
Abstract
The high-speed electric-hydraulic proportional control is a new development of the hydraulic control technique with high reliability, low cost, efficient energy, and easy maintenance; it is widely used in industrial manufacturing and production. However, there are still some unresolved challenges, the most notable being the requirements of high stability and real-time by the classical control algorithm due to its high nonlinear characteristics. We propose a dynamic self-adaptive mixed control method based on the least squares support vector machine (LSSVM) and the genetic algorithm for high-speed electric-hydraulic proportional control systems in this paper; LSSVM is used to identify and adjust online a nonlinear electric-hydraulic proportional system, and the genetic algorithm is used to optimize the control law of the controlled system and dynamic self-adaptive internal model control and predictive control are implemented by using the mixed intelligent method. The internal model and the inverse control model are online adjusted together. At the same time, a time-dependent Hankel matrix is constructed based on sample data; thus finite dimensional solution can be optimized on finite dimensional space. The results of simulation experiments show that the dynamic characteristics are greatly improved by the mixed intelligent control strategy, and good tracking and high stability are met in condition of high frequency response.
1. Introduction
The electric-hydraulic proportional control is a new development of the hydraulic control technique; it is a bridge between modern micro electro technology and high-power engineering control equipment and it is a key technology in modern control engineering. The electric-hydraulic proportional technology has been developed rapidly in recent twenty years. But the requirements of stability and tracking performance cannot be met based on a classical control algorithm for high-speed electric-hydraulic proportional systems. In particular, as a control system or a control process become more and more complex, there is greater disadvantage by traditional mathematical tools and methods for solving the uncertain, time-dependent, and highly nonlinear electric-hydraulic proportional control in theory and application [1, 2]. So, the studies of control performance and control algorithm for electric-hydraulic proportional systems have become popular. At present, many research achievements have been made, such as the robust SRIV control algorithm, the PID control algorithm of multiple objective parameter estimation adjustment (OPEPID), the online self-adjusting PID control algorithm (ATPID), the dynamic propagating nonlinear H∞ control algorithm (DEN-H∞), the online self-adjusting sliding mode control algorithm, and the gain self-adaptation sliding mode control algorithm [3–6].
Compared with the traditional control algorithm, control performance is greatly improved by the above-mentioned methods for common electric-hydraulic proportional systems, but the requirements of stability and high precision tracking performance cannot be solved radically for high-speed electric-hydraulic proportional systems with high nonlinear and time-dependent features. At present, many scholars have applied intelligent algorithms including the ANN and the fuzzy theory to electric-hydraulic proportional controls, and many research achievements have been made [7–9].
The fuzzy control will lead to low precision and bad kineticism because it lacks the ability of self-learning, self-adjustment, parallel computation, global optimization, and complicated data processing. The ANN control cannot meet the requirements of high performance guideline and high control accuracy with slow convergence, long training time, and bad generalization ability [10, 11].
A mixed technology of dynamic self-adaptive internal model control and predictive control based on the support vector machine and genetic algorithm is proposed in this paper; simulation experiments show that good tracking and control effect are reached by the method; a high-performance intelligent control method is developed for high-speed electric-hydraulic proportional systems.
2. A Mixed Intelligent Control Algorithm
2.1. An Identification Network Algorithm
The least squares support vector machine algorithm has strong generalization ability; optimum architectures are automatically organized and the structural parameters are automatically determined so as to minimize the error criterion [12–14]. Because of these feathers it demonstrates great superiority to solving nonlinear problems and can be applied to the high dimensional identification problems of practical complex systems.
Dynamic behavior of high-speed electric-hydraulic proportional systems with high non‐linearity was modeled by the least squares support vector machine (LSSVM); its identification network architecture is shown in Figure 1. Output of a discrete system can be expressed as follows at i + 1:

where x i = (y i , …, yi − n + 1; u i , …, ui − m + 1), x i ∈ Rm + n; a set of training samples generated as follows to design LSSVM identifier:

