
Abstract
A distributed MIMO radar network consists of a large number of transmitters/receivers to cover a sensing area of interest but under the constraint that the number of antennas is limited. The problem of selecting a subset of antennas at a sampling time to maximize the diversity capability of the MIMO radar in terms of target resolvability is addressed from the information geometric viewpoint in this paper. Fisher information matrix of distributed MIMO radar which takes both radar waveform and SNR into account is derived as a function of individual antenna locations. The Fisher information distance (FID) between the measurement distribution based on all antennas and that based on only the selected set of antennas is calculated and is adopted as the criterion of selecting a subset of antennas. The underlying antenna selection problem is then to select a subset of antennas from all antennas which can result in the “shortest” FID with respect to a given target location. Since an NP hard search process is involved, an exhaustive search method is considered for efficient antenna subset selection. Simulation examples are presented to demonstrate the effectiveness of the proposed algorithm compared with other criteria in different antenna configurations.
1. Introduction
A multiple input multiple output (MIMO) radar network consisting of multiple widely separated transmitters and receivers is known as a distributed MIMO radar [1] and it is capable of jointly processing signals collected by all receivers in a fusion center [1]. The work on the MIMO radar systems with distributed transmitters and receivers, initiated by Fishler et al. in [2, 3], has attracted great attention of many researchers in the last decade [4–10]. A significant advantage of MIMO radar over a conventional radar is that the widely separated transmit/receive antennas are able to capture different cross sections of a target and thus potentially provide information about the spatial scattering properties of the target referred as spatial diversity gain [3], which can be utilized to avoid target scattering scintillations and potentially create a superior performance in detecting low-observable target (e.g., stealthy, low signal-noise ratio target, subject to some countermeasures) [11].
Advanced hardware technology development enables the low-cost, portable radar devices equipped with wireless communication ability to be built. It is desirable to understand the important issues and develop effective algorithms to facilitate the joint signal processing of a MIMO radar that encapsulates a large scale of transmitters and receivers.
The number of transmitters and receivers and their locations play a critical role on the sensing capability of a MIMO system. Practically, a particular antenna placement in a MIMO radar may not be controlled by the operator. Moreover, the number of antennas that can be utilized for joint signal processing may be limited by the network communication capability and power availability. In addition, the realization of an effective sensor network with a significant lifespan will rely on energy awareness at both the node and system levels [12]. One of the central issues for radar system design and resource management to address is energy-constrained dynamic antenna selection; such a system will require the antenna selector that can determine which antennas should be active. Like optimal path planning, the main idea behind the antenna selection is to create a balance between the amount of power, that is, the number of active antennas, and the amount of information that can be gained with a predefined cost function.
In target localization problem, the geometrical dilution of precision (GDOP) metric, which is commonly used in global positioning system (GPS) for mapping the attainable localization precision for a given layout of GPS satellites positions, is adopted as an evaluation criterion by Godrich et al. in [13] to select subset of radars. In [14] the authors investigated the estimate uncertainty ellipse whose area is inversely proportional to the determinant of Fisher information matrix (FIM). The design goal is to maximize the diversity capability of the MIMO radar in order to capture the amount of information about target location from the selected set of antennas as close as possible to that obtained by using all antennas. However, either GDOP or determinant of FIM is absolute quantity measured by the network and it is not suitable to schedule sensors using one absolute value since the sensing ability varies among different radar layouts.
