
Abstract
Camera robots are high-speed redundantly cable-driven parallel manipulators that realize the aerial panoramic photographing. When long-span cables and high maneuverability are involved, the effects of cable sags and inertias on the dynamics must be carefully dealt with. This paper is devoted to the optimal cable tension distribution (OCTD for short) of the camera robots. Firstly, each fast varying-length cable is discretized into some nodes for computing the cable inertias. Secondly, the dynamic equation integrated with the cable inertias is set up regarding the large-span cables as catenaries. Thirdly, an iterative optimization algorithm is introduced for the cable tension distribution by using the dynamic equation and sag-to-span ratios as constraint conditions. Finally, numerical examples are presented to demonstrate the effects of cable sags and inertias on determining tensions. The results justify the convergence and effectiveness of the algorithm. In addition, the results show that it is necessary to take the cable sags and inertias into consideration for the large-span manipulators.
1. Introduction
In the recent years, redundantly cable-driven parallel camera robots (camera robots for short, see Figure 1) have been developed for the increasing requirements of the aerial panoramic photographing [1]. Besides the camera robots, rocker cameras, crank arm lift trucks, and helicopters are often employed for the aerial panoramic photographing. However, rocker cameras and crank arm lift trucks suffer from the limited shooting angles and interrupt audience's view of scene; helicopter shootings are subject to the vibration, noise, and expensive cost. Thanks to the camera robots, it is easy to take pictures from some perspectives that a conventional camera cannot achieve [2], leading to the convenient realization of the large range of aerial panoramic photographing.

Schematic of a camera robot configuration.
When a camera robot works normally, its speed and acceleration may be considerately great. Thus, a proper and exact OCTD is essential for guaranteeing its stable operation. Many researchers have investigated the OCTD problem. Hassan and Khajepour [3] presented a method based on convex theory for the OCTD. Pott et al. [4] developed a closed-form OCTD algorithm. Borgstrom et al. [5] computed the safe tensions through a linear program by introducing a slack variable. Gosselin and Grenier [6] presented a noniterative algorithm of OCTD. But all of these OCTD algorithms are not applicable to the camera robot. Furthermore, the cables in the above literature are all regarded as massless straight lines due to the small-dimension size of the manipulators. For a camera robot, this assumption is invalid owing to the sags caused by the nonnegligible self-mass of the large-span cables [7]. The effects of the cable sags on the kinematics and dynamics must be taken into account for large-span cables [8–13].
Yao et al. [14] approximated the catenary as a parabola for a four-cable-driven parallel manipulator of the large radio telescope. Gouttefarde et al. [15] explored a simplified approach for the large-dimension cable-driven manipulator. Du et al. [16] presented a simple dynamic modeling approach of large workspace cable-driven parallel manipulators. However, these works only involve the end-effectors’ inertias without taking cable inertias into consideration. Du et al. [17] studied the large-span cable dynamics through the finite element method. Nevertheless, the cable inertias are not considered completely due to the slow motions and the manipulator is not driven redundantly. For a large-span cable-driven manipulator, it cannot achieve the desired control effects for force or force/position control without considering cable inertias and sags, especially in the case of high-speed motions.
Compared with the manipulators in the above literature, the camera robots offer three obvious features. (1) Due to the large-span cables, the sags must be taken into consideration. (2) Because of the high maneuverability, the cable inertias cannot be ignored. (3) Owing to the redundant actuation, the tension distribution among the cables does not have the unique solution. The three features lead to a difficulty in determining the OCTD, which motivates the research on the OCTD of the camera robot in this paper. Since the cable sags and inertias have all nonnegligible effects on dynamics, we establish the dynamic equation combined with both the cable sags and inertias. In order to find the unique solution to cable tension distribution, an iterative optimization algorithm is introduced based on the dynamic equation.
The paper is organized as follows. Section 2 describes the camera robot. The dynamic equation of the camera robot is set up in Section 3. In Section 4, an optimization model for the cable tension distribution is established. In Section 5, an iterative optimization algorithm is introduced. Section 6 verifies the effectiveness of the algorithm and illustrates the necessity of taking the cable sags and inertias into account. Finally, Section 7 concludes this paper.
2. Description
2.1. Description of the Camera Robots
In order to fully control the motion of a camera robot, redundant actuation must be employed [18]. The camera robot structure is displayed in Figure 1, consisting of a moving camera platform with 3 translational DOF driven by four cables. The four cables are connected to the four pulleys, which are attached to the ceiling of masts, respectively. The camera platform moves freely in any direction because the cables can be shortened and lengthened controlled by four servomotors according to the commands sent from the central controller.
By means of a composite hinge structure, the demand for translation and rotation decoupling of the camera platform can be satisfied, so the camera platform can look like an ideal mass point. A global fixed frame, noted as {Oxyz}, is attached to the ground as shown, where O is the origin point.
2.2. Catenary Equation of the Cable
In order to guarantee the normal work of the camera robot, the cables must offer high strength and elastic modulus. As a result, the cables are inextensible. As shown in Figure 2, a local cable frame, noted as {o
i
s
x
i
s
z
i
s
}, is attached to
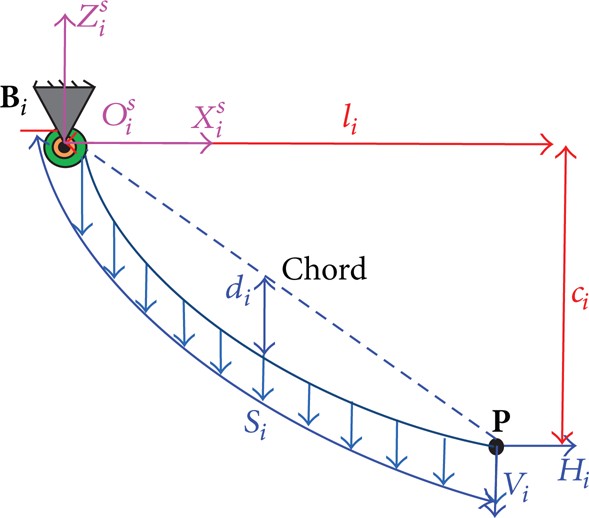
Catenary cable i in its vertical plane.
The catenary equation can be applied for describing the profile of the cable under the sag influence. When the camera robot works normally, the camera platform moves stably. As a consequence, the profile of the cable i is the catenary within the o s x s zs plane, which can be expressed as follows [19]:

