
Abstract
The railway is one of the most important facilities for freight logistics. This paper suggests the use of the container security devices (CSDs), which has been adopted for the marine transportation so far, to enhance the security of railway freight transportation. The proposed protocol, CSD Chain Network Protocol (CCNP), was designed for a chain-form network of CSDs, each of which is attached to a container. In CCNP, unauthorized access to freight is reliably reported to the reader deployed at the locomotive. CCNP also cares about the fairness in energy consumption. In a usual chain network, a tag closer to the reader consumes more energy since it ought to forward packets coming from rear tags as well. However, in CCNP, the tag energy consumption for packet forwarding is always the same regardless of the position in a chain owing to an efficient data fusion scheme. In our simulation using QualNet, CCNP reduces the number of disconnections between tags by 59.5% as compared to general chain networks. The energy consumption also decreases by 91.3% of other networks not using an aggregation method.
1. Introduction
The railway is one of the most important facilities for freight logistics. The railway is the most economical and preferable one among various land transportation systems because the large amount of freight can be transported at one time. Practically, in countries with very large territory, such as Russia and China, the railway takes the biggest role in the land transportation.
Then, the freight train, especially in large countries, is very long, consisting of more than 50 cars. A great amount of freight can be transported at a time, but such a heavy weight makes the train move very slowly. This slow speed makes the freight train an easy target of train robbery while it is passing a desolate area. Thus, the interest in the safety of the railway transportation has been raised by many institutes and companies [1, 2].
The first step of safety is the intrusion detection. The physical security by any guard or police can be provided only after detecting the attempt of robbery. Container security device (CSD) is suitable for this purpose. Originally, the CSD RFID tag emerged to guarantee the safety of containers. In 2006, the US government announced an act of Congress that CSD tags must be attached to all containers coming to the US from 2012 [3]. This requirement is spreading to other countries. The current CSD can record problems that happened during marine transportation and encrypt transmitted messages for security. If a container is forcibly opened by someone without authority during transportation, the record is stored in the CSD. This record is investigated in the destination port and appropriate actions are performed on the container. However, this is not enough to provide the safety for train transportation. In order to fight any robbery, the robbery ought to be reported in real-time, but current CSDs just keep the record until it is read by an interrogator. Thus, the CSD tags attached to freights should compose a network. In this network, any event on a CSD can be reported to a server via other CSDs.
More than likely, the CSD network for a train will have the form of a chain as shown in Figure 1. A reader deployed in the locomotive collects data from tags attached to freights on cars. Rear tags, which are far from the reader, depend on front tags to report its states to the reader.

