
Abstract
The passive object localization (POL) problem in wireless sensor networks aims to determine the location of a target without any device attached for receiving or transmitting signal. This problem is challenging as there is very limited information available for deriving the target location. By combining the diffraction and scattering models, we propose a link sensing adaptive approach to POL, which first decides the target position attribute based on the signal strength and then localizes the target in different modes. We conduct rigorous localizability analyses and design a unit localization area scheme to achieve a higher level of localization accuracy. The efficacy of the proposed method is evaluated through comprehensive experiments in real life network environments.
1. Introduction
Localization has been a traditional research topic in wireless sensor networks (WSN), aiming to determine the location of a target for various purposes such as battlefield surveillance, environment monitoring, and target tracking [1]. In general, the techniques for localization are divided into two broad categories, namely, active object localization (AOL) and passive object localization (POL). The essential difference between them is whether the target of interest is required to carry some device to receive or transmit signal. AOL imposes this requirement such that the target location can be relatively easily determined by other anchor sensor nodes [2, 3], while POL [4–7] assumes that the target does not carry any assisting device, as constrained by either the target itself or the deployment environment. Due to the limited target information available, POL brings forth a greater challenge than AOL.
POL is important in certain applications spanning from acquiring the trajectory of enemy vehicles in the battlefield to learning about the habitat of wild animals in the forest. Typical examples include the animal monitoring project in [8], where the location information of animals needs to be provided for biological experts for the study of animals' habitat, as shown in Figure 1. In such application scenarios, it is infeasible or sometimes impossible to attach any device to the target and hence the best one could do is to leverage predeployed sensor nodes for target localization. As the applications of wireless sensor networks (WSN) proliferate into various new domains, POL has attracted a great deal of attention from many researchers in recent years. However, it still remains a challenge especially in outdoor and wide-area deployments. Many existing efforts employ artificial intelligence techniques such as machine learning to tackle the problem of POL and have been successful in certain contexts [9]. However, these approaches typically require a prior knowledge of the signal level in the environment, which increases the complexity of and limits the scope of their applications.

Wild animal monitoring scenes in the Qinling Mountains [8].
In this paper, we investigate the passive localization problem based on the received signal strength indicator (RSSI) in WSN. We propose a link sensing-adaptive approach to passive object localization, referred to as LSA-POL. Based on the signal propagation model, we first decide the target position attribute and then locate the target using different approaches. The contributions of our work are threefold. (i) We study and define the location attributes of a target, which are used for deriving the LSA approach. (ii) We propose LSA-POL with different location attributes to improve localization accuracy. (iii) We analyze target localizability and design a localization area unit (LAU) scheme to reduce the localization complexity and save the overall network energy cost for a prolonged network lifetime.
The rest of the paper is organized as follows. Section 2 describes the related work. Section 3 defines the problem of POL. Section 4 designs LSA-POL. Section 5 presents the simulation and experimental results. Section 6 concludes our work and sketches a plan on future work.
2. Related Work
We conduct a survey of the most relevant research efforts on localization techniques in WSN.
A number of radio frequency- (RF-) based localization systems have been proposed in the literature [10–12]. LANDMARC, proposed by Green Orbs in 2004, is a location sensing prototype that uses the radio frequency identification (RFID) technology for indoor localization. The location of a tracked object is estimated based on the k nearest reference tags [10]. In MoteTrack developed by Harvard researchers in 2005, the location of each mobile node is obtained by the received radio signal strength signatures from several beacon nodes, and the signature database is stored in every beacon node [11]. RADRA, designed by Microsoft Research Institute in 2000 and updated in 2009, is another important system that operates by combining the signal strength information at multiple base stations based on empirical measurements [12]. These localization systems are able to obtain a high localization accuracy in many application scenarios. However, they belong to the category of active localization that requires the target to carry a wireless device, hence limiting their applications.
In contrast to the aforementioned approaches, Kaltiokallio et al. proposed an intrusion detection system (IDS) that does not require the target to carry such wireless devices. Instead, they use the RSSI signal for intrusion detection, but not for object localization [13]. In the signal dynamics model proposed by Zhang et al. [14–16], the reference nodes are deployed as a grid array with an interval of 1 or 2 meters. When the target is present in one grid, it would affect several links between the reference nodes near the grid, and the degree of signal variations on different links is used to estimate the position of the object. In Liu's work [17–19], the authors proposed an approach that does not require the tracked objects to carry any devices as well, and the distance between two tags is set to be 1 meter. Hence, when the monitoring region is large, the cost and communication overhead would be high. These methods belong to the category of passive localization, featuring a short link distance and an ideal and dense deployment of nodes in the monitoring region. In recent years, most of the device-free radio-based localization (DFL) schemes are based on machine learning and grid matching. The support vector regression (SVR) system has been proposed to locate targets with a triangular deployment [14], but the system requires a training process before the localization phase. In [5], Wilson and Patwari proposed the radio tomographic imaging (RTI) system that requires an inerratic deployment (the localization area is divided into grids with a set of transceivers along each boundary) and the weight matrix records the distance of communication.
In this paper, we propose the LSA-POL scheme that locates a target in an LAU that does not require any training process as opposed to [17, 18]. Compared with the work in [15, 16], the proposed LSA-POL method covers a larger monitoring area and is more suitable for practical applications. In the process of localization, LSA-POL requires a smaller amount of data and a lower demand of bandwidth for wireless transmission than the approach in [5] and achieves a higher level of localization accuracy than Zhang's work [14, 16] under the same simulation setup.
3. Passive Object Localization Problem
In POL, the target of interest does not carry any device to receive or transmit signal, hence presenting very limited data for localization except for some basic information about the predeployed nodes, such as their location and transmit/receive power, based on which more information could be derived. For example, we can calculate the distance of communication using the locations of the nodes and calculate the RSSI value using the distance of communication and transmit/receive power [20].
In general, the path loss

