
Abstract
Cooperative diversity has been shown to provide significant performance gains in wireless networks where communication is impeded by channel fading. In resource constraint networks, the advantages of cooperation can be further exploited by optimally allocating the energy and bandwidth resources among users in a cross-layer way. In this paper, we investigate the problem of transmission power minimization and network lifetime maximization using cooperative diversity for wireless sensor networks, under the constraint of a target end-to-end transmission reliability and a given transmission rate. By utilizing a cross-layer optimization scheme, distributive algorithms which jointly consider routing, relay selection, and power allocation strategies are proposed for the reliability constraint wireless sensor networks. We demonstrate through simulations that the proposed cross-layer cooperative strategies achieve significant energy savings and prolong the network lifetime considerably.
1. Introduction
Wireless sensor networks are composed of nodes typically powered by batteries, for which replacement or recharging is very difficult, if not impossible [1]. Therefore, minimizing the energy consumption for reliable data transmission becomes one of the most important design considerations for such networks. As an emerging and powerful solution that can overcome the limitation of resource constraint wireless networks [2], cooperative communication has received significant attention recently as one of the main candidates for meeting the stringent requirement of the resource limited networks [3].
Cooperative communication is developed from the traditional MIMO (multiple-input and multiple-output) techniques [4] and the model of relay channels [5]. Though MIMO has been shown to be able to significantly increase the system throughput and reliability [4], it is not easy to be directly implemented in the wireless sensor networks due to the limitation on the size and hardware complexity of sensor nodes. Cooperative communication, however, is able to achieve the same space diversity by forming a virtual distributed antenna array where each antenna belongs to a different node. We refer to this form of space diversity as cooperative diversity because the terminals share their antennas and other resources to create a virtual array through distributed transmission and signal processing. With cooperation, users that experience a deep fade in their link towards the destination can utilize quality of service (QoS) [3].
Various cooperative schemes have been developed so far. Cooperative beamforming scheme was proposed in [6] for CDMA cellular networks. Coded cooperation was proposed in [2], along with analog-and-forward (AF) and decode-and-forward (DF) schemes. Diversity-multiplexing tradeoff tools were utilized [4] to analyze the performance of different cooperative schemes such as fixed relaying, selection relaying, and incremental relaying [7]. Multirelay cooperative protocol using space-time coding was proposed in [8]. Opportunistic relaying (or selective cooperation) was proposed with different relay selection policies in [9]. Power allocation problem and SER performance analysis in resource constraint networks were studied in [3]. These works are mainly focused on improving the link performance in the physical layer.
Cooperative communication inherited a cross-layer problem, since communication resources (e.g., energy, bandwidth) have to be carefully allocated among different nodes in the network. Therefore, the integration and interaction with higher layers has become an active research area in recent years. There have been a lot of efforts towards this consideration such as combining node cooperation with ARQ in the link layer [10], or resource allocation in the MAC layer [11], and routing algorithm in the network layer [12, 13]. For example, in [14], the relay selection in MAC layer and power allocation strategies in the physical layer are combined into a RTS-CTS signaling scheme, not only providing full diversity gains on the order of the number of relays, but also prolonging network lifetime. By taking into account the higher layer issues, the performance of the whole network can be further improved.
However, a comprehensive cross-layer optimization incorporating three layers (routing, relay selection in MAC, and power allocation in PHY) for cooperative networks is still an open issue. Although there are some efforts concerned in optimizing some metrics such as throughput [15], delay [16], or power consumption [17] under certain QoS constraints, these efforts focus on either one-hop scenario or fading-free channels. In [18], the author studied the problem of constructing cooperative route along with power allocation algorithm to minimize end-to-end transmission power under the constraint of throughput. By pointing out that the throughput of each link should be the same as the target throughput of the route, two heuristic routing algorithms are proposed. Different from [18], our work focuses on different optimization goal and constraints. We target on energy minimization as well as network lifetime maximization. The QoS constraints in our work are end-to-end transfer reliability while the work in [18] is under the constraint of end-to-end transmission capacity. We believe in wireless sensor network and the network lifetime maximization, and the guarantee for end-to-end reliability is more important than other considerations. Moreover, we extend our analysis into multirelay scenario and develop a corresponding algorithm. Another work of cross-layer optimization for