
Abstract
For large scale systems, as a hierarchical multilevel decomposed design optimization method, analytical target cascading coordinates the inconsistency between the assigned targets and response in each level by a weighted-sum formulation. To avoid the problems associated with the weighting coefficients, single objective functions in the hierarchical design optimization are formulated by a bounded target cascading method in this paper. In the BTC method, a single objective optimization problem is formulated in the system level, and two kinds of coordination constraints are added: one is bound constraint for the design points based on the response from each subsystem level and the other is linear equality constraint for the common variables based on their sensitivities with respect to each subsystem. In each subsystem level, the deviation with target for design point is minimized in the objective function, and the common variables are constrained by target bounds. Therefore, in the BTC method, the targets are coordinated based on the optimization iteration information in the hierarchical design problem and the performance of the subsystems, and BTC method will converge to the global optimum efficiently. Finally, comparisons of the results from BTC method and the weighted-sum analytical target cascading method are presented and discussed.
1. Introduction
The multidisciplinary design optimization (MDO) problems have become very important in most engineering designs. The key issue for MDO problems is how to coordinate coupling disciplines, and various MDO frameworks have been developed based on their problem formulations and decomposition strategies. Martins and Lambe [1] provided a general introduction for the various developed approaches and summarized the merit of different MDO frameworks. Tosserams et al. [2] discussed the general characteristics of nested formulations and alternated formulations for MDO problems. Originally, the MDO problem minimizes the cost function subject to multiple disciplinary constraints but it may be unpractical to solve the entire problem in one optimization formulation; bilevel optimization formulations have received considerable attention to solve MDO problems, such as collaborative optimization (CO), which has been widely applied to the design of aerospace systems, and the analytical and computational aspects of CO were presented [3]. For large scale engineering problems, as a method to propagate system targets and coordinate common variables of subsystems through a hierarchical multilevel system formulation, analytical target cascading (ATC) method [4–6] has been developed and widely utilized to solve multidisciplinary engineering problems [7–10]. In the ATC method, the all-in-one (AIO) optimization formulation is decomposed into a hierarchical structure with one system level and multiple subsystems. In order to find the optimal solution of the original MDO problem, it is essential to minimize the cost function and reduce the inconsistency between the subsystems simultaneously in ATC.
The cumulative constraint violations in the subsystems, also known as the discrepancy functions, were firstly formulated and minimized to maintain the consistency in the MDO problems [11]. Besides, the differences between the subsystem variables have been considered as the discrepancy functions [12, 13]. The discrepancy functions were then penalized in the objective functions for finding the optimal solution and diminishing the inconsistency during the optimization processes [14, 15]. The ATC method firstly considered the weighted discrepancy functions of design variables in multiobjective formulations and chose weighting coefficients to coordinate the optimal solutions of the original MDO problems [16–19].
In the processes of solving the Analytical Target Cascading, the system level assigned its optimal solution to the subsystems as the design target points. In the subsystems, the optimal solutions were found in terms of minimizing the differences between the subsystem variables and the targets subject to the local constraints. The local optimal solutions were then updated back to the system level as the design responses. The weighted discrepancy functions in terms of the targets and the response points were diminished during the optimization processes of ATC. However, the selection of the weighting coefficients is crucial for decreasing the discrepancy functions to zero and coordinating the inconsistency between design points and assigned targets in each level during the optimization processes. In other words, the proper optimal solutions can only be obtained with an appropriate choice of weighting coefficients. Many approaches have been studied to determine the proper selection of weights [18–22]. Michalek and Papalambros [18] proposed a weights updating method using the KKT first order necessary conditions combined user-specified inconsistency tolerances. Tosserams et al. [20] developed an augmented Lagrangian coordination method with the alternating direction method of multipliers. Kim et al. [21] formulated a Lagrangian dual coordination method to update the weighting coefficients. Li et al. [22] provided a diagonal quadratic approximation method by linearizing the cross terms of the discrepancy functions. The above methods took the discrepancy functions as equality constraints and used different penalty terms to coordinate those equality constraints. The convergence rate of these methods becomes more slowly as the discrepancy becoming smaller, and the penalty terms might lead to oscillate during the iteration process.
In this paper, single objective functions in the hierarchical design optimization are formulated to avoid the problems associated with the weighting coefficients by a new bounded target cascading (BTC) method. Instead of assigning the point targets to the subsystems in ATC, the bounded targets are introduced in the new method. The target bounds are obtained from the optimal solutions in each level and utilized to reduce the variable bounds during the optimization processes. Furthermore, the bounds of responses are also determined to avoid the weighted discrepancy functions of the responses. If the common variables exist, they are coordinated based on their sensitivities with respect to design variables. With the aids of the target bounds, the optimal solutions can be determined in the reduced variable bounds while the consistency between the variables and the targets is maintained.
In the next section, the well-known MDO algorithm and the analytical target cascading method are firstly reviewed. In Section 3, the bounded target cascading method is proposed to solve MDO problems to avoid the problems associated with the weighting coefficients. Lastly, some numerical examples are solved by the BTC method and the comparisons of the results from the proposed method and the ATC method are also presented and discussed in Section 4.
2. MDO and Analytical Target Cascading
The original formulation of the MDO problem is given by