Chain network.
The conditions required for the CSD chain network are as follows.
Quick Report. Any emergency on a CSD must be quickly reported to the reader. Reliability. Report messages should be delivered to the reader even when some tags are not working. Fair Energy Consumption. Front tags (closing to the reader) must not consume excessive energy to forward messages for rear tags. Low-Power. Tags have to support low-power communication, considering the long time of travel due to the slow speed of freight trains.
Some chain-form networks have been proposed for sensor or ad hoc networks [4–11]. Compared with them, CCNP can provide a more power-efficient and reliable communication for the safety of train transportation. Instead of a separate response from each tag, one message starting from the farthest tag from the reader is elevated toward the reader, adding up the state information of all tags with a data fusion scheme. Also, although one tag is out of operation, the chain is not broken since the directly front and rear tags of the failed tag can communicate directly.
The main contributions of CCNP can be summarized as follows.
Preparation of a Countermeasure against the Chain-Broken Issue. To the best of our knowledge, any previous chain-based network [4–11] does not consider the breakdown of the chain, although the chain can be frequently broken by the failure of a single tag. While the previous works take account of transmission errors only, CCNP provides a way to overcome the chain-broken problem by allowing each tag to adjust the transmission power dynamically depending on the situation. The resolution of the chain breakdown results in the higher packet delivery ratio. Guarantee of the Even Power Dissipation. In usual multihop sensor or RFID networks, nodes closer to a gateway or reader consume more energy because they have to forward not only their own packets but also packets for others. On the other hand, all tags in CCNP transmit and receive packets in the same number of times on average, regardless of their relative position in the chain. This leads to the even power dissipation and the guarantee of similar lifespan for all nodes. Reduction of the Message Overheads. CCNP remarkably reduce the number of packets as compared with general networks with the chain or tree topology. First, adopting a high-gain directional antenna, a reader can send command messages to all tags at a time. Second, replies from all tags are combined into a single message by a specific data fusion method. Although some existing works [8–10] allocate TDMA slots to each tag to guarantee the packet transmission without a collision, this may not much contribute to the reduction of the transmission number. Provision of the Upper Bound on the Problem Report. Each tag in CCNP is given the same amount of time constraint for its reply to reader's commands. If any tag does not meet the time constraint, the next hop tag in the chain promptly begins the process to send its own reply message. Thus, the maximum waiting time for the reader to receive tags' reply is limited by the production of the number of tags and the time constraint for each tag. As a result, if any problem occurs at one tag in the chain, it is reported to the reader within a fixed time limit. Practical Service for Current Railway Transportation. Last but not least, CCNP is the practical multihop service to protect the current railway transportation. All the specific numbers, including the allowed retransmission number and the coverage of the two-level transmission power, as well as the way of data fusion were devised with considering existing railway transportation systems. The first goal of this study is to design a practical network protocol that can be directly used in the present railway transportation.
This paper is the extended version of our previous work [12], which proposes a communication protocol called CSD Chain Network Protocol (CCNP) for safe railway transportation. While the previous work explains only the operation of CCNP itself, this extended version focuses on the analysis of the protocol for the safety as well.
The rest of this paper is organized as follows. In Section 2 related works are introduced. Section 3 describes the proposed protocol CCNP, including tag and reader requirements. Section 4 analyzes the features of CCNP and shows that CCNP can meet all the required conditions of the CSD network. Section 5 describes the experimental results using real hardware. Lastly, Section 6 concludes this paper.
2. Related Work
Lindsey and Raghavendra [4] design a chain network for all-to-all broadcasting in an urban scenario. Data transmission starts at one end of the chain. While being forwarded toward the other end of the chain, the data packet is concatenated with the data of each relaying node. Since each node does not generate an independent packet for its own data, the number of transmitted packets can be significantly reduced, resulting in the energy saving. However, this scheme has to provide reliable solutions to the following problems. First, the chain may be broken. Depending on the situation, for example, node error or link error, an appropriate action should be executed. Second, there is no limit on the length of the packet payload. As the number of intermediate nodes grows, the concatenated payload becomes lengthened, thereby causing the higher probability of transmission error. Finally, only data part is concatenated to the received packet by each relay node. Thus, an addressing method should be provided to differentiate between data from each relaying node, although we admit the addressing may not be needed in case that this scheme is applied for data gathering in sensor networks. Such a scheme is called PEGASIS (power-efficient gathering in sensor information systems) [5].
EEPB [6] is an energy-efficient PEGASIS algorithm and IEEPB [7] is an improved EEPB. The former guarantees that the total link distance of a chain network do not increase too much. The latter additionally optimizes the election of the leader by considering both the residual energy and the distance to the base station (BS). A node that is closer to BS and has more residual energy is given the higher priority to be the leader. This method, however, needs too much message overhead. Initially, BS has to broadcast a hello message to collect basic network information from all nodes. Calculating the average distance from nodes to BS using the collected information, BS should notify it to all nodes again. Also, all nodes have to report its own residual energy to BS every round. Furthermore, the distance between two nodes is estimated using the received signal strength (RSS). RSS is not an accurate ranging method as it is considerably affected by the environmental condition.
The goal of EECF is similar to EEPB, shortening the link distance between two nodes. For forming a chain, PEGASIS uses a greedy algorithm in which each node selects its neighbor with the nearest node not already included in the chain. During this procedure, sometimes a very far node is selected as a neighbor because the neighbor selection is performed in order of the farther node from BS first. Meanwhile, EECF utilizes a strip tree geometry algorithm that constructs a hierarchical tree by adding local subtrees one after another. This prevents the appearance of a long link, resulting in the balance of node energy consumption.