cooperative network is [19]. The author decomposes the problem of minimizing network power consumption into a routing subproblem in the network layer and a joint relay selection and power allocation subproblem in the physical layer. However, the decomposition method to solve this cross-layer problem is defective for its complexity. Since the algorithm proposed in [19] is nonheuristic, it needs exhaustive iterations, with long converge time and large overhead for message exanging, thus unsuited for sensor network application. On the other hand, in our work, we try to derive a closed-form solution (though may not be optimal) and design our algorithm in a heuristic way; thus, it can be distributively implemented in wireless sensor networks. In [20], the cooperative communication and data-aggregation techniques are jointly adopted to reduce the energy consumption in wireless sensor networks by reducing the amount of data for transmission and better using network resources through cooperative communication. In [21], the problem of how to strike a balance between the QoS provisioning and the energy efficiency when a cooperative communication scheme is applied to a clustered wireless sensor network is studied, by adopting a coalition formation game model with the goal of balancing the outage performance and the network lifetime. In [22], by presenting a cross-layer optimization framework for a wireless sensor network, the proposed strategy provides the best set of relays, the optimal broadcasting power, and the optimal power values for the cooperative transmission phase.
There are also other works in prolonging network lifetime using cooperative communication methods. In [23], collaborative beam forming (CB) and cooperative transmission (CT) are both studied as for the lifetime extension, based on the assumption that the relay nodes are densely and uniformly distributed over a disc, and the distance between the sender and relays is too small to be neglected compared to the distance between the sender and the receiver. In our work, we remove these assumptions and try to obtain a more generalized algorithm. In [24], a cooperative scheme is proposed combining the maximum lifetime power allocation and the energy aware routing to maximize the network lifetime. This technique is not a cross-layer method since the energy conserving routing is formed first, and cooperative transmission is applied based on the constructed routes. Therefore, the merits of cooperative transmission are not fully explored since the optimal cooperative route might be completely different from the noncooperative route. In [25], a suboptimal algorithm for lifetime maximization is developed based on the performance analysis for MPSK modulation in the condition of adding some special cooperative relays at the best places to prolong the network lifetime, while, in our work, the nodes are randomly distributed and no additional relay nodes deployed. In a word, we propose a novel scheme to increase the network lifetime by exploiting the cooperative diversity and jointly considering routing, relay selection, and power allocation in arbitrarily distributed wireless sensor networks.
The main contribution of our work is as follows: in the context of wireless sensor networks using cooperative communication, we propose a cross-layer optimization scheme considering three layers for power minimization under the end-to-end reliability constraint for the first time as far as we know; we propose a cross-layer optimization scheme for opportunistic relaying multirelay scenario for the first time as far as we know; we propose a cross-layer optimization scheme for lifetime maximization for arbitrarily distributed networks without node placement assumption (such as uniform node distribution or additional well-placed relays). Although our work may be applied in general wireless networks, it is actually designed for wireless sensor networks, for the optimization objective, constraints, and system model are all based on wireless sensor networks.
The rest of the paper is organized as follows. In the next section, we describe our system model. In Section 3, we formulate and analyze the min-power and max-lifetime problem in the reliability-constrained cooperative networks. Then, we derive closed-form expressions, which lead to our cross-layer optimization algorithms proposed in Section 4. In Section 5, we show the simulation results for the energy savings and lifetime comparison of the proposed algorithms and other cross-layer algorithms. Finally, Section 6 concludes the paper.
2. System Model
Several cooperative communication schemes have been proposed in recent years, such as AF (amplify forward), DF (decode forward), and CF (coded forward). Since a generalized optimization is much harder and may be our future work, we only focus on one particular cooperative scheme which is more likely to be adopted in the resource constraint sensor networks. In the following, we will set up our system model and explain why we choose this model.