where f is the cost function;
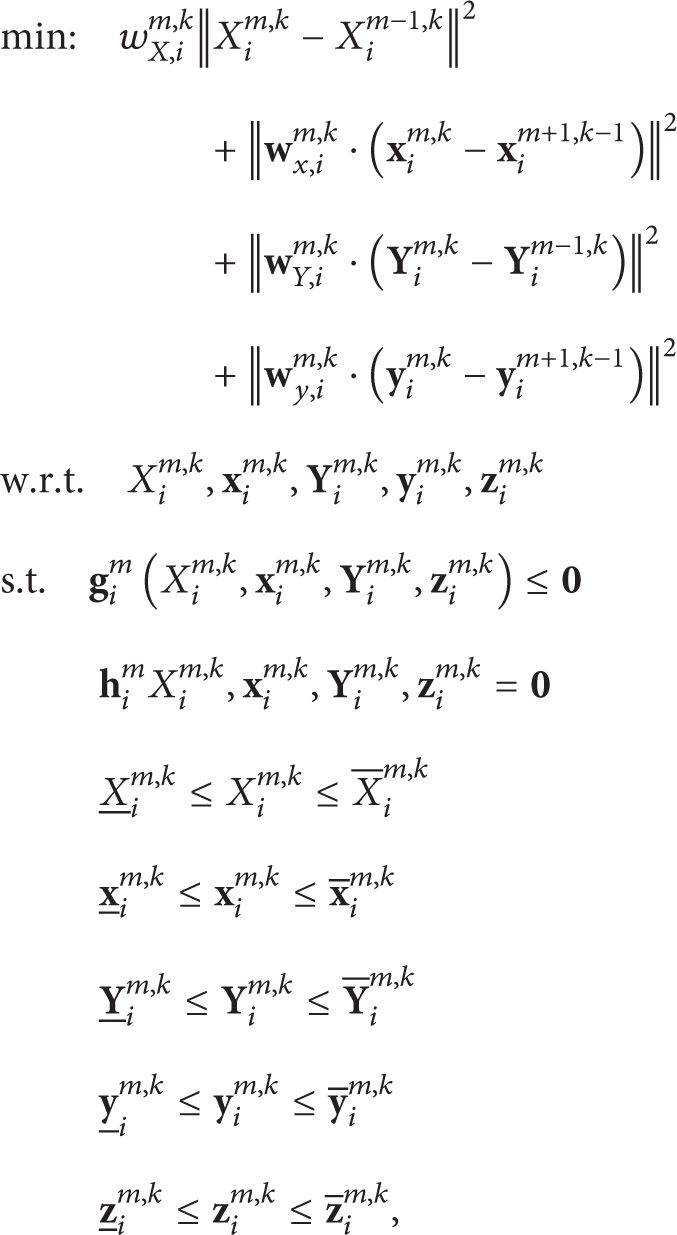
Kim et al. [4] developed analytical target cascading (ATC) method to decompose the MDO problem into hierarchical structures with a system level and several subsystems. The system level is given as

where
where w
X,i
m,k
,
The discrepancy functions can be formulated by either the L2-norm differences [4] between the variables and target points or the squared L2-norm functions [6]. However, the multiobjective formulations are very difficult for ATC to find the proper solutions in the MDO problems. Some researchers [16, 17] recognized the importance of the weighting coefficients in the discrepancy functions for finding the optimal solutions and diminishing the inconsistency simultaneously. Kim et al. [21] noticed that the proper selection of weighting coefficients is crucial for obtaining the reasonable optimal solutions in ATC. There are two approaches to resolving the problems associated with the weighting coefficients: one is to find the proper choice of weights and the other is not to use the weighted terms in the multiobjective formulations. Many researches have been conducted to appropriately determine the weighting coefficients, and the design problem will converge to different Pareto solution with different weighting coefficients. BTC tries to formulate the target cascading problem into a single objective design framework, and the optimization iteration information in each design level is shared to make the design points converge to the global optimum.
3. Bounded Target Cascading
In this Section, a new bounded target cascading (BTC) method is proposed to solve the MDO problem in (1) without using the weighted multiobjective formulations. Instead of assigning the point targets to the subsystems in ATC, the bounded targets are introduced in the new method. The target and response bounds are defined to avoid the weighted discrepancy formulations. Furthermore, the common variables are coordinated based on sensitivity analysis.
3.1. Target Bounds in BTC for Subsystem
In the bounded target cascading method, target bounds for the common variables in the ith subsystem are defined as

which are centered at the target points Y
i,j
m − 1,k and ranged by d
i,j
m,k
. Instead of using the weighted term of

where Y i,j m,k − 1 denotes the previous optimal solution and Y i,j m − 1,k stands for the target in the kth iteration.
In the coordination processes, if the discrepancy between design target and design point for any subsystem is less than one percent of the design response, the target bounds for common variables will be redefined using the bounds of the subsystem, which is calculated by

