
Abstract
This paper proposes a new separable model for the sensor locational decision problem covering a line (SLDPCL). By decomposing a multivariate function into several univariate functions, a separable outer approximation methodology that can be used to improve the outer approximation of classical convex programming technique is presented. A novel outer approximation method (OAM) for this proposed separable model is proposed. The algorithm alternates between solving a mixed integer linear program and a convex nonlinear program (NLP). An improved interior point method based on optimal centering parameter is employed to solve the NLP subproblem. The simulation results for test instances that range in size from 10 to 20000 sensors show that the proposed method is fast and robust, and the method is very promising for large-scale SLDPCL problems due to its excellent scalability.
1. Introduction
Sensor locational decision problem covering a line (SLDPCL) is a problem to find a subset covering a given length segment at minimum cost with giving a set of sensors. And these sensors have variable radii with costs depending on their radii and fixed costs [1]. This problem was motivated by the following application. There is a river in a city, over which we need to track possible activities of objects or people. For this purpose, we need to locate a set of sensors so that every point on the river is under supervision by at least one sensor. It is assumed that (i) the river can be modeled as a tree network consisting of line segments and (ii) each sensor has a field of view defined by a radius. It is reasonable to view the river as piecewise strips of finite lengths. Then we may focus on the problem for a strip. The above problem for a strip can be viewed as an SLDPCL. Although the problem is easily stated, the actual locational decision is complicated due to some additional factors. Coverage depends not only on the river topology, sensor type, and power, but also on several parameters such as width of river and obstacles over it, potentially forbidden areas where sensors may not be located, and other characteristics associated with the physical environment, for example, the atmospheric and water conditions. Readers can further refer to [2] for further details on this scenario.
In this paper, a new separable mixed integer nonlinear programming (MINLP) formulation for the SLDPCL problem by decomposing the multivariate function into several univariate functions is presented. The outer approximation of a decomposed equivalent is tighter than the direct outer approximation of the original multivariate problem, so a tighter separable outer approximation methodology is proposed to improve the existing outer approximation method (OAM). Then, an improved OAM is proposed to solve the separable formulation for SLDPCL problem. This novel method consists of solving an alternating sequence of a nonlinear programming (NLP) problem and a mixed integer linear programming (MILP) problem. In order to solve the NLP problems efficiently, a new quickly interior point algorithm was presented based on the techniques of optimal centering parameter (OCP) and multiple centrality correction (MCC). At last, the novel OAM integrating improved interior point method (IPM) is presented to solve this separable model for SLDPCL problem. Ten to 20000 sensors instances have been solved by the proposed method, and the results show that the method is scalable for large-scale SLDPCL problem. The main contributions of this paper are as follows.
By simply introducing an auxiliary variable, we move the nonlinear function from objective function to constraints for the classic MINLP formulation of SLDPCL problem. After letting equivalent several univariate functions substitute for a multivariate function, we obtain a new separated formulation for SLDPCL problem. An improved OAM is presented to solve the SLDPCL problem based on the aforementioned separated formulation. The proposed method can obtain tighter MILP relaxation than the traditional OAM does. Solving infeasible subproblem is not needed for the improved method, because all feasible solutions of the MILP relaxations are feasible for the corresponding SLDPCL problem as well. A new quickly interior point algorithm was presented for solving NLP subproblems based on the techniques of OCP and MCC. Named as I-IPM, the proposed method involves integrating equilibrium distance-quality function (ED-QF) to establish a mathematical model for evaluating centering parameter. And the approximate expression of this model, which can be solved with fewer computations than the original one, was proposed using the linearization technique. After solving the approximate model with the line search technique, the optimal centering parameters can be obtained for the proposed method to own longer step length and less number of iterations than other IPMs. The aim of using MCC is twofold: (a) to increase the step length in both primal and dual spaces and (b) to offer better convergence performances.