Information geometry, as the study of intrinsic properties of manifolds of probability distributions, is proposed by Amari and Nagaoka (2000) [15], where the Riemannian metric tensor is defined as the FIM. The applications of information geometry to statistical inference have gained certain degree of success. In [16], information geometry is used to provide additional perspective on the sensor performance analysis and has been identified as a sophisticated powerful tool. This work is motivated to incorporate the specific properties of information geometry to facilitate antenna selection in MIMO radar network, using target localization as exemplars. The main difference between this paper and [13] is as follows. In [13], the FIM without considering path-loss effect is derived and GDOP is used as a metric of target localization to select the optimal subset using multistart local search (MLS) algorithm, whereas, in this paper, we derive the explicit FIM expression taking into account the range-dependent signal-to-noise ratio (SNR) and propose Fisher information distance (FID) in the statistical manifold as the evaluation criterion, which is one relative metric of corresponding configuration for optimization of antenna selection. Then we investigate the selection using exhaustive search method and compare the results with that using other criteria.
Antenna distribution optimization problem may be cased in two scenarios including (1) antenna placement problem: the deployment of M transmitters and N receivers in order to cover a surveillance region (to achieve a constant Ricci curvature of the underlying information surface [16]); (2) selection of a subset antennas under the constraints of total antennas involved in data processing (to achieve maximal information locally measured by FID). In this example, we consider the latter case where two selection strategies are considered. One is to find the minimal subset of antennas satisfying the FID threshold and the other is to achieve the minimal FID with fixed size of antennas.
The main contribution of the work is as follows: (1) derive FIM as a function of signal bandwidth, antenna locations, and SNR; (2) define the cost function from the information geometric viewpoint for selecting a subset of antennas from total available antennas; (3) formulate two optimal antenna selection strategies and describe optimal antenna deployment with respect to specific stealthy target; (4) compare performance with other cost functions.
The paper is structured as follows. In Section 2, system model for target localization in a distributed MIMO radar network is described and the FIM of the underlying network parameterized by target location is derived, where SNR as a function of signal travel range and radar signal bandwidth are explicitly taken into account. In Section 3, the information geometry theory is introduced and the FID for antenna selection is derived, respectively. Section 4 proposes the antenna selection strategies in terms of two different objectives and solves them using exhaustive search method. Simulation results are presented in Section 5. Finally, Section 6 concludes the paper.
2. Problem Formulation
2.1. System Scenario
The MIMO radar network under consideration involves M transmitting radars and N receiving radars and they are assumed to be widely separated and time synchronized. As shown in Figure 1(a), in (a) 2D area of interest, the locations of the kth transmitting antenna and the lth receiving antenna are denoted as
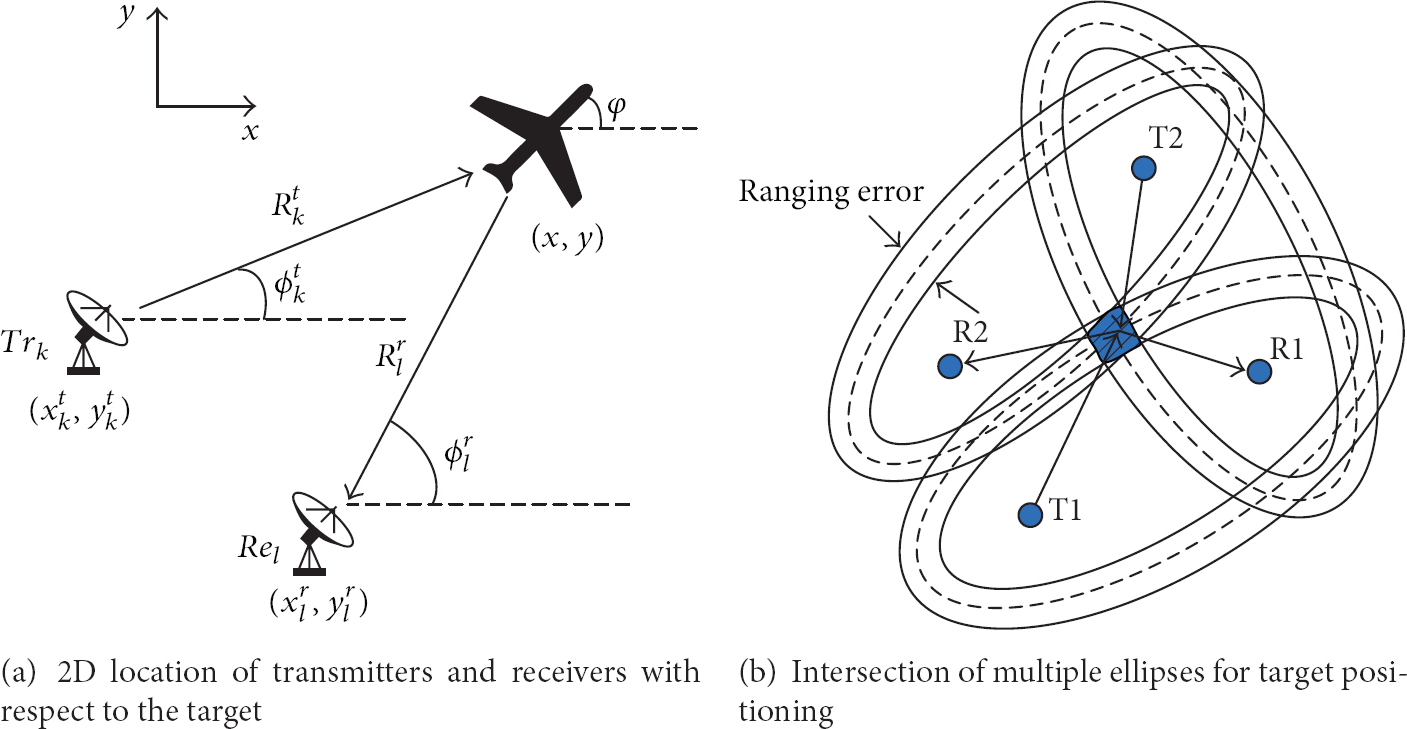
Depiction of two-dimensional target localization in distributed MIMO radar networks.
Active localization is generated through multilateration. In multiple radar systems the time delay measured between a transmit-receive antenna pair defines an elliptical path of possible target locations, drawn using the locations of the transmit-receive antenna pair as the foci of the ellipse [13]. Each ellipse has an uncertainty region that is proportional to the time delay variance. The target is probably located in the intersection of multiple ellipses as the shadow area depicted in Figure 1(b). While the localization result is most accurate, in theory, when all radars are being active, it is usually better to invoke only a subset of sensors in order to conserve the power supplies for the network.
Let