where x
i
s
and z
i
s
are x- and z-direction coordinates in {o
i
s
x
i
s
z
i
s
}; ρ is linear density of the inextensible cable; g = 9.8 m/s2 is the gravitational acceleration with the direction along the negative direction of the z-axis; α
i
= sinh−1[β
i
(c
i
/l
i
)/sinhβ
i
] + β
i
, β
i
= ρgl
i
/2H
i
; H
i
and V
i
are the horizontal and vertical components of each cable tension at the cable end
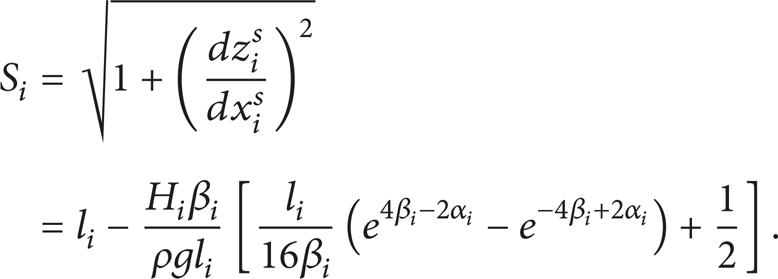
The corresponding sag d i is

It can be found from (3) that the sag depends on H i . In practical applications, the sag-to-span ratio is often employed for evaluating tautness of the cable. In order to ensure the normal work of camera robot, the cable should be kept as taut as possible. Namely, the sag-to-span ratio is as small as possible.
3. Dynamics of the Camera Robot
3.1. Dynamics of a Fast Varying-Length Cable
As shown in Figure 3, the cable is equally divided by n nodes with the cable length S
i
. Thus, the distance between any two adjacent nodes r
i
= S
i
(t)/(n − 1), in which S
i
(t) is the time-varying length of the corresponding cable i. Let {B
i
s
i
} be the curve length frame of cable i, in which s
i
is the curve length away from