The chain network is extended to the multiple-chains by Du et al. [8]. An independent sublinear chain is constructed in each region, all of which ending at the particular center node. Sensing data in each region are transferred to the center node first; then they are combined or separately relayed by the center node. This is similar to the Ethernet using the star topology. The study [8] avoids the situation where two nodes located far away from each other become neighbors in the chain, focusing on the minimization of the total energy to transfer data.
CHIRON [9] splits the entire sensing field into a number of fan-shaped small groups so that multiple short chains may be created instead of a single long chain. This can reduce the data transmission delay and redundant paths, which are the problems of previous works. CHIRON elects some relaying nodes so that chain leaders may not transmit long distance. However, the small groups generated by this method may be too much uneven. Some groups include only a few nodes while others contain a large number of nodes. Also, it can be argued that the burden of being a leader is not fairly distributed to all nodes, since the node with the maximum residual energy must work as a leader all the time.
Similar to CHIRON, Mamun et al. [10] split the target field into small areas by adopting the Voronoi tessellation. Selecting several tentative leaders first, the Voronoi cells are created with the leader being at the center of each cell. However, this may not work in the following case. The tentative leaders must exchange their location information with one another to create the Voronoi cells in the distributed manner. Leaving the message overhead aside, the leaders in the adjacent Voronoi cells may not communicate with each other because the tentative leaders are selected without considering the location. Some leaders may be apart from each other farther than their transmission range. Meanwhile, this work claims that two cells can be merged if one cell contains only few nodes, but it does not mention who decides who must be merged and with whom it should merge. Lastly, they do not explain the data transmission phase clearly, just saying that the use of TDMA is recommended. However, the synchronization overhead for TDMA is not mentioned at all.
CCPAR [11] is a hierarchical chain based routing protocol. The whole network area is divided into several clusters and each node periodically plays a role of the cluster head to ensure the even power dissipation. The cluster heads compose a chain of themselves to deliver data to the base station. They also perform data aggregation for power conservation. If the sensed value is between min and max thresholds and the change from the previous sensed value is less than change factor (CF), the value is aggregated with others. Although CCPAR is energy efficient owing to this aggregation, it requires the base station to have global knowledge about the location of all nodes to form clusters. The TDMA scheduling overhead is also needed for the intracluster communication.
WICKPro [13] is based on the similar motivation to the proposed method. It is a hard real-time protocol for wireless mesh networks with a chain topology, targeting road and railway transportation. Since a token-passing approach was adopted for the sake of easy implementation, only the node holding the token can transmit its data. Then, it does not consider the chance of node failures, particularly the unsuspected breakdown of the token-holding node. In this case the token can be stuck and the entire chain can be broken. Also, WICKPro requests all nodes to have global state information.
The chain networks are also adopted in underground mines to monitor the environment and locate miners since the mine tunnel is very long and narrow like a train. It is worthy to investigate the research related to mines since it can give information about the fading and path loss of channels inside tunnels. Yuan et al. [14] suggest the use of uneven cluster-based networks where a different number of nodes belong to each cluster depending on situation. However, this algorithm requires cluster heads to be uniformly fixed at specific positions in advance and they have to have more functions and resources than other members. In the meantime, CWUMSN [15] allows cluster heads to be selected randomly. Further, some destroyed cluster heads can be replaced with other sensor nodes dynamically. Finally, Haifeng et al. [16] propose energy optimal routing (EOR) for a long chain-type wireless sensor network. EOR makes the length of each hop as even as possible for the fair energy consumption of all nodes. They also introduce the concept of key region around BS, which is the region that can directly communicate with BS. Nodes in the key region take responsibility for the relay to BS in a balanced manner, since nodes closer to BS dissipate their energy more quickly in general.
Most existing studies are about how to form a chain to improve either the energy efficiency or the reliability, not considering a specific application. On the contrary, in our study, a chain network is already fixed because one CSD is attached to a container whose size follows the standard. The main goal of our study is to develop a practical network protocol that can be used in the real railway to guarantee the safety of freights in containers.
3. CSD Chain Network
3.1. Tag Requirements
The proposed CCNP adopts the CSD tag to enhance the safety of train freights. It is an active tag running on 2.4 GHz radio and provides encryption/decryption mechanisms for the security of messages.
Based on these basic features, tags in the proposed system must have at least two levels of transmit power: high (H) and low (L) transmit power level. While the transmission using the L level reliably covers the length of only one cargo car, the H level transmission can cover the length of two cars. The L level is the default transmit power in our system and the H level makes tags in emergency able to send data to nonneighboring tags that are as long as two cars away from them. Although we consider just two power levels in this paper, if the higher power that can go farther than two cars is provided by a tag, the proposed CCNP can be easily extended. Practically, however, in our experiment in a port, we observed that CC2420RF could not reach as far as the length of two containers frequently because the containers made of steel interfere with the RF transmission. Also, the power strength is tightly related to the energy consumption of tags, which will be discussed in Section 4.2.
Active tags depend on internal battery for communication and processing, so power is the most important resource. In order to conserve energy, tags should be able to convert between active and sleep modes. Tags wake up by receiving a low frequency (LF) signal.
3.2. Reader Requirements
The reader is deployed at the locomotive, being connected to permanent power. It can broadcast packets using the transmit power which can cover all tags on a train. Also, the reader has to have an LF chip to wake up sleeping tags, besides an RF transceiver for data. For more antenna gain, a directional antenna is more appropriate for the reader since it is the reasonable assumption that all tags on a train are in the same direction from the reader.
3.3. PHY and MAC
PHY and MAC are based on the IEEE 802.15.4, which is the standard for low-power wireless personal area network (WPAN) [17]. It is suitable for the proposed network since only very short packets are periodically transmitted within short range in our network.
Contention is arbitrated using the slotted CSMA/CA, and either the 16-bit short address or the IEEE 64-bit address can be used depending on a situation. Figures 2 and 3 depict the command and response message formats designed for CCNP. The detailed usage of each field will be explained one by one with the CCNP procedure in the next section.