In some applications, the total number of antennas that can be used at each time is limited and there is an antenna selection problem. In this work, we assume that for a given MIMO radar the measurement of target location can only be obtained from the processing of the signals of a subset of antennas. The underlying problem is how to choose a subset of transmitters and receivers from the total number of available antennas for a given target location such that measurement error is minimized. Next, the signal model and measurement model of MIMO radar are described and the likelihood function and thus the Fisher information matrix for the underlying measurement problem are derived.
2.2. Signal Model
A low pass equivalent of orthogonal signal transmitted from the kth transmitter may be represented by
Let



In view of (2) and (4), it is clear that, under the criterion of maximum likelihood estimate (MLE) of the delay
2.3. Measurement Model
In the joint signal processing, a low pass received signal is implemented with a bank of matched filters to separate signal from different propagation path. The time delay measurements may be expressed in a vector form as




Under the assumption that signals from different propagation paths are independent, the time delay measurement vector

Target localization problem is then to estimate
3. Fisher Information Matrix and Fisher Information Distance
From the measurement distribution described by (10), one is able to derive the Fisher information matrix which encapsulates full information capacity of the underlying sensor network. The latter serves as the metric tensor of a statistical manifold and defines the local distance-related property under the Levi-Civita connection. Naturally, the Fisher information distance defined as the shortest geodesics between two points on a statistical manifold is considered as a similarity measure between the two distributions corresponding to these two points.
3.1. Fisher Information Matrix
Based on the measurement probability density (10) with respect to target location
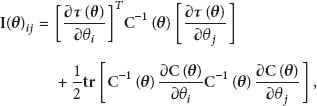
Substituting (11) into (13), we obtain the following expression of the FIM:



To address the antenna selection problem, we introduce a set of binary variables to model a binary antenna selection process
Hence, the FIM due to a subset of antennas can be expressed as
From the derived FIM expression (19), the following observations can be made.
The achievable Fisher information about target state Contributions from multiple propagation paths are additive due to their independence of each other. The values of FIM vary with different combinations and configurations of antennas.
3.2. Fisher Information Distance
The antenna selection problem can be formulated in an information theoretic framework. Our aim for antenna selection is to derive optimal policies for selecting a subset of antennas under resource constraints such that the available Fisher information is maximized. To that end, there are several functions characterizing the information gain. The Kullback-Leibler divergence (KLD), shown in (20), is one successfully used measure of difference between two probability distributions though it is not a true metric since it is not symmetric and does not obey the triangle property. Note the following:

Here we introduce the Fisher information distance (FID) or Rao's distance to measure the difference between the measurement distribution with all antennas and that with the selected subset of antennas. In principle, all FIM related measures such as the GDOP and the determinant/trace of FIM can be effectively utilized to solve sensor selection problem in [13, 14]. The justification for using FID comes with several reasons as follows.
FID is a genuine distance metric in a statistical manifold, while other “distance measures” like Kullback-leibler divergence (KLD) are not true metrics; for example, they are not symmetric. Both GDOP and determinant are absolute values measured and are not able to tell how close is the selected subset to the best estimation performance using all radars, while the FID can identify the closeness of the optimal subset to all radars.
The FID between two distributions


The FID in (21) is defined as the shortest geodesics joining

Consequently, the policy for optimal antenna subset selection under resource constraints can be stated in the following simple form:

Substitute (24) into (23), and the FID can be rewritten as


For subset selection problem, each subset of radars will obtain a different probability distribution of the target location parameter, which can be treated as a point on the statistical manifold. Based on the above analysis, the difference between two distributions of subset and fully used radars can be measured in terms of FID
4. Practical Antenna Selection Strategies
In this section, two practical strategies for selecting a subset antennas under different constraints to obtain the best possible parameter estimation accuracy for a distributed MIMO radar network are discussed.
4.1. Minimal Subset Selection Strategy
The minimal subset selection strategy is to identify a minimal subset of transmitters and receivers for the MIMO radar network at a sampling time such that the FID calculated in (25) is less than the threshold

It is formulated as a nonlinear knapsack problem (NKP) [21]. The constraint on the capacity of the NKP is the FID, where the FIM metric is used to express it. By doing so, the subset size is minimized together with the FID threshold achieved. This problem can be exactly solved using global optimization techniques, such as branch and bound or exhaustive search, although those methods are very time-consuming. Instead of using the heuristic algorithm which has a complexity of
4.2. K-Subset Scheduling Strategy
The K-subset scheduling strategy is to minimize the FID calculated in (25) by selecting only K active antennas in the MIMO radar system from the available M transmitters and N receivers. The problem may be formulated as

The constraint on the capacity of the NKP is size of the subset. Though the heuristic algorithm in [13] provides significant computational savings compared with the exhaustive search, it can only approximate the exact global optimum. Likewise, the exhaustive search method offers a complexity of
5. Numerical Analysis
In this section, numerical simulation analysis is provided for the subset selection algorithms using the FID as the criterion.
5.1. Network Configuration
Consider a MIMO radar system with

MIMO radar layouts; Cases 1, 2, 3, and 4.
5.2. Target Model
To demonstrate the spatial diversity gain obtained by a distributed MIMO radar, a target RCS model which is an extension of the bistatic RCS model in [22] is adopted in the simulation. Transmitters and receivers in different angles with respect to the target will mostly lead to different reflection coefficients. As shown in Figure 3, the model is a function of the incident angle

RCS model for distributed MIMO radar.
5.3. Criteria Used in the Comparison
The performances of antenna selection results via the FID, KLD, GDOP, and determinant of inverse of FIM are compared in the following two antenna subset selection scenarios described in the previous section. And the GDOP can be expressed as

