sets of λ. This fact makes the computation of the instantaneous contact lines accessible for fast algorithms from discrete geometry. Figure 5 shows the result of such a computation.
Instantaneous contact lines on the computed pinion.
We obtained the theoretical pinion belonging to the existing gear so far. By an appropriate tooth surface modification, we can improve the meshing performance of the gear drive, cp. [5] for the techniques used in this step. Finally, the pinion is produced on a CNC machining center; therefore, one can benefit from the description of the surface in terms of Euclidean coordinates.
5. Generation of Spiral Bevel Gears by Special Machine Tools
The objective of this section is to derive a parameterization of the gear tooth surface produced by a face hobbing machine. The blade of the head cutter performs a rotation, which is given by an infinitesimal rotation ξb = (ωb,vb) ∈ se(3) with |ωb| = 1 and 〈ωb ∣ vb〉 = 0 in the initial position. We will describe the blade by a curve
and require that B(s) does not intersect the axis ωb∧vb + R·ωb; that is, b(s) and ωb are linearly independent. Performing the rotation of the head cutter, we obtain a surface of revolution
which we will refer to as the generating surface. Since the head cutter is installed on the rotating cradle, it performs a rotation itself, which is given by ξ1 = (ω1,v1) ∈ se(3) with |ω1| = 1 and 〈ω1 ∣ v1〉 = 0. Moreover, we let the rotation of the gear blank be given by ξ2 = (ω2,v2) ∈ se(3) (again |ω2| = 1 and 〈ω2 ∣ v2〉 = 0); the ratio of angular velocities of the rotations of the cradle and the gear blank will be denoted by μ. We agree on the usual assumption that the blade rotation does not influence the gear generation; that is, the gear tooth surface Γ2 will be the envelope of the family .
The vector nb(s) = b′(s)∧(ωb∧b(s)) = 〈b(s) ∣ b′(s)〉ωb − 〈ωb ∣ b′(s)〉b(s) is perpendicular to the surface Γ1 at the point G1(s,0) = B(s). Since b(s) and ωb are linearly independent, nb(s) does not vanish. Consequently, the vector
is parallel to the normal of Γ1 at G1(s,θ). Putting leads to the equation of meshing:
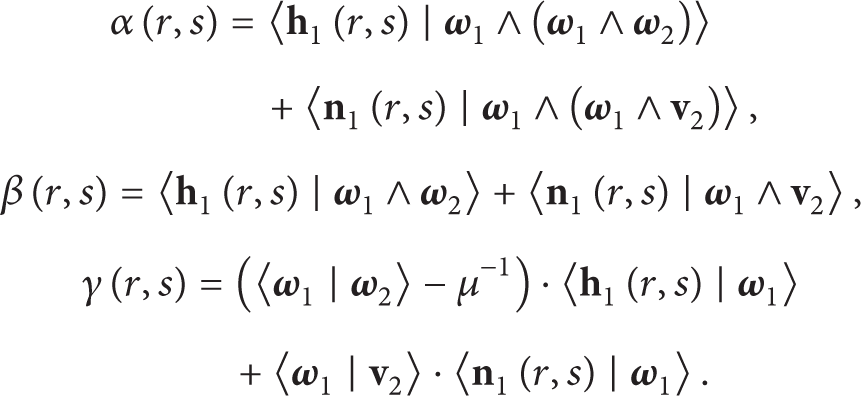
cp. (17). A straight-forward computation shows that
where
We reuse the arguments given in Section 3 and obtain the following: as long as Δ≔α2 + β2 − γ2 is strictly positive, (44) has precisely two solutions (cos (θ), sin(θ)), namely,
By Rodrigues’ formula, we can write the corresponding rotation as a function of (s,t):
Therefore, the envelope Γ2 in question is contained in the surface with the parameterization
whence we obtained an explicit description of this surface in Euclidean coordinates. It is worth noting that the normal of Γ2 at the point G2(r,s) is given by
provided that the parameterization given by (48) is regular at (s,t).
5.1. Plane Blades
We retain the preceding notations and conventions. Additionally, we require that the blade curve ωb∧vb + b(s) and the axis ωb∧vb + R·ωb are contained in the same plane. We choose a right-handed coordinate system (μb,ηb,ωb) such that νb = r·μb holds for some r ≥ 0. By taking an appropriate offset for θ we may achieve that
recall that the blade curve does not intersect the axis of the head cutter. Dividing (44) by x(s) yields
where
For computational purposes, it is useful to know that
5.2. Generation of the Gear
For the generation of the gear of a spiral bevel gear drive, the axes of the cradle and of the head cutter are chosen to be parallel, whence we may take ω1 = ωb = (0, 0, 1). As usual, the blank offset and the machine center to back are set to 0. Therefore, the axes of the cradle and of the gear blank meet. We choose the intersection point to be the origin of the coordinate frame and, hence, obtain that v1 = v2 = 0. Moreover, the so-called cradle angle q2 simply is an offset for the cradle rotation, so we can neglect it, too. Finally, we arrange the x-axis of the coordinate system in a way such that ω2 = (cos (γm), 0, sin (γm)), where γm is the root angle of the machine tool. Figure 6 contains the basic settings defined so far.