First we consider the cooperative scheme. AF and fixed relaying DF [7] are not efficient since these schemes may waste energy and bandwidth in unnecessary transmission when the packet has already been correctly received or the relay cannot decode the packet. Selective relaying DF improves fixed relaying DF but is still not good enough. CF can achieve the best performance when the channel condition is bad but is too complex to be implemented in WSN and also introduces considerable overhead when the channel is good. Therefore, we adopt the incremental relaying DF scheme [7], which is proven to be very efficient and achieve the optimal diversity-multiplexing tradeoff by exploiting limited feedback from the destination terminal. Using a single bit to indicate the success or failure of the direct transmission, cooperation only occurs when the destination fails to receive the packet and the relay correctly decodes the packet. We believe this scheme is much easier to be applied in the WSN compared to CF and has better performance compared to AF and other DF scheme. So we use it for analysis. For multirelay scenario, consequent relaying [19] introduces considerable delay and poor bandwidth usage since several relays have to perform relaying one by one and is much harder for analysis. Space-time coding [4] scheme is very efficient in bandwidth utility but needs very strict synchronization and much more overheads to evaluate channels and exchange codes, making it difficult to be implemented in sensor networks. Thus, we adopt the opportunistic relaying scheme [8]. As [8] depicted, the opportunistic relaying can achieve the diversity order of the relay number by using only one relay in the expense of some control overhead in the MAC layer (e.g., RTS, CTS). The opportunistic relaying scheme is different from the single-relay scheme in that the relay is selected based on the time-to-time channel condition, while in the single-relay scheme the relay is selected based on the long-term average channel condition. Since only the best relay is needed to receive the whole packet, the energy and bandwidth are both saved compared to the consequent relaying and space-time coding scheme.
Then, we take a look at the signal processing strategy in the receiver, and we assume that the receiver decodes the signals received either from the sender or from the relay, instead of combining the received signals together. In general, maximum ratio combining (MRC) [21] at the receiver gives the optimum result. However, it requires a major modification for the existing RF (radio frequency) in sensor nodes such as CC2420. Since the RF for sensor nodes is half duplex, for MRC scheme, the receiver has to store an analog version of the received packet from the sender, before it combines it with the analog version from the relay. However, the analog signals practically cannot be stored in the existing RF of sensor nodes. Therefore, we adopt selective combination in our analysis.
The channel model we used is a very common assumption in many cooperative networks’ analysis, where the channels are quasistatic Rayleigh fading channels, and the noise is assumed to be additional white Gaussian noise (AWGN). This means that the channel coefficients are constant during a complete frame and may vary from a frame to another. All the channel coefficients are independent complex Gaussian random variables with zero mean and unit variance. And the noise terms are modeled as zero mean, complex Gaussian random variables with variance
Considering the MAC layer, since we are not focused on the bandwidth constraints, we do not take care of the bandwidth allocation problem. We assume the conflicts and contention are avoided by a good TDMA (there have been lots of works on the TDMA/FDMA scheduling for eliminating the collisions [19, 20]; we can use such algorithms, but the specific algorithm is out of scope of the paper) or FDMA/CDMA MAC. There is an available channel pool, which has been assigned for different links through TDMA or FDMA/CDMA, such that simultaneous transmissions are possible, where transmission on one link causes very weak interference to others.
As for the power allocation between sender and relay, we take the same assumption as in [18] that the sender and the relay use the same power. The power allocation between sender and relay has been investigated in [7]; it is shown that the same power allocation scheme achieves a similar performance as optimal allocation scheme, especially when the relay nodes are not far away from the source (considering WSN is always densely distributed, it is acceptable). Moreover, in incremental relaying, since the relay transmits message only occasionally, the power of relay contributes to a small part in the total transmission power of the whole route [18]. Therefore, for simplicity of analysis, we just allocate the same power for the relay as the sender, which makes our solution not optimal but more applicable.
Finally, for the performance evaluation tool, we analyzed outage performance instead of packet error rate (PER) or symbol error rate (SER) to compute the reliability function when considering reliability. Although PER or SER may be more widely used in practical systems, there is actually an intimate connection between outage and PER/SER [4]. Therefore, results derived by outage analysis can be extend to PER/SER, which may be done by other works.
Since we aim to develop an algorithm which can be implemented distributively, it is inevitable to convert a NP hard linear programming problem to a computable problem by introducing some approximations (such as
3. Cross-Layer Optimization Problem in Cooperative Sensor Networks
In this section, we formulate and analyze the min-power problem and the max-lifetime problem in the context of reliability constrained cooperative networks and derive applicable solutions, leading to our algorithms which will be described in detail in the next section.
3.1. Problem Formulation
Consider a multihop wireless sensor network consisting of multiple arbitrarily distributed sensor nodes and one sink. Each sensor node has a single omnidirectional antenna and can dynamically adjust its transmitted power. A graph
For
(1) Min-Power Problem. Consider

