
Abstract
The industrial wireless network (IWN) is an important part of industrial CPS, which must address the key issue of reliable and real-time communication as well as the desired network lifetime. The nodes of IWN are usually fixed on the devices for better monitoring of the state information of the equipment and environment, while the relay node placement plays a significant role on network performance guarantee. This paper proposes an Integer Linear Program (ILP) placement strategy to meet the fault tolerance and survivability requirement. In addition, an edge coloring algorithm is proposed to solve the conflict of TDMA communication, which improves paralleled and real-time communication performance. Simulation results show that this placement strategy not only meets the requirements of robust communication and survivability, but also enhances real-time communication of IWN.
1. Introduction
1.1. Introduction of CPS
A cyber-physical system (CPS) is a system of collaborating computational elements controlling physical entities. Today, a precursor generation of cyber-physical systems can be found in areas as diverse as aerospace, automotive, chemical processes, civil infrastructure, energy, healthcare, manufacturing, transportation, entertainment, and consumer appliances. CPS will play a great role, especially in the industrial world. This generation is often referred to as embedded systems. In embedded systems, the emphasis tends to be more on the computational elements and less on an intense link between the computational and physical elements. The CPS has been studied by many foreign research institutions. The US National Science Foundation (NSF) has identified cyber-physical systems as a key area of research [1]. Starting in late 2006, the NSF and other United States federal agencies sponsored several workshops on cyber-physical systems [2–4]. Some scholars have studied CPS in China, and the representative papers can be seen in [5–7]. As the special WSN in the industry, IWN can be used as an important technology of CPS components. It has attracted more and more attention.
1.2. Industrial Wireless Network
IWN is specially designed for harsh industrial environment application, which has better network performance with respect to anti-interference, robustness, real-time, and security through the use of mesh network, spread spectrum, frequency hopping, and the multihop technique. The concept of IWN was firstly proposed by the U.S. Department of Energy (DOE), and it transformed other research which focuses of industrial automatic measurement and control field after the industrial field bus [8–10]. ISA SP100 [11], WirelessHART [12–15], and WIA-PA [16] are three IWN specifications which have some common features such as short-range multihop wireless communication, being battery-powered, and a TDMA scheme [17]. Although there are some distinctions on node definition for these three specifications, all the nodes can be divided into sensor node and relay node logically. Relay node must be scheduled in specified time slots to fulfill correspondent communication task.
In comparison to the random placement of a WSN senor node, the positioning of an IWN node is relatively fixed. As usual, the IWN node can be divided into sink node, relay node, and sensor node. There is little research on the sink node placement because it is usually fixed; sensor node placement primarily considers the probability-of-detection, data fusion, and accuracy [18, 19]. Tremendous attention has been paid to address the issue of relay node placement on the grounds that a relay node can be deployed flexibly; the relay node acts as a bridge between the sensor node and sink nodes; relay node placement strategy is distinct for different application requirements. Although we can use the AGV mobile robot or person with handheld devices to collect data, there is usually a limited number of mobile robots. People cannot use handheld mobile acquisition equipment to collect information in the harsh environment. The AGV mobile robot is not able to work in the limited space environment. In addition, the above two ways have a higher cost. So we hope that WSN can bear the bulk of the work, only allowing man or AGV to carry out regular inspections and verifications. A better node deployment strategy for the relay node can also provide fine-grained navigation for the AGV or mobile robot. By combining the two ways using IWN and AGV, it can be easier to complete the construction of an industrial intelligent environment. Therefore, we say that the deployment of the relay node is essential and important for research.
1.3. Related Work on Relay Node Placement
Hou et al. [20] extended the network lifetime by designing an heuristic algorithm (SPINDS) to solve optimized RN placement problem; experiments validated the effectiveness of this algorithm. Chen et al. [21] demonstrated that redundant fault-tolerant techniques improved query reliability and network lifetime, and it could be referred in RN placement. While Hou et al. [20] aimed to extend the network lifetime, but this work does not consider the reliable communication issue in hash industrial environments.