The rest of this paper is organized as follows. Section 2 introduces some related works in coverage of sensor networks, especially in SLDPCL. Section 3 describes the classic MINLP formulation of SLDPCL, and we present a separable formulation for SLDPCL based on the classic one in this section as well. In Section 4, we present the improved OAM to solve the separable formulation, which consists of solving an alternating sequence of NLP and MILP. In Section 5, we present an improved IPM to solve those NLP subproblems effectively. Simulations are conducted and the results are shown in Section 6. Finally, we conclude this paper and point out the future work in Section 7.
2. Related Works
There are many applications of SLDPCL. In [6], with the assumptions that (i) a set of potential resources; (ii) a fixed activation cost for each resource; (iii) the congestion heavily influences the cost of a resource, a single-commodity network flow problem can be formulated and solved by using SLDPCL model. The effect of introducing additional stops in the existing railway network can be formulated as an SLDPCL model as well. This problem is comprised of covering a set of points in the plane by sensors. And the centers of these sensors have to lie on a set of line segments that represents the railway [7]. If only one period is considered, the unit commitment problem in power system also can be formulated as an SLDPCL model [8].
SLDPCL is a special case of coverage in sensor networks. Coverage, which reflects how well a sensor field is monitored, is one of the most important performance metrics to measure sensor networks. Simply said, sensor coverage models are abstract models trying to quantify how well sensors can sense physical phenomena at some location, or, in other words, how well sensors can cover such locations. In sensor networks, coverage problems can arise in all network stages and can be formulated in various ways with different scenarios, assumptions, and objectives [9]. There are two important problems relating to coverage. The first one is to formulate mathematical model. The other one is to solve the large-scale coverage problem models efficiently.
2.1. Modeling Coverage Problems
Sensor coverage models measure the sensing capability and quality by capturing the geometric relation between a space point and sensors. Modeling coverage problems fall into the field of geometric covering, in which some points or some areas are required to be covered by geometric objects [10]. For example, Chvátal [11] introduces the art gallery problem, in which cameras are to be placed to watch every wall of an art gallery room. The room is assumed to be a polygon with n sides and h holes, and the cameras are assumed to have a viewpoint of 360° and rotate at an infinite speed. It is proved that at most
2.2. Solving Methods
The coverage problem often can be formulated as MINLP. As pointed in [14], this MINLP is NP-hard problem, which is rather difficult to solve efficiently for large-scale instances. For the problem in which a set of m fixed locations for radars and a set of n locations for the points are given, all located along a fixed line, [15] gives an
SLDPCL can be formulated as MINLP too, but it has some characteristics: (i) the need to cover a single line segment and (ii) a fixed activation cost for each sensor. According to these characteristics, searching more effective algorithm to solve SLDPCL is necessary. In [1], the authors provide an exact solution algorithm, based on a Lagrangian relaxation and a subgradient algorithm, to find a lower bound for SLDPCL. But the feasible solution only can be obtained by using a heuristic method. In [19], an
In the last 40 years, some algorithms have been proposed for solving convex MINLP to optimality [21]. In the early 70s, Geoffrion generalized Benders decomposition (BD) to make an exact algorithm for convex MINLP [21]. And in the 80s, Duran and Grossmann introduced the OAM [22]. Both BD method and OAM are decomposition strategies, which can solve MINLP efficiently. However, BD method and its variants use the dual information for outer approximation, while the OAM method and its variants are based on the use of the optimal primal information. So far, BD method has been used to solve the location problem successfully [23], which decomposes the location problem into a master problem that is an integer optimization problem and an NLP subproblem. However, to the authors’ knowledge, up to now, OAM method has not been used for solving location problem.
Solving the NLP subproblems efficiently plays a pivotal role in solving MINLP model for SLDPCL problem by using OAM method. IPMs [5] are currently considered the most powerful algorithms for large-scale NLPs. Some of the key ideas, such as primal-dual steps and center parameter, carry over directly from the LP case [4], but several important new challenges arise [24]. These include the strategy for updating the barrier parameter and the need to ensure progress toward the solution according to the structure of application problems.
3. Separable MINLP Formulation for SLDPCL
The traditional MINLP formulation of SLDPCL is reported in [1] by Agnetis et al. In this section, we give a separable MINLP for SLDPCL, which can be solved more efficiently by using decomposition strategies, especially by using OAM.
Suppose that there are q available discs (sensors), and they are represented by the set
For any selected disc

