
Abstract
The target detection is a kind of very important application of wireless sensor networks. In this paper, we propose an energy effective distributed multisensor target detection method, which is different from the existing single sensor target detection methods, and target is detected by multisensor cooperation scheme. The first algorithm presents a method of the time series discretization to solve the distance of the target detected by the first connected node. The detected information is aggregated in the aggregating node, and the optimal path by the second algorithm is built up to transmit the aggregated packets to the sink. According to the simulation results, the probability of the single node target detection is compared with that of the multisensor collaborative target detection, and the influence of the weight coefficient on average node energy consumption is analyzed. Furthermore, we provide the optimal data sampling period of target detection data.
1. Introduction
The wireless sensor networks are composed of large number of sensors, which are in small volume and whose energy, processing ability, and transmission ability are limited. Through the wireless communication channels, these sensors form a multihop self-organizing network and integrate data acquisition, data processing, and wireless communication units in its small volume. At present, the application of wireless sensor network has gradually infiltrated into the military and multiple civilian areas. Compared with the traditional network, wireless sensor network is with the characteristics of large-scale, self-organization, and distributed computing and can be used in environmental monitoring, target detection, intrusion detection, information collection, and so on. In the target detection applications, the sensor node will transfer the detected information to the sink by single hop or multihop. It is very difficult to replace the battery, because the specified conditions of the monitoring area are restricted. Once the energy is exhausted or below the specific values of threshold, these sensors will die; this directly leads to disconnection of wireless sensor network and affects the monitoring performance. Therefore, energy efficient utilization of wireless sensor network becomes an important issue to deal with.
In order to carry out a longer time target detection task, how to utilize energy effectively, to ensure effective data transmission, and to prolong the network lifetime will be the key issues in the process of designing the network optimization algorithms or protocols. To solve this problem, sleep/wake-up mechanism is put forward in [1]. When no target enters into the detection area, a large number of sensors are in the sleep stage and few of the sensors are in the monitoring stage (wake up). Once the target enters into the detection area, a large number of sensors will be woken up to collect detection data and determine target location and trajectory by exchanging information. When the target enters into the detection area, awake sensors in sensing area cover detection area effectively. In addition, there are a lot of redundant nodes whose sensing areas are overlapped by other nodes and which contribute to too much energy loss [2]. It is very important to find an effective algorithm in order to schedule nodes effectively [3]. It is necessary to keep a certain number of nodes active to guarantee complete network coverage and reduce redundancy nodes to save network's energy consumption.
The accuracy of target monitoring and the energy consumption of network are greatly influenced by sampling period [4]. For example, the shorter the sampling period is, the more sensor nodes will detect the target and transmit detected information to the sink. Nodes create so massive redundant information that too much energy is consumed due to the similarity of the detected data. However, if the sampling period is too long, the target cannot be detected timely. The actual path and tracking path of the moving target will have great differences. All of the above factors request us to consider node sampling cycle properly when we design the algorithm. For each timeslot, energy consumption is mainly produced in the following several stages: (1) node perception, (2) detection information collection from the perception nodes to the cluster head, and (3) selection of the optimal aggregation and transmission path to from cluster head to sink. In this paper, we consider the energy consumption in stages (2) and (3).
The rest of this paper is organized as follows. Section 2 surveys related works. Section 3 presents the problem statement and the system models. Section 4 describes the scheme of target detection. Simulation results and analysis are provided in Section 5. Finally, Section 6 concludes this paper.
2. Related Works
Event detection and target tracking, two kinds of important issues in WSN, have attracted more attention. Event detection is one of the most important functions in wireless sensor networks [1, 5, 6]. A large number of sensors are deployed in the monitoring area to sense the change of the environment. For example, in environment detection at habitat, when the monitoring areas are intruded, sensors determine the position of the intruders and compute the probability that targets are detected. However, due to the sensor sampling error leading to inaccuracy in incident detection, numerous research works have presented regional event detection fault-tolerant algorithm [7]. But the existing fault-tolerant algorithms are based on spatial correlation of events. For example, in the forest fire monitoring, detection node information has a certain similarity before the fire arises. Once the fire appears, the local detection information exist a certain correlation, which is called as the space-time correlation [5, 8]. In the past target detecting process, sensor network usually collects the sample data of sensors by using fixed sink node. When the object is far from the sink, the sensor network collects data by the long distance communication among sensors [9, 10]. Therefore, the network needs to consume more energy. The sensor nodes located around the sink may exhaust out of energy, or even the lifetime of the sensor network is shorten because of the sensor forwarding data frequently.
In the target detection applications, the data collected from different sensors will be aggregated in aggregating node, which reduces the traffic among sensors and saves the energy of the sensor network. A Kalman filter algorithm presented in [11] is a type of optimization regression data processing algorithm which is used to estimate the position of the target's movement. The event detection method based on the time correlation is mentioned in [12], which uses statistical hypothesis test method, through verification of correlation between local sampling value data of sensor and event features expectations to realize event detection. In some studies, target detection algorithms proposed based on time/space correlation reduce the sensor nodes data exchange capacity, save energy effectively, and prolong the life cycle of sensor network. By combining network coverage degree and connectivity, target detection problem is addressed in [13]. By using geometry analysis method, the relationship of the sensing cover with the network connectivity is studied in [14].
In the target detection, the detection range of a sensor node is a circular field, and the center is this node and the radius is r. When the target appears in a detection range, it can be detected correctly [5]. However, due to the signal attenuation and the influence of noise, the sampled data of sensor is with a certain probability characteristic [1, 4, 5]. Therefore, even if the node and target are very close, it also cannot get the accurate test results. Under this kind of characteristic, the correct results of target detection probability (detection probability) and false alarm probability (false alarm rate) were introduced to describe the accuracy of target detection [5]. For example, for the arrangement of target detection system, it is required that the probability of the system to be correctly detected be more than 90% after the target appears, and the probability of detection alarm is given when the target which does not appear is less than 1%.
In order to overcome the limitations of the current literatures, in this paper, we propose a type of energy effectively distributed multisensor target detection method. Sensors in the network collaborate in order to monitor target moving. When the target enters into the detection area, nodes within the sensing radius will detect the target. This detection information will be aggregated at the node which is the nearest to the sink, and then the aggregated information is transferred to the sink. We compare the single node target detection probability with the multinode collaborative target detection probability by the simulation. In detection phase, the detection information is aggregated at the aggregating node, and then an optimal path is selected to transfer the aggregated packets of data to the sink. The simulation results show that multisensor collaborative detection can use the energy effectively and ensure the accuracy of detection.
3. System Model
3.1. Network Model
Sensor nodes are deployed randomly in two-dimensional (2D) square plane; the area of network is

