
Abstract
In the last two decades, cable-driven parallel robots have attracted a lot of attention in robot community as a hot topic of robot research. In this paper, the development of the cable-driven parallel manipulator is first introduced in general. Second, the latest advance in theory and applications of cable-driven parallel manipulator is presented in detail, especially some notable implementations. Finally, an other probable application foresight with this cable manipulator is proposed and discussed.
1. Introduction
In comparison with rigid parallel manipulators, cable-driven parallel manipulators take cables as actuators instead of rigid links to control end-effector motion. According to the literature, cable robots maintain some desirable characteristics, including potential large workspace, being easy to reconfigure and implement, high speed motion, and high payload to weight ratio. Due to these features, some applications are available such as in astronomical observation [1, 2], structure building device [3], rescue [4, 5], service or rehabilitation [6, 7], and multiple aerial robots [8, 9]. However, the cable robot also has some peculiar drawbacks. The most general one is that the cable can only be in tension; that is, cables should be kept taut to produce wrench on the end-effector [10]. Besides, the flexibility of cable should be considered in suspended cable parallel robots [11, 12].
From the theoretical research about cable-driven parallel robot, Landsberger [13] presented the modeling, design, and motion issues of this cable robot in his paper. Ming and Higuich [14] classified the cable robot into two categories based on the cable number and the degree of freedom of end-effector, namely, CRPM, and IRPM mechanisms. Verhoeven [15] further introduced three categories to illustrate the cable robots, which are IRPM, CRPM and RRPM.
In this robot application aspect, NIST (National Institute of Standards and Technology) developed the ROBOCRANE two decades ago [16], which is considered as the first cable-driven parallel robot. Then, Japan, France, and Germany implemented several different cable parallel robots, respectively [17–19]. One of the most crucial applications is to build receiving platform for large span radio telescopes, such as American Arecibo project, Chinese FAST project, and Canadian Lambert telescope [20–22]. In addition, cable-driven parallel robots have also been used in assembly, rehabilitation, and position calibration areas [7, 23–25].
In the next section, we will review the theoretical research and application of cable-driven parallel manipulators, respectively.
2. Theoretical Research on Cable-Driven Parallel Manipulator
2.1. Modeling, Design, and Analysis
In the literature, cable-driven parallel robots are classified into two: suspended ones and redundantly constrained ones. As for the suspended cable robots, the gravity is necessary to serve as the constant external force to control the end-effector's degrees of freedom, while the redundantly constrained cable robots can control all the motions by cable forces only.
In the kinematic modeling of the cable-driven parallel robots, there are different models to illustrate the cable profile, including straight line model [26–30], parabolic model, and catenary model [31]. Generally, the straight line model is sufficient for most redundantly constrained robots. However, it is more feasible to apply parabolic or more precisely catenary model to work on the kinematic modeling. The literature [32, 33] specifically describes the difference of the workspace by parabolic or catenary model compared with straight line model.
With the unidirectional driving property of cables, the static equilibrium or dynamic equilibrium should be added to analyze cable robot workspace. There exist many methods to define the static workspace in [27, 32–34] and the characteristics are illustrated in detail about the static workspace poses [35]. Other researchers focus on the dynamic workspace to solve the dynamic trajectory planning problem [36–38]. The results show that the mass points can move beyond the static workspace and there is some special natural frequency like pendulum mechanisms.
