
Abstract
We present a localization of sound sources algorithm for underground parking lots and a compensation algorithm for enhancing localization of sound sources based on the least-squares method (LSM). The proposed localization of sound sources system is designed for the underground parking lots in apartments. The sound location algorithm is referred to as
1. Introduction
Criminal activities frequently occur in various indoor or outdoor areas. People have strong safety concerns walking or working in those areas [1, 2]. Closed-circuit TV (CCTV) cameras are usually deployed as surveillance cameras to monitor those areas to give people some safety assurance. Surveillance cameras can provide hints to the police for them to arrest the suspect quickly. However, there are blind spots which even multiple surveillance cameras cannot cover because most of surveillance cameras directly focus on their responsible spots. So it is very difficult to monitor criminal activities if they unfortunately happen at a blind spot.
In order to avoid issues related to this blind spot problem, technologies such as sound sources detection, image recognition, and behavior identification developed by advanced IT research institutes and companies are widely used. For example, the “ear cap CCTV” module developed by INTEC Video Systems can be attached to the ear of somebody walking on the street or working in the office to monitor possible attackers approaching him or her.
It is known that localization of sound sources technology can be very useful in military for detecting the sound sources (angle or location) of the enemy troops in war. The R&D efforts on localization of sound sources started a few years ago, and commercial products based on the localization of sound sources technology have been manufactured. These products are usually supplied to the military rather than the commercial market.
We believe that the localization of sound sources technology can be adapted to monitor underground parking lots in apartments in South Korea for detecting the location of originating sounds of car moving for the security purpose, as sounds loudly occur when cars are incoming or outgoing in/out of the parking lots because of the special painting on the ground. The proposed algorithm for localization of sound sources for underground parking lots can detect the sound originated from an incoming or outgoing cars among various sound sources in the parking lots so that the surveillance camera can be rotated to the direction of the incoming or outgoing cars, especially in the blind spots, without any difficulties. Localization of sound sources in underground parking lots gives us important benefits. It can increase the safety of residents in apartments and the associated installation cost is relatively low by having the localization of sound sources system instead of the traditional surveillance camera system.
However, the error rate of the localization of sound sources without a compensation algorithm is frequently high in real localization environments. Thus, the compensation algorithm in the localization of sound sources system is absolutely necessary to enhance the performance of the localization accuracy. In order to analyze the proposed algorithm integrated with the compensation algorithm for localization of sound sources, we have developed the “sound source receiving and analysis module” where the proposed algorithms are executed. The proposed localization of sound source system integrated with the compensation algorithm can control the camera to rotate to the estimated direction instantly.
Conventional surveillance camera systems that have no rotation functionality are commonly installed in most of the apartments in South Korea so far. Three or four cameras are attached to the ceiling in the middle of underground parking lots. Therefore, some blind spots which the conventional surveillance camera system cannot cover frequently exist in the parking lots due to insufficient installation of cameras due to the high installation cost.
In this paper, we present a localization of sound sources algorithm for underground parking lots as well as a compensation algorithm for the localization of sound sources system based on the least-squares method (LSM). In addition, we compare the performance of the proposed algorithms using the data collected from a real underground parking lot. The sound source direction localized from the localization system is used for rotating the CCTV cameras to monitor the moving car (the sound source) in the blind spots.
2. Related Work
Algorithms such as the partitioning of spaces algorithm, the hyperbolic curves algorithm, the time difference of arrival (TDOA), and the Taylor-series are generally used for localization of sound sources. Localization of sound sources using the hyperbolic curves algorithm estimates the location of the intersection point (coordinate) by solving three simultaneous equations of hyperbolic curves from three traces of the sound sources collected by three microphones using three equations. An equation of hyperbolic curve is obtained using the distance estimated from the time difference between two different sensors at a sensor node. The 3-dimensional (3D) localization modeling based on the hyperbolic curves in the localization of sound sources was also developed for applications that require 3D localization.
Localization of sound sources using TDOA simply estimates the location by measuring the sensitive time delay among the microphones in a specific geographical area. Based on the TDOA, a specific application of localization of sound sources for estimating the position of speech sources in a real-room environment given limited computational resources is presented, including the theoretical foundations [3]. Localization of sound sources using the Taylor-series [4] enables a least-sum-squared-error solution to a set of simultaneous linearized algebraic equations. This method is an iterative scheme for solving the simultaneous set of algebraic position equations (generally nonlinear), starting with a rough initial guess and improving the guess at each step by determining the local linear least-sum-squared-error correction.
An overview of the measurement techniques in sensor network localization and the one-hop localization algorithms based on the technologies including detailed investigation on multihop connectivity-based and distance-based localization algorithms is presented in [5]. A new approach for localization in wireless sensor networks (WSNs) based on semisupervised Laplacian regularized least-squares algorithm is proposed in [6]. This considers two kinds of localization data (signal strength and pair-wise distance between nodes). In [7], the kernel function is introduced, and a method to range-free localization using nonlinear mapping in WSNs is proposed. The localization problem in the WSN is expressed to a kernelized regression problem, and it is solved by support vector regression (SVR) and multidimensional support vector regression (MSVR).