(2) Max-Lifetime Problem. Consider

3.2. Problem Analysis
From Figure 1, we can see that to forward data from node i to node j on link

Cooperative transmission (CT) and direct transmission (DT) modes as building blocks for any route.
(1) Direct Transmission. For the direct transmission between node i and node j, the received symbol can be modeled as





The end-to-end transmission success probability of the route ω is the product of the transmission success probability of each link. For direct transmission, using (7) there is the following:


(2) Single-Relay Cooperation. For the cooperative transmission mode, the sender i sends its symbol in its time slot. Due to the broadcast nature of the wireless medium, both the receiver j and the relay r receive noisy versions of the transmitted symbol. The received symbols at the receiver and the relay can be modeled as





When the SNR is high enough,

From (16), we can see that to maximize reliability, the best relay for a given link is the node which contributes to the least
For the cooperative mode, the end-to-end transmission success probability can also be attained using (16):

(3) Multirelay Cooperation. For the multirelay cooperation mode, we use the opportunistic relaying scheme proposed in [5]. According to the opportunistic relaying scheme, for each frame, a node with the best instantaneous relaying channel condition among several potential relays is selected to forward the packet in each frame. Specifically, the K potential relays (named




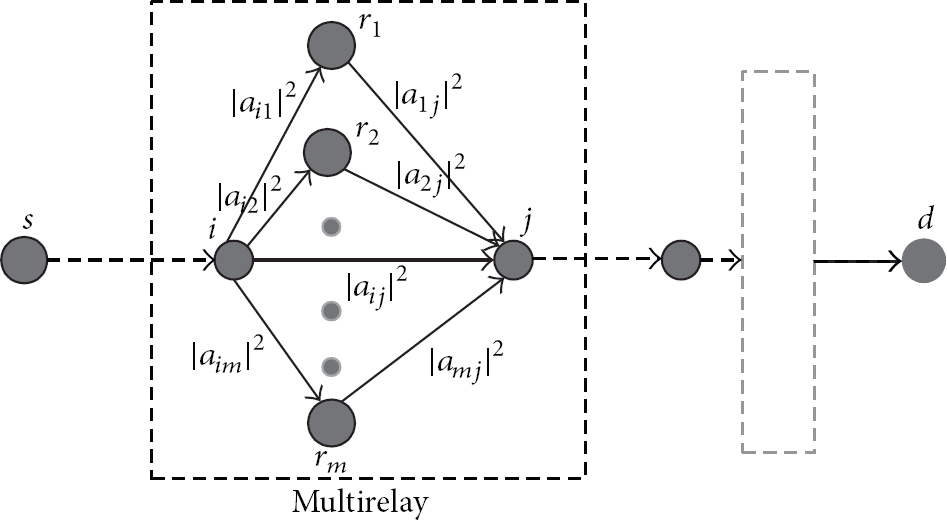
Multirelay cooperation modes as building blocks for any route.
For the multirelay cooperative mode, the end-to-end transmission reliability can also be attained using (21):

3.3. Min-Power Solution
Now consider the min-power problem depicted in (1). This is a convex problem and we can solve it using Lagrangian multiplier techniques [22].
Set





For cooperative transmission, using (16), there is


The upper bound of the total transmission power for cooperative mode is (discussed in Appendix C)

For the multirelay cooperation mode, using (21) and implementing the same mathematical manipulation as above, there is


3.4. Max-Lifetime Solution
Now we consider the max-lifetime problem formulated in (2). We assume some data flows (denoted as




Let


To maximize the lifetime of the entire network, the best solution is that the lifetime of each node in the route of flow is equal to a target lifetime. That is,
Using (16), the optimization problem for direct transmission mode is