5.4. Simulation Results
5.4.1. Minimal Subset Selection Analysis
The given FID, KLD, GDOP, and determinant thresholds are set to 0.5, 0.15, 1.5, and 0.6, respectively. The subsets selection results for Case 1 through Case 4 are shown in Table 1.
Minimize subset size.
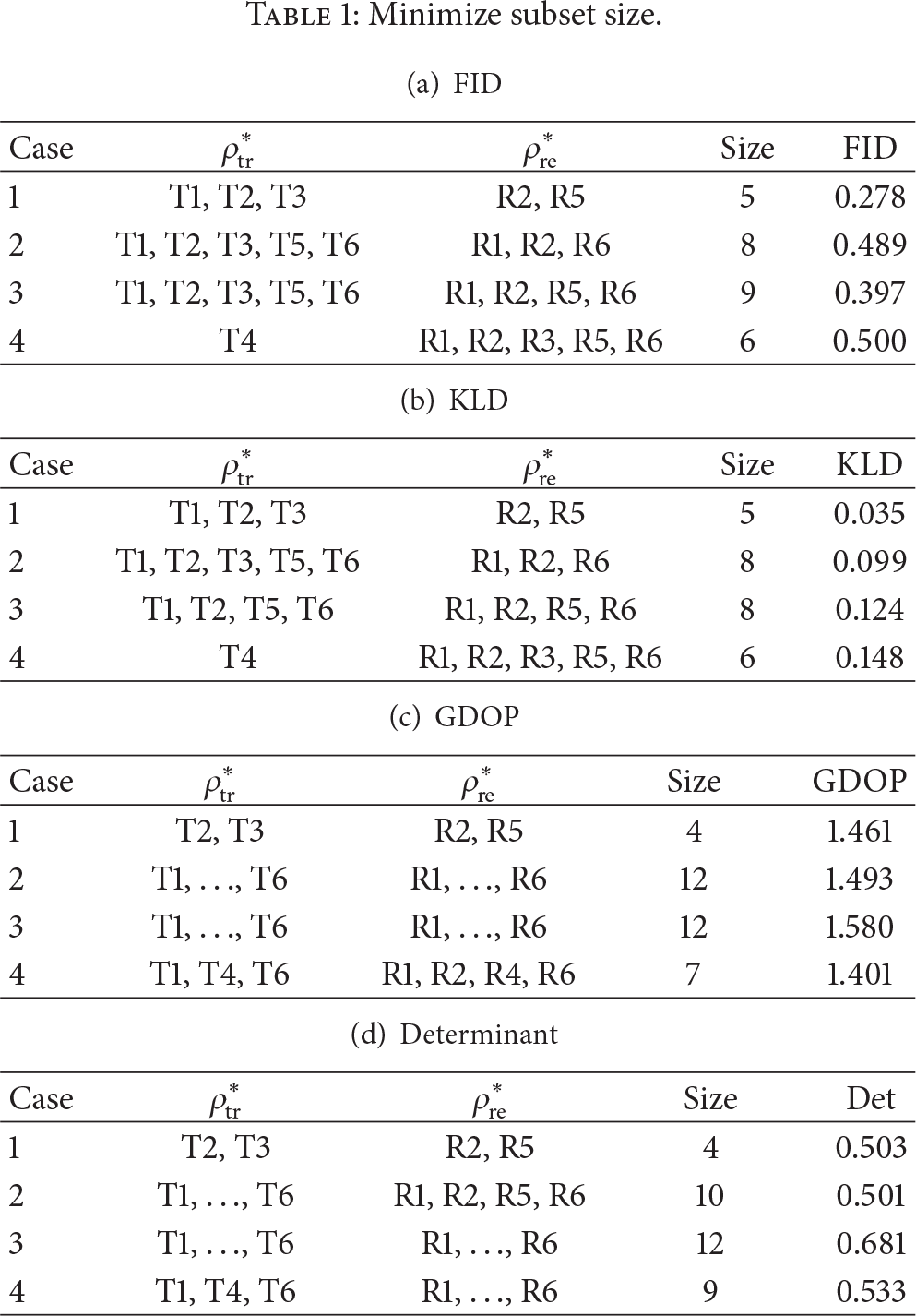
It can be seen from Table 1 that transmitters or receivers with orientations approximately perpendicular to the object, in other words, with larger reflection coefficients, tend to be selected, like transmitters 2 and 3 and receivers 2 and 5 are selected via all four evaluation criteria in Case 1. Besides, the transmit-receive path providing best angular spread tends to be selected, like the result for Case 4 in Table 1(a). Also, the minimum size of selected subset in Cases 1 and 4 is much smaller than that of Cases 2 and 3 in four tables due to the greater angular spread configuration in Cases 1 and 4. In addition, the result for Case 3 in Tables 1(c) and 1(d) suggests that even when all the underlying radars are used, we are still not able to achieve the GDOP and determinant threshold, which is the drawback of using the absolute values for this problem. The numbers of selected subset using relative quantities, FID and KLD, are mostly the same.
Figure 4 shows that uniformly distributed MIMO radar networks, like Cases 1 and 4, need small number of radars operating due to the spatial diversity gain while the nonuniform networks in Cases 2 and 3 need more radars to satisfy the threshold.