In [8], a survey of various active and passive localization techniques developed over the years such as received signal strength indicator (RSSI), time of arrival (TOA), TDOA, and angle of arrival (AOA) is presented. Most of the localization techniques in this paper are part of the active systems class and are tracked or mounted on objects for estimating the position. In [9], a hybrid system for real-time sound source localization by a microphone array is proposed. The main idea is using the TDOA estimation based on generalized cross correlation (GCC) in order to narrow down the search space of steered response power-phase transform (SRP-PHAT). In [10], it is noted that the SRP based sound source localization algorithms frequently fail to locate the sound source in adverse noise and reflection conditions when the direct paths to the microphones are unavailable. This paper proposes a localization algorithm based on discrimination of cross-correlation functions in order to solve this problem.
In [11], the localization techniques for localizing vehicles and examining how the techniques can be combined using Data Fusion techniques to provide the robust localization system in VANets are proposed. In [12], a sound source localization algorithm based on a sparse fast Fourier transform (FFT) based feature extraction method and spatial sparsity is proposed. In this paper, the sound source positions are represented to a sparse vector by discretely segmenting the space with a circular grid. In [13], it is indicated that the linear least-squares (LLS) technique and two-step weighted least squares (2WLS) both have the same measurement matrix that becomes ill-conditioned when the sensor geometry is a uniform circular array and the source is close to the array center. In addition to this, a new constrained weighted least-squares (CWLS) estimator is proposed to avoid this problem in this paper.
In [14], the fuzzy logic based localization system of sound sources using sound signal strength in underground parking lot is proposed, and the performance is analyzed for enhancing the stabilization and the accuracy of the localization algorithm. It is noted that the performance of this system is 4 times higher than that of general localization algorithms. In [15], the compensation algorithm for localization using the LSM in nonline of sight (NLOS) environment is also proposed and the performance of the algorithm is analyzed. In this paper, it is noted that the localization accuracy of the algorithm is higher than triangulation scheme as average 86.0% and the Kalman filter as average 16.0%, respectively. The experimental results in [15] are only under indoor and outdoor NLOS environment, and it has no considerations in undergrounded parking lots.
3. Proposed Localization of Sound Sources Algorithms
3.1. Localization Algorithm Based on Sound Sources Strengths
We design localization of sound sources algorithms for localization of sound sources in apartment complexes’ underground parking lots. There may be no need to detect the sound sources very accurately in the parking area, and the major objective for designing a localization of sound sources algorithm for underground parking lots is to have an algorithm that can detect the originating sound of incoming or outgoing cars among various sound sources in the parking lots so that the surveillance camera can be rotated to the direction of the incoming or outgoing cars especially in the blind spots without any difficulties.
The basic reason for localization of sound sources in parking lots is to easily detect the originating sound of incoming or outgoing cars without some complexities and difficulties in executing localization functions. In fact, various sound sources such as car moving, pedestrian walking, and some other sound sources related to objects moving frequently occur in parking lots. Especially, the sounds of incoming or outgoing cars loudly spread out in parking lots when the driver turns to the desired direction. The sounds are caused by the special painting on the ground of parking lots and are much louder than other sound sources. It is easy to detect the only sound source of car moving, even though other sound sources except the car moving sound occur at the same time.
The running environment of the proposed algorithm is basically assumed that moving cars are sequentially coming in or going out side by side through pathways in parking lots, though multiple cars arrive in the entrance of parking lots. The parking lots located on different floors in apartments are connected to each other through pathways. Thus, if the localization system detects sound source of a moving car, the camera instantly rotates to the estimated location on the pathway in the parking lot until the car moves away.
The proposed localization of sound sources can also be adapted and deployed at crossing points in parking lots, in which cars can move sequentially on one of inner road ways or simultaneously on multiple inner road ways in parking lots. In the first case of cars moving sequentially on one of the inner road ways, the detection of the sound source of the single moving car and the rotation of the camera to the estimated car location can be successfully executed. On the contrary, in the second case of cars moving simultaneously on multiple inner road ways, the detection of the sound sources of the multiple moving cars and the rotation of the camera to the estimated cars simultaneously cannot be easily achieved. It is difficult to detect all sound sources of the moving cars on multiple inner road ways in parking lots on time, because processing multiple sound sources for estimating moving car locations simultaneously requires more interpretation analysis, noise filtering, and additional computing loads. Thus, the running environment for the proposed algorithm in case of crossing points in parking lots is assumed to be only the first case (cars moving on sequentially), but not the second case (cars moving on simultaneously). However, the proposed algorithm can be adapted to the second case if cars moved sequentially on multiple inner road ways due to low traffic in parking lots.
In order to achieve the above objective, we have designed a localization of sound sources algorithm that has four processes: (1) measurement of the sound sources; (2) analysis of the sound sources strengths; (3) computation of the sound sources; and (4) location estimation of the sound sources, as shown in Figure 1 [14].