The objective function of the SLDPCL problem, representing the total cost to be minimized, has the form


The constraints of the SLDPCL problem are as follows.
Covering constraint is
Sensor coverage distance limits are
where


Constraints (5) force
Equations (4)-(5) are linear constraints. These constraints can be abbreviated as
Consequently, the SLDPCL problem is conveniently formulated as the following MINLP:


Problem (7) is special MINLP with separable constraint The other constraints and the object function all are linear.
4. OAM for Separable Mixed Integer Programming of SLDPCL
The OAM, a very successful approach to solving convex MINLP, was first developed by Duran and Grossmann [22] and then subsequently extended to a general mixed integer convex programming, nonconvex MINLP, and separable MINLP [25]. The OAM consists of solving an alternating sequence of a primal problem and MILP. A sequence of valid nondecreasing lower bounds and nonincreasing upper bounds is generated by the OAM which converges in a finite number of iterations.
In this section, we consider the solution of the SMIP formulation (7) for SLDPCL problem. The function g is convex and separable. By separable, we mean that the function g can be rewritten as a sum of some convex univariate functions [25]; that is,
The OAM solves SMIP formulation (7) by alternating finitely between an NLP subproblem and an MILP relaxed master problem. And this master problem is obtained by replacing the nonlinear constraints with their linear outer approximations taken in a set of points

The integer vector

We are now in a position to give the outer approximation algorithm in full detail [25].
Algorithm OAM
Initialization. Set the superbound
Step 1.
Solve the continuous relaxation of (7) with IPM; the optimal solution is
Do while
Step 2.
Construct MILP (8), and solve it with branch-cut method. The optimal solution of (8) is
Step 3.
Construct NLP (9), and solve it with IPM. The optimal solution of (9) is
Step 4.
End do
Step 5.
Output optimal object value
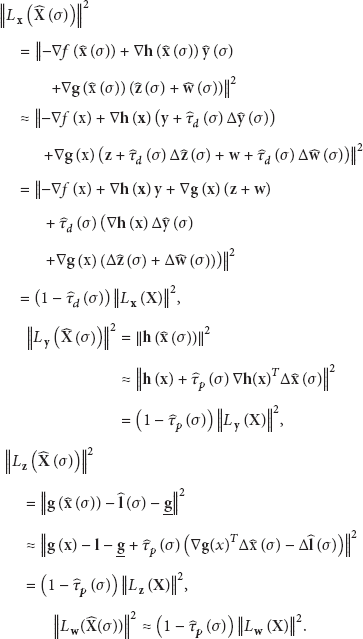
The convex function g can be outer approximated by subgradient inequalities through a single-step procedure that yields MILP (
First, based on the analysis above, in (7), we introduce an auxiliary variable

Clearly, if
Theorem 1.
Give points
It is easy to observe from Theorem 1 that the linear outer approximation MILP of (10) may be tighter than the one of (7). More precisely, Theorem 1 shows that, to obtain a linear relaxation of (7) of the same strength as a linear approximation of (10), one needs exponentially many linearization points. Thus, in general, we can expect the extended formulation to perform much better than the initial one in an outer approximation algorithm. Then, a tighter outer approximation master MILP for SMIP is given by

We want to note that the T-MILP(
In addition, according to the description of Algorithm OAM in this section, we know that there are two NLPs, (9) in Step 3 and the relaxation of (7) in Step 1, which need to be solved efficiently. IPM [5] is a very appealing approach to large-scale NLP. We present a new quickly interior point algorithm for solving these two NLPs based on the techniques of OCP and MCC in the following section.
5. Improved IPM for NLP
5.1. Primal-Dual IPM
IPMs became quite popular after 1984, when N. Karmarkar announced a fast polynomial-time interior method for linear programming [5]. In this subsection, we introduce classic primal-dual IPM and analyze the difficulty of setting centering parameter in IPM. Then, our improvement in setting centering parameter is proposed in the following subsections.
Without losing the generalization, we consider the NLP writing in a formal style as follows

By introducing slack variables in the inequality of constraints and introducing logarithmic barrier penalty terms in the objective function, we obtain the following logarithmic barrier problem for (12):

The Lagrangian function of (13) is
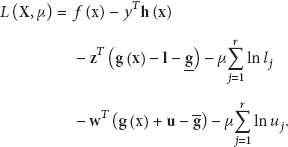
According to the gradients of the Lagrangian function with respect to variables 