Minimum subset selection results.
5.4.2. K-Subset Selection Analysis
The subset size of MIMO radar is set to
Minimize the FID.
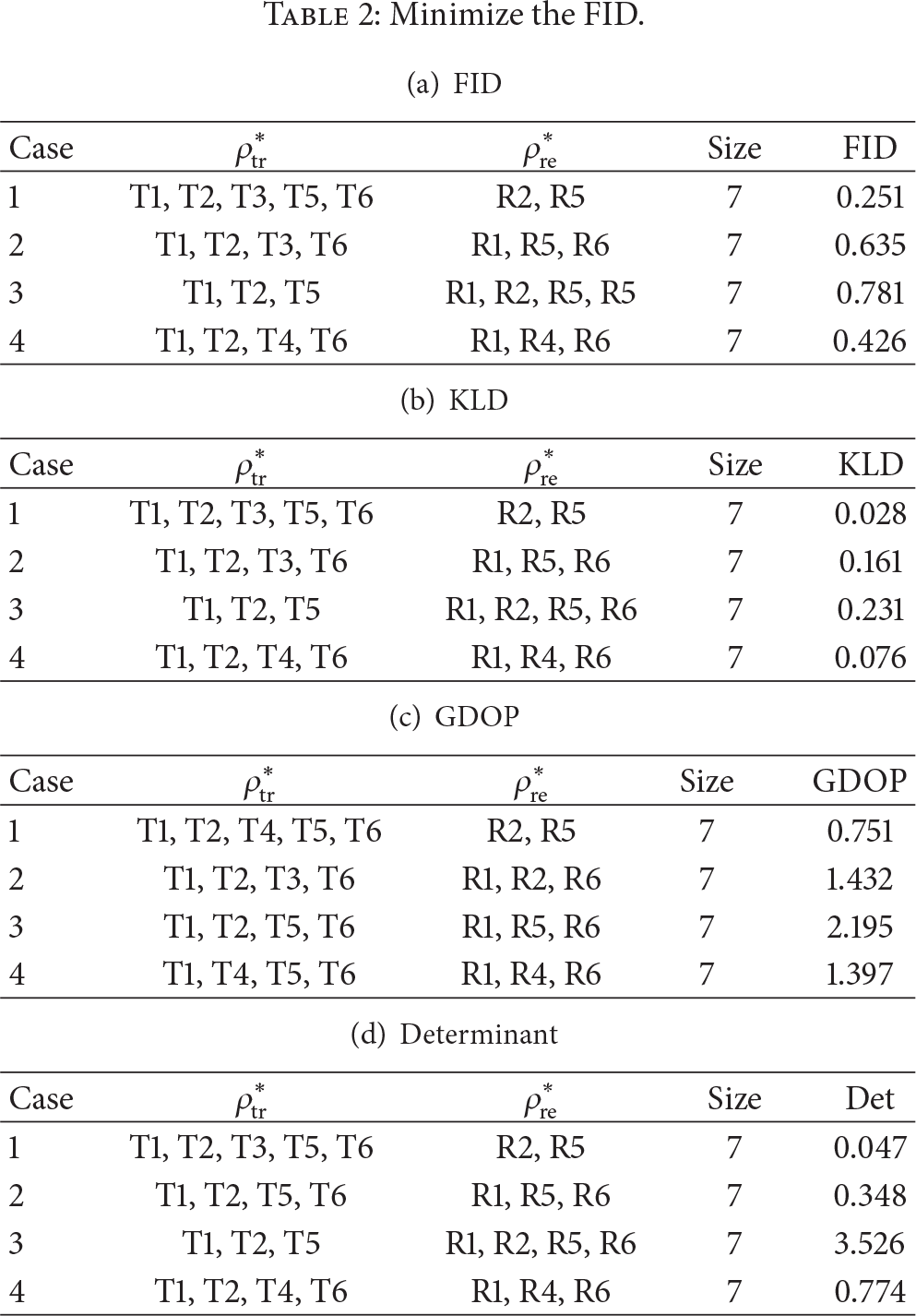
It can be seen from Table 2 that transmit-receive path with larger reflection coefficients as well as the best angular spread is favorable over others. Plus, as illustrated in Tables 2(a), 2(b), and 2(c), Cases 1 and 4 outperform Cases 2 and 3 for target localization in terms of smaller FID, KLD, and GDOP, respectively, while this is not obvious in Table 2(d). The combinations of selected radars in four cases using FID and KLD are mostly the same.
In Figure 5 the FID values of optimal selected subset curves versus number of radars are calculated for the four different configurations. The range of subset size is varied from 4 to 12. The FID values decrease with the increasement of subset size, which suggests that the probability distribution of target location for subset approaches the best one with more antennas involved. Additionally, like the analysis of strategy 1, uniformly distributed MIMO radar networks, like Cases 1 and 4, obtain smaller FID values due to the better spatial diversity gain than those of Cases 2 and 3 with the same subset size.