Processes of the proposed localization algorithm.
In the 1st process, measurement of the sound sources, the sound sources signals received from four microphones are detected and measured. The microphones equally spaced and arranged as a manner of cross sign (+) measure the sound sources from four directions of front, back, left, and right as shown in Figure 2. The process of measuring the sound sources is periodically executed in the algorithm, and the time period is set to 1 second.

Arrangement of four microphones.
In the 2nd process, analysis of the sound sources strengths, the values of sound strength more than threshold value (


In the 3rd process, computation of the sound sources, only the largest two count values (

In the 4th process, location estimation of the sound sources, the location (angle) of the sound sources can be estimated by (4) and (5), respectively. If

In order to adapt the proposed localization algorithm to the localization of sound sources system, the surveillance camera that can be rotated to the entire space should be prepared in the underground parking lots. The proposed algorithm can instantly rotate the surveillance camera to the estimated location irrespective of the blind spots. It is a challenge to guarantee the performance of the proposed algorithm is better than the required quality level.
3.2. Localization Compensation Algorithm Based on Least-Squares Method
Unfortunately, the proposed localization algorithm in Section 3.1 may not work satisfactorily in a real parking lots environment due to environmental problems such as voice interferences and various noises, even though the proposed localization algorithm is, to some extent, reliable in experimental tests. Thus, we have developed a localization compensation algorithm using the LSM to improve the accuracy of the location estimation of the localization algorithm.
First of all, we represent the pairs of the locations estimated by LOCss using (4) and (5) and the actual locations of the sound sources as

There may be errors in between

It is known that LSM is one of the most popular approximation methods for approximation of the first order equation, and it is widely used for compensation algorithms in various fields. So, in this paper, we adapt the LSM to the localization of sound sources compensation algorithm. The sum of the squares of errors

In order to minimize S for

Equations (9) can be simplified as follows:

With

From (11), we obtain

By plugging in
4. Experiments and Result Analysis
4.1. Experimental Environment
We have performed experiments with the proposed localization of sound sources system in the Information & Telecommunication Lecture Building at Tongmyong University and in the parking lots of Metro City apartment located in Busan City. In order to test the proposed algorithms, we have also developed the special embedded hardware based on Atmega 128 MCU named to “sound source receiving and analysis module” as shown in Figure 3.
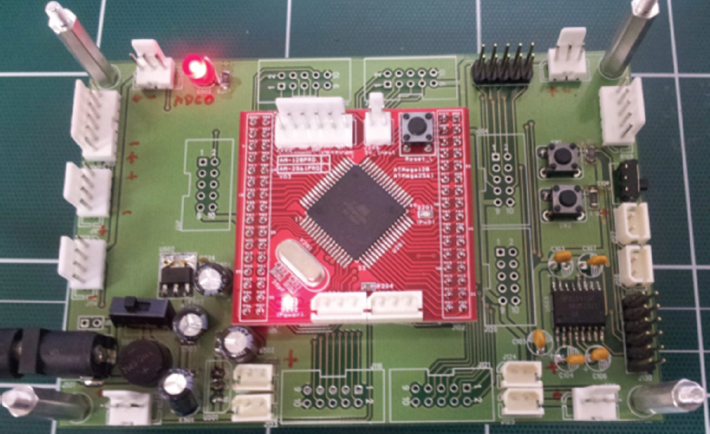
Sound source receiving and analysis module.
The performance tests of the proposed algorithms are tried several times after installing the module to top of about 1 m high tripod. In this experimental environment, the sound sources under the directions 135°, 180°, 270°, and 337.5° are generated and collected by the module. The collected sound sources are transmitted into the computing server, in which the proposed algorithms are executed. Thus, the information of the estimated location is sent to the monitoring system via the Internet. Figure 4 shows the performance test scene (left) and the result analysis scene (right) of the proposed algorithms in the parking lots of Metro City apartment, respectively.

Performance test and result analysis scenes of proposed algorithms.
In this paper, we have presented localization of sound sources in parking lots and analyzed the performance of the localization system using our localization algorithm and localization compensation algorithm based on the LSM in terms of the experimental metrics, the error reduction rates, and the estimated average angles of sound sources.
4.2. Result Analysis
In this section, we compare the performance of the proposed localization of sound sources algorithm integrated with the localization compensation algorithm based on the LSM
The estimated location (angles) of

Estimated directions in angle 135°.
The estimated locations of

Estimated locations in angle 180°.
The estimated locations of
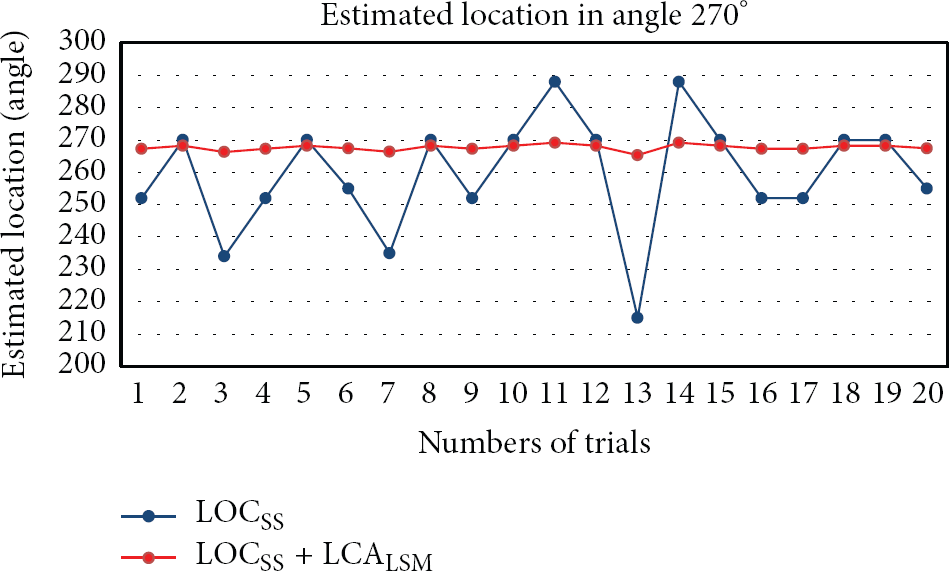
Estimated locations in angle 270°.
The estimated locations of

Estimated locations in Angle 337.5°.
The performance comparison between the proposed localization of sound sources algorithm
Estimated angle of sound sources and error reduction rates (maximum).