where x i ∈ Rn + m, and it is input of n + m dimensional training samples; y i ∈ R is output of training samples.
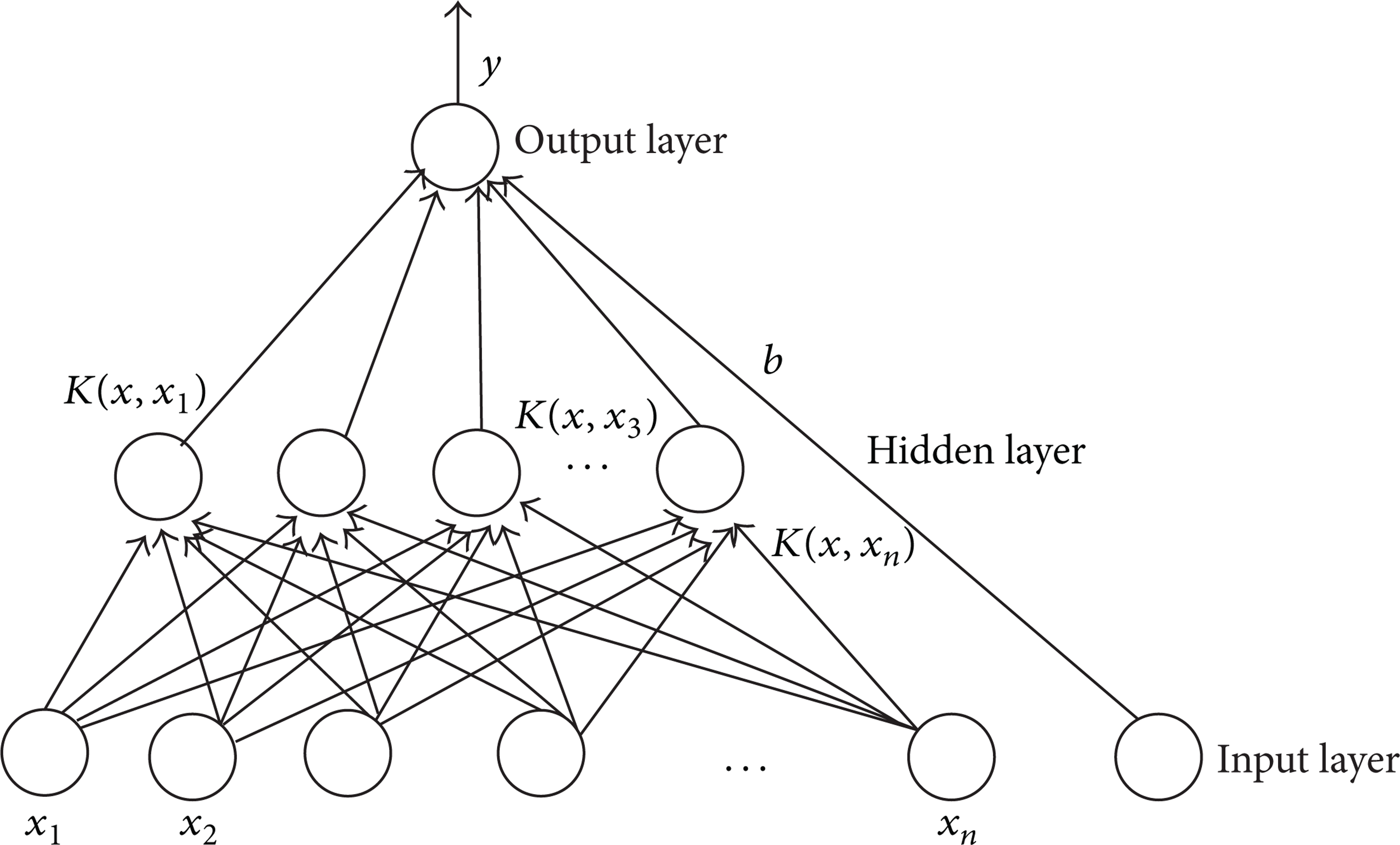
Identification network structure based on optimal LSSVM.
To identify a high-speed electric-hydraulic proportional system, an objective optimization function is built by LSSVM algorithm [15–17]:
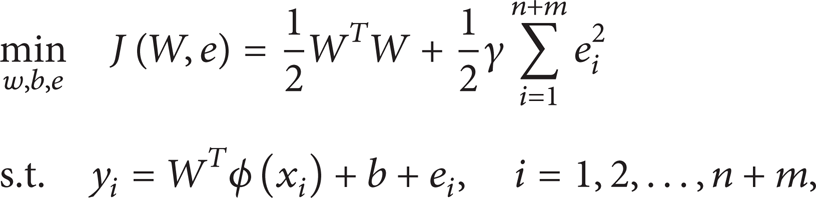
where φ(·): R n → R nh denotes mapping function of kernel space; W ∈ R nh and e i ∈ R denote weight vector and error variable, respectively; b and γ are bias variable and adjustable parameter, respectively.
Equation (3) is solved and the nonlinear predictive expression (4) is obtained:

Let K(x, x k ) be radial base kernel function:

Then nonlinear identification output is obtained:

LSSVM algorithm can obviously reduce the complexity of the original SVM algorithm because an optimization problem is transformed into a linear problem by linear equality constraints. At the time, LSSVM with radial base kernel function needs only to determine two parameters γ, σ; search space of the parameters is decreased from three dimensions of standard SVM to two dimensions, so LSSVM has faster modeling speed [18]. However it has two fatal flaws: its solution does not have sparseness, and the number of solutions is as many as sample data. So matrix dimensions can become curse as time goes on if all data need to be online fitted. To solve the problem above, we design a time-dependent Hankel matrix, and the Hankel matrix is embedded to identification modeling; thus finite dimensional solution is optimized on finite dimensional space [19].
Assume that time-dependent nonlinear system can be expressed as

And dth order inverse of the system can be expressed as

We introduce a error index as judgment basis function to reduce computational cost; formula (9) is met as computation run to k-step. Consider

The model is considered to be time-dependent if J > δ, where δ > 0, and δ is a small positive. Set the time window of training parameters to be M; input and output data of M objectives include two Hankel matrices; they are, respectively, used to identify and revise direct model and inverse model. Thus adaptive strategy can be used in condition of delaying M-step based on original model, so Hankel matrix for direct model of training samples is designed by

The following is used to construct Hankel matrix for inverse model:

At the same time, HH1 and HH2 constitute, respectively, support vector of direct model and inverse model. So direct model can be expressed by

where
Inverse model can be expressed by

where
Direct model and inverse model of nonlinear time-dependent objective are simultaneously adjusted by online LSSVM if the condition is not met. Block diagram of online identification is shown in Figure 2.

Block diagram of online identification of electric-hydraulic proportional system.
2.2. A Control Algorithm
Suppose that P is predication time-domain and M is control time-domain; closed loop output is obtained by adding a feedback:

Let

where q and r are weight coefficients. Quadratic objective function of predictive control receding optimization is calculated by minimizing J(k).
To obtain optimal control amount, we developed a receding optimization strategy based on genetic algorithm; this algorithm can obtain global optimization by biological evolutionism; control optimization step of genetic algorithm is as follows [20].
Step 1 (coding objective function variable). Both the control amount constraint and the speed constraint accelerating genetic algorithm are included in the code; the constraint of genetic algorithm is implemented by a block division method. We used binary code for genetic code; the genetic number of the individual represents control time-domain M. Assume that Δu denotes variation of control amount and genetic length L denotes accuracy of control variation; then individual length is ML; the negative maximum and the positive maximum of control variation are, respectively, represented by coding 00⋯0 and 11⋯1, individual genetic is equal to control amount, u(k + 1 − j). Individual genetic arrays into u(k), u(k + 1), …, u(k + n c − 1), n c denotes time domain. Small λ1 and λ2 are selected as the coefficients of adjusting control amount variation to ensure higher precision and better real-time performance in case of short code.
The first genetic value is selected as control amount variation; control amount is calculated by

Step 2 (determining population size Np). Population size and initial population will affect optimization solution of genetic algorithm; the larger population scale is, the higher diversity of population individual is, and optimization solution of the algorithm is better obtained according to the schema theorem, but the larger population scale may result in huge computation consumption. N p is determined by (17) according to the search space of global optimal solution in our study [20]:

Step 3 (selecting operator). A league selecting method is used for operator selection of genetic algorithm, that is, some individuals are randomly selected from the population, and the individuals of the highest fitness are saved to next generation; this process will not end until the individual number is equal to the set number. Conformity crossover operator is used to crossover operator of genetic algorithm.
Step 4 (determining termination condition). We used a absolute fitness method to determine optimal termination condition; the method is that the evolution is terminated as predetermined value of genetic fitness is reached. The optimization is not terminated until genetic fitness value is greater than Cmax − ∊, where ∊ is predetermined small value; optimization termination condition is determined again by the first genetic changing rate if termination condition is not suitable; that is, optimization is terminated if the convergence rate of ΔU(k) does not change.
The control approach and flow chart of high-speed electric-hydraulic proportional system based on a self-adaptive mixed strategy are shown in Figure 3. The online intelligent control structure is shown in Figure 4.
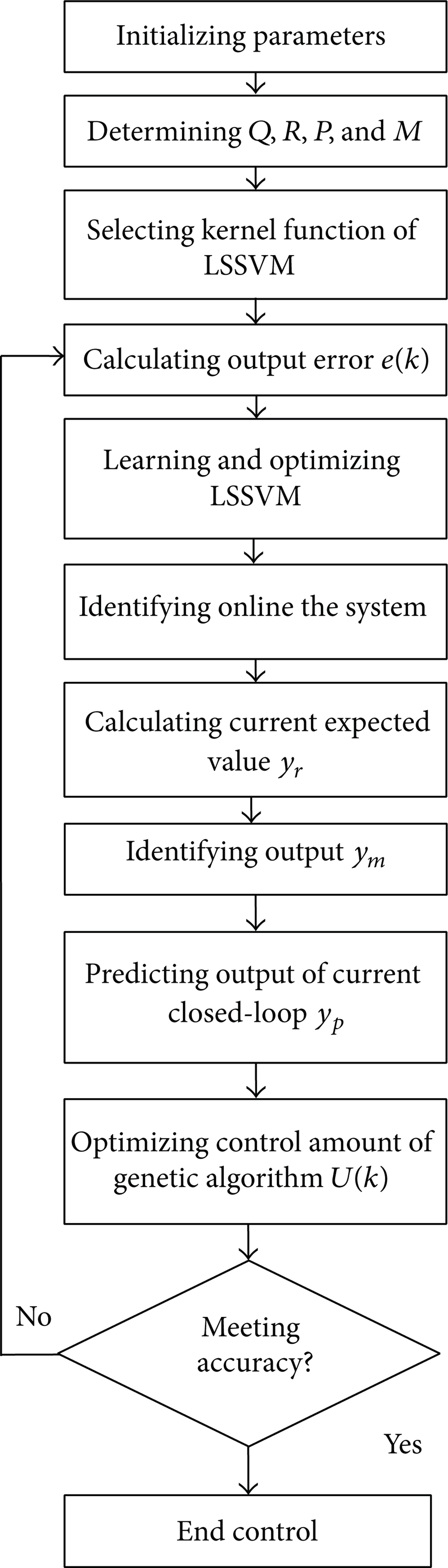
Control flow chart based on intelligent mixed strategy.

The online intelligent control structure based on self-adaptive mixed strategy.
3. Simulation Experiments
The dynamic characteristics of high-speed electric-hydraulic proportional system are simulated and analyzed based on the self-adaptive intelligent mixed strategy on Matlab platform; mathematical model of high-speed electric-hydraulic proportional control system was built before simulation at first [2, 21]; main simulation parameters are set as follows.
Valve flow-displacement gain K q = 8.5 m2/s, valve flow-pressure gain K ce = 2.0 × 10− 8 m3/(Pa·s), viscous friction coefficient B p = 1.98 × 103 kg/s, spring load rigidity k p = 5 × 104 N·m−1, bulk elasticity modulus β e = 8.0 × 107 Pa, flow coefficient C d = 0.61, fluid density ρ = 860 kg·m−3, and valve radial clearance c r = 5.5 × 10− 6 m. Set time-window T = 55.
In the example, the population size of genetic algorithm is thirty-two by calculating; each chromosome includes thirty-two dimensional vectors. The probabilities of crossover and mutation are 0.64 and 0.005, respectively, according to league selecting method. These parameters determine the control performances of the system; instability will occur if their values are too big, and it is difficult to search precise global optimization solution if their values are too small.
The simulation results are shown in Figures 5–13. Step response and error curve of step response based on the intelligent mixed control strategy for the high-speed electric-hydraulic proportional system are shown in Figures 5 and 6; sine wave response and error curve of sine wave response for the high-speed electric-hydraulic proportional system are shown in Figures 8–10; square wave response and identification trace for the high-speed electric-hydraulic proportional system are shown in Figures 9 and 10; step response, sine wave response, and square wave response based on a fuzzy control method for the high-speed electric-hydraulic proportional system are shown in Figures 11, 12, and 13.