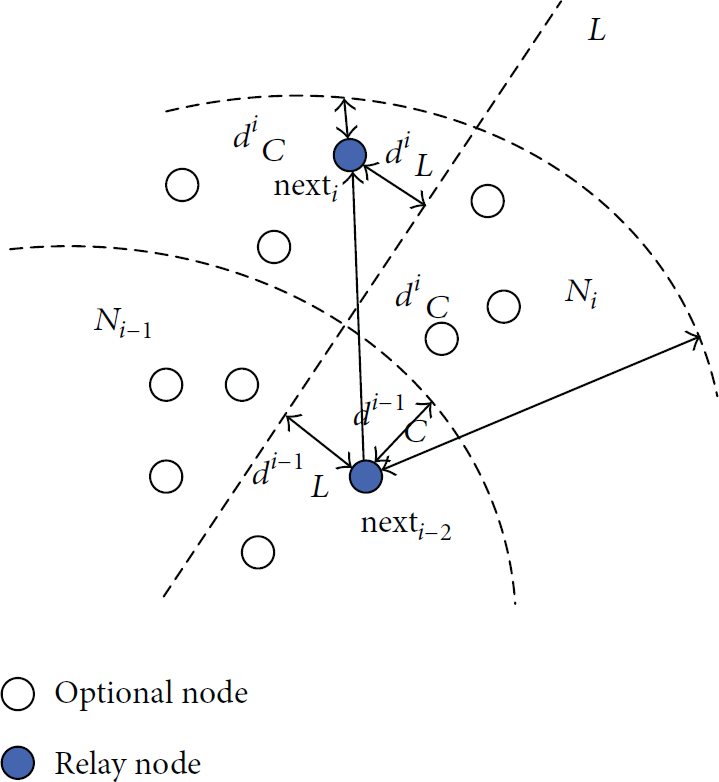
Target detection schematic diagram.
3.2. Detection Model
In existing literatures, once a target enters into the monitoring area, the target will be detected successfully. However, this is not true in the practical application. As the target detection schematic diagram shown in Figure 1, a target enters into the monitoring area from the origin of coordinates
We assume that the probability of target being detected is α when the target enters into sensor node detection area