Let

Denote (19) by
After determining the primal-dual direction

After enlarging step lengths

Let

Let

Then the primal-dual and centrality correction directions are combined to be the total direction
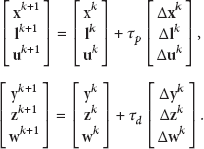
If we consider the total direction
After computing primal and dual step lengths

The centering parameter σ is very important for IPM [4]. If
5.2. Optimal Centering Parameter
The aforementioned methods of defining centering parameter are effective for solving linear programming, but all these methods are based on experience or experiment. In this subsection, we present a novel optimization model for σ, and the optimal σ can be obtained through minimizing the equilibrium distance-quality function (ED-QF) for the predicted iterating points.
Definition 2.
ED-QF for strict interior point
The following points are obvious.
So ED-QF contains the centricity and optimization of
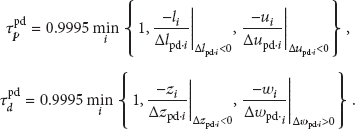
We are now in a position to give the model defining optimal σ. For iteration point

The evaluation of
According to (16)–(19) and (28), we have

According to (29) and

Note that
Algorithm OCP.
Initialization.
Step 1.
Compute
Step 2.
If
Step 3.
Step 4.
If
Step 5.
If
Step 6.
If
5.3. Improved IPM
Algorithm Improved IPM (I-IPM)
Initialization.
Step 1.
If
Step 2.
Compute σ by using Algorithm OCP and let
Step 3.
Compute the step lengths
Step 4.
MCC procedure.
Step 4.1. Set
Step 4.2.
Step 4.3. Compute
Step 4.4. If the number of corrections less than
Step 5.
According to (26), update the iteration point by using
6. Computational Results and Complexity
6.1. Computational Results and Analysis
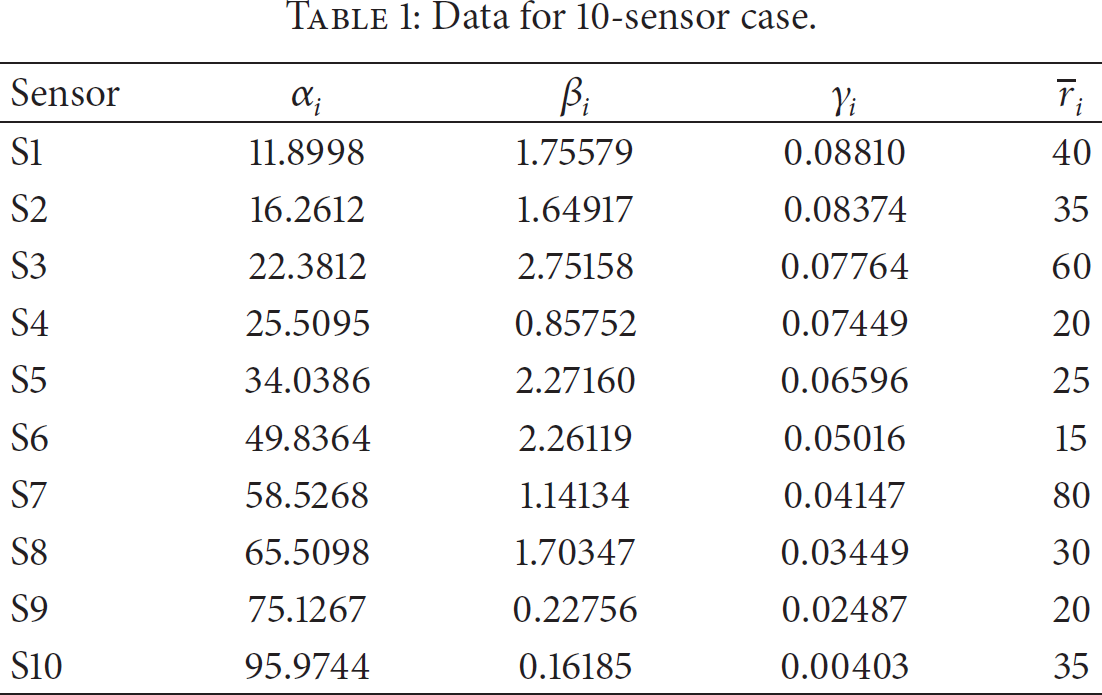
In this subsection we present some numerical results to test the impact of the separable formulation for the SLDPCL and the effectiveness of the proposed approaches. The machine on which we perform all of our computations is a Pentium (R) Dual Core 2.7 GHz Lenovo-PC computer with 2GB RAM, running MS-Windows 7, and Matlab 2010b. In the implementation of our algorithm, OAM described in Section 3, MILP master problem has been solved by calling MOSEK 6, while NLP problems have been solved by using Algorithm I-IPM. Test cases with sensors ranging from 10 to 20000 are used for simulation. Data of 10-sensor case are all listed in Table 1 and
Data for 10-sensor case.
The Algorithm OAM is carried out for two different models (7) (nonseparated) and (10) (separated), which are denoted as OAM (primal OAM) and S-OAM (separated OAM), respectively. We first compare the tightness of the outer approximation master problems (8) and (11). The results are displayed in Table 2, which presents the lower bound at the first iteration for each strategy. The column “q” reports the total number of sensors, while columns “Va-(8)” and “Va-(11)” report the optimal values of the outer approximation master problems (8) and (11) at the first iteration, respectively. The results show that, as expected, the outer approximation of a separated equivalent is tighter than the direct outer approximation of the original multivariate problem.
Comparison of 2 models in tightness.