We conduct a simple experiment in an open outdoor area as shown in Figure 2 to investigate the variation of RSSI caused by a target. We observe that the RSSI remains relatively stable if no target is present in the monitoring area but experiences considerable bidirectional fluctuations, otherwise, as shown in Figure 3. We will conduct further analysis of the signal fluctuation and study the relationship between the target location and the RSSI of the influenced links in the next section.
Network topology.

RSSI fluctuation.
4. Link Sensing-Adaptive POL
We propose the LSA-POL method, whose overall structure is shown in Figure 4, including two main components: (i) define target location attributes and (ii) calculate the target-node distance based on different models according to different location attributes. We further discuss the localizability of a target and design the localization area unit scheme.

The overall structure of LSA-POL.
4.1. Target Location Attributes
According to the wireless communication theory, the position of a target would affect the level of fluctuation in the received signal. Depending on its position, the presence of a target may enhance or reduce the RSSI of the influenced link, which is a bidirectional effect on the fluctuation. Therefore, we classify the target location according to the fluctuation variable η, which is defined as


When the target is on the link, it blocks the signal transmission, thus resulting in a reduced RSSI of the link, as shown by the simulation results in Figure 5(a). When the target is off the link, the diffracted or scattered signal would increase the RSSI, as shown by the simulation results in Figure 5(b). The calculation of the target-node distance depends on different location attributes.

RSSI fluctuation.
4.2. Target-Node Distance Calculation
We calculate the target-node distance in two scenarios, where the target is on or off the link.
4.2.1. The Target is on the Link (
)
When the target is located on the link between two nodes t and r, the RSSI value is lower than that in the free space propagation as the target blocks the shortest-path communication.
As Figure 6 shows, the area of the Fresnel zone determines the amount of the RSSI attenuation. Therefore, the receiver observes different RSSI values when the object is at different locations along the link. The signal strength



The deployment scene when the target is on the link.
In practice, the object such as a human being or an animal is not of an ideal shape with an infinite width and a fixed height, so the signal may pass by the object through different paths. We assume that there are N signal diffraction paths, based on (5); the aggregated signal strength at the receiver can be calculated as