The design optimization problem in subsystem is to minimize the deviations of subsystem performances and common variables from assigned targets. The design problem in subsystem converges with the two deviations are small enough.
3.2. Target Bounds in BTC for System
In system level, the weighted discrepancy function of the design responses is replaced by the new response bound which is defined as

where
If the common variables of the responses exist and then constrained by their sensitivity relations with the design variables. Therefore, approximated linear equations are established by the first-order Taylor expansion, which is given by

If there are c j common variables in subsystem i, the updating information for common variables with the ith subsystem is provided in system by

In system level, for coordinating common variables between subsystem i and subsystem j, the target for common variable will be calculated based on the updating information and the sensitivity of system objective function to the subsystem performance, which is given by

Therefore, in BTC method, instead of considering the weighted discrepancy term of
3.3. Solution Process
The optimization process using the proposed bounded target cascading method follows the divide-and-conquer strategy. The system level minimizes the cost function subject to the system-level constraints, the new response bounds, and the sensitivity relations of common variables, which is given by

The target bounds are then formulated based on the optimal solution and assigned to the subsystems. In general, the subsystem finds the local optimal solution subject to subsystem constraints and new target bounds:
The local optimal solutions are then updated back to the system level as the information of the response bounds. For the subsystems at the bottom of the hierarchy structure, (12) is simplified as

The iteration process of BTC method continues until the convergence criterion is satisfied. In this paper, the convergence criterion is defined by the absolute difference between the current and the previous design points to be smaller than the acceptable limit. In the next Section, some numerical examples solved by the proposed BTC method and the ATC method with various settings of the weighting coefficients are presented and discussed.
3.4. Convergence of BTC
The convergence properties of ATC have been discussed by [16], which proved that ATC process converges to the optimal point that satisfies the necessary optimality conditions of the original design problem. BTC solves decomposed MDO problems using the same coordinate principle with ATC in the targets cascading process, that is, hierarchical overlapping coordination, which is achieved by the exchange of information between different decompositions. The properties of BTC are presented as the following.
3.4.1. The Upper or Lower Bound for Design Point in System Level
In the system level for general ATC, the consistency constraints c
i
m,k
= ∥
3.4.2. The Linear Approximation for Coordinating Common Variable in System Level
The sensitivity of each subsystem to common variables is calculated to coordinate common variable between subsystems in the system level. The gradient calculation is the key issue to guarantee the accuracy of this approximation. In this paper, pseudo finite difference Δ
Suppose the equality relation between the design variable, xsub,i, and a common variable, ysub,ij, exist:

The partial derivative of the equality constraint with respect to common variables is

where xsub,isub,k and ysub,ijsub,k are the design points at kth iteration, and the sensitivity relation between the design variable and common variable is derived as

If the equality relation is not available, surrogate models will be formulated by simulation, and for high dimensionality engineering problem, the efficiency of simulation is the most considerable problem.
3.4.3. Interval Convergence for Common Variables in Subsystems
During the optimization iteration in subsystems, the deviation between targets and response should be decreased:
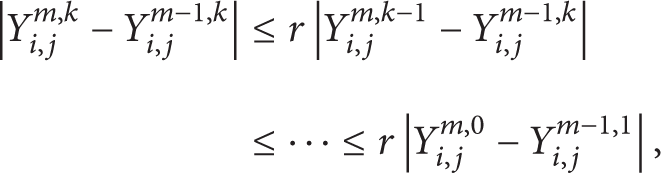
where 0 ≤ r ≤ 1, in this paper, r = 1. The convergence property of subsystem will change with different r.
4. Numerical Examples
In this Section, two mathematical problems are decomposed into hierarchical structures and solved by the proposed bounded target cascading method and the analytical target cascading method with various settings of the weighting coefficients.
4.1. Convex Quadratic Programming Problem
The undecomposed convex minimization problem is stated as in
Using the analytical target cascading method, the convex problem is decomposed into the structure with two levels, constraints g1 and h1 in subsystem 1 and constraints g2 and h2 in subsystem 2. For general ATC, The system level is formulated as (19), while the first and the second subsystems are given by (20) and (21), respectively:



where
In the proposed bounded target cascading method, the discrepancy terms of common variables are displaced by the sensitivity relations in the subsystems while the ones of design variables are displaced by the response bounds. Therefore, the system level is

In the first iteration, the sensitivity relations are omitted because no common variations have been made in