Command message format from sink.

Response message format from a node.
3.4. Network Protocol
CCNP is composed of seven phases. For the sake of simplicity, we assume that one car carries just one container as illustrated in Figure 4. The reader at the locomotive periodically broadcasts a command called State Collection. Then all receiving tags set their timers so that the farther tag from the reader may start the reply process earlier. As a result, the farthest tag transmits its response message first. Then others record their status on it, instead of generating their own response message, and forward it until it arrives at the reader. The proposed data fusion scheme remarkably reduces the number of transmitted packets without losing the information accuracy. Sometimes tags may not receive a response message from the rear tag due to any communication errors. In this case, tags generate the response message for themselves when their timers expire and transmit it to the front tag. This means that the reader can almost always receive a response message despite the breakdown of the chain. (The only case where a reader cannot receive a response message is that both the first- and the second-level tags from the reader break down at the same time. This will be explained in detail later.) If the message was not generated by the farthest tag, the reader can guess that there was any problem in the network. Several successive State Collections are broadcasted to check the problem for sure.

CSD chain network on train.
Each of the seven phases of CCNP is explained in detail one after another:
(1) The set of the pair [Car number-Tag ID], as shown in Figure 5, is kept in the reader. There are two ways to collect this information. First, it may be given off-line in advance. Assuming less than 50 cars on a train, it does not need much overhead to input the data by manual. Second, the reader may collect the [Car number-Tag ID] information using the Tag ID Collection command in our previous work [18]. The response of each tag to this command is delivered to the reader via multihop. A tag closer to the reader will be referred to as the upper level tag after this. Oppositely, a tag farther from the reader is said to be in the lower level.

[Car number-Tag ID] table in a reader.
(2) The reader periodically broadcasts the State Collection command to check freight status. Right before this command, the reader has to wake up tags from the sleep mode by sending a LF beacon. The State Collection command includes the tag ID list in Figure 5 by default. However, the short version, which does not have the tag ID list, can be used if there has been no change in the list since the last State Collection. The tag ID list is actually contained in Frame Payload in Figure 2. If Frame Length = 0, the command is regarded as the short version of State Collection.
(3) When a tag receives the State Collection command, it acquires the total number of tags and its own car number first. Then it sets its timer for sending a reply to


Notation.

Let us compute
After setting the timer, a tag saves the IDs of four tags within two upper and two lower levels apart from itself. For instance, if its car number is 3, the tag keeps the IDs of tags on cars 1, 2, 4, and 5.
If the short version of the command is received or the State Collection command does not include the tag ID list, the current time-out value and tag list continue to be used.
(4) The lower its level is, the earlier a tag begins to send the response message (Figure 3) because it has the smaller time-out value. In case where every car carries just one container, the time-out value of the last car is 0 as the total number of tags is equal to the last car number. Thus, the tag on the last car sends the response first.
The payload length (Frame Length in Figure 3) in the response message is determined by “2 bits * the total number of tags,” because two bits are assigned to each tag to represent its status as shown in Figure 6. The two bits can represent four possible states in the figure. Note that the status bits are not limited to 2 bits for each tag. In case that more states need to be classified, the number of bits for each tag can be easily extended.
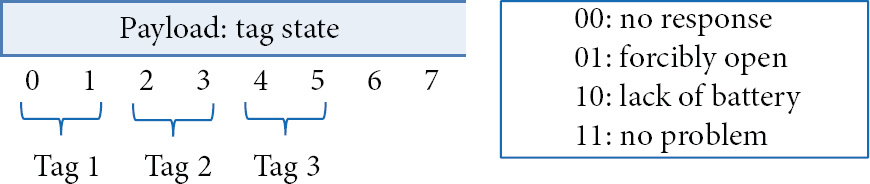
Tag response to State Collection command.
Even though it looks like a too simple data fusion, it has a lot of advantages to assign the fixed two bits to each tag. Just two bits per tag, actually enough to represent all tag states needed for safety, do not increase the size of the entire response message much if the number of cars grows. Fifty cars can be covered with just 13 bytes
Filling out the two bits assigned to itself, each tag transmits the message to the right upper level tag via unicast. The L level transmit power is utilized by default. The upper level tags do not packetize their response messages separately but add their states to the messages received from the lower level tag.
(5) After transmitting the response message, the lower level tag waits until it overhears transmission of the upper level tag. Regarding the overhearing as an implicit ACK, the lower level tag enters the sleep state.
The response transmission mechanism is illustrated in Figure 7. The transmission begins with the L level transmit power all the time. If a tag cannot overhear transmission of the upper level tag before the time-out, it retransmits its message one more time. If it still cannot observe transmission by the right upper level tag, it judges that the upper tag does not work. Then the response message is sent directly to the two-level upper tag via unicast using the H level transmit power. The overhearing is adopted in this case too. If it cannot overhear transmission of the two-level upper tag, the retransmission is performed one more time. Right after, the tag enters the sleeping mode immediately.

Response transmission with transmit power control.
The waiting time of a tag to overhear transmission of the upper level tags is defined as 
Notation.