Tension distribution is another issue when considering redundant cable robots. In [33, 39, 40], the authors, respectively, take advantage of convex method, variant of bland's pivot rule, and gradient projection to obtain the tension distribution. In the meanwhile, [41, 42] address the same problem by using minimization of the Euclidean norm of the cable tensions and p-norm of the relative cable tensions to avoid the discontinuity of the cable tension in a continuous trajectory with linear-program formulation.
Regarding workspace evaluation issue, Hay proposed a definition called dexterous workspace of cable-driven robot, which refers to the intersection of orientation workspaces with a range of rotation angles [43]. Besides, stiffness is an important index to measure the stability of the cable robots [44]. Recent research shows that stiffness and tension may be considered in a whole to evaluate the workspace quality for 3-Dof planar cable robot [45]. In addition, [26] gives an example to illustrate that the condition number may be infeasible to depict the workspace quality.
2.2. Control Research
Many control schemes which are developed for serial or parallel robots may be adapted for cable-driven parallel manipulators. The most common one is to control the cable length: a feedback control in the cable length is used for coordination to realize the desired cable length corresponding to a desired position of an end-effector. Motion convergence using PD feedback control in cable length coordinates was proven with a Lyapunov function and Vector Closure by Kawamura et al. [17]. Fang et al. [46] proposed nonlinear feedforward control laws in cable length coordinates and the optimal tension distribution was considered to the advantage of the control laws. Williams et al. [47] proposed a computed torque controller using the encoder feedback for each cable length. In cable length control, measure of Cartesian position is avoided. However, it has difficulty in accomplishing accurate pose of the end-effector due notably to cable elongations. Visual servoing is a good alternative since it closes the control loop over the vision sensor. External sensing of the end-effector pose in the feedback signal replaces advantageously the forward kinematic model. Dallej et al. [48] proposed a 3D pose visual servoing and developed a vision-based computed torque control.
Cables have one unique property: they carry loads in tension but not in compression. This feature makes control of cable-suspended robots a lot more challenging than their counterpart parallel-actuated robots. Several control strategies were proposed by researchers to meet the input constraints of positive cable tensions. Alp and Agrawal [49] described the structures of Lyapunov based controller and feedback linearizing controller that assure positive cable tensions. Oh and Agrawal [50, 51] proposed techniques to estimate the admissible workspace of set-point control for a cable-suspended robot under disturbances and input constraints based on a sliding mode controller and a reference Goernor-based controller. Alikhani and Vali [52] proposed a propagation algorithm in order to generate feasible set points for the end-effector motion while satisfying the inevitable constraint on control input. Khosravi and Taghirad [53] formulated a robust PID position control in task space and used a corrective term to ensure that all the cables remain in tension.
The kinematically parallel suspension of a platform by a system of cables is kinematically indeterminate if the platform is movable while the cable lengths are kept constant. The kinematically indeterminate cable suspension manipulator cannot be controlled like the rigid manipulator just by kinematic control or computed torque control, since its position is not uniquely determined by the robot coordinates at the trolleys and winches. A trajectory tracking control consisting of a flatness-based nonlinear feedforward control and a superimposed linear feedback control concerning sway motions of the payload platform was presented by Woernle and Heyden [54, 55].
3. Application Research on Cable-Driven Parallel Manipulator
3.1. ROBOCARNE
As shown in Figures 1 and 2, NIST implemented ROBOCRANE to carry on a series of application research on assembly, lifting, spraying, and building in this experiment with the cable robot. Also, NIST worked on some theoretical analysis of kinematic modeling, stiffness, and workspace issues for the cable robot. The results concluded that the stiffness of this robot depends on cable stiffness, the position of end-effector, and the mass of the lifting load [16, 23, 56–60].