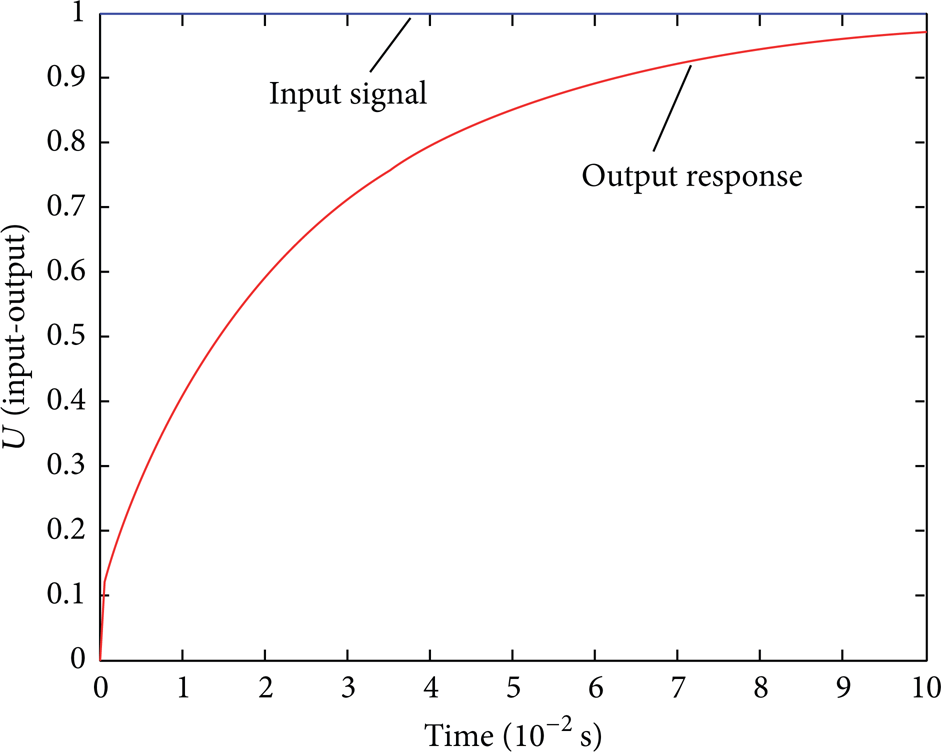
The step response based on the intelligent mixed control strategy.
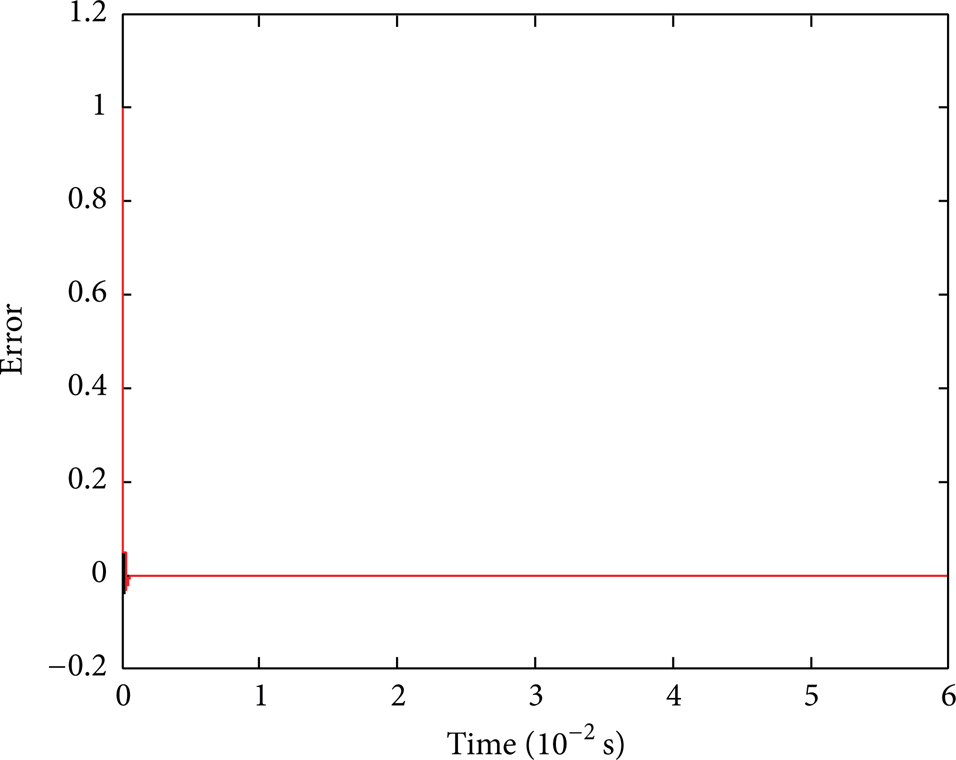