Each of encryption and decryption is performed one time at the upper level tag. In our simulation with specific hardware equipped with the ATmega128L MCU, at least 4 ms is needed to overhear transmission of upper level tags.
The previous studies [4–11, 13] resolve transmission errors by an explicit ACK or do not clearly mention the resolution. The use of an explicit ACK might aggravate the problem due to the increasing overhead.
(6) The upper level tag begins its response upon the following three cases: (a) reception from the right lower level tag, (b) reception from the two-level lower level tag, and (c) timer expiration. First, when it receives a response message from the right lower level tag, the upper level tag just updates the two bits (Figure 6) assigned for its state and then transmits the message toward its upper level with the L level power.
Second, if a tag receives a response message from the two-level lower tag, the right lower level tag is regarded as being in the “No response” state. Updating total four bits assigned to the right lower tag and itself, the tag transmits the message toward its upper level. The H level power is used so that the two-level lower tag can overhear it.
Finally, if the timer expires without receiving any message and it is not the last tag, all tags in the lower levels are regarded as being out of operation. Leaving the state bits for all the lower tags in the “No response” state, the tag sends its right upper tag a message having its own state only.
(7) Eventually, when the response message arrives at the reader, appropriate actions are required depending on the tag states. First, if any container has been forcibly opened, it is reported to the managers or container shippers via satellite communication.
Second, if any battery lacks power, either the battery or the tag itself is replaced at the next stop. When a new tag replaces an old tag, the [Car number-Tag ID] information in a reader should be updated too.
Lastly, when any tag state is “No response,” the State Collection command is retransmitted up to two times more. If the tag does not respond to all the three sequential State Collection commands, predetermined actions are carried out depending on the importance of the container. If the freight is very important, the report can be delivered to the authority in real-time. Otherwise, the tag is checked manually to reduce false alarms.
3.5. Operation Example
We will briefly see the overall operation of CCNP with an example. Let us assume a chain network with five nodes like Figure 8. (1) First, the reader at the locomotive broadcasts a State Collection command with a directional antenna. Thanks to the [Car number-Tag ID] table in the command, each tag can know its car number and sets its timer,

An example of State Collection with CCNP.
4. Simulation and Analysis
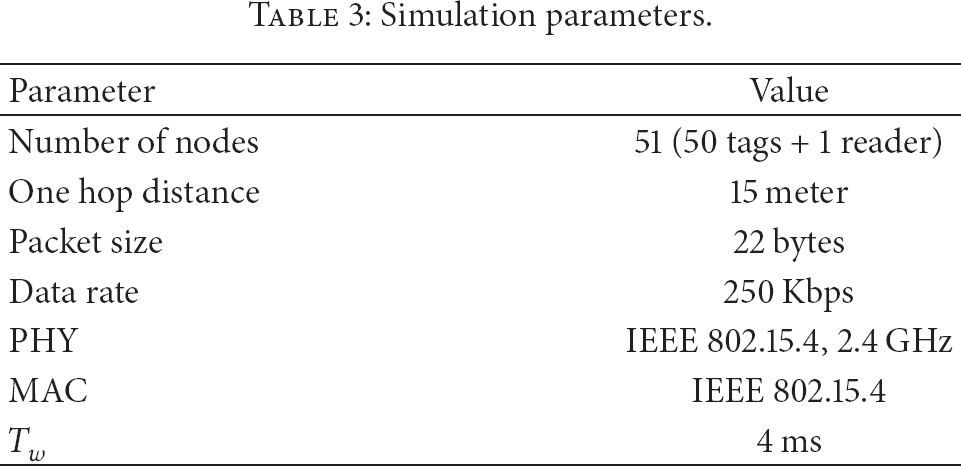
The QualNet simulator was utilized to evaluate the performance of CCNP. Based on the simulation result, we discuss how CCNP satisfies the conditions required for the CSD chain network.
Table 3 summarizes the simulation parameters. We assumed a train consisting of 50 cars each of which is equipped with a CSD tag. The distance between two tags is 15 m, following the size of a standard container, and the moving speed of all tags is ignored because all tags move together with the same speed in the same direction (the relative speed is 0). The waiting time
Simulation parameters.
4.1. Quick Report
The transmission period of the State Collection command determines how quickly we can get a report about any accident. The larger the time interval between two sequential commands is, the longer the time to detect an accident may be. The detection time becomes maximal when an accident occurs right after the previous State Collection is just processed. The average detection time is a half of the time interval between two sequential State Collection commands as it follows the uniform distribution.
Thus, the broadcasting period of State Collection should be decided according to the importance of freights. The larger chance there is for any freight to be attacked, the shorter the period should be. Also, the average time needed for train robbery can be taken into account. In the meantime, you have to note that there is a trade-off between quick report and power consumption. The shorter period of the State Collection commands makes tags consume more energy.
Figure 9 shows the breakdown of power consumption of a MicaZ node. As seen from the figure, a node in Tx, Rx, and idle states consumes 20 times as much energy as a node in the sleep state. The more frequently the command is sent, the shorter the sleep time is. Thus, power consumption may be increased substantially.
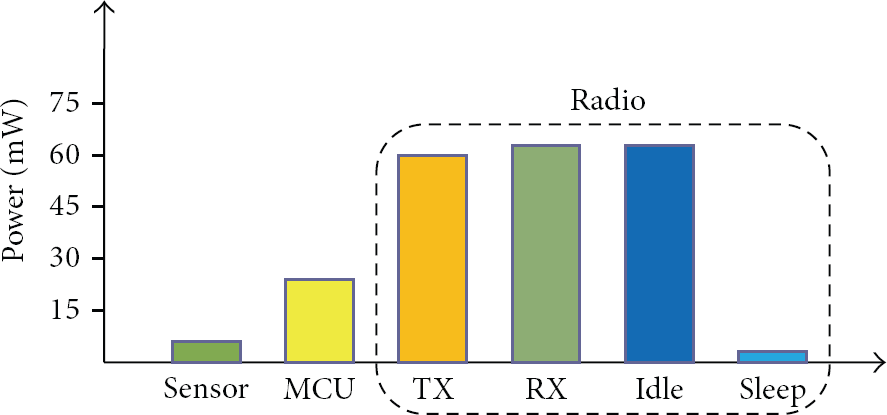
The breakdown of power consumption of a MicaZ node [20].
Also, in order to reduce the active time of tags, the overall duration to get the response message must be minimized. The duration mainly depends on the time-out value
Figure 10 illustrates the average number of tags that cannot receive the response message from the lower level tags against