A cable with the discrete nodes.
As shown in Figure 4, the motion of p
ij
is composed of the spatial motion and the axial motion with the cable length variations [16]. Due to the high maneuverability of the camera robot, the cable lengths change rapidly. Hence, the cable's axial velocity and acceleration cannot be ignored, leading to the nonnegligible inertia. For simplification,

where

The motion of p(s ij ,t) on cable i.
The velocity and acceleration of the node p
ij
can be calculated by taking the first and second derivatives of

where

where

where

By noting that ∥ds
i
/r
i
∥ = 1,

where
3.2. Dynamic Equation of the Camera Robot
The cable tension

where

where

where

Components of a cable tensionat the cable end
4. Optimal Model of the Cable Tension Distribution
4.1. Cable Tension Distribution Equation
Because the camera robot is a redundant driven mechanism, the structure matrix

where


where

Thus, the cable tension of cable i at the cable end

4.2. Constrained Conditions of the Optimization Model
In order to ensure the normal work of the camera robot, the tension T i must meet the following condition:

where the lower bound of the cable tension T min is required to keep cables taut, whereas upper bound of the cable tension Tmax is limited by the output torques of the servomotors and the maximum tension of the cable can withstand without breaking.
Substituting (13)–(17) into (18) yields the following expression:

where λ i t is the range of λ satisfying (18). Since the camera robot has four cables, (20) consists of four expressions. Hence, the range of λ is expressed as

A significant measure to ensure that the camera robot works normally is to keep the cables taut, which can be guaranteed through making the sag-to-span ratio q i meet the following condition:

Substituting (3) and (13)–(17) into (21), the range of λ is expressed as

where λ i d is the range of λ meeting (21). Similar to (20), (22) also comprises four expressions. Hence, the range of λ is expressed as

Combining (20) and (23) gives the following expression:

where
4.3. Optimal Model of the Cable Tension Distribution
It can be known from (15) that the homogeneous solution
For the stable operation of the camera robot, a severe deviation must be avoided. Thereby, a reasonable cable tension distribution is to make the tension deviations as small as possible. Consequently, the stable operation of the camera robot may be anticipated. Thus, the minimum variance can be used as the optimal object. If (12) and (24) are the constraint conditions, the optimization comes out a constrained optimization. Mathematically, the optimal model of the constrained optimization can be expressed as follows:

where H
i
= H
s
i
+ Nλ, E(

where α1, α2, and α3 depend on H i and N i . The optimal solution λ* can be figured out with the following 3 types:

where r i * = − α2/2α1 [20].
5. An Iterative Optimization Algorithm of the Cable Tension Distribution
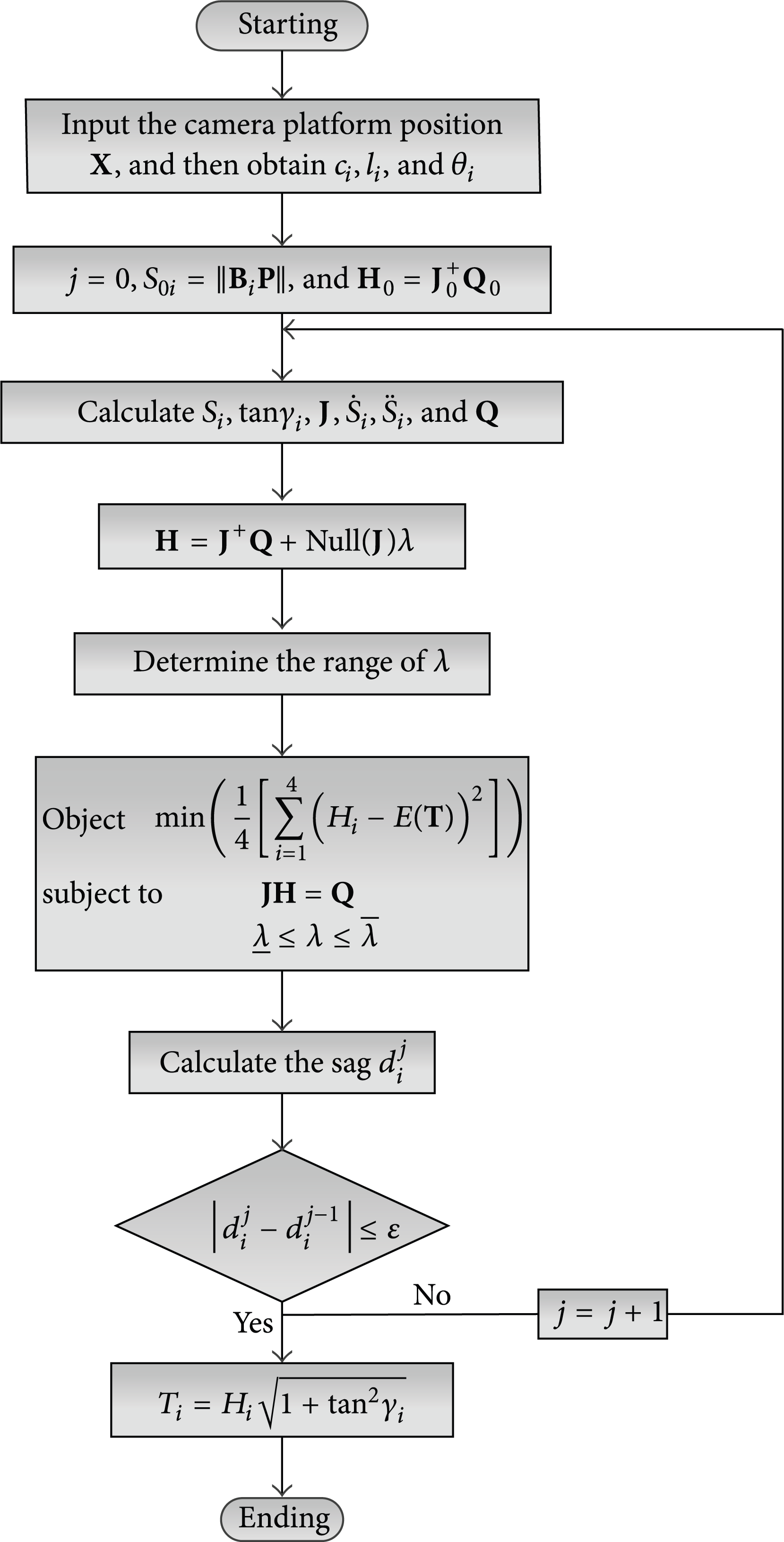
Equation (12) is a highly nonlinear equation. In order to solve the nonlinear equation, we introduce an iterative optimization algorithm to solve the cable tensions. It is well known that the initial iterative values have a significant impact on the iterative method. After several trails, we use the cable tensions and lengths obtained by massless straight line model as the initial ones. Thus, the iterative optimization algorithm of tension distribution can be summarized as follows.
Input the camera platform position
Calculate the initial length S0i = ∥
Calculate the initial value
Calculate
Calculate d i according to (3).
Update the new value of S
i
,
Judge whether the condition |d i j − d i j − 1| ≤ ε (ε is the iterative stop threshold) is satisfied or not. If it is, stop the iterative process. If it is not, go to (e), and repeat the process from (e)–(h), j = j + 1.
Calculate T i according to (17).
The flowchart of the cable tension iterative optimization algorithm is shown in Figure 6.
Flowchart of the cable tension iterative optimization algorithm.
6. Numerical Examples
6.1. Convergence and Effectiveness of the Algorithm
This example is used to verify the good convergence and effectiveness. The parameters of the camera platform model used in this example are listed in Table 1.
Parameters of the camera robot model.

Seeing Figures 7 and 8, suppose that the motion trajectory is a spatial spiral described as follows:

where R = 20 m; ω = 0.2π rad/s; v = 1.5 m/s. t = 0: Δt: tdur is a series of discrete time points; the duration time of the entire trajectory tdur = 10 s; the discrete time step Δt = 0.1 s. The starting position of the trajectory is (70, 50, 10)T m; the ending position of the trajectory is (70, 50, 25)T m.
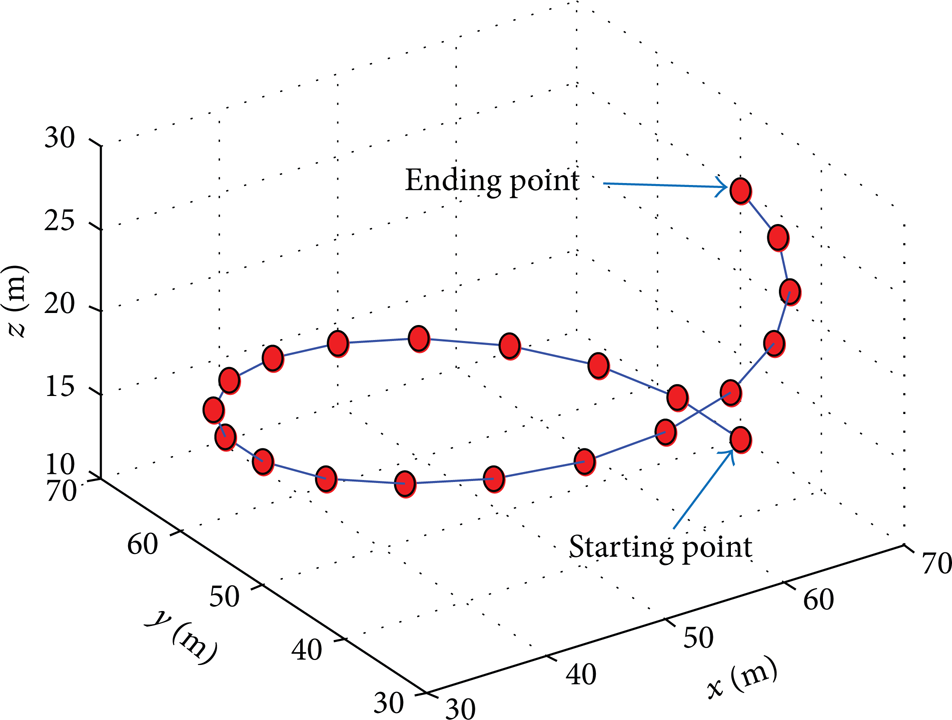
Spiral trajectory of the camera platform.
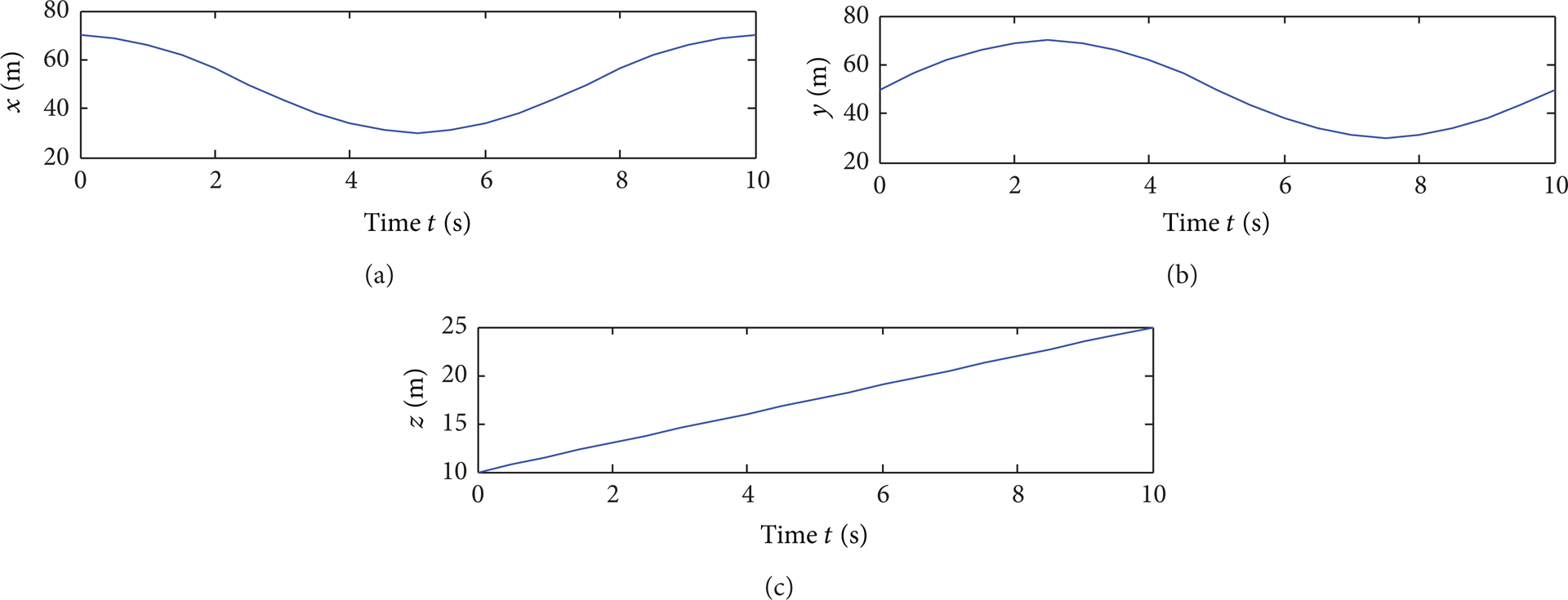
Spiral trajectory description in x-, y-, and z-component.
Figure 9(a) depicts the iterative number in every point of the trajectory. The maximum iterative number is 5, which confirms the good convergence of the algorithm presented in this paper. It also verifies the rationality selection of the initial iterative. Figure 9(b) shows the continuous variation of λ*, which is the optimal value of λ in every point. The trajectory is continuous, so λ* varies continuously.