The error of step response based on the intelligent mixed control strategy.
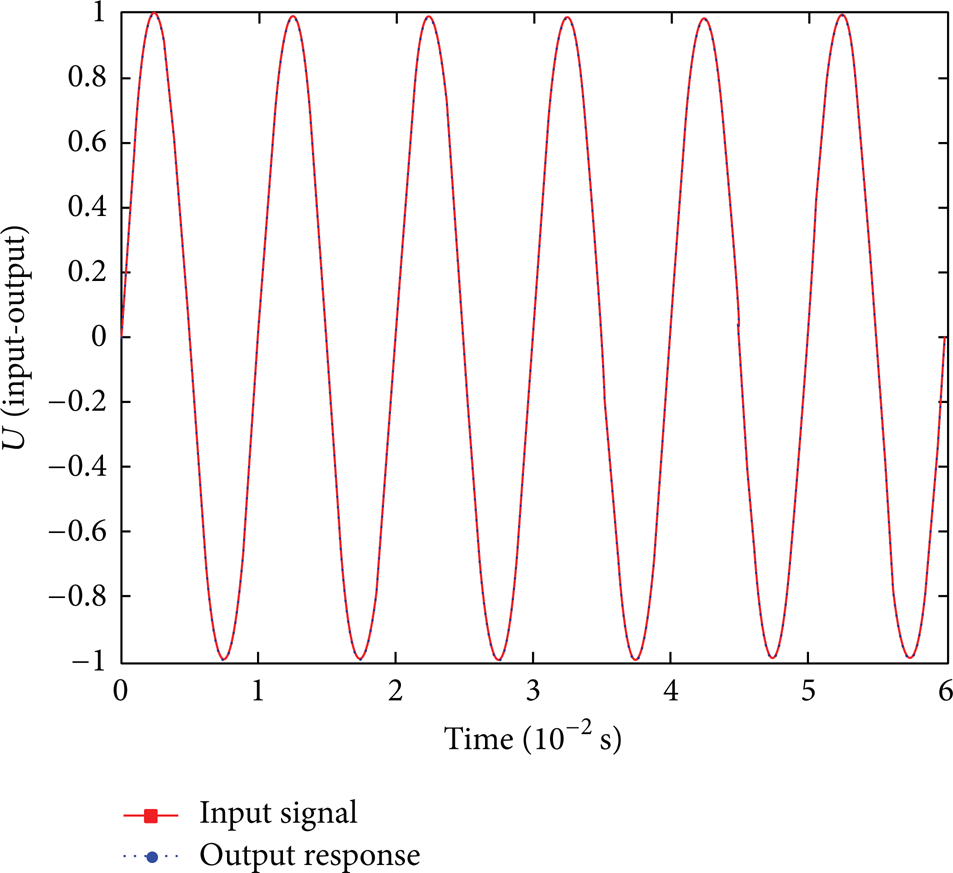
Sine wave response based on the intelligent mixed control strategy.

