
Abstract
A roadside guardrail may be constructed near slopes. The desired safety behavior is ensured not only by the guardrail structure itself, but also by the interaction between soil and guardrail post. In the case of horizontal ground, the elastic Winkler spring model and the p-y curve approach can be used to estimate the soil-post interaction by the finite element method. However, it is difficult to apply those models with the sloping ground cases unless sufficient experimental data are given through the single post impact tests. This paper evaluates, using LS-DYNA software, the vehicle impact performance of flexible barriers made of steel W-Beam guardrails in sloping ground that are also supported over three different types of post configurations. The dynamic performance is tested in terms of maximum deflection, absorbing impact energy, and occupant risk index according to post types.
1. Introduction
Many safety barriers that protect vehicle occupants in roadside accidents are installed near the sloping ground and are supported by the passive resistance of guardrail post. The guardrail system, especially deformable guardrail post, is exposed to considerable lateral loads due to vehicle collision. To provide appropriate safety of vehicle occupants on impact, the safety barriers should be designed so as to absorb impact energy as much as possible through their deformation and concurrently maintain their integrity. To ensure such a deformable guardrail with the safety behavior desired in accident, the soil-post interaction is an important issue to be investigated. The theoretical background of soil-post interaction is based on the theory of laterally loaded pile embedded in horizontal ground that has received considerable attention over the past several decades [1, 2].
In general, the elastic spring model and p-y curve approach are common tools to model the laterally loaded piles or guardrail posts embedded in horizontal ground by the finite element method. The p-y method is based on the numerical solution of beam-on-elastic foundation, where the structural behavior of a drilled shaft is modeled as a beam and the soil-shaft interaction is represented by discrete, inelastic springs characterized by p-y curves [3, 4]. However, two models cannot be extended to sloping ground since the spring constants for elastic or inelastic cases have not been clearly investigated. The variation of passive resistance depending on ground slop is very significant for sloping ground. Recently, some developments towards the analysis of piles in sloping ground have been made either by experiments in laboratory [3, 4] or by numerical analysis [5, 6]. Results indicate that ground inclination significantly affects ultimate load p u of the p-y curves according to loading direction, angle of inclined pile and soil density, and so forth.
As mentioned before, the available methods of analysis for laterally loaded guardrail posts in horizontal ground cannot be directly applied to the laterally loaded guardrail posts in sloping ground. The field test is the best option for investigating the post response for varying slope angles, but it is not cost-effective. Even though scaling effects influence results of model tests, the computer simulation of numerical model would be an alternative to field test to analyze the soil-post interaction of laterally loaded guardrail posts in sloping ground [7, 8]. The simulation of the appropriate field condition is also a challenging task while using the commercially available software, LS-DYNA. The input data of FHWA soil are used in this study [9]. Material FHWA Soil (MAT147) in LS-DYNA software is developed by the Federal Highway Administration for applications involving road-base soils. For this purpose, the 3D soil-material model is used to model the three-dimensional sloping ground. Also, the dynamic performance of flexible barriers made of steel W-Beam guardrails is supported over three different types of post configurations. These types include one open section (C-shape post) and two closed sections (circular shape and square shape posts). The strength capacity of barriers and the impact severity of occupant have been estimated by deformation as well as occupant risk indices.
2. Finite Element Modeling
2.1. Soil-Post Model
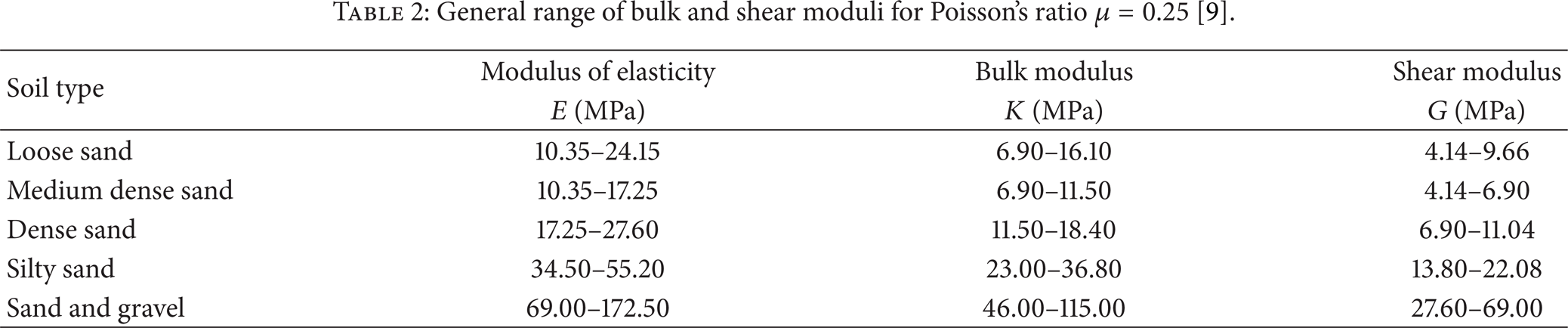
The material model for the soil is based on FHWA Soil (MAT147) in LS-DYNA [10] that has been developed by the Federal Highway Administration for applications involving road-base soils. Initial parameters for material type 147 are selected from LS-DYNA models provided by the developer. These models included two triaxial compression tests and a hydrostatic tension test. This material model has been developed specially to predict the dynamic performance of the foundation soil in which roadside safety structures are mounted when undergoing a collision by a motor vehicle. Though a total of twenty-four input parameters should be required, only twelve main input parameters for the soil model are shown in Table 1 that include the density at an initial state, bulk and shear moduli, compaction curve, and a yield surface. Table 1 has been slightly modified from baseline material parameters given by model developer of FHWA soil [9]. In particular, the elastic modulus E is assumed to be 18 MPa from Yoshida et al.'s SPT test results [11]. The stiffness parameters K and G are also modified according to E that may belong to the range of dense sand in Table 2. As evidenced in direct shear tests, there is a gradual decrease in shear strength after the peak. Thus the residual shear strength, PHIRES denoted in Table 1, is assumed as 80% of peak value. Since the Mohr-Coulomb failure criteria are used, values for cohesion and the angle of internal friction should be determined through direct shear testing or triaxial compression tests.
Modified material parameters in FHWA soil material model.