Iterative number and λ* in every point along the trajectory using the iterative optimization algorithm.
In order to verify the validity of the iterative optimization algorithm, we compute the variances under two conditions: one is the variance of the special solutions to the tensions (excluding the optimization algorithm); the other is the variance of the tensions (including the optimization algorithm). As shown in Figure 10, variances of the tensions including optimization algorithm are obviously smaller than those excluding the optimization algorithm.

Variances excluding and including the optimization algorithm along the trajectory.
As Figures 11(a) and 11(b) illustrate, the cable lengths and tensions vary continuously. Due to (28), the height of the camera platform at the ending point rises by 15 m from the starting point. Thus, the lengths of the four cables at the ending point are all shorter than those at the starting point. Nevertheless, the angles between the tensions T i and their vertical components V i increase with the height rising of the camera platform, so the tensions must increase to withstand the weights and inertias of the cables and camera platform. Consequently, the tensions of the four cables at the ending point are larger than those at the starting point. The results verify the reasonability of the algorithm.

Cable lengths and tensions of four cables along the trajectory with the iterative optimization algorithm.
6.2. Necessity of Considering the Cable Sags and Inertias
In order to show the necessity of taking the cable sags and inertias into account, we compute the tensions using the catenary and massless straight line model, respectively. The maximal relative difference of tensions can be used for assessing the divergences between the two models [15], which can be expressed as follows:

where T
i
is the tension in the cable i at cable end
Positions of the fixed pulleys for the three cases.