Error of sine wave response based on the intelligent mixed control strategy.
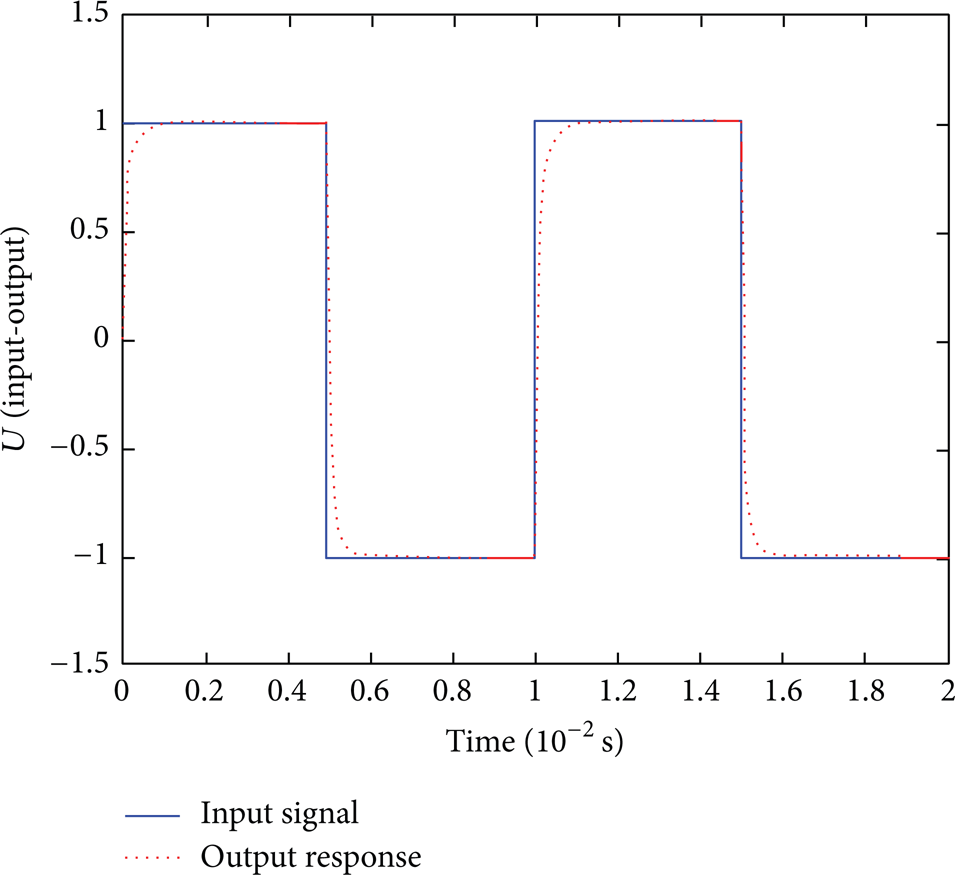
Square wave response based on the intelligent mixed control strategy.