Wang et al. [22] tended to solve the issue of the minimum network cost relay node placement under the constraint of network lifetime and connectivity. This work firstly solved the minimum set cover problem without considering energy consumption. They also proposed three heuristic algorithms to solve the energy consumption constraint. Liu et al. [23] aimed at network coverage and connectivity based on transportation industry, and this work proposed a heuristic and network flow algorithm to deal with the relay node placement problem. Wang et al. [22] and Liu et al. [23] were typical relayed node placement research under constraint of network coverage, connectivity, and lifetime, but they did not consider fault tolerant issue in hash industry environment.
Bredin et al. [24] established k-connectivity network to improve fault tolerance by
Bari et al. [33] focused on
Bari et al. [36] presented the formal description of ILP, and this work had improved the network fault tolerance by
Sun et al. [43] addressed an
1.4. Research Feature and Paper Arrangement
Although spread spectrum, frequency hopping, and the TDMA technique improves IWN reliability to some degree, this network still has some deficiencies such as being battery powered and short distance communication. Moreover, there are electromagnetic interference, multipath effects, and other wireless signal interference, all of which make it easier for communication to fail. Therefore, this paper focuses on improving the fault tolerance ability and network lifetime of IWN. In addition, IWN also needs to focus on real time communication because monitoring information should be delivered within the required time [44, 45]. However, when network scale increases, the communication resource utilization of TDMA technique decreases greatly, which will affect real-time communication. This paper also seeks to enhance real-time communication through paralleled communication.
The main contribution of this paper is (i) presenting a comprehensive constraint and formulation about fault tolerance, energy consumption, and real-time issues, (ii) proposing a heuristic algorithm to calculate paralleled communication resources according to objective function, (iii) simulation experiments to show the influence of other parameters on real-time performance and validate that the proposed relay node placement strategy can improve real time performance while guaranteeing fault tolerance and energy limitation, which is firstly proposed in related research.
2. Network Model and Formulation
2.1. Network Model
This paper considers two-tiered IWN model, in which lower-tiered is sensor nodes distributed in sensing area or above sensing object to gather required data [18]. It assumes the sensor nodes have been deployed in predetermined position, and the potential position of relay node has also been determined using grid met
The objective is to obtain the position of relay node to achieve minimum edge coloring under the following requirement: (i) the relay node has fault tolerance coverage to sensor node, and the communication among relay nodes is still fault tolerant; (ii) meet the requirement of network lifetime and energy consumption; (iii) the degree of node is balanced to improve paralleled communication performance.
Since there is data collection period of IWN (in one period all the data collected from sensor node must be transmitted to base station), another two objectives of this paper are to shorten the period time and to reduce the communication resource usage in one period.
This RN's placement strategy is specially designed for the IWN of industrial application, where the location of node does not change frequently and the network control information is distributed by the network manager through message advertisement; thus this strategy is not suitable for such application whose network topology changes frequently.
2.2. Parameter Definition
The following notation is the input constant in ILP formulation:
x: the number of sensor nodes, and every sensor node has an index y: the number of potential RN positions with a unique index for each position j, β: energy coefficient for amplifiers; s: path loss rate; D: a large constant, the maximum allowable energy consumption of each RN in one period. The following notation is the input variables:
the number of bits forwarded by
2.3. ILP Formulation
In this section, ILP formulation is proposed, which should guarantee that the
The objective function is as follows:
transmission range constraints
fault tolerance constraints
energy consumption constraints
real-time constraints














2.4. ILP Formal Specification
Formula (1) is the objective function, which must achieve minimum conflict edge coloring under certain constraints as follows. The transmission and coverage constraints are in formulae (2) and (3). Formula (2) means that the transmission range is longer than Euclidean distance among
Network coverage, connectivity, and fault tolerance between
Energy consumption constraints are in formulae (8), (9), (10), (11), (12), and (13), which focus on limiting energy use in one period. Formula (8) means the total number of bits generated by sensors' nodes within the transmission range of
Node degree constraints are in formulae (14) and (15), which seek to limit the number of neighbors to balanced level. Parameter a, b, and T can be adjusted according to the practical situation.