4. Cooperation-Based Cross-Layer Schemes
In this section, we propose detailed minimum-power and maximize-lifetime cross-layer algorithms, under the constraint of end-to-end success probability and data rate, both in direct mode and cooperative mode. We assume that each node broadcasts periodically HELLO packet to its neighbors to update the local topology information. Our algorithms are composed of two parts: routing (and relay selection) algorithm and power allocation algorithm. Algorithms are based on the conventional Bellman-Ford shortest path algorithm which can be distributively implemented. In Bellman-Ford algorithm, each node
4.1. Min-Power Cross-Layer Scheme with Direct Transmission
From (29), we can see that to minimize
Algorithm 1 (Min-Power Cross-layer Scheme with Direct Transmission (MPCS-DT)).
Consider
Each node initiates its cost for routing as ∞ except Each node estimates the effective distance Each node calculates the costs of its outgoing links as Each node updates its cost toward the destination as If the required QoS parameter If not, the source will deliver a message though the constructed route, informing all nodes along the path about the Go to (2).
4.2. Min-Power Cross-Layer Scheme with Cooperative Transmission
The min-power scheme for cooperative communication is composed of two parts: single-relay scheme and multirelay scheme. For single-relay scheme, we can see from (32) that to minimize
Algorithm 2 (Min-Power Cross-layer Scheme Cooperative Transmission (MPCS-CT) (for single-relay scenario)).
Consider
& (2) The same as steps 1 & 2 in Algorithm 1. Each node calculates the costs of its outgoing links as Each node updates its cost toward the destination as & (6) The same as steps 5 & 6 in Algorithm 1 except each path node and relay node in the route adjust the transmit power according to (31). Go to (2).
For multirelay scheme (assume we need K relays for each link), the difference with single-relay scheme is that the K potential relays have to be selected and only the best relay is chosen from time-to-time in every transmission slot. According to (34) and the definition of
Algorithm 3 (Min-Power Cross-Layer Scheme Cooperative Transmission (MPCS-CT) (for opportunistic relaying multirelay scenario)).
Consider
& (2) The same as steps 1 & 2 in Algorithm 1. Each node sorts all its neighboring nodes ascending according to the value of Each node updates its cost toward the destination as & (6) The same as steps 5 & 6 in Algorithm 1 except each path node and relay node in the route adjust the transmit power according to (33). Go to (2).
4.3. Max-Lifetime Cross-Layer Scheme with Direct Transmission
From (43) we can see, to find a route which maximizes
Algorithm 4 (Max-Lifetime Cross-Layer Scheme with Direct Transmission (MLCS-DT)).
Consider
& (2) The same as steps 1 & 2 in Algorithm 1. Each node measures its residual energy Each node updates its cost toward the destination as & (6) The same as steps 5 & 6 in Algorithm 1 except each node in the route adjust the transmit power according to (44). Go to (2).
4.4. Max-Lifetime Cross-Layer Scheme with Cooperative Transmission
From (46) we can see, to find a route which can maximize
Algorithm 5 (Max-Lifetime Cross-Layer Scheme with Cooperative Transmission (MLCS-CT)).
Consider
& (2) The same as steps 1 & 2 in Algorithm 1. Each node calculates the effective distance of its outgoing links as Each node measures its residual energy Each node updates its cost toward the destination as & (7) The same as steps 5 & 6 in Algorithm 1 except each forward node and relay node in the route adjust the transmit power according to (47). Go to (2).
Figure 3 gives us an example and explains how our algorithm works when two flows with the same source are transferred. When node s first transfers flow1, it may choose PATH1. After that, when s is going to transfer another flow flow2, the nodes in the PATH1 have changed their link costs, since

An example of how two flows with the same source are transferred using our max-lifetime scheme.
5. Performance Evaluation
5.1. Simulation Setup
We use Matlab as our simulation tools. In the simulation, we have implemented three groups of tests. The first group of tests is used for the comparison between our min-power algorithms and other cross-layer min-power algorithms. The compared algorithms are MPCR [4] and CASNCP which will be described in the next subsection. The second group of tests is used for the comparison between our max-lifetime algorithms and another cross-layer max-lifetime algorithm, called GPA-CR [5]. The third group of tests investigates the impact of different parameters on the performance of our algorithms such as the number of relays and the required QoS. The setup of each test group will be described, respectively, in the following subsections.
5.2. Comparison for Min-Power Algorithms
To demonstrate the effect of cross-layer design for cooperative communication, we implement two min-power algorithms: MPCS-DT and MPCS-CT in random networks. For better comparison, we also implement two other cooperation-based algorithms, the minimum-power cooperative routing (MPCR) algorithm and cooperation along the shortest noncooperative path (CASNCP) algorithm, proposed in [4] to demonstrate how our algorithms work effectively in reliability constraint environments. MPCR and CASNCP are designed to construct the optimum route which requires the minimum end-to-end transmission power while guaranteeing certain throughput. MPCR applies the cooperative communication while constructing the minimum-power route using any number of the proposed cooperation-based building blocks. CASNCP algorithm is similar to most of the existing cooperative routing algorithms: first constructs the conventional shortest-path route then applies a cooperative-communication protocol upon the established route. Both MPCR and CASNCP adopt power allocation algorithm. In our simulation, 50 nodes are randomly distributed in a 200 m * 200 m square area. The transmission range of each node is 80 m. The simulation parameters are the same as previous works (e.g., [14]). The position of the source node and the destination node is (10,10) and (190,190), respectively. The target end-to-end transmission success probability is
Figures 4 and 5 demonstrate the total end-to-end transmission power (including the energy consumed by senders and relays) and corresponding energy saving of each algorithm. From Figure 4, we can see that MPCS-CT outperforms the other schemes by at least 2 dbm, and the gap between MPCS-CT and MPCS-DT is getting larger when the reliability constraint is harder. Figure 5 further demonstrates the energy saving of the MPCS-CT to other schemes. Compared to MPCR, MPCS-CT is able to save 23% energy, mainly due to the cross-layer optimization for end-to-end reliability constraint instead of throughput. Compared to CASNCP, 45% energy saved due to not only the reliability consideration, but also the joint optimization of routing and relay selection, since CASNCP finds a shortest-path route first and then builds the cooperative route based on the shortest-path one. Compared with MPCS-DT, MPCS-CT can save more than 61% energy when the target end-to-end reliability is above 70% due to the cooperative diversity. The gap of transmission power between the MPCS-DT and MPCS-CT rises as the required end-to-end success probability increases. The reason lies in the nature of the cooperative diversity. When the end-to-end reliability requirement becomes stringent, more power is needed for both DT and CT mode to raise the SNR of each link in the transmitted path. However, for CT mode, the SNR of both direct transmission channel and relay channel are improved. Since these two channels are independent, total transmission reliability rises quickly. Thus, less power is needed in cooperative mode to enhance the reliability. As we can see, if the reliability requirement is further relaxed, the transmission power of CT will eventually exceed DT due to the cost of implement of cooperation. From Figures 4 and 5, we can see that a tradeoff exists between the reliability constraint and the transmission power minimization.