Settings of the machine tool.
The plane blade of the head cutter is given by the curve
Here, Sr denotes the radial setting. Rotating B(s) around the axis of the head cutter yields the following parameterization of the generating surface Γ1:
The following vector is parallel to the normal of Γ1 at g1(s,θ):
A short computation shows that the family (14) of surfaces is given by
where
Putting
we easily derive . Up to a constant scalar, we can take , which in turn leads to
We obtain the equation of meshing (up to a constant factor) as follows:
Putting , we can rewrite the latter equation as
where
This equation can be solved as before: as long as Δ = α2 + β2 − γ2 > 0, (62) has precisely two solutions:
We change the coordinate frame by retaining the origin and the y-axis and by letting ω2 be the directional vector of the new z-axis. With respect to the new coordinate system, the parameterization of the generated gear becomes
We point out again that exists for all (s,t) with Δ(s,t) > 0 (or with Δ(s,t) = 0 and γ(s,t)≠0), but (65) may fail to be a regular parameterization at (r,s).
5.3. Experiment
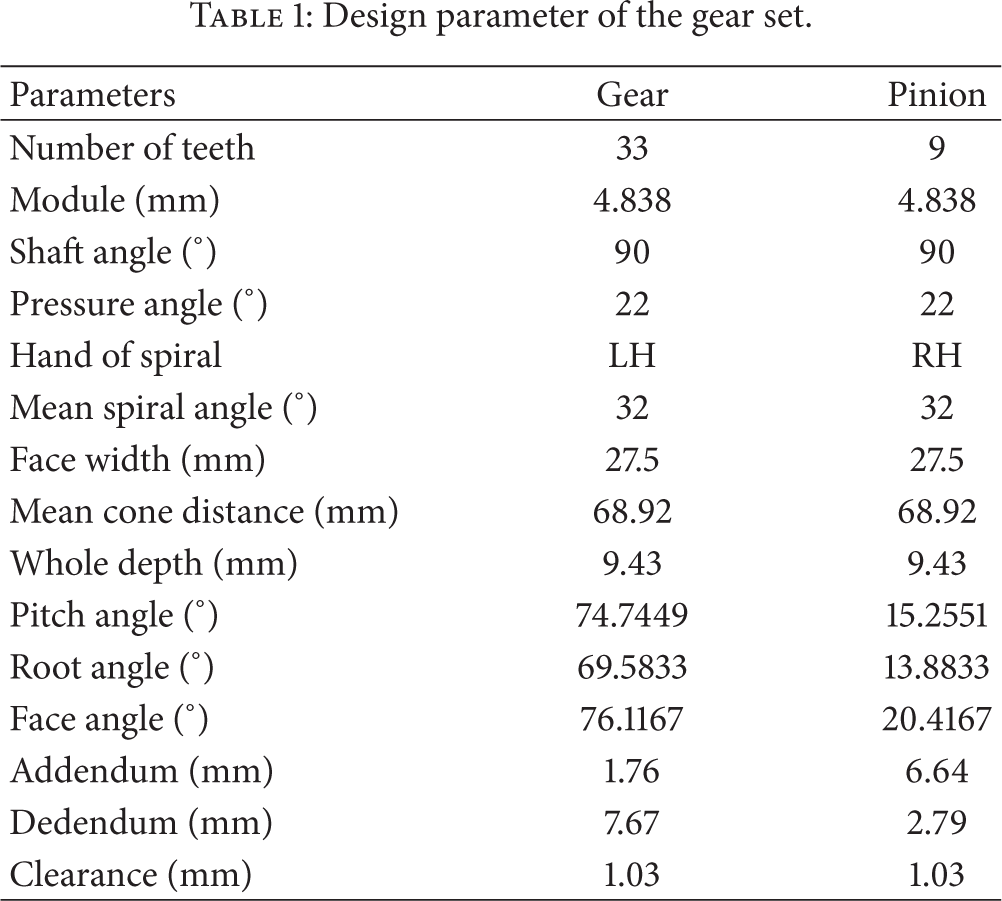
As an application, we consider a spiral bevel gear whose data stem from [1] (cp. Table 1).
Design parameter of the gear set.
Parameters
Gear
Pinion
Number of teeth
33
9
Module (mm)
4.838
4.838
Shaft angle (°)
90
90
Pressure angle (°)
22
22
Hand of spiral
LH
RH
Mean spiral angle (°)
32
32
Face width (mm)
27.5
27.5
Mean cone distance (mm)
68.92
68.92
Whole depth (mm)
9.43
9.43
Pitch angle (°)
74.7449
15.2551
Root angle (°)
69.5833
13.8833
Face angle (°)
76.1167
20.4167
Addendum (mm)
1.76
6.64
Dedendum (mm)
7.67
2.79
Clearance (mm)
1.03
1.03
We consider a generating tool Γ1 with a straight blade profile and a circular fillet at the top. The geometrical parameters of the tool and the machine settings are taken from [1] again, see Table 2.