3. Solution
3.1. Solution Explanation
The solution is divided into two parts. The first part is to calculate all the topologies that meet fault-tolerance and energy consumption requirements; the second part is to find a placement topology with the lowest level of conflict edge coloring from the result in the first phase.
The algorithm running time depends on the number of binary variables, including
3.2. Calculating the Fewest Number of Conflict Edge Coloring
There are two sorts of communication conflicts in IWN, which are direct conflict and indirect conflict. For direct conflict there are three kinds; the first is that a node cannot receive and send data simultaneously; the second is that a node cannot receive data from two neighbors simultaneously; the third is that a node cannot send data to two neighbors simultaneously. To avoid direct conflict, the algorithm must allocate different communication resources for such conflict links. For indirect conflict due to channel sharing, the solution must meet some interference constraint model; the node will interfere with all its neighbors when it is sending data and this situation must be considered in the communication resource scheduling.
In IWN, the valid communication resources are restricted; thus if using a traditional communication resources scheduling technique, the above conflicts will make network channel utilization low, which will reduce the network throughput, increase transmission delay (real-time performance), and have a negative impact on large network scale applications. Therefore, if taking advantage of short distance wireless communication, paralleled communication can be used to schedule same communication resources to such links that do not conflict with each other. Then the network throughput and real time performance can be improved.
We transform the original graph into a link conflict graph according to the communication conflict principle. The conflict edges in the original graph become vertexes in the link conflict graph, and then vertex coloring is conducted in the link conflict graph to obtain the lowest coloring level. There are many vertex coloring algorithms: the backtrack, branch bounding method is accurate but high in time complexity; the greedy algorithm is low in running time but the results are normal; the intelligent algorithms like neural network and genetic and ant-colony optimization; the DNA algorithm can obtain preferable results, but the algorithm itself is very complex, the running process is randomly, and the running time is long. In this paper, a maximum degree first heuristic algorithm is proposed on the basis of the Welsh Powell algorithm. The following are some explanations and algorithm steps.
For a graph (
Vertex coloring corresponds to vertex set partition. If π is
Theorem 1.
For any G,
Demonstration. Mathematical induction is used for vertex number n of G, when
Since the solution seeks to obtain the lowest level of vertex colors, firstly the heuristic algorithm uses one color for as many vertexes as possible; obviously these vertexes must not be mutual neighbors. It is the same with the following process. The algorithms first find the maximal independent set, and the entire vertex in this set is given the same color. Then the second maximal independent set till the entire vertex is given a color. Since there is no unique result for this method, we must try to find a better result, which is an NP complete problem. However, we can infer that the degree of one vertex is larger, its influence to other vertexes is greater. Thus this algorithm gives higher priority for such a vertex with a large degree, which can reduce the influence. This is the idea of Welsh Powell algorithm. Figure 1 outlines our algorithm steps.

Coloring algorithm flow chart.