Required total transmission power versus the desired end-to-end transmission reliability.

The energy saving of transmission power between different algorithms versus the required end-to-end success probability.
Figures 6 and 7 demonstrate the total transmission power with respect to the number of nodes in the network and the required transmission rate. As Figure 6 shows, when network size rises up, the needed transmission power decreased. It can be easily understood because the denser the network is, the smaller the average distance between the nodes is, and thus less transmission power is needed. Figure 7 shows that as the required data rate increases, the needed total transmission power also increases. However, when the data rate increases, the energy saving of MPCS-CT to MPCS-DT decreases slightly. This is because when the required data rate

Required total transmission power versus the network size.

Required total transmission power versus the transmission rate.
5.3. Comparison for Max-Lifetime Algorithms
For comparison, we consider three different schemes: (1) max-lifetime cross-layer scheme with direct communication (namely MLCS-DT) and (2) max-lifetime cross-layer scheme with cooperative communication (namely MLCS-CT) and (3) greedy power allocation and cost-based routing (namely GPA-CR). GPA-CR is a cross-layer strategy designed for lifetime maximization in wireless sensor network, proposed in [5]. GPA-CR first construct the route from the source to the destination by selecting the path with the least cost and then adjust the power level incrementally node by node until the end-to-end success probability becomes equal to or larger than the target value. The routing cost in GPA-CR is proportional to the transmission power and inversely proportional to a weighted residual energy.
The simulation scenario is the same as the simulation for min-power algorithms. The difference is that 20% sensor nodes in the network are randomly selected as data sources, each transferring a data flow to the destination which is located in (190,190). The data source always generates data until it dies. A TDMA MAC is applied in our simulation. The frame is divided into 100 time slots. Every node is active in its assigned time slots for transmitting or receiving data and remains asleep in the rest of the frame. The parameters of sensor nodes are
Figure 8 shows the network lifetime with respect to the target end-to-end success probability when different strategies are applied. As we can see, MLCS-CT yields much longer network lifetime than the other two schemes. There are several reasons to explain the network lifetime enhancement. First, cooperation can reduce the required transmission power of the nodes due to the spatial diversity. Second, for a particular flow, cooperation can make more nodes involved in transmission of the data packets, which make the traffic load more balanced. Particularly, in our algorithm, cooperation can make the traffic automatically bypass the heavy-loaded and energy-draining nodes. Note that the GPA-CR constructs the route first and adjust power step by step rather than optimize the routing and power jointly. This algorithm incurs additional performance loss. We also observe that the network lifetime decreases as the desired end-to-end success probability increases. It happens because the needed transmission power deceased as the reliability constraint gets relaxed, thus resulting in prolonged network lifetime. However, the curve of GPA-CR becomes flat when the target end-to-end success probability reaches a high level (more than 0.8), because the power of nodes in GPA-CR has a maximum constraint. The figure demonstrates the tradeoff between network lifetime maximization and the reliability constraint.