4.2.2. Target is off the Link (
)
When the target is located off the link, the RSSI node r receives not only from node t, but also from the target (the second transmitter), as shown in Figure 7. In this case, the RSSI measurement



The deployment scene when the target is off the link.
4.3. Symmetric Properties of Signal Strength
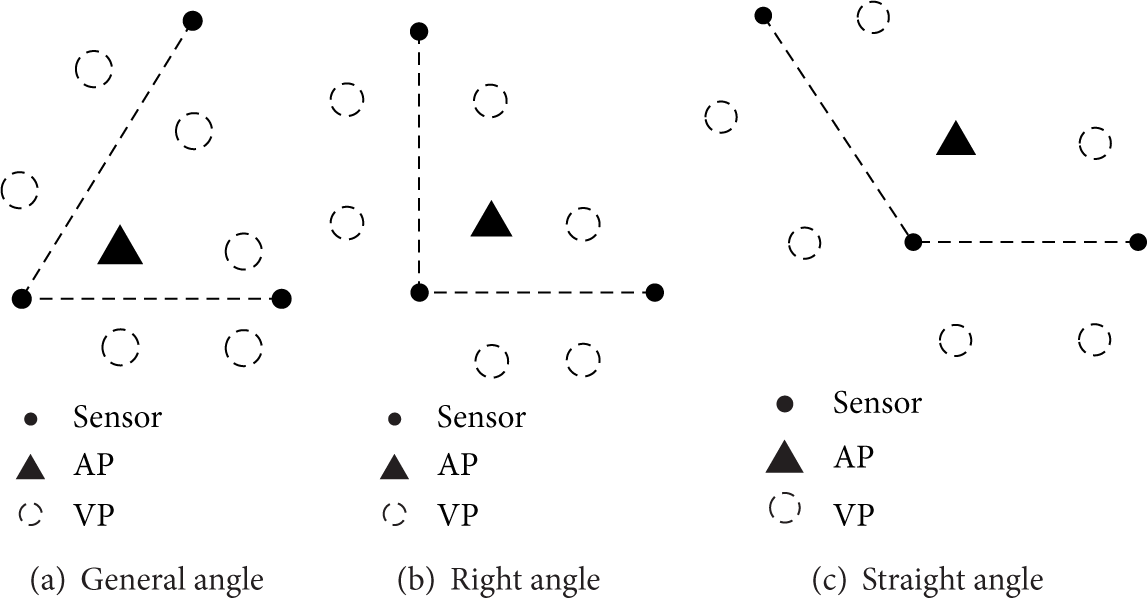
From the RSSI distribution shown in Figure 8, we observe that (i) when the target is on the link (i.e., the diffraction model) a certain RSSI value might be mapped to two positions, that is, actual position (AP) and virtual position (VP), and (ii) when the target is located off the link (i.e., the scattering model) there are even a larger number of VPs. The communication theory provides an explanation on the existence of VP [23]. We describe below the symmetric properties of signal strength in the diffraction and scattering models.

The link RSSI fluctuation degree with different communication distances.
4.3.1. Diffraction Model
In this model, the diffraction coefficient is given by


Actual position and virtual position.
4.3.2. Scattering Model
In this model, the scattering gain is given by