4. Simulation Experiment and Result
In simulation,
In order to focus on the key point the distribution of relay nodes, we do not conduct practical sensor placement like in Zhang et al. [18], but we use random placement strategy. The whole network area includes 3 different sizes,
The simulation programs run on a desktop with Intel Core i3 3.30 GHz CPU and 4 G RAM, and the experiment environment is Matlab R2010B. The main goal is to find the lowest level of edge coloring
4.1. Network Performance without Real-Time Constraints or Energy Constraints
(
1) Single-Connected Topology (
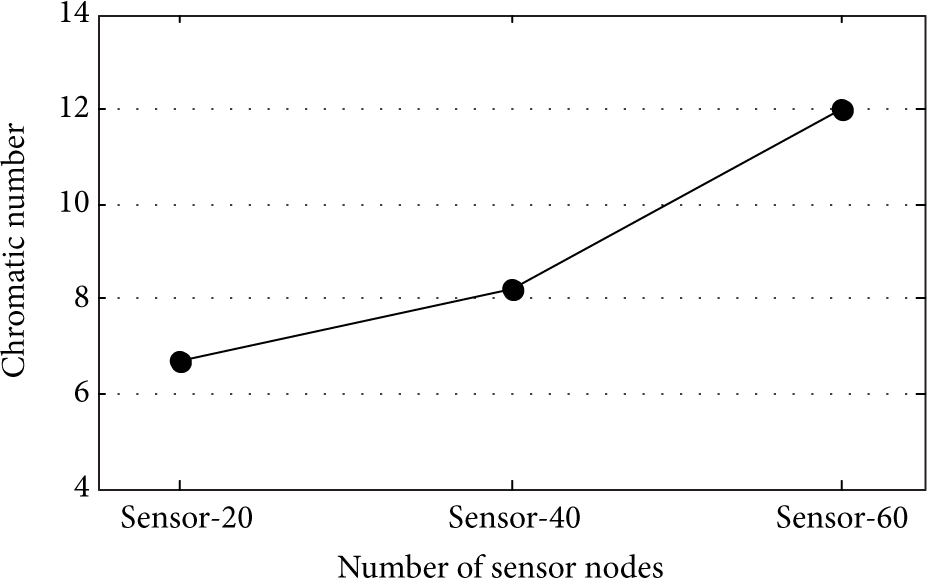
Comparison of chromatic number of 40-sensor topology under different relay node schemes, when
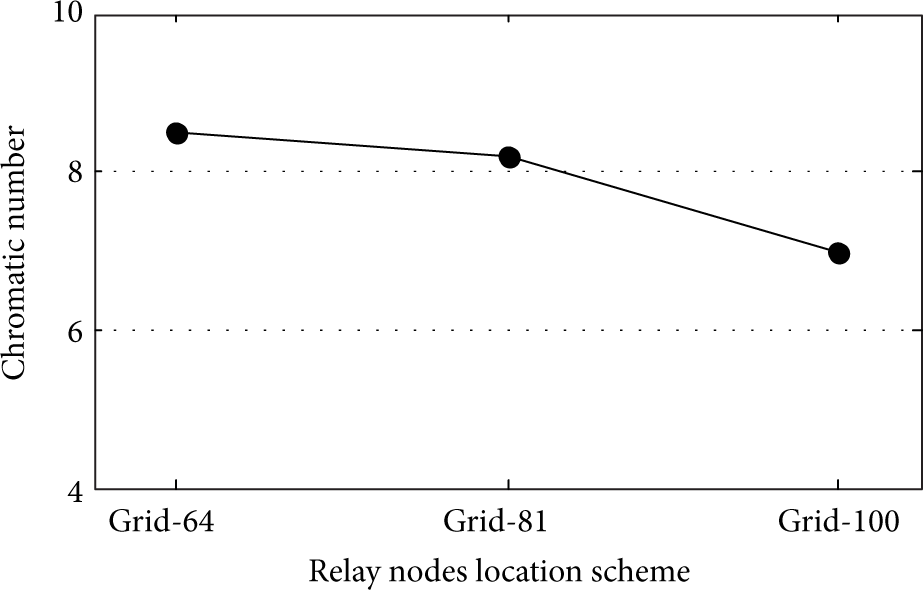
Comparison of chromatic number of different topologies under 81-Grid relay node scheme, when
(
2) Multiple-Connected Topology (
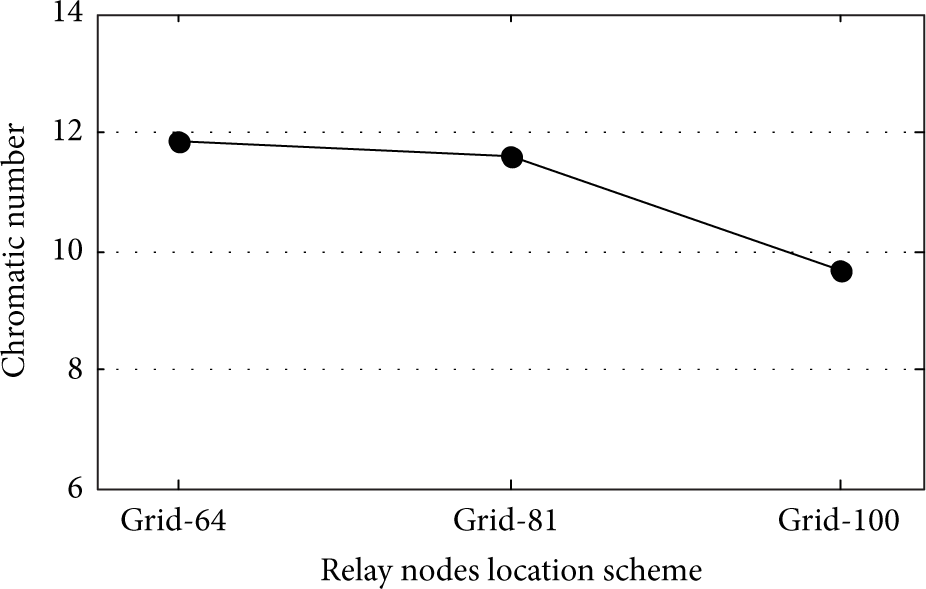
Comparison of chromatic number of 40-sensor topology under different relay node schemes, when

Comparison of chromatic number of different topologies under 81-Grid relay node scheme, when
Comparing Figure 2 with Figures 4, 3, and 5, respectively, the following conclusions are made: (i) no matter if the topology is single-connected or multiple-connected, the network real-time performances have almost similar trends of change