Tags not receiving a response from lower level against
Before moving to the next discussion, it is noteworthy that we limited the retransmission number to just one for every transmission trial so that the total latency of State Collection may not increase too much. Whenever a tag sends a reply, it has to wait for the implicit ACK for
4.2. Reliability
The reliability of transmission is very important for the safety of freights. Train robbers may firstly destroy a CSD before stealing. CCNP is tolerable to CSD or link failures caused by various reasons. It can deliver a report message to a reader just if two consecutive tags are not out of operation at the same time. This is because CCNP allows the communication between two tags that are two-level apart from each other in emergency. Unlike CCNP, previous chain networks [4–11] do not provide a way to overcome the failure of an intermediate tag along a path.
It may be argued that even CCNP is useless in the case where two consecutive tags are simultaneously broken. However, its chance is very small. Figure 11 illustrates the area where each failed tag can be deployed so that any two failed tags may not be deployed successively. Assume that N, 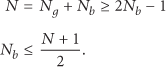





Well-operating
Figure 12 depicts the probability that any consecutive tags are failed at the same time against (a) different number of tags and (b) different failure rate for each tag. As shown in Figure 12(a), the probability of consecutive tag failures grows as the total number of tags increases, but it is just 3.81% even in the 100 tag case. In Figure 12(b), the consecutive tag failure probability is naturally proportional to the failure rate of each tag. With total 50 tags and 2% of the tag failure rate, the probability of consecutive tag failures is just 1.91%. This probability may increase when each tag failure rate grows; but even in this situation, the reader can at least know that some problems occurred since all tag states are “No response” behind the consecutive tag failure point.

Probability of any consecutive tags being failed at the same time.
Figure 13 compares the frequency of disconnections against various link transmission error rates. We did not consider tag failures here because the existing methods always using the same transmit power cannot deliver packets to the sink even in the case of any single tag failure. Compared with the previous methods, CCNP can reduce the number of disconnections by 59.5% by utilizing the higher transmit power in retransmission.