4.4. Target Localizability
According to the symmetric properties analyzed above, a single link is not sufficient to locate the target because of the existence of VPs. Therefore, we need two or more links for target localization. When there are two links available, we consider the following two cases.
4.4.1. Case I
The two links consist of three nodes including one common node shared by them, as shown in Figures 11 and 12.
In Figure 11, the target is on one link
In Figure 12, although the target is off the link
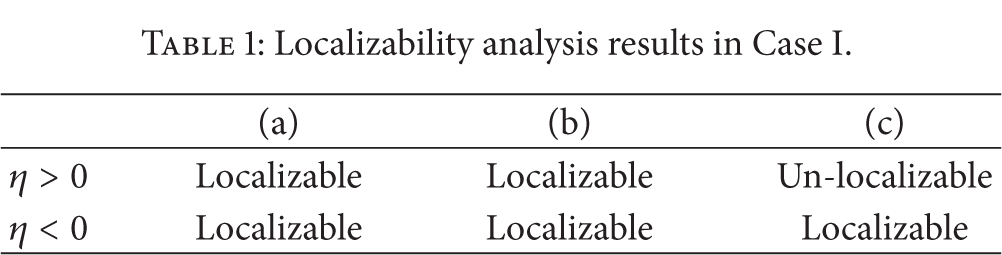
We summarize the localizability analysis results in Case I in Table 1.
Localizability analysis results in Case I.
4.4.2. Case II
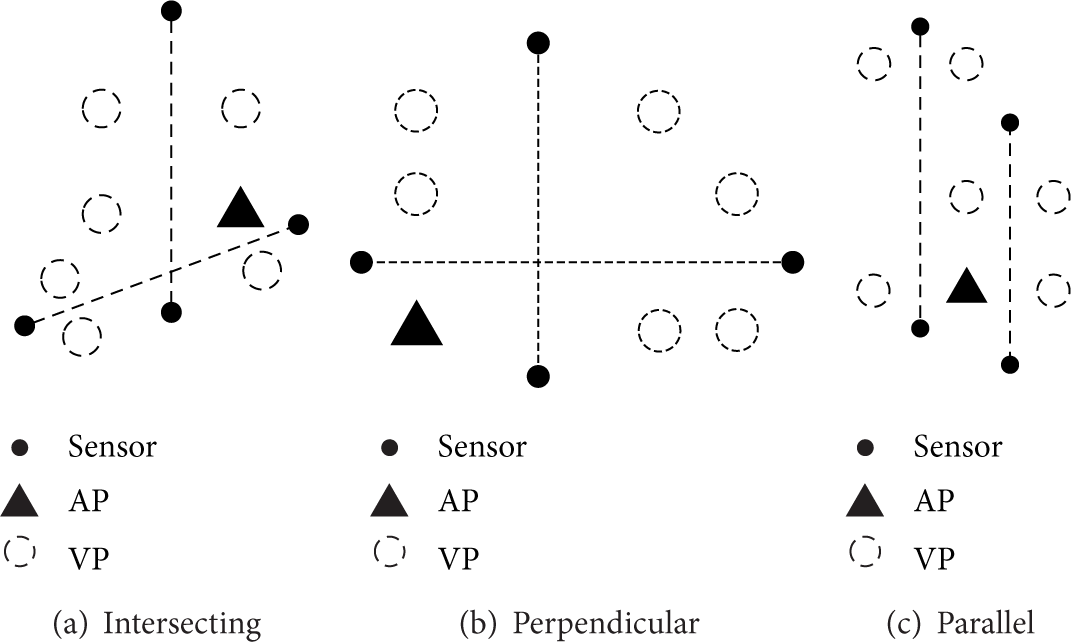
The two links consist of four nodes, and there are three relationships between the two links, that is, intersecting, perpendicular, and parallel, as shown in Figures 13 and 14.
When the target is located on one link

The VP of the two links overlap.

Two links consist of three nodes, and
Two links consist of three nodes, and

Two links consist of four nodes, and
Two links consist of four nodes, and
When the target is located off the links
We summarize the localizability analysis results in Case II in Table 2.
Localizability analysis results in Case II.