ROBOCRANE.

ROBOCRANE.
3.2. FALCON-7 and WARP
FALCON project and the development of virtual training system WARP are implemented in Japan with cable-driven parallel robots as a super-velocity robot, as depicted in Figures 3 and 4. They gave the systematical demonstration of a necessary condition that cable-driven parallel manipulators with n degrees of freedom need at least n + 1 cables to completely control motion. Furthermore, a 7-cable 6 DOFs cable-driven parallel manipulator was analyzed in their case study concerning modeling method and workspace calculation. It is also worth noting that the dynamic performance can be improved by increasing tensions based on the relationship of stiffness and tension in this kind of cable robot and it is verified in the experiments [17, 61, 62].

FALCON-7.

WARP.
3.3. SACSO Wind-Tunnel Model
SCASO was developed as another application of cable-driven parallel manipulators by ONERA, France, which is a 9-cable parallel robot shown in Figures 5 and 6. In this study, the types and functionality of cable-driven parallel robots are discussed and a kinematic analysis method is proposed for redundantly constrained cable-driven parallel manipulator as well. Besides, investigations regarding tension and dynamic characteristics are also taken in [18, 24, 63, 64]. Zheng [65] has done some similar research of cable-driven parallel manipulators.

SACSO Wind Tunnel.

9-cable-driven parallel manipulator.
3.4. SEGESTA Experimental Platform
Some researchers in Duisburg-Essen University of Germany built SEGESTA, a cable robot shown in Figure 7. Verhoeven, Hiller, Pott, and Brunkmann used it to study the kinematic modeling, workspace calculation method, instant tension distribution, and trajectory planning issues [19, 25, 66].

SEGESTA experimental platform.
3.5. Radio Telescope Application
3.5.1. Arecibo Observatory
The Arecibo Observatory is the world's largest single-aperture telescope for now. The main collecting dish of the Arecibo is 305 meters in diameter, constructed inside the depression left by a karstsinkhole. As shown in Figure 8, the support system of the receiver is composed of the cable structure and the track. In other words, the cable structure is only for static support without motion. A 900-ton platform is suspended statically 150 m above the dish by 18 cables, running from three reinforced towers. A 93-meter-long rotating bow-shaped track is attached below the platform, carrying the receiver [20].

Arecibo radio telescope.
3.5.2. The Canadian Large Adaptive Reflector
The Large Adaptive Reflector (LAR) is a concept for the Square Kilometre Array (SKA) project being developed in Canada. The aim is to design a low-cost, large diameter radio wave reflector. The LAR design is applicable to large radio telescope. The conceptual image of a complete 200-meter diameter LAR installation is shown in Figure 9. This telescope is composed of a parabolic reflector and a feed support system. The feed support system including two cable-driven parallel manipulators lifted with a helium filled balloon [22, 67].

LAR telescope.
3.5.3. The FAST Project
The 500-meter Aperture Spherical radio Telescope (FAST), which is under construction now in the Karst region of Guizhou Province, China, will be the largest single dish radio telescope in the world. As shown in Figure 10, the FAST is composed of the active main reflector and the feed support system. Receivers are located in the feed cabin. The huge cable-driven parallel manipulator and the feed cabin constitute the feed support system. The cable-driven parallel manipulator with the radius of 600 m is driven with six steel cables, providing receivers with large workspace. As a result, comprehensive performance of the FAST will be improved tenfold approximately, compared with the famous Arecibo telescope whose feed cabin is hanged in the air with static cables [1].

The FAST project.
To verify the feasibility of the new design, as shown in Figure 11, a 1: 15 scale model (the tower is uniformly distributed in a 40 m diameter circle) of FSS was built in 2009 [2, 68–71], which is designed and constructed according to the theory of similarity. The end-effector is required to trace a real astronomy locus with position precision of RMS 2 mm at the minimal tracking velocity of 3 mm/s. Duan in Xidian University studies the scale model of cable parallel robot as well [72, 73].