Number of disconnections between tags.
As aforementioned, CCNP utilizes just two power levels because we assume that tags support only two power levels, high (H) and low (L). In fact, as far as the tag transmit power allows or if more power levels are provided by tags, CCNP can be easily extended to support the emergency communication between tags farther than two levels. However, we have to be careful not to increase the transmitting distance too much. The power consumed for packet transmission is proportional to the fourth power of the distance in the land propagation model [21]. As we can see from Figure 9, the transmission is one of dominating factors in wireless node power consumption.
4.3. Energy Consumption Fairness
In most multihop communication networks, nodes closer to a gateway or reader consume more energy due to packet forwarding for rear nodes as well as their own packets. Assuming that a train consists of N cars, the tag at the first car has to transmit N times as many bits as the tag at the last car sends. In contrast, CCNP does not relay a separate message for each tag. Introducing a new fusion method, a tag just fills in the corresponding bits in the message coming from the lower level tag and then forwards it to the upper level. Thus, all tags transmit the same amount of data regardless of the relative position inside a chain-form network.
4.4. Low-Power
Besides the fairness, the power consumption itself is very low since the size of packets is small thanks to the proposed data fusion. This subsection compares the transmission number of CCNP with another method not adopting the data fusion concept.
The transmission number is one of the most important performance metrics because of not only power for transmission but also power for reception. Any data transmitted by one node should be received by another node. Figure 14 compares the transmission and reception numbers of CCNP with other methods not using data fusion. The retransmission caused by transmission errors is also taken into account. While CCNP transmits more times as the transmission error rate increases, the transmission number decreases in previous chain networks. This has something to do with the number of disconnections in Figure 13. Many packets, which can be eventually delivered to the reader by CCNP, are lost because of the more frequent disconnections in previous methods. CCNP reduces the transmission and reception numbers by 76.4% on average as compared to previous schemes.
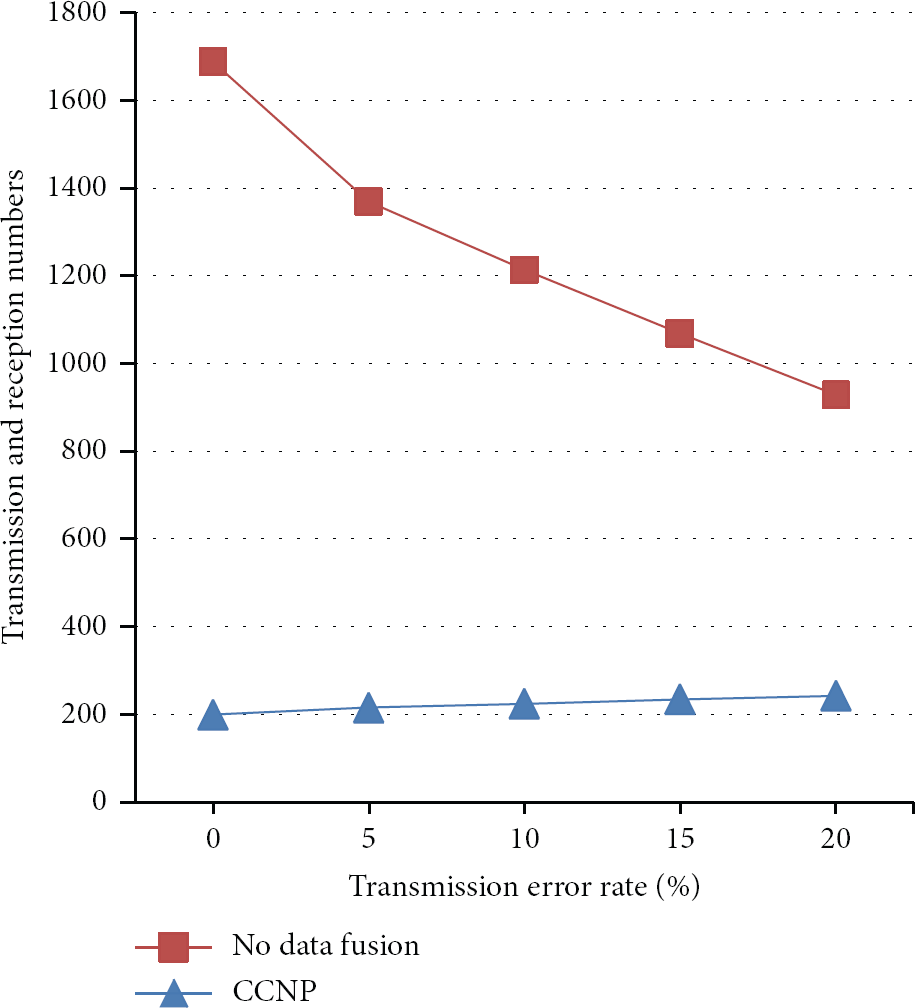
Packet transmission and reception numbers.
CC2420, a ZigBee RF transceiver by Texas Instruments, consumes 18.8 mA for reception as well as 17.4 mA for transmission [22]. According to this, the power consumption reduced by CCNP amounts to 91.3% in CC2420 ZigBee systems.
Furthermore, note that CCNP adopts not an explicit ACK but an implicit ACK. Beside the power consumption to transmit it, the explicit ACK scheme may cause more collisions and retransmission, resulting in the more power consumption. On the contrary, the implicit ACK used by CCNP does not raise an overhead problem separately.
It may be argued that more processing power is needed at the upper level tags because they have to perform a kind of data fusion. However, it is very simple to fill out just two bits for the state of each tag, not requiring complicated processing. Furthermore, the internal processing consumes far less energy than the packet transmission [20].
5. Experiment
The practicality of CCNP was checked through the experiment using real hardware. Firstly, we found the minimum transmit power that can guarantee the connectivity between tags with a high probability. Secondly, the transmission reliability of CCNP was tested using that minimum transmit power. The hardware specifications are summarized in Table 4.
Hardware specification.