while the common variable is constrained by a target bound centered at the x5k,sys and ranged by the difference between the current target points and the previous optimal solution. When the current target point agrees with the previous optimal solution, the difference term dsub,i equals zero, and the common variable will be located at the target point x3k,sys.
In the proposed BTC method, the weighted discrepancy terms in the multiobjective formulations have been avoided and displaced by the bounds associated with the targets and responses. The optimization process follows the divide-and-conquer strategy while target bounds are assigned to the subsystems, and the response bounds are updated back to the system level. The iteration stops when the termination criterion, the absolute difference between
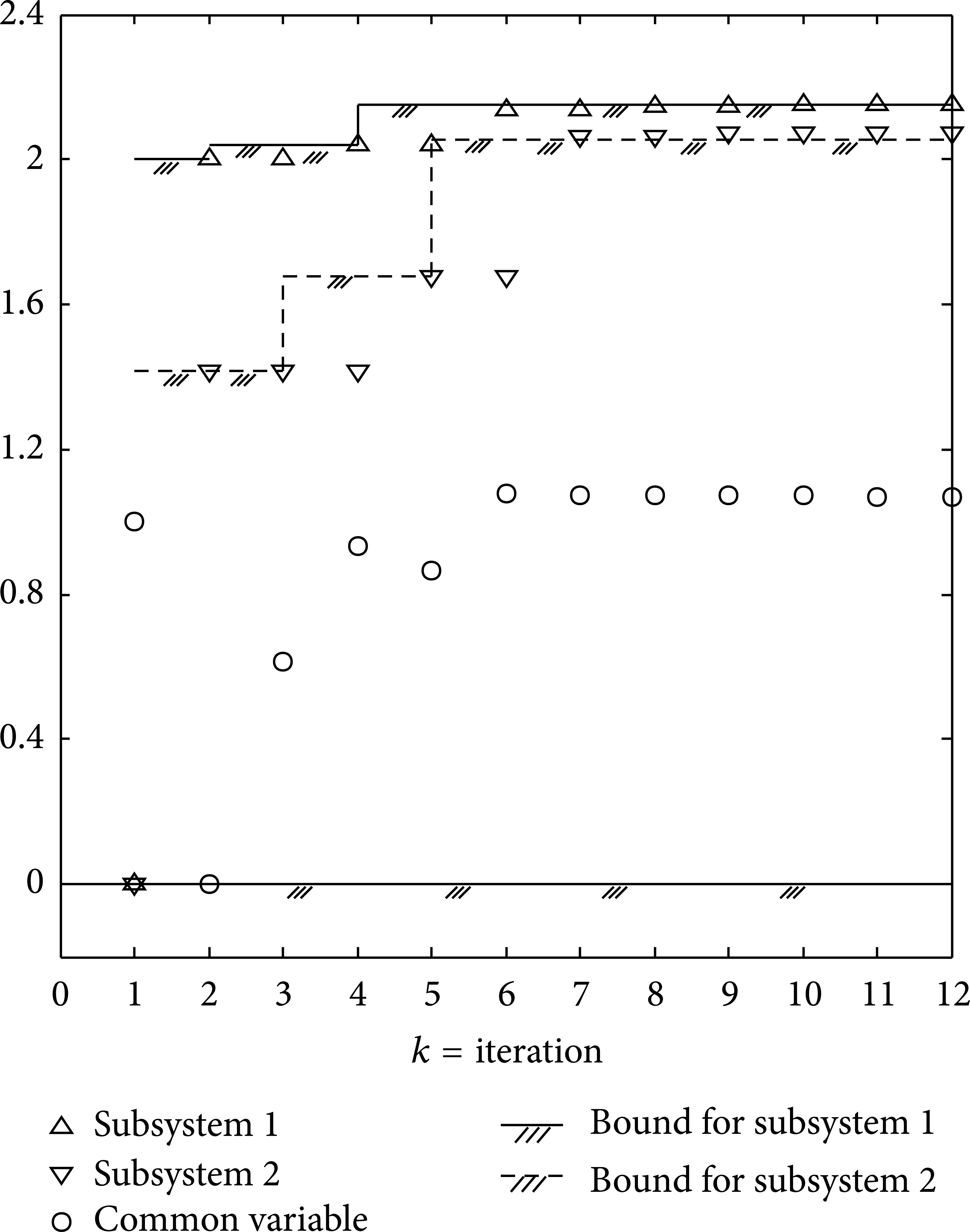
System-level iteration process of solving example 1 by BTC.