4.5. Design of Localization Area Unit (LAU)
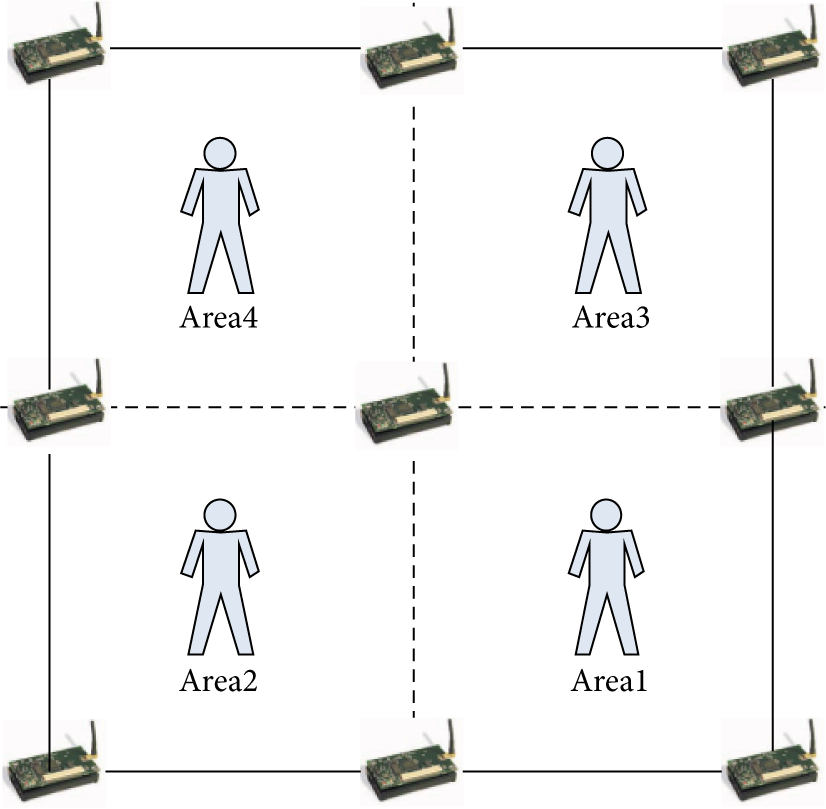
According to Section 4.4, we shall design a localization area unit to ensure that the localization result is unique. The hexagon deployment strategy can achieve a seamless coverage of the entire monitoring region according to the cellular coverage theory, as shown in Figure 15. Based on the localizability analysis results in Section 4.5, we need to deploy another node in the midpoint of each regular hexagon, which divides the regular hexagon into six separate equilateral triangles. We refer to each equilateral triangle as a localization area unit (LAU), as shown in Figure 16. Within an LAU, the distance from an unknown target to the sensor node with an interfered link determines the location of the target. Since each LAU has three nodes and three communication links, we first calculate the value of η separately and then select the two most affected links to localize the target.

Cellular coverage.

Localization area unit.
4.6. Target Position Estimation
Suppose that the location of an unknown target is 
The difference between the measured and the actual distances can be represented by
For distance-based localization, we also need to consider how to measure the distance in the physical world. From the above analysis, we know that the interfered RSSI is a function of the distance from the target to two communication nodes. The distances from an unknown target to several reference nodes can be obtained by (10) and (11) within an LAU, and the target location can then be uniquely determined through trilateration.
4.7. LSA-POL Discussion
We summarize the advantages of LSA-POL in the following three aspects.
Data Type. LSA-POL does not require the target to carry any devices and only uses the location information of the nodes and the RSS values of the influenced link. These simple data types satisfy the requirements for POL.
Complexity. LSA-POL dose not require a learning phase and any priori knowledge before localization, so that the localization complexity is moderate. Furthermore, the LAU scheme together with an appropriate selection of links can further reduce the localization complexity.
Accuracy. LSA-POL determines the target location attributes, which confine the localization in a small area and therefore improve the localization accuracy to a certain degree.
The LSA-POL method does not require any training process; the demanding of bandwidth is lower and the monitoring area is larger. Combining the analysis on the data type, the complexity, and the accuracy, the proposed LSA-POL method is suitable for practical applications.
5. Performance Evaluation through Simulations and Experiments
5.1. Simulation-Based Performance Evaluation
We conduct simulations in an equilateral triangular area with three different edge lengths (i.e., communication distance), namely, 3 m, 6 m, and 9 m. In each case, there are three anchor nodes located on the three vertices of the triangle and one target sensor node. We randomly choose three locations for the target sensor node and estimate the location using a genetic algorithm. The pseudocode of the simulation procedure is provided in Algorithm 1.
The locations of three anchor sensor nodes, a fixed triangle edge length. A random location The estimated location
(1) Compute the true RSSI values (2) Compute the estimated RSSI values the estimated target locations (3) Construct the optimization function of differences between the true RSSI values (4) Solve the optimization function (5) Obtain the target location the true RSSI values
In Case I with the edge length of 3 m, the locations of the three anchor sensor nodes are