The results of 10-sensor case are listed in Table 3. Note that once
Results of 10-sensor case.


Illustration of 10-sensor case.
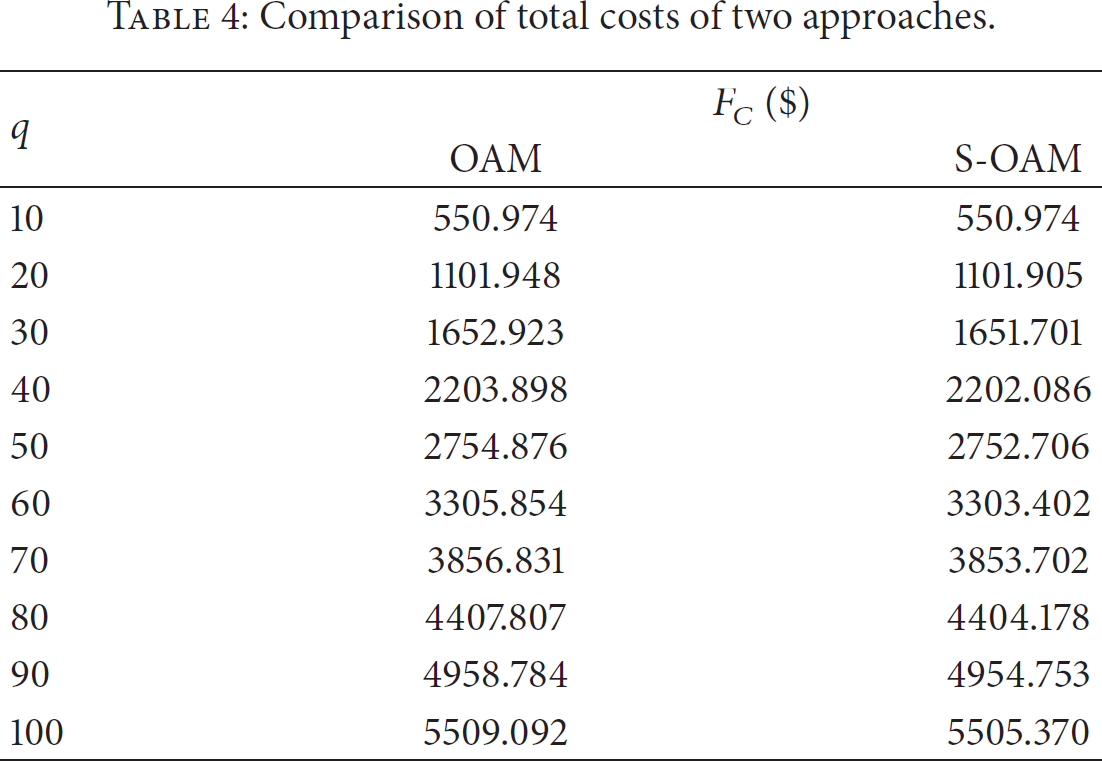
In addition, for the purpose of comparison, we implement OAM, S-OAM two different strategies on the test cases with sensors ranging from 10 to 100. The comparison of the total costs of the two approaches is presented in Table 4. “
Comparison of total costs of two approaches.
We note that (6) is a mixed integer quadratic programming (MIQP), which can be solved by many efficient general-purpose mixed integer programming solvers such as MOSEK, CPLEX, and GUROBI. We solve (6) with MOSEK directly by setting the accuracy to 0.1 and 0.05, which are the relative optimality tolerances employed by the solver. The comparison of the results between MOSEK and our approach is presented in Table 5, where columns “
Comparison of S-OAM and MOSEK.