This paper presents an energy effectively distributed multisensor target detection method which is different from the single node target detection method. For the single node target detection method, single sensor node detects the target and carries out the target tracking task. For the distributed multisensor, multiple sensors detect the target collaboratively, and these nodes communicate with each other to ensure the accuracy of detection. The measures in the process of implementation of detection and tracking of sensor nodes are as follows.
Moving distance D: the distance of the target moving is denoted by D. The maximum distance of target detected by nodes is denoted as ξ, where Detection probability
3.3. Energy Model
The detection nodes in communication range will send the detection packets to the aggregated node. The energy consumption of sending detection packets to the aggregated node is proportional to the square of the distance; that is, the energy consumption of detection nodes sending k bits data packet to the aggregated node of distance d is



4. Multisensor Target Detection Method
4.1. Target Detection Process
Sensor nodes are deployed in the two-dimensional plane. Generally speaking, the target enters into the detection area with speed v from the point (0,0). Detection nodes detect the target and transfer the detection information to the sink. As long as the target is in the detection area (a circular area, and detection node locates at the center and the radius is sensing distance), it may be sensed by the detection nodes. We usually estimate target moving state in the


Seek the maximum detection distance by Algorithm 1.
The steps of Algorithm 1 are illustrated as follows.
Algorithm 1.
Step 1. According to whether nodes are connected with the sink, we divide the detection nodes into two categories. The first category nodes are connected with the sink, and we denote these nodes by
Step 2. We divide time into a series of
Step 3. We calculate the distance of all the connected nodes from the target
Step 4. If
According to the ξ obtained by Algorithm 1, the probability of the target detected by single sensor is

Though we can calculate the target detection probability of single sensor easily, it is difficult to determine whether the nodes have detected the target or not quantitatively. Therefore, we give the node object detection the threshold value ϑ. When the probability of node detection is larger than the threshold ϑ, we confirm that node has detected the target.
As Figure 3 shows, the target enters into the detection areas


Seek the optimal transmission path by Algorithm 2.
4.2. The Optimal Data Transmission
When target enters into the detection area, all the sensor nodes within the sensing radius will detect it and form a circular detection area. In the process of target moving, the circular area of sensor detection moves with the direction of the target's movement. Choose the closest node near the target as the cluster head in each circular area and other nodes in the area as member nodes, and detection information is aggregated on the cluster head. Aggregated information is transmitted to the sink along one path such that the energy consumption is the minimum.
How to find the optimal path becomes a key issue. As shown in Figure 3, aggregating nodes seek the optimal path to transmit aggregated packets to the sink. Algorithm 2 shows how to select the optimal path. The specific steps of Algorithm 2 are given as follows.
Algorithm 2.
Step 1. Aggregating nodes determine the position of the sink, and we can get the straight path from aggregation node to the sink (using dotted line shown in Figure 3). Then the next-hop node of the aggregated node is selected on the path or on both sides of the dotted line.
Step 2. We choose the alternative set of nodes
Step 3. The node

As shown in Figure 4, we select the node
Aggregating nodes select the next-top node.
5. Simulation Results
The deployment of the sensor nodes is random on the two-dimensional square plane with area of
Related parameters.