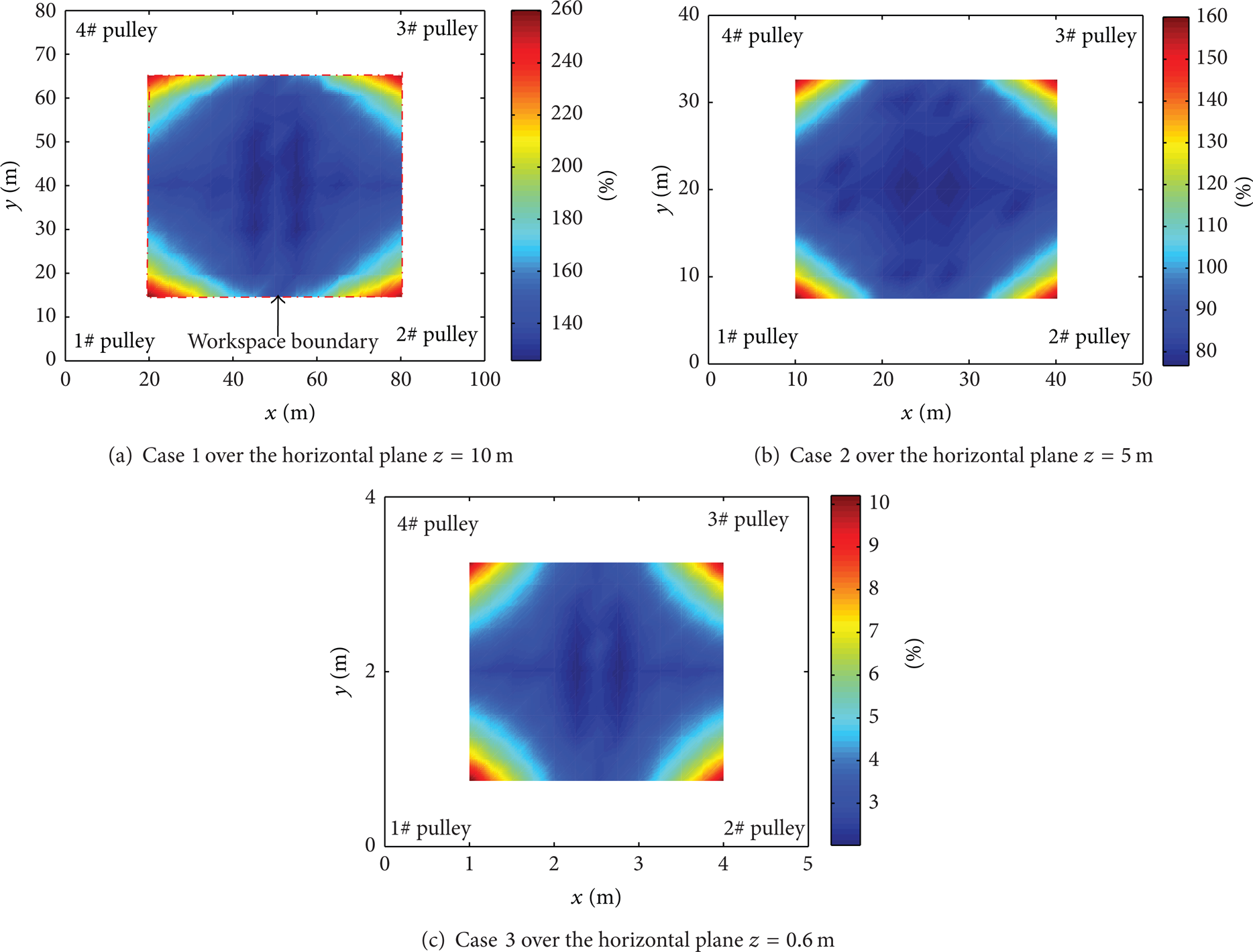
Maximal relative differences (%) on the cable tensions over the z-direction horizontal workspace sections (catenary model versus massless straight line model).
Figure 12(a) shows the obvious relative differences on all cables across the plane z = 10 m, and the maximal relative differences of four cables are about 260%. This demonstrates that taking the cable sags and inertias into account for the large-dimensional case is very necessary.
Figure 12(b) illustrates the big relative differences on all cables across the plane z = 5 m, and the maximal relative differences of four cables are about 160%. It is necessary to take the cable sags and inertias into consideration in the medium-dimensional case.
Figure 12(c) depicts the slight relative differences on all cables across the plane z = 0.6 m, and the maximal relative differences of four cables are 10%. Thus, the cable sags and inertias can be ignored in small-dimensional case. Straight line model can be employed for determining OCTD instead of the catenary model.
Note that all the three figures demonstrate a same phenomenal; namely, the values of χ i are relatively large in the four corners but small in the central areas of the planes. The farther the areas away from the center of the workspace planes, the bigger the values of χ i . It means that the cable is prone to slack in these areas; it also indicates that the divergences between the two models are relatively small in the central areas. At corner areas, the lengths of the cables are longer than those at other areas, so the weighs of the cables are greater than those at other areas. As a result, the tensions at the corner areas get larger than those at the central areas.
As for the small-dimensional case, the maximal relative differences are slight. Consequently, we can use the straight line model instead of the catenary model. But for the medium- and large-dimensional cases, the relative differences are rather great. Thus, ignoring the influence of the cable sags and inertias will yield relatively serious errors. For the force or force/position control, it is very possible to deviate from the desired forces or positions. Consequently, it is very necessary to take the cable sags and inertias into consideration when the sizes of the manipulators are large.
6.3. Sag-to-Span Ratio Characteristics
We also analyze the characteristics of sag-to-span ratio in the workspace. The parameters are the same as the ones of Case 1 in Section 6.2. Figure 13 draws the sag-to-span ratio of cable 2 across the horizontal plane z = 10 m; yet, due to the symmetry, it is easy to obtain the similar sag-to-span ratios across the plane z = 10 m of cables 1, 3, and 4. The maximum value of sag-to-span ratio is about 7%, which is less than 10%. The result verifies the ability of limiting the sag-to-span ratio of the algorithm.