Iteration processes of solving example 1 by BTC in the (a) first and (b) second subsystems.
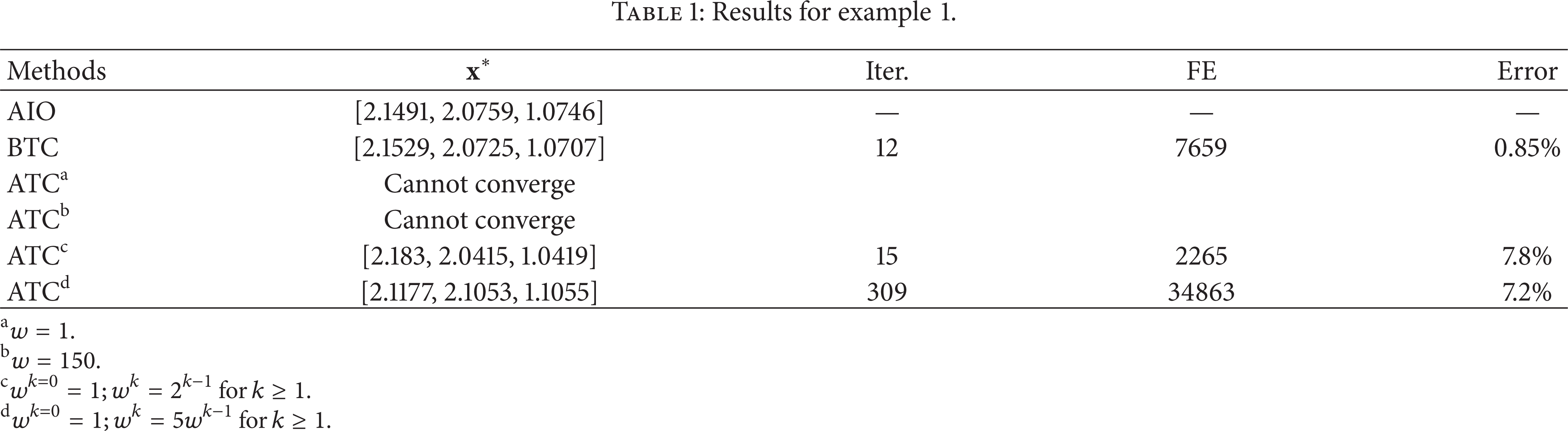
Moreover, the problem has been solved by the ATC using various settings of weighting coefficients. Two constant weights w = 1 or 150 and two increasing weights, wk = 0 = 1; w k = 2wk − 1 or 5wk − 1 for k ≥ 1 are considered. Table 1 lists the results with the starting point of [3 2.2 1] T . BTC uses only 12 iterations (Iter.) and 7569 function evaluations (FE) to find the reasonable solutions while ATC requires more to converge. The accuracy of the solutions is evaluated by the absolute difference with the results by all-in-one (AIO) methods, denoted as Error. The results show the BTC has 0.85% Error but the ATC produces Errors with more than 7%.
Results for example 1.
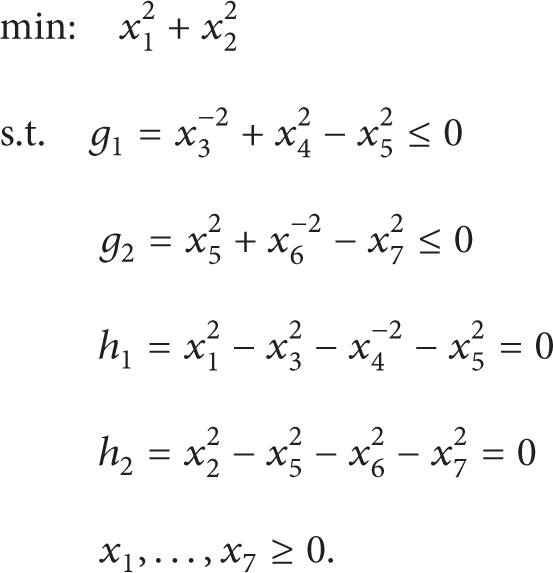
4.2. Nonconvex Geometric Programming Problem
The second example is a nonconvex geometric problem, which was used in [5, 18, 19, 21, 22], and the original programming problem is shown in (24).