The LSA-POL localization results when the triangle edge length is 3 m.
In Case II with the edge length of 6 m, the locations of the three anchor sensor nodes are

The LSA-POL localization results when the triangle edge length is 6 m.
In Case III with the edge length of 9 m, the locations of the three anchor sensor nodes are

The LSA-POL localization results when the triangle edge length is 9 m.
In these simulations, we are able to estimate the target location very close to its true location. The detailed localization results and the average errors are tabulated in Table 3, which shows that the localization error is within an acceptable range and the proposed LSA-POL method is effective in solving the POL problem.
The target locations and localization results with average errors in the simulations.

5.2. Experiment-Based Performance Evaluation
5.2.1. Experiment Setup
We conduct two experiments to illustrate the effectiveness of the proposed LSA-POL method in an open space. In the experiments, we use MICAZ sensor nodes [24] with CC2420 processing chip and 2.4 GHz wireless signal frequency at the data rate of 2 times/sec. The height of the obstacle (target) is 1.6 m, and the height of the transceiver node is 0.95 m. In order to reduce the interferences of external factors with the links, we run the experiments in the North Square on Chang'an Campus of Northwest University, China, as shown in Figure 20.

LSA-POL localization experiment in an open space.
5.2.2. Experimental Results
(a) Experiment A. The target is located on the communication link. In this experiment, the distance of communication is set to be 4 m, 5 m, 6 m, 8 m, and 10 m, respectively. An obstacle (i.e., target) with the height of 1.6 m is placed at five different positions of each link (the relative position
The target locations and diffraction gains in Experiment A.

Note: two or three digits after the decimal point are retained.
The target locations and localization results in Experiment A.

Note: two digits after the decimal point are retained.
(b) Experiment B. The target is located off the communication link. In this experiment, the distance of communication is set to be 3 m, 4 m, 6 m, and 8 m, respectively. An obstacle with the height of 1.6 m is placed at four random positions
The target locations and the localization results in Experiment B.

In these experiments, we are able to localize the target. The results of the localization are close to its actual location. The detailed localization results are tabulated in Tables 5 and 6. The LSA-POL method proposed in this paper is effective in solving the POL problem in real world.
5.3. Discussion of Performance Evaluation
The location attributes help reduce the localization area and therefore improve the localization accuracy. We run LSA-POL simulations using the parameters in Table 7 and compare with Zhang's work [14]. The accuracy measurements of three localization methods (i.e., LSA-POL, Midpoint, and Intersection) in the same simulation environment are plotted in Figure 21, which shows that LSA-POL performs significantly better than the other two methods in comparison. The location estimation error of LSA-POL is about 2 m, and that of Midpoint and Intersection is about 9 m and 5 m, respectively. The performance superiority of LSA-POL is mainly brought by the determined location attributes, which improve the localization accuracy.
Parameter setting.


The cumulative density function (CDF) of the target localization errors in LSA, midpoint, and intersection.
6. Conclusion and Future Work
In this paper, we proposed LSA for passive object localization. LSA-POL determines the location attributes according to the fluctuation η and then uses different models to calculate the target-node distance. We analyzed the localizability of a target and designed a localization area unit scheme. The simulation and experimental results showed that our approach has a superior performance in terms of target localization accuracy over existing methods.
We are interested in the localization problem in the presence of multiple targets which would result in more complex RSSI values of the influenced links and hence pose a greater challenge.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This research was supported in part by China NSFC Grants (61170218 and 61272461), the National Key Technology R&D Program (2013BAK01B02), Department of Education research project of Shaanxi Province, China (2013JK1126, 2013JK1127), and the Natural Science Foundation of Northwest University (12NW05).