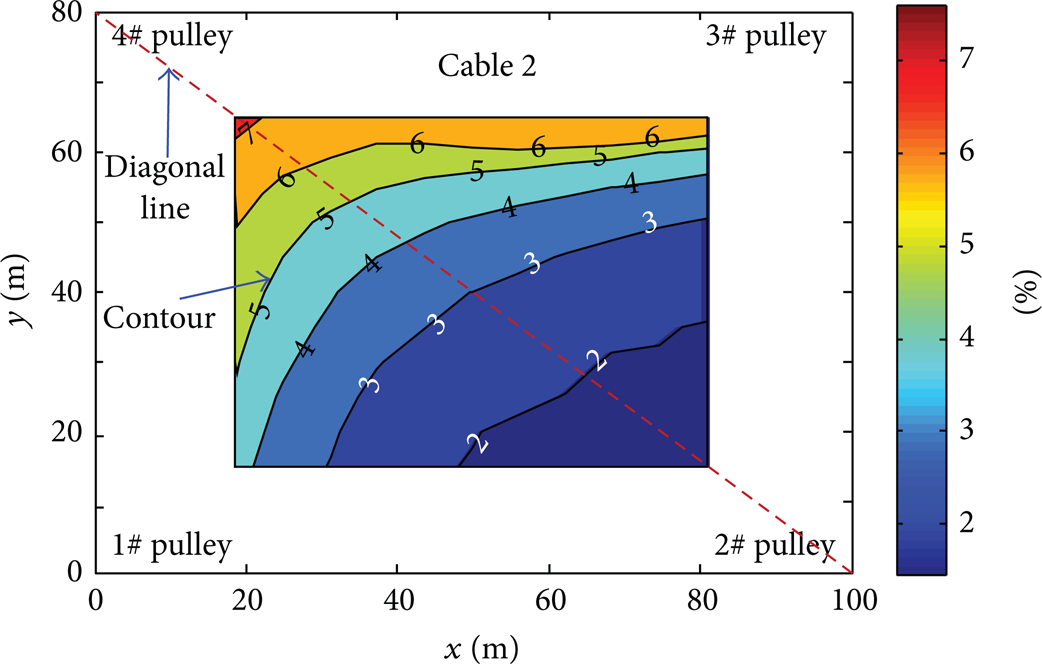
Sag-to-span ratio of cable 2 over the plane z = 10 m for a 50 kg camera platform (Case 1, the large-dimensional case).
We can see an obvious tendency; that is, the farther the distance from the 2# pulley, the larger the sag-to-span ratio. This finding agrees well with the common practice. The reason of this phenomenal is that the self-weight of the cable increases with the elongation of the cable length, leading to the radial increase of the sags. The contours in this figure denote the identical sag-to-span ratios in the workspace plane. The contours seem to be the curves, whose centers of the curves are at 2# pulley. The cable 2 is the longest along the diagonal line from 2# pulley to 4# pulley, so the contours protrude to 4# pulley. It is obvious that the sag-to-span ratio is the largest at the upper left corner of the workspace; it also means that the divergence between the catenary and straight line is the largest at this point, which fits well with Figure 12.
7. Conclusions
The camera robot is a large-span redundantly parallel cable-driven manipulator with high maneuverability. As a consequence, the dynamic model of the camera robot must include both cable sags and inertias. In order to compute the inertias of the cables, the fast length-varying catenary cables are discretized. Then, the dynamic model of the camera robot combined with the cable sags and inertias can be established which, to the best of our knowledge, has never been applied to high-speed redundantly parallel cable-driven camera robots. Furthermore, this kind of dynamic modeling can be applicable to other large-span parallel cable-driven manipulators with high-speed motions.
By using the proposed dynamic equation and sag-to-span ratio as the constraint conditions, we establish the optimal model for the cable tension distribution among the four cables. Based on the optimal model, an iterative optimization algorithm is introduced to determine the unique solution to cable tension distribution among the infinite solutions.
The simulation results show that the algorithm offers the validity, reasonability, and good convergence. The three nephograms (Figures 12(a)–12(c)) depict the three different tension maximal relative differences in the three cases. It can be concluded by analysis that the cable sags and inertias can be neglected for the small-dimensional cable-driven manipulators, but the cable sags and inertias must be taken into consideration for the medium- and large-dimensional ones. The contour map (Figure 13) illustrates the ability to limit sag-to-span ratio of the algorithm and distribution regularity of the sag-to-span ratio.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
The authors gratefully acknowledge the financial support of National Natural Science Foundation of China under Grants nos. 51175397 and 51105290.