“—” denotes that MOSEK cannot reach the preset accuracy for this instance within preset 3600 seconds.
Perspective function is a well-known tool in convex analysis. By using this tool, Frangioni reformulate SLDPCL as an MISOCP [3]. And it can be solved by using MOSEK too. To test the efficiency of the proposed method, we further compare it with MISOCP method [3]. We set the termination tolerance to 0.05 for MOSEK. The comparison of the results between MISOCP and our approach is presented in Table 6. And Table 6 shows that solving MISOCP with MOSEK for SLDPCL takes 2-3 times longer running time or even more than our method when the quality of the solutions is of the same level.
Comparison of S-OAM and MISOCP.

“—” denotes that MOSEK cannot reach the preset accuracy for this instance within preset 3600 seconds.
The average operation cost for one sensor (shown in Figure 2) is an important factor to validate the proposed method. In Figure 2, lines “MOSEK-0.1” and “MOSEK-0.05” report the results of solving (6) with MOSEK directly by setting the accuracy to 0.1 and 0.05, respectively; line “MISOCP” reports the results of solving MISOCP model of SLDPCL, while line “S-OAM” reports the results of proposed method. As can be seen in Figure 2, the average operation costs provided by proposed method are lower than the ones provided by other methods for all cases.

Comparison of cost per sensor with the number of sensors.
Figure 3 depicts the relationship between the CPU time and the number of sensors for three methods. The execution times used by proposed method increase nearly linearly as the number of sensors increases (Figure 3), while the other three lines sharply go up as the number of sensors increases. Figure 3 shows that the proposed method suits large-scaled SLDPCL problems.

CPU time with the number of sensors.
There are two NLPs in Steps 1 and 3 of Algorithm OAM, which are solved with the Algorithm I-IPM presented in Section 4. We will show the efficiency of the proposed novel I-IPM in the following paragraphs.
After deleting Step 4 from Algorithm I-IPM, set

Comparison of 4 algorithms in the average step length.
When different IPM was used to solve the relaxation of (7) for our proposed S-OAM algorithm, Table 7 gives the number of iterations to convergence and CPU times for the PDIPM [4], PCIPM [5], and I-IPM algorithms. It is obvious that I-IPM dominates the other IPMs both in number of iterations and CPU times.
Comparison of 3 IPMs in results.

6.2. Complexity Estimate
In full generality, SLDPCL is a challenging optimization problem, as SLDPC combines the difficulty of optimizing over integer variables with the handling of nonlinear functions. As pointed in [14], it is NP-hard problem. In our method, we reduce this NP-hard problem to MILP and convex NLP. The convex NLP can be solved efficiently by using proposed I-IPM in polynomial times. MILP can be solved by using the off-the-shelf MILP solvers effectively, although it is an NP-hard problem as well. Then, the complexity of proposed method depends on three aspects. The first one is complexity of I-IPM. Let
7. Conclusions
SLDPCL problems come from many application problems in common with tremendous number of variables and constraints. In this paper, we combine OAM and IPM and give a novel S-OAM for SLDPCL. Our algorithm can get good CPU time and high-quality solutions. Furthermore, our S-OAM approach could be improved in at least two ways: (a) by using the preprocessing procedure in order to fix on some binary variables before the calling of our algorithm; (b) by embedding I-IPM in a branch-and-cut approach, like that of MOSEK, in order to improve the efficiency of solving sub-problems.
Footnotes
Conflict of Interests
The authors declare that they do not have any commercial or associative interest that represents a conflict of interests in connection with the work submitted.
Acknowledgments
Our works are supported by Guangxi Natural Science Foundation (2013GXNSFBA019246), Guangxi Experiment Center of Information Science, the Project Sponsored by the Scientific Research Foundation of Guangxi University (XJZ110593), and National Natural Science Foundation of China (71201049, 61163060).