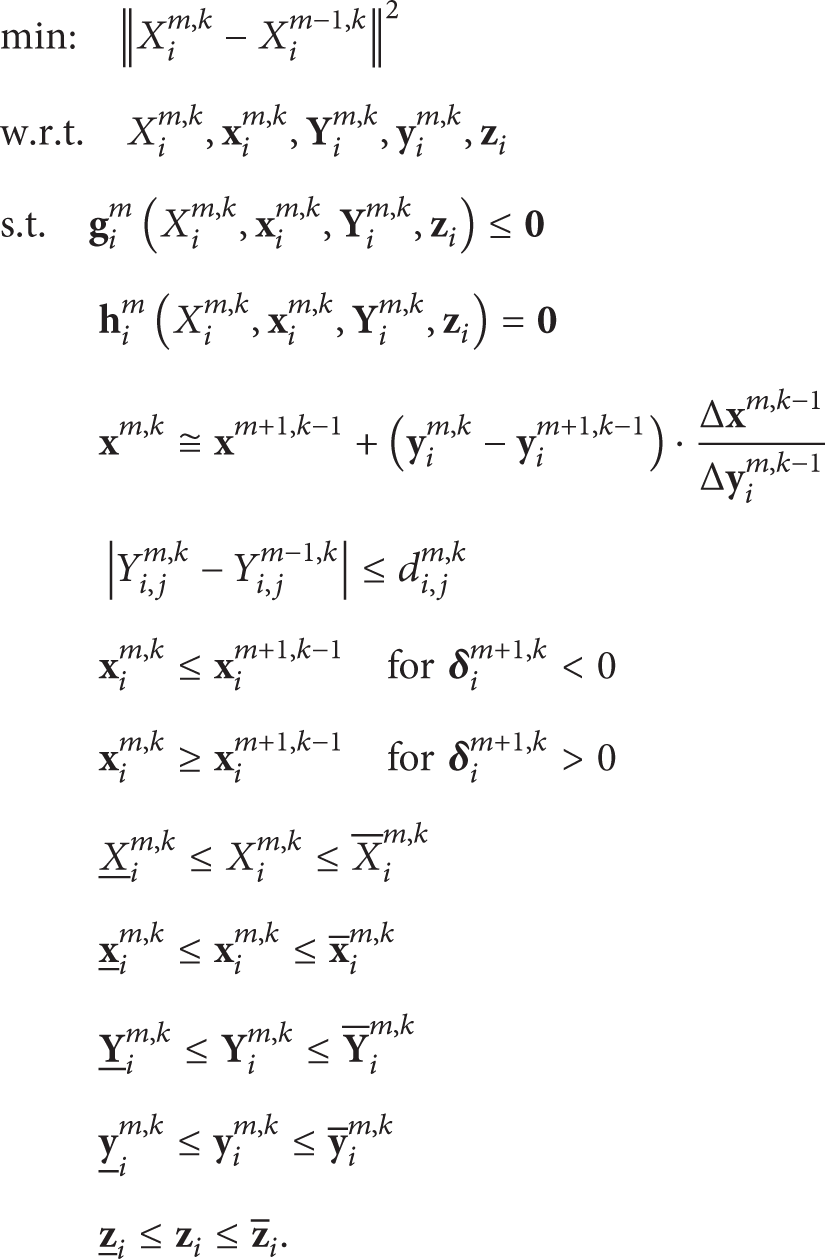
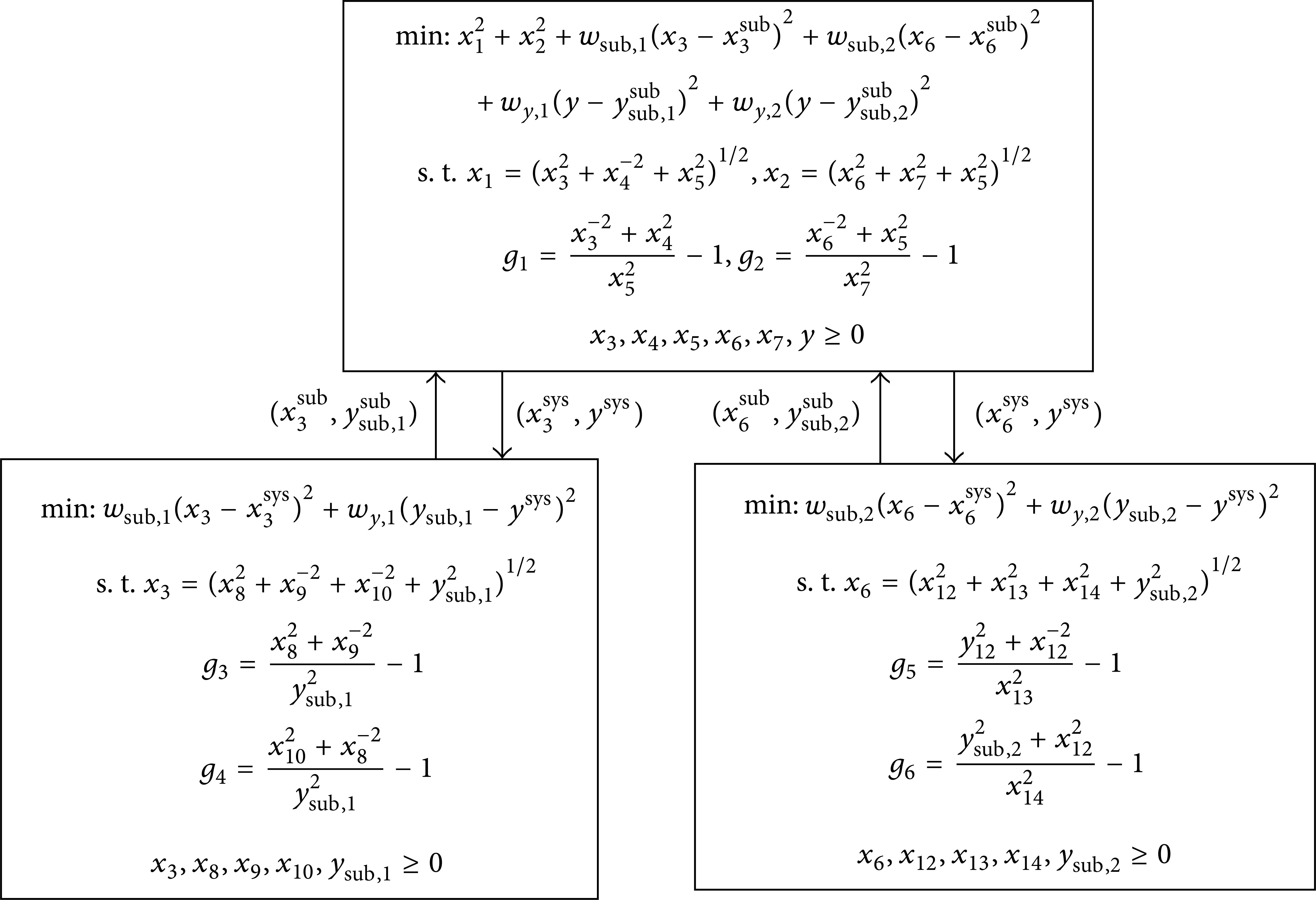
The geometric problem is decomposed into the structure two levels, with constraints g1, g2, h1, and h2 in the system level, constraints g3, g4, and h3 in subsystem 1, and constraints g5, g6, and h4 in subsystem 2. The formulations for system level and subsystem level of the decomposed design problem in general ATC method and the proposed BTC method are provided in Figures 3 and 4.
Design problem in general ATC method.