under same effects (different number of sensors or different size of network area); (ii) the real-time performance of a multiple-connected topology is much worse than the performance of a single-connected topology, since there are no constraints to control the multitude of additional redundant backup paths; therefore the probability of collisions in the network raises.
4.2. Network Performance without Real-Time Constraints but Energy Constraints
The strategy of energy constraints is to limit the maximum energy cost per round of nodes to prevent the early appearance of dead nodes. In this experiment, set-up three, different levels of energy constraints are used, RE-Level 1 (Restricted Energy, Level 1) is the most relaxed with
Figures 6 and 7 show the network real-time performances of single-connected topology and multiple-connected topology, respectively, when energy constraints are included. Contrast the chromatic numbers of topologies which have the same number of sensors and the same size of network area but different RE-Levels; the real-time performances show almost no change. This means that energy constraints alone cannot improve the real-time performance of a network.
Comparison of chromatic number of different topologies with energy constraints under 81-Grid relay node scheme, when

Comparison of chromatic number of different topologies with energy constraints under 81-Grid relay node scheme, when
4.3. Network Performance with Both Real-Time Constraints and Energy Constraints
Real-time constraints will limit the degree of each node and the standard deviation of the degrees of all the nodes in a network. Network topology can distribute all the data flows as equally as possible with real-time constraints, so both lifetime and real-time performance of the network will improve. Here, besides some real-time constraints, fault-tolerance (
According to formulae (14) and (15), node degree
The effects of

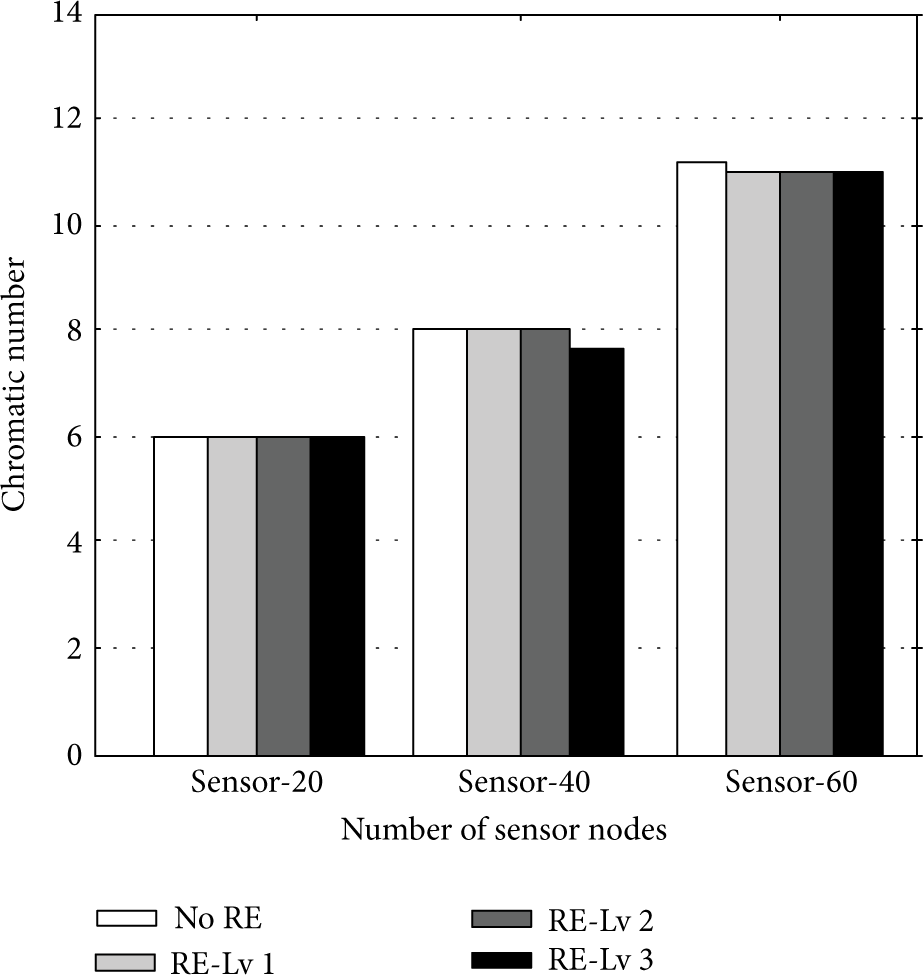
Comparison of chromatic number of different topologies with energy constraints and real-time constraints under 81-Grid relay node scheme, when

Comparison of chromatic number of 40-sensor topology with energy constraints and real-time constraints under different relay node schemes, when
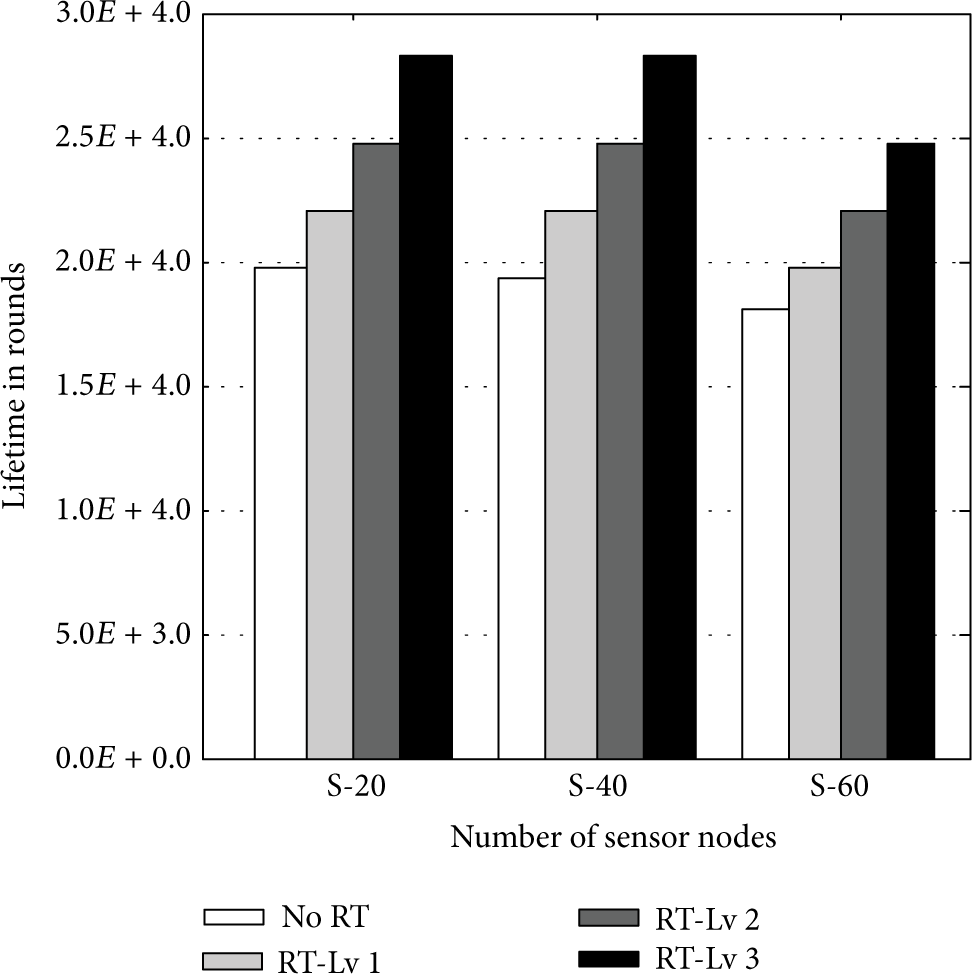
Comparison of lifetime of different topologies with energy constraints and real-time constraints under 81-Grid relay node scheme, when

Comparison of lifetime of 40-sensor topology with energy constraints and real-time constraints under different relay node schemes, when
Figures 12 and 13 compare the number of relay nodes required by the proposed approach under different real-time constraint levels. It can be seen from these two figures that, on the whole, the number of relay nodes required is stead, and increases very slightly when the real-time constraint level raises. Comparing Figures 8 to 13 comprehensively, the results indicate that the proposed approach improves the network performances significantly with very slight costs (number of relay nodes required).

Comparison of number of relay nodes required of different topologies with energy constraints and real-time constraints under 81-Grid relay node schemes, when

Comparison of number of relay nodes required of 40-sensor topology with energy constraints and real-time constraints under different relay node schemes, when
Figures 14 and 15 show the performance comparisons for the following cases: (i) ILP with no constraints (the left-most bar in each group, indicated by “ILP-ALL” [36]), (ii) ILP with fault-tolerance (the second bar from the left in each group, indicated by “ILP-RED” [36]), (iii) ILP based approach with fault-tolerance and some energy constraints (the third bar in each group, indicated by “ILP-Bari” [36]), and (iv) an approach with some real-time constraints based on (iii) (the right-most bar, indicated by “ILP-ZH”). Figure 14 compares the number of relay nodes required for different approaches and shows the results of real-time performance comparison.