The network lifetime for cooperative and direct transmission versus the desired end-to-end success probability.
Figure 9 plots the network lifetime with respect to the number of nodes distributed in the network. The effects of variance of network size are twofold. On the one hand, when the number of nodes increases, the number of data sources also goes up, thus leading to more traffic in some nodes and shortened network lifetime. On the other hand, when the network size increases, nodes are getting closer, leading to decreased transmission power and prolonged network lifetime. As figure shows, the former effect outweighs the latter effect, especially in the cooperative mode. The reason is that the energy expenditure of the node near to the sink is approximately proportional to the number of sources but approximately proportional to the square root of the network size. For cooperative communication, it is even more insensitive to the variation of the length of links caused by the change of network size. Figure 10 presents the network lifetime with respect to data rate when different algorithms are applied. As expected, network lifetime decreases as the transmission rate goes up, but our algorithms are more sensitive to the data rate since it influences the transmission power of nodes.

The network lifetime for cooperative and direct transmission versus the network size.
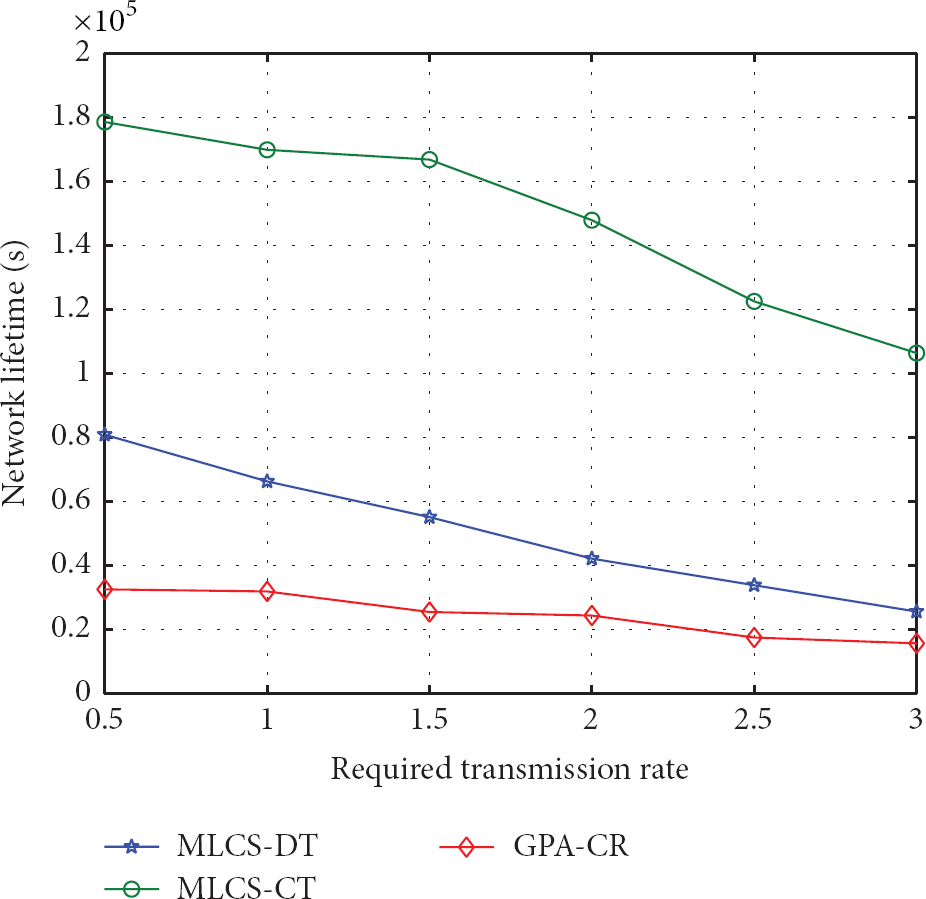
The network lifetime for cooperative and direct transmission versus the data rate.
5.4. Simulation for Different Parameters
In this simulation, we will investigate the effect of several parameters on the performance of our min-power algorithms: MPCS-DT and MPCS-CT. The simulation scenario is that N sensor nodes are randomly distributed in
First, we study the effect of the QoS requirement
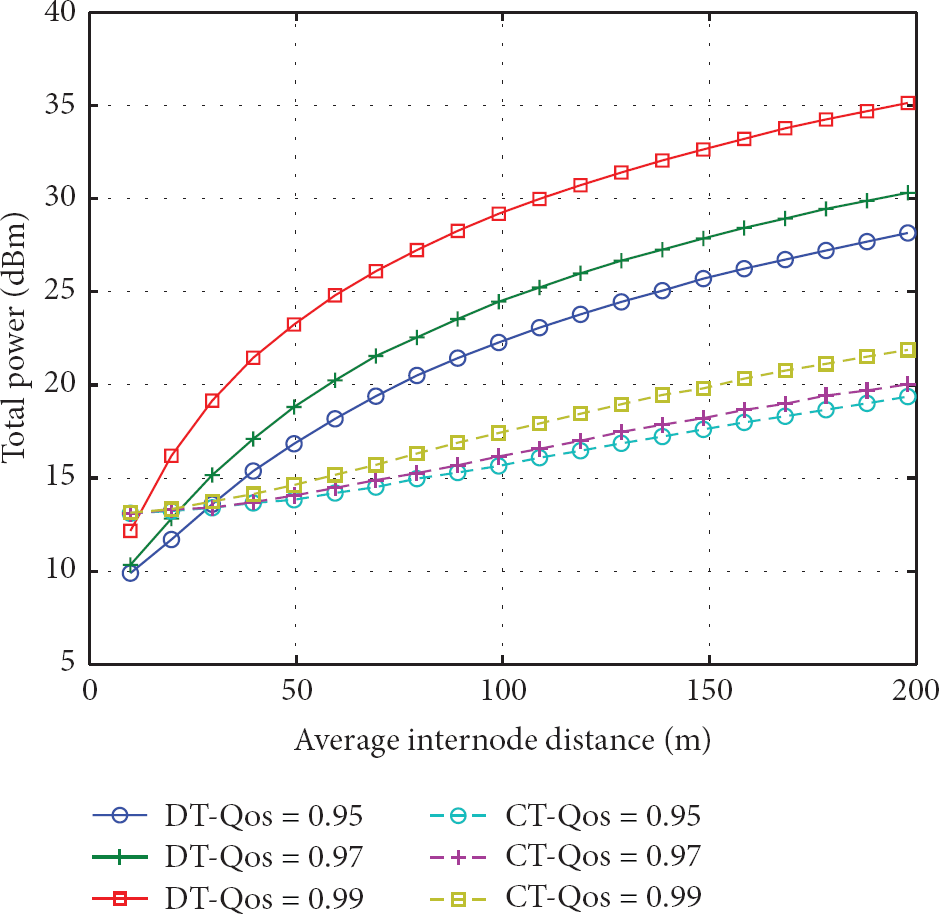
Required total power versus the average internode distance for different values of required end-to-end reliability.
Next, Figure 12 depicts the multiple relays scenario for different values of end-to-end reliability