Design problem in BTC method.
The BTC method converges with 15 iterations and 7632 function evaluations. The optimal solution and comparisons with other methods are shown in Table 2. Figure 5 presents the iteration process of solving the problem using the proposed BTC in the system level. On the other hand, Figure 6 demonstrates the iteration processes in the subsystems using the BTC. Similarly, the optimal common variables are found inside the target bounds, illustrated by the solid lines.
Results for example 2.

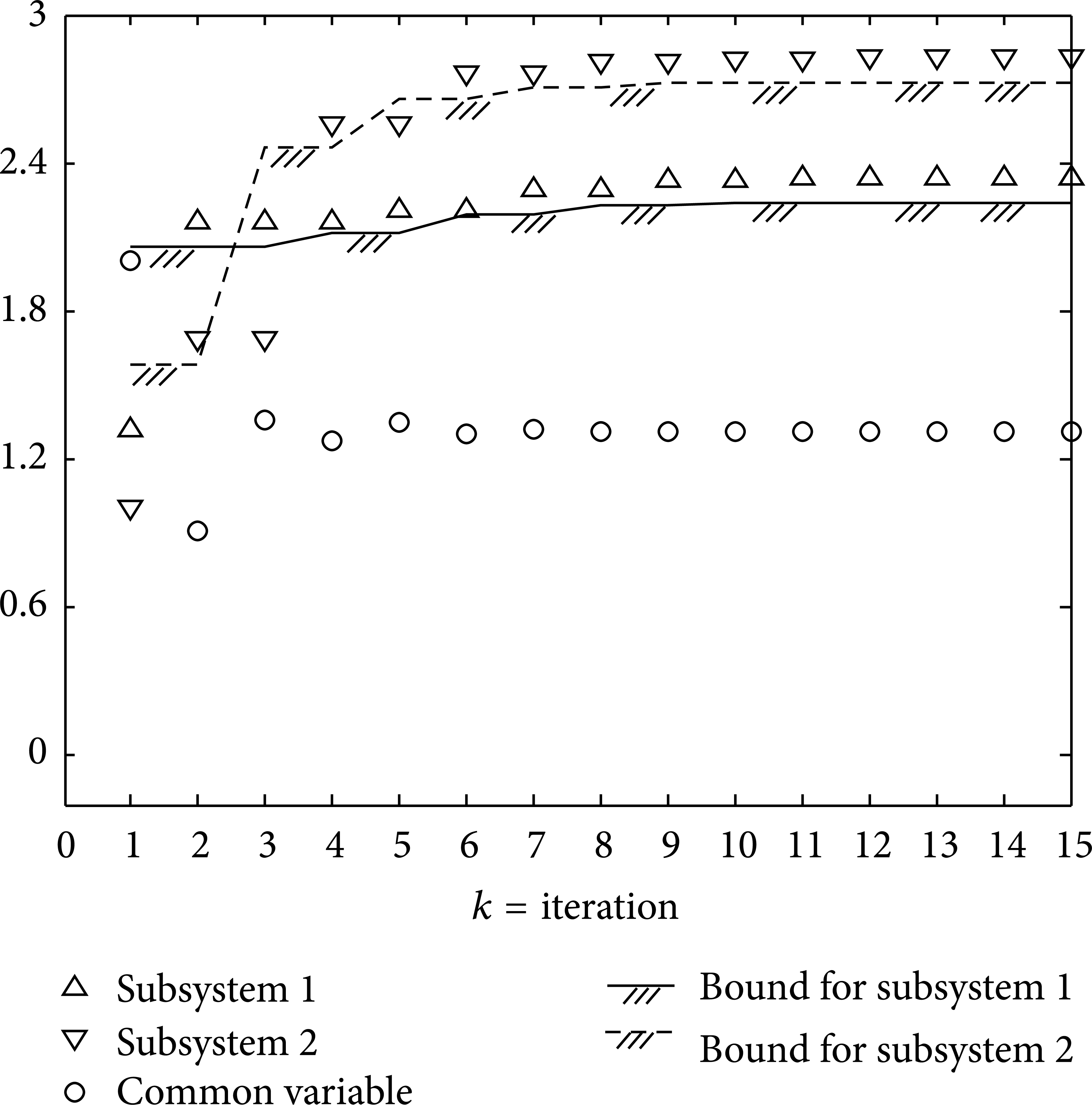
System-level iteration process of solving example 2 by BTC.
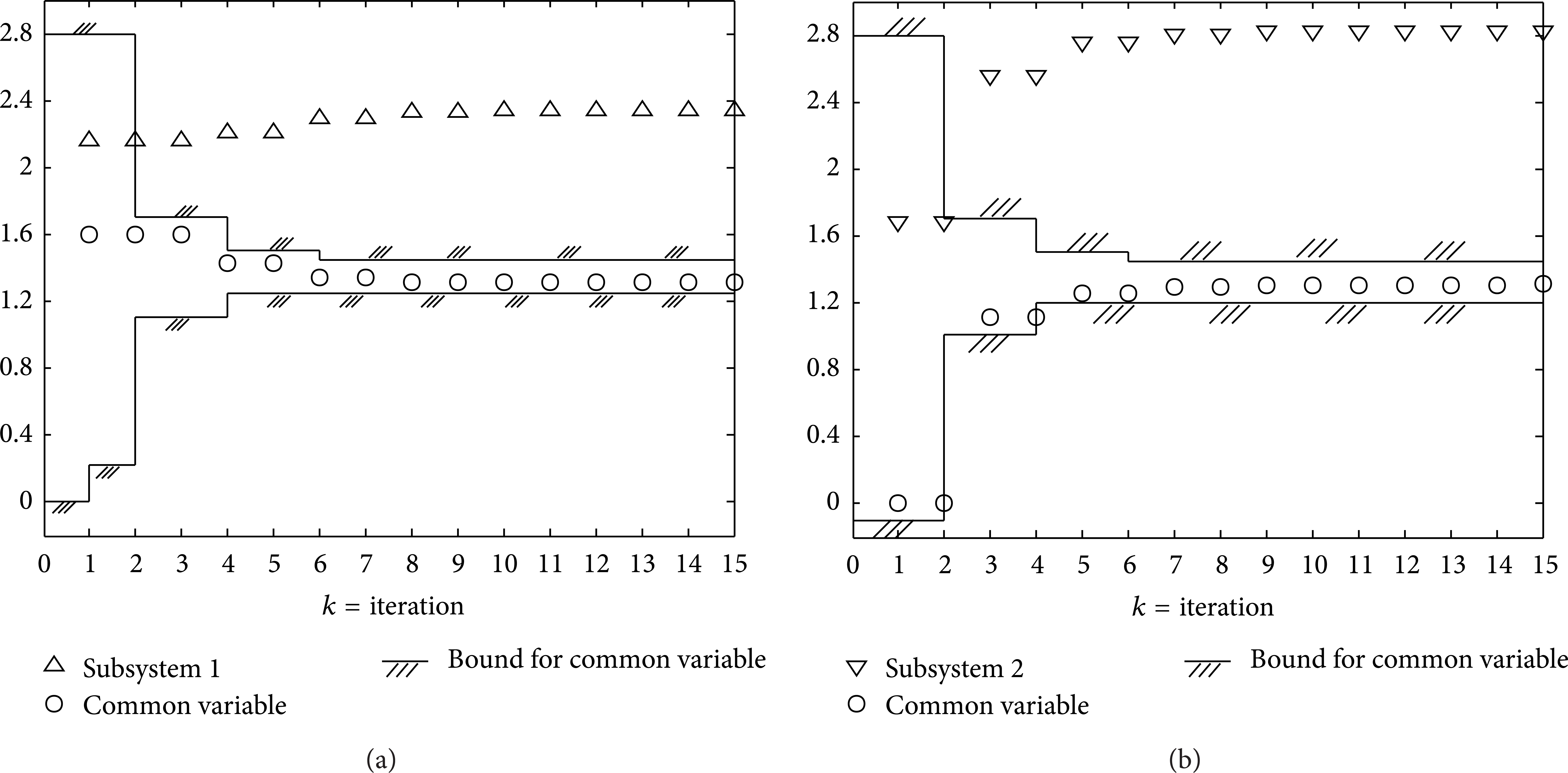
Iteration processes of solving example 2 by BTC in the (a) first and (b) second subsystems.
The comparisons of computational cost between the BTC method and methods proposed in [4, 18, 20–22] is shown in Figure 7, including the quadratic penalty method (QP), the quadratic penalty method with block coordinate descent method (QP-BCD), the augmented Lagrangian method (AL), the augmented Lagrangian method with BCD (AL-BCD), the augmented Lagrangian with alternating direction method of multipliers (ALAD), and truncated diagonal quadratic approximation method (TDQA).