Tool parameters and machine settings.
Parameter
Symbol
Convex and concave side
Cutter radius (mm)
Rg
63.5
Blade angle (°)
αg
22
Point width (mm)
Pw
2.54
Root fillet radius (mm)
ρw
1.524
Radial distance (mm)
Sr
64.3718
Cradle angle (°)
q
−56.78
Sliding base (mm)
ΔXB
−0.2071
Machine root angle (°)
γm
69.5833
Velocity ratio
μ
1.032331
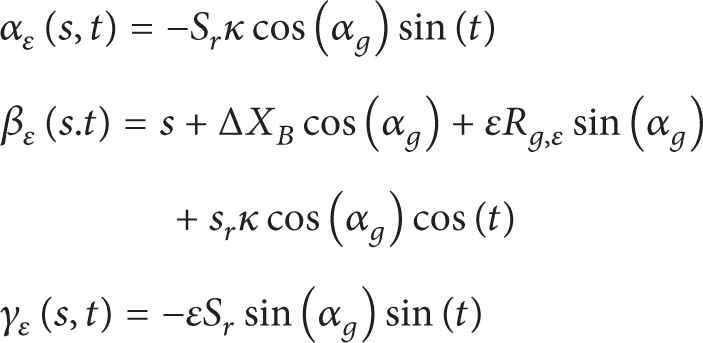
Note that both the blank offset and the machine center to back are set to 0 mm. Putting ε = + 1 for the concave side and ε = − 1 for the convex side of the tooth, the parameterization of the parts of the blade required in (54) is given by
(where Rgε is the usual cutter point radius) for the straight parts of the blade, and by
for the circular fillets. The coefficients in the (62) of meshing hence become
for the straight parts and, up to the common factor ρw,
for the circular fillets. The constant κ contained in the equations above is given by (59).
The analytic parameterization (65) of the surface has been computed by the symbolic toolbox MuPAD of MATLAB on an Intel Core i7 with 2.93 GHz and 8 GByte RAM. MuPAD prompted 0 seconds for the complete computation of the parameterization of all parts of the tooth surface. The plotting time for all five surfaces with the usual mesh of [25, 25] each took 6 seconds. The production of Figure 7 has been much more expensive (around 800 seconds for 50,000 nodes): as MuPAD cannot handle parameter sets of surfaces other than rectangular ones, one has to use quite tricky methods to restrict the surface to the body of the gear blank. However, we point out that Figure 7 is not derived from any discrete data but is a picture of the analytic surface of the gear tooth.
Generated gear surface.
Finally, we remark that we are using the analytical parameterization of gears in order to obtain a point cloud describing the gear surface of appropriate precision. By overlaying random errors to the data, one can investigate the influence of errors given by measurement, by surface errors, or in algorithm used for the processing of the point cloud to the mating pinion.
6. Conclusions
An approach based on modern mechanics was proposed for the theory of gearing. Avoiding chains of coordinate systems, we achieved a more compact formulation of the theory. Moreover, the terms appearing in the equations have a precise mechanical meaning, which is independent of the coordinate frame. As a first application of the new approach, explicit formulas for the surface of a spiral bevel gear generated by a gear hobbing machine as well as for the surface of the mating pinion of an arbitrary bevel gear were given. Several computer experiments done so far show the accuracy and the effectiveness of the new approach.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This research has received financial support from the National Natural Science Foundation of China (no. 51205025) and was supported by the Funding Project for Academic Human Resources Development in Beijing Union University of China (BPHR2012E02), for which the authors are very appreciative.
References
1.
LitvinF. L. and FuentesA., Gear Geometry and Applied Theory, Cambridge University Press, Cambridge, UK, 2nd edition2004.
2.
DoonerD. B., The Kinematic Geometry of Gearing, John Wiley & Sons, Chichester, UK, 2nd edition2012.
3.
di PuccioF.GabicciniM., and GuiggianiM., “Alternative formulation of the theory of gearing,”Mechanism and Machine Theory, vol. 40, no. 5, pp. 613–637, 2005.
4.
BulloF. and LewisA. D., Geometric Control of Mechanical Systems, Springer, New York, NY, USA, 2005.
5.
LeiB.ChengG.LöweH., and WangX., “Remanufacturing the pinion: an application of a new design method for spiral bevel gears,”Advances in Mechanical Engineering, vol. 2014, Article ID 257581, 9 pages, 2014.
6.
ZalgallerV. A., Theory of Envelopes, Nauka, Moscow, Russia, 1991, (Russian).