5.1. Minimum Transmit Power
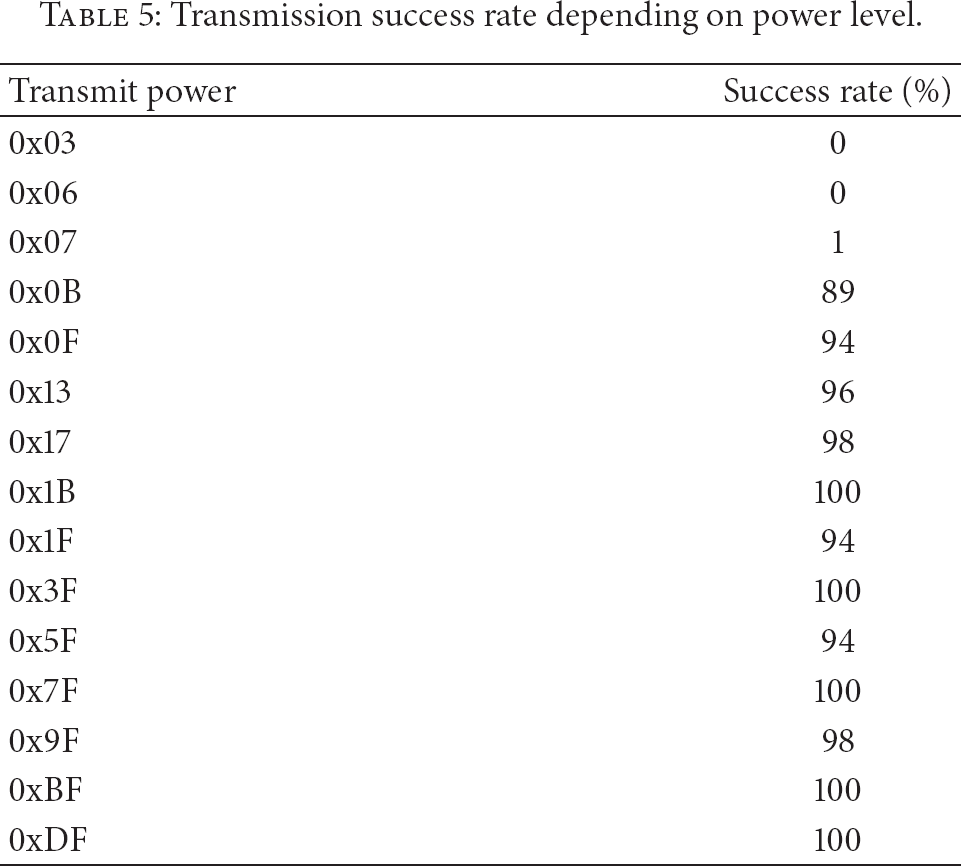
The minimum transmit power to guarantee reliable transmission was firstly observed through the experiments. As shown in Figure 15, the distance between two nodes was set to 15 meters considering the length of a container. Changing the power level, we checked the success rate of packet transmission. The experiment was performed 100 times with every power level supported by CC2420RF.

Transmission between two nodes.
The success rate for each power level is summarized in Table 5. The success rate remained greater than 90% if the power level was at least 0x0F. The higher power did not always improve the success rate due to nondeterministic errors in wireless environment. Therefore, the power level 0x0F can be an optimal transmit power, considering that the higher power cannot guarantee the higher success rate either. Moreover, we argue that the success rate of 94% is enough to provide communication reliability in a protocol such as CCNP, which adopts one-time of retransmission. The probability that two transmissions fail successively is just 0.36%
Transmission success rate depending on power level.
5.2. Network Reliability
In order to test the network reliability, the experiment was performed on the chain network as illustrated in Figure 16. Tag 2 was turned off on purpose to emulate an error situation. Thus, Tag 3 has to transmit the response message to Tag 1 directly with the high (H) level transmit power after the failure of transmission to Tag 2.

Reliability test.
Out of total 1000 trials, 928 times of transmission succeeded. Considering the error-prone wireless channels, CCNP can be said to provide the very high reliability even in the case of some tag failures.
6. Conclusion
We proposed CCNP that is the first communication protocol for a CSD chain network on a train. The use of a CSD chain network may enhance the security of railway freights. Moreover, this network is practical in terms of several aspects. First, any new device need not be installed for the proposed CCNP. Since CSD has already been adopted in the marine transport, the container unloaded from a ship can be immediately loaded onto a train without any additional work. Second, CCNP provides the reliability against unexpected tag or link failures, whereas any previous work does not provide a way to deliver a packet even in the case of single tag failure. Third, message overheads can be remarkably reduced thanks to the practical and simple data fusion. Besides the very low computation complexity, additional control fields like an address are not needed because information bits for each tag can be easily computed using the relative position of each tag. Last but not least, CCNP guarantees the fairness in energy consumption among all tags in the network.
We want to extend this research with the Internet-of-Things (IoT) concept based on a cloud platform in the future. An individual CSD tag may act independently and cooperatively depending on the situation with intelligence.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work was supported by the ICT R&D program of MSIP/IITP (10043907, Development of High Performance IoT Device and Open Platform with Intelligent Software).