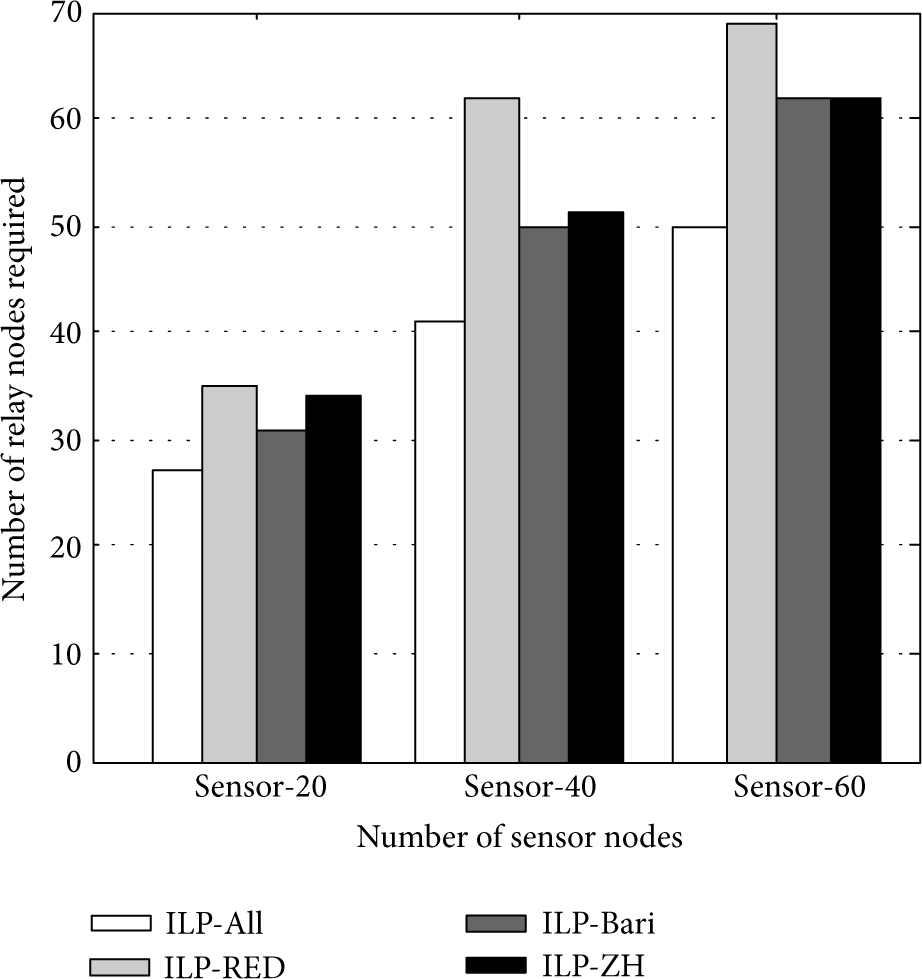
Comparison of number of relay nodes required by different approaches.

Comparison of chromatic number under different approaches.
As shown in Figure 14, ILP-ALL requires the least number of relay nodes for all networks. This is expected, because ILP-ALL always generates a solution with the greedy algorithm. ILP-RED requires the most relay nodes, since fault-tolerance is considered but without other constraints, and the number of paths will simply be double in the network. As energy constraints are included, the ILP-Bari requires more relay nodes than ILP-ALL and less nodes than ILP-RED.
The main idea of the real-time constraint is to balance the data flows and energy costs in the whole topology; thereupon collisions and the lifetime of the network will be improved. In such cases, the number of required relay nodes obtained by the proposed approach may be higher than some other approaches (this is shown in Figure 14). However, when incorporating Figure 15 with Figure 14, the results illustrate that the number of required relay nodes is an inevitable cost to improve the whole performance of the network. The chromatic number of the proposed approaches is obviously less than other approaches (sometimes the ILP-ALL could also obtain the least chromatic number but the whole performance cannot reach the proposed approach, e.g., lifetime), which means collisions in the network are definitely controlled. This proves that industrial WSN could achieve a link fault-tolerance, node energy constraints, and preferable real-time performance within the proposed approach.
5. Conclusion
In IWN, except for fault tolerance and energy consumption constraints, real time performance is also important but is easily ignored. Since the position of IWN nodes is usually fixed in reality, the network real time performance is also determined after topology placement. Thus this paper considers fault tolerance, energy consumption, and real time performance of IWN and presents a formal description of the problem of
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Grant no. 61202042), China-Canada Joint Research Project (Grant no. 2009DFA12100), the Fundamental Research Funds for the Central Universities (Grant nos. SWU113066, XDJK2015C023, and XDJK2012C019), and the Scientific Research Foundation for the Returned Overseas Chinese Scholars, State Education Ministry of China.