Required total power versus the number of relays for values of required end-to-end reliability.

Required total power versus the average internode distance for different values of receiving power.
Finally, we study the effect of varying the receive power
6. Conclusion
In this paper, we developed several cross-layer algorithms for energy efficient and reliable data transfer in wireless sensor networks using cooperative diversity. We investigate the problem of how to minimize transmission power consumption and maximize the network lifetime while guaranteeing the end-to-end success probability. Noting that the energy efficiency and the reliability in wireless sensor networks depend on the features of each layer: the power control in the physical layer, the relay selection in the MAC layer, and the routing protocol in the network layer, we have designed cross-layer strategies by considering them jointly. We have proposed the MPCS-CT algorithm, which applies the cooperative communication and constructs the minimum-power route while guaranteeing certain end-to-end transmission reliability. We have also presented the MLCS-CT algorithm, which aims to maximize network lifetime under the reliability constraint. Our algorithms can be implemented distributively. We have shown through simulation results that for random networks, the power savings of the MPCR algorithm with respect to the recently proposed minimum-power routing algorithms MPCR and CASNCP are 23% and 45%, respectively. Compared with noncooperation algorithm MPCS-DT, MPCS-CT saves more than 60% power when the required end-to-end success probability is above 70%. For the max-lifetime algorithm, we compared our proposed algorithm MLCS-CT to other two algorithms: MLCS-DT and GPA-CR. The results also showed that our algorithm outperforms the other two algorithms by 2–4 times. The reason lies in the benefit of cooperation by reducing transmission power and balance traffic load. We further demonstrate the effect of several parameters such as reliability constraint, number of relays, network size, and data rate to the algorithms, which shows our algorithm is more sensitive to the variance of network size and data rate and performs better when high QoS is required. Our future work includes removing some constraints such as the equal power allocation between source and relay and applying our algorithms in other cooperative schemes such as AF and CF. We will also perform further tests to validate the proposed algorithms.
Footnotes
Appendices
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work has been sponsored under the National Nature Foundation of China (Grant no. 61303240), the Funding Scheme of Key Laboratory of Wireless Sensor Network & Communication, and Chinese Academy of Sciences (Grant no. 2013004), and it is also supported in part by the President Fund of University of Chinese Academy of Sciences (Grant no. Y35102JN00).