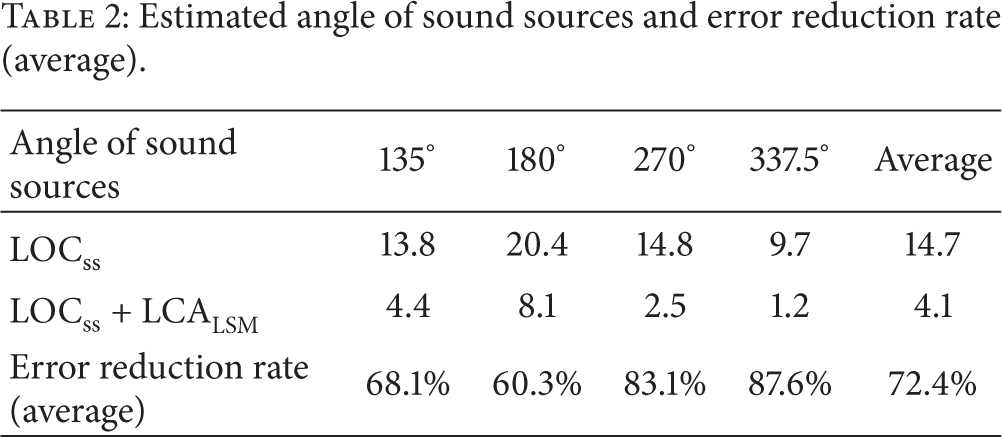
In addition, the performance in terms of the error reduction rates and the estimated average angles of sound sources in directions 135°, 180°, 270°, and 337.5° is summarized in Table 2 and Figure 9, respectively. The estimated average reduced error rate in the
Estimated angle of sound sources and error reduction rate (average).

Estimated average angle errors of sound sources.
These are only the results under the sequential incoming or outgoing of the moving cars on the pathway and at the crossing point on one of the multiple inner road ways in parking lots. The performance of the proposed algorithm under the running environment of the crossing point on multiple inner road ways will be presented in the future using some experiments.
In order to analyze more thoroughly the performance of the proposed localization of sound sources in parking lots by comparing it with other related studies, we have reviewed more researches on sound source based localization. But, most of them only study theoretical aspects of localization algorithms of sound sources. Thus, it is either meaningless to compare the proposed algorithm in our localization system with conventional theoretical results or impossible to compare accurately due to the difference of the running environments.
It is inferred that most of the theoretical algorithms in previous research are complex and difficult for adaptation for real parking lots. Therefore, comparison of the proposed algorithm with other algorithms in the same localization system is not presented in this paper.
5. Conclusions
In this paper, we have presented a localization of sound sources algorithm for identifying the direction of sound sources in underground parking lots as well as a location estimation correction algorithm based on the LSM. We have also presented the performance of the proposed
The proposed localization of sound sources algorithms is for the underground parking lots in apartments. The algorithms detect the sound sources caused by the moving cars among various sound sources in parking lots, and the estimated direction is used to rotate the surveillance camera to the direction of the moving car, especially in a blind spot.
The average reduction rate of the location estimation errors by
We strongly expect that the proposed algorithms can be used in any surveillance camera system for monitoring criminal activities in parking lots, especially the blind spots. The proposed algorithms contribute to commercialization of localization systems in home security and safety fields.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was supported by the MSIP (Ministry of Science, ICT & Future Planning), Korea, under the IT/SW Creative research program supervised by the NIPA (National IT Industry Promotion Agency) (NIPA-2013-H0502-13-1018).