K-subset selection results.
5.5. Result Discussion
The following may be deduced from the simulation result analysis.
Antenna selection is a kind of sensor management to accomplish a balance between operational objectives and operational constraints [23]. Although the spatial diversity gain with more antennas will benefit the target detection and parameter estimation, antenna selection technology will reduce the communication requirement as well as the transmitted power under resource awareness. Different structures of antenna deployment obtain different information about the target location due to the target RCS fading with angles. The uniformly distributed MIMO radar configuration like Case 1 is demonstrated to be the best choice for surveillance over a region since all antennas are uniformly spread around the target compensating the RCS fluctuations. Different cost functions for determining the optimal antenna selection lead to different results. The FID directly measures the distance between two probability distributions in the statistical manifold. It has been demonstrated to be effective for antenna selection, and more importantly it can identify the closeness of the optimal subset to all radars while the GDOP or determinant can not. The KLD, as an information gain, can also measure the similarity between two probability distributions, though it is not a real metric in statistical manifold. The transmit-receive path with high target RCS value tends to be selected since the corresponding SNR is large. Besides, the angular spread of radars plays an important role in antenna selection. In our paper, RCS around the directions that are perpendicular to the target body is higher since the cross section there is large. Therefore, we can deploy the transmitters and receivers according to some prior information about target RCS model and its heading direction to observe the target body. Since the size of the underlying antennas in our paper is modest, the exhaustive search method can effectively obtain the global optimum. For practical situations, we need the greedy algorithm to do the optimization for the sake of computational reduction and saving time when the search space is large.
6. Conclusion
In this paper, we address the problem of optimal antenna selection analysis for distributed MIMO radar network for target localization by utilizing theory of information geometry. Firstly, we derived the explicit FIM of target location which takes both radar signal parameter and SNR into account. Then, the information geometry is used to analyze the intrinsic property of multivariate normal distributions and the Fisher information distance between subset and all radars for positioning target is derived. In order to solve this NP hard search problem, we adopt an exhaustive search method to efficiently select the subset of antennas of the shortest FID for a given target location from all possible combinations of subsets drawn from the
Footnotes
Appendix
Let
A curve
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The authors wish to thank Hana Godrich in Princeton University, USA, for her insightful advice. The work of Xiang Li was supported in part by Grant from National Science Fund for Distinguished Young Scholars under no. 61025006.