Computational cost versus solution accuracy.
5. Conclusions
MDO problems have been decomposed into hierarchical structures with one system level and multiple subsystems. The main task in the decomposed multidisciplinary design optimization algorithm is to minimize the cost function and diminish the discrepancy between subsystems simultaneously. The well-known method, analytical target cascading, formulates the multiobjective formulations in terms of the weighted discrepancy functions in order to maintain the consistency between subsystems. However, the choice of the weighting coefficients is very problem dependent and improper selections of the weighting coefficients will lead to incorrect solutions.
In this paper, a new bounded target cascading method is proposed to solve the MDO to avoid the problems associated with the weighting coefficients. Instead of the point targets assigned for design variables in the analytical target cascading method, bounded targets are introduced in the new method. The target bounds are obtained from the optimal solutions in each level. Furthermore, the response bounds are established based on the optimal solutions from the subsystems and utilized to replace the weighted discrepancy functions of responses in the analytical target cascading method. If the common variables exist, they are coordinated based on their sensitivities with respect to design variables. The numerical examples validate that the single-objective bounded target cascading can efficiently and accurately find the optimal solutions.
How to efficiently formulate a hybrid framework of hierarchical ATC and nonhierarchical ATC for large scale MDO problems is the further work.
Footnotes
Nomenclature
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was partially supported by the National Natural Science Foundation of China under the Grant no. U1330130 and Fundamental Research Funds for the Central Universities under the Grant no. ZYGX2012J098.