Identification tracing of square wave response.
Step response based on a fuzzy control method.
Sine wave response based on a fuzzy control method.

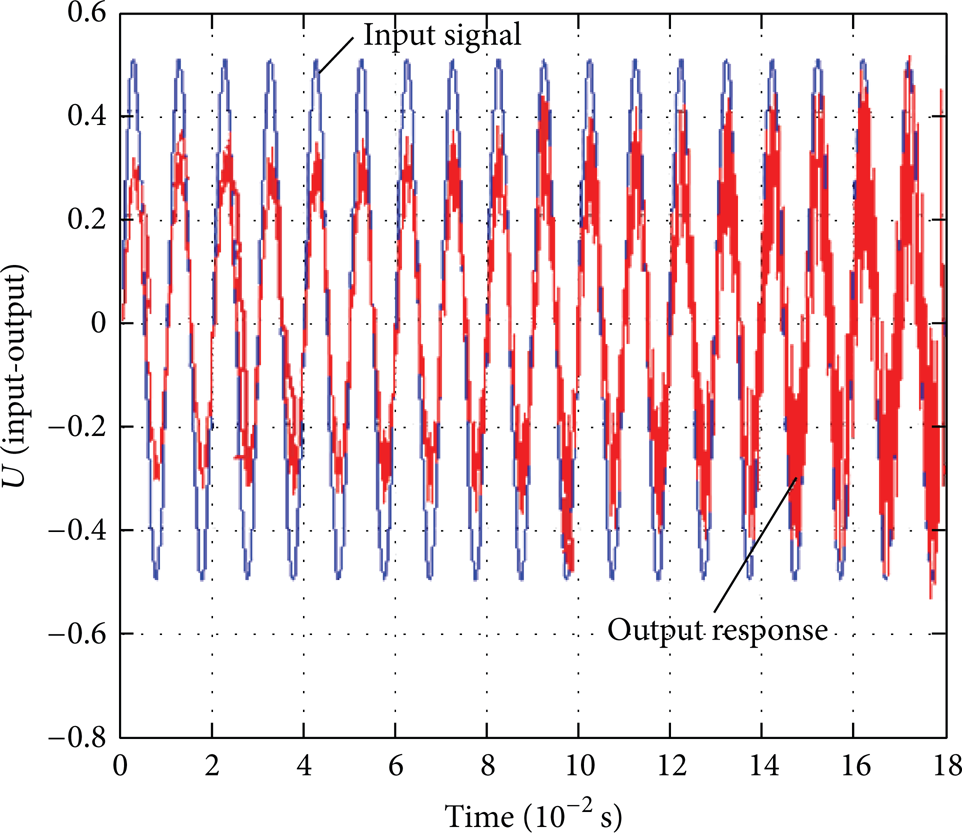
Square wave response based on a fuzzy control method.
From Figures 5–13, the simulation experiments show that dynamic characteristic of the high-speed electric-hydraulic proportional control system is improved greatly by the intelligent mixed control strategy.
Maximum overshoot, adjustment time, delay time, and rise time are decreased according to step response characteristics, and both the accuracy and the stability for the control system were increased, which is shown in Figures 6, 8, and 10. Frequency bandwidth is increased greatly; good tracking and stronger robustness are reached in condition of high frequency response, and it can meet the requirements of high frequency response above 100 Hz from the characteristics of sine wave response and square wave response, as seen in Figures 7, 9, and 10. Compared with a fuzzy PID control method, the intelligent mixed control strategy we proposed in this paper can improve the robustness, the stability, and the real-time of the high-speed electric-hydraulic proportional control system from Figures 11–13.
From the simulation results, it is clear that mixed control method based on the least squares support vector machine (LSSVM) and genetic algorithm has good optimization characteristics compared with the other control algorithm; it can overcome the oscillations caused by the sensibility and the uncertainty of the parameters. The optimization parameters can still be searched and control objectives can meet requirements even if initial control parameters are improperly selected. Genetic algorithm can avoid searching aimlessly the solutions because of its parallel implement and efficient heuristic search in solution space, which makes search ability is enhanced and optimization speed is fast.
4. Conclusion
A new intelligent mixed control strategy was proposed based on combining the support vector machine and genetic algorithm with genetic algorithm in this paper; at the same time, the time-dependent Hankel matrix was built on sample data; thus finite dimensional solution is optimized on finite dimensional space.
The simulation experiments show the satisfactory tracking effect by the fusion technology of a dynamic self-adaptive internal model control and a predictive control based on the support vector machine and genetic algorithm. The maximum overshoot, the adjustment time, the delay time, and a rise time are decreased, and both the accuracy and the stability for the control system are increased. Frequency bandwidth is increased greatly, good tracking and stronger robustness are reached in condition of high frequency response, and it can meet the requirements of high frequency response above 100 Hz. Compared with a fuzzy PID control method, the intelligent mixed control strategy we proposed in this paper can improve the robustness, the stability, and the real-time of the high-speed electric-hydraulic proportional control system.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This work is supported by the Natural Science Foundation of Zhejiang Province in China (no. Y14F020122), and is also supported by the Technology Plan Project of Zhejiang Province in China (no. 2012C21030). The authors thank the members at the Center for Advanced Life Cycle Engineering of the University of Maryland for their support of this work. The authors would also like to thank the anonymous reviewers who made constructive comments.