40-meter similarity model of FAST (1: 15 scale).
3.6. Upper Arm Rehabilitation Robot
The research of the rehabilitation robot began in the 1980s. The United States, England, and Canada are always in the leading position of this area. With the development of computer, sensor, and control technology, the research enters the rapid development stage from the 1990s [74].
According to the support method, the rehabilitation robot can be subdivided into two categories, namely, exoskeleton and traction. Lately, the cable-driven parallel manipulator has been adopted as the rehabilitation robot with obvious advantages, such as good force sensitivity, low power consumption, being easy to install and adjust, and having good suppleness [75]. The cable-driven parallel manipulator introduces new opportunities for the development of the rehabilitation robot. Professor Gallina firstly used planar cable-driven parallel manipulators as traction-type upper arm rehabilitation robots [7, 76]. Further, two cable-driven rehabilitation robots are developed based on the spatial cable-driven parallel manipulator [77], as shown in Figure 12.
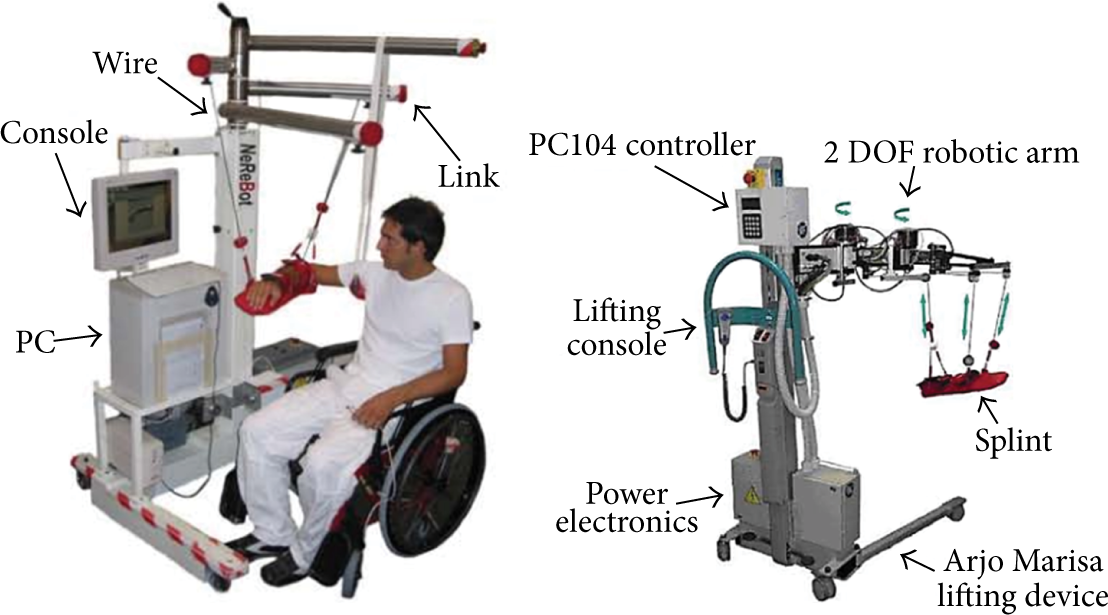
Traction-type cable-driven upper arm rehabilitation robots.
Yang proposed the cable-driven exoskeletal rehabilitation robot firstly, in view of the cable-driven parallel manipulator [78]. Then, Agrawal designed cable-driven exoskeletal rehabilitation robots with four DOFs and five DOFs, respectively (as shown in Figure 13), and carried out the optimum design research works [79].

Cable-driven exoskeletal rehabilitation robots ((a) 4-DOF; (b) 5-DOF).
3.7. Camera Robot
Cable-driven parallel manipulators can serve as the end-effector of camera robot, which offer a valuable solution for area view over the sky. For example, as shown in Figures 14 and 15, they are well known as the camera robots, including Spidercam in Germany [80] and Skycam in USA [81], which can realize the camera function at different angle and position.

Spidercam.

Skycam.
3.8. Low Gravity Application
Another application of cable parallel robots is motion simulation in low gravity condition, which is mainly used in aerospace engineering, especially in simulation of docking, launch, and landing process. Some researchers in the former Soviet Union employed 3-level hinge to hang on the cables in order to assure 5 DOFs motion, where another DOF is realized by follow-up mechanism. The whole system can be used to simulate space motion with 6 DOFs in low gravity situation. The most representative simulation system was built in 1964 by Langley research center in the United States [82], as shown in Figure 16, which was used for docking simulation of Gemini-Agena.

Physical docking simulation with cable robot.
4. Conclusion
Cable-driven parallel robots have been extensively developed and applied in many domains so far. Some fundamental issues like workspace calculation have been solved by many different methods. However, it is also worth noting that this type of robot can be employed in other potential areas, such as airplane part assembly with large span requirement, giant ship assembly, precision docking assembly, and rocket launch simulation. Therefore, the cable-driven parallel manipulator will attract more attention from researchers in different domains and obtain more applications by corresponding companies.
Conflict of Interests
The author declares that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This research is sponsored by the National Natural Science Foundation of China (nos. 11178012 and 51205224).