Figure 5 shows the relationship between the maximum detection distance and the node's sensing radius. When the target enters into the detection area with the angle of incidence by 30 degrees, 45 degrees, and 60 degrees, respectively, according to Algorithm 1, we derive the relationship between the maximum detection distance and the node sensing radius. Since nodes are deployed randomly, the sink is deployed in the center of network and the nodes surrounding the sink have preferable connectedness; therefore, when the target enters into the detection area in 45-degree direction, the detection distance is less than that in 30-degree and 60-degree directions, and the simulation results obtained that the connectivity of network will be enhanced and the maximum detection distance of the target will decrease significantly when the node sensing radius increases.
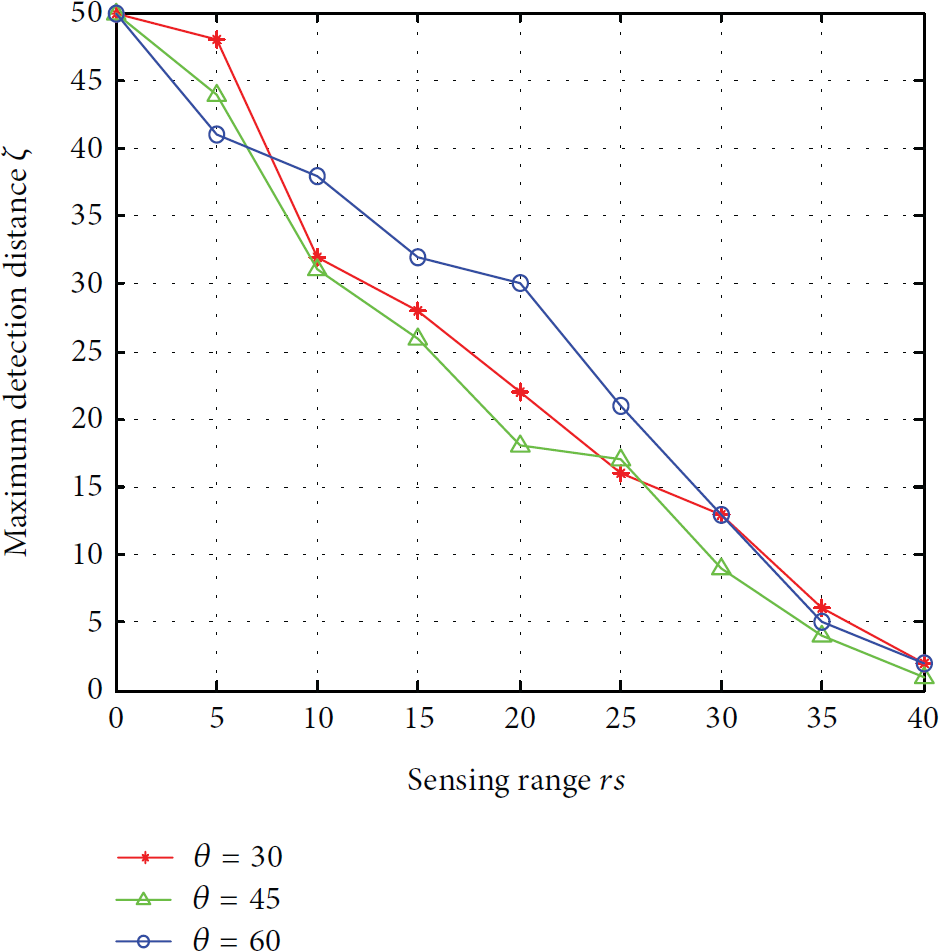
Maximum detection distance.
Figure 6 illustrates the comparisons of single target detection probability

Detection probability of target.
After the target enters into the sensing area of nodes, multiple sensors in the sensing area cooperatively detect target's movement, and the sensing data will be aggregated in the aggregating node which is the closest node near the target. According to Algorithm 2, we select the optimal path and choose the appropriate weighting coefficient for achieving the minimal average energy consumption of the nodes.
Figure 7 shows that the minimum of the average energy consumption of nodes is achieved when the weight coefficient α equals to 0.3. That is to say, in the process of the optimal path selection, the nodes surrounded in the maximum transmission radius should be chosen as the forwarding nodes, which are better than the nodes around the dotted line.

The relationship of weight coefficient and average energy consumption.
Figure 8 shows the relationship between the node sampling period in the case of

Energy consumption under the different sampling period.
6. Conclusions
In this paper, we present an energy efficient distributed multisensor node detection method in wireless sensor network when the target enters into the detection area from detection boundary with different incident angle. According to Algorithm 1, we propose a time dividing method, and the maximum detection distance of target's movement under different incident angles is calculated. Then, we compare the single node detection probability with multinode detection probability. The simulation results show that multinode detection probability is greater than the single node detection probability in the case of the same relevant parameters. After the target is detected, most of detection nodes in the detection region aggregate the detection information at the closest node near to the target and transfer the aggregated information to the sink along the optimal path by multitop mode. Furthermore, the relationship of the different sampling periods and the detection nodes energy consumption are compared. Also, this paper has two drawbacks. (1) Sleep/wake-up mechanism is not considered. If no target appears in the detection area, a large number of sensor nodes are in a dormant state and the boundary node is in working state. Once a node detects the target, the information will flood into the surrounding nodes, which will wake up the surrounding nodes. Thus, the communication protocol between the nodes should be revised. (2) We consider that the target enters the monitoring area only along a straight line; however, the target moves randomly in most cases.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is partially supported by the National Natural Science Foundation of China under Grant nos. 71271165 and 61373174, Guangxi Key Laboratory of Trusted Software under Grant no. kx201416, and the State Key Laboratory of Complex Electromagnetic Environmental Effects on Electronics and Information System under Grant nos. CEEME2012k0207B and CEEME2014k0302A and Grant no. 2011C14024 from Science and Technology Department of Zhejiang Province Program and Grant no. 2010R50041 from Key Innovation Team of Science and Technology Department of Zhejiang Province.