RO: mass density (kg/mm3); NPLOT: plotting options.
SPGRAV: specific gravity of soil used to get porosity.
RHOWAT: density of water in model units (kg/mm3).
VN: viscoplasticity parameter (strain-rate enhanced strength).
K: bulk modulus (MPa); G: shear modulus (MPa).
PHIRES: the minimum internal friction angle, radians (residual shear strength).
INTRMX: maximum number of plasticity iterations.
MCONT: moisture content of soil (determines amount of air voids).
ECCEN: eccentricity parameter for third invariant effects.
COH: cohesion shear strength at zero confinement (MPa).
General range of bulk and shear moduli for Poisson's ratio μ = 0.25 [9].
The geometry of soil analyzed is illustrated in Figure 1, which shows a post of length L and width D placed at the near crest of a slope. The eight-node hexagonal solid and six-node triangular prism elements are used to consider the sloping ground domain to be capable of modeling soil continuity, post-soil interface behavior, and three-dimensional boundary conditions. The bottom boundary of the 3D mesh shown in Figures 2, 3, and 4 is fixed in all directions and the vertical boundaries are fixed only in the normal direction. The top and inclined surfaces are not constrained. The gravity loading of soils is considered. On the other hand, the steel post is modeled using shell elements and piecewise-linear-plasticity model (MAT24) [10] that will be precisely explained in the next section. The eight-node quadrilateral interface elements are used for the post-soil interface [12]. Instead of an approximation of the three-dimensional stress strain state by continuum elements, the interface of post and soil is discretized by the interface element based on traction-separation model with two degrees of freedom (normal tangential directions). In other words, the constitutive behavior must be formulated between the interface tractions and the displacement jumps that can represent the differences of the displacement at the surfaces of the soils. Details of interface element available in LS-DYNA are explained in [12]. Figure 1 shows a schematic diagram of a laterally loaded post embedded completely in the 1: 1.5 sloping ground inclined to the horizontal line. The steel W-Beam guardrails are supported over three different types of post configurations. These types include one open section (C-shaped post) and two closed sections (circular shaped and square shaped posts). For the sake of convenience, three different post shapes are classified from Cases 1–3 as shown in Figures 2–4. The cross-section of the post has been considered by a width D. In case of two closed sections, D represents a square side and diameter of circle. On the other hand, the height of web for an open section is determined by 150 mm. The layouts of three guardrails are determined on the basis of the same cross-sectional area as shown in Table 3 and Figure 5. The 500 mm overlap length in reference to the ground level is also considered with twice length of 4.5 mm post thickness to increase the flexural strength to vehicle collision or to prevent the seriously large deformation at the ground level, for instance, the inner steel tubes with 4.5 mm thickness and 500 mm overlap length slide into the circular shaped and square shaped posts, respectively. Thus total embedded length of post is 1500 mm. Also the geometric dimensions of three posts are presented in Table 3.
Dimension of three different posts.


Problem definition of a laterally loaded post in sloping ground.

Case 1 (circular shape).
Case 2 (C-shape).

Case 3 (square shape).

Layout of steel guardrail posts considered in this study.
2.2. W-Beam Guardrail Model
The safety barrier parts consist of the guardrail, the posts, and distance spacers shown in Figures 2–5. The W-shaped, galvanized 4 mm steel sheet metal is attached to 4.5 mm thick steel posts using two different distance spacers. Along the whole length of 40 m guardrail system, 20 posts and distance spacers are placed 2 m apart. The posts are embedded 1500 mm into the ground, and the end terminals are neglected. The sheet metal of guardrail system is a type of mild steel with yield strength (σ y = 230 MPa) and elastic modulus (E = 200 GPa). The W-Beam guardrail is modeled with full-integration shell elements with five integration points through shell thickness to prevent the hourglass mode due to impact loading. On the other hand, the four-node Belytschko-Tsay shell finite elements with three integration points through the thickness are used for posts and distance spacers to reduce the computational time. Bolt connections are modeled by nodal rigid joint option (*CONSTRAINED_NODAL_RIGID) in LS-DYNA. An isotropic piecewise linear plasticity model has been adopted, and material failure is introduced by defining the ultimate effective plastic strain denoted by 0.28. Due to high impact loadings, the material models employ kinematic hardening rule and Cowper-Symonds strain rate dependency. The following equation is suggested by Cowper and Symonds [13] to describe the material behavior at a different strain rate:

In the structural crash analysis in the field of road and vehicle safety, typical values of strain rate range from 10−4 to 1000 s−1 where σ′ and σ are dynamic and quasistatic stress, respectively;
Four different contact options are used in the finite element model such as contact between safety barrier parts, vehicle parts, impacting parts of vehicle-barrier, and wheels of vehicle-ground. The static and dynamic frictions in the first three contact definitions are set to 0.2 and 0.15, respectively. In the fourth contact problem, both friction coefficients are set to 0.3 [14]. No constraint condition was used at the end of 40 m guardrail system.
The finite element vehicle models shown in Figure 6 for crash test originate from publication library of the National Crash Analysis Center (NCAC). The vehicle wheels are modified to enable their rotational movement that is very important during the vehicle impact since the vehicle wheel is in direct contact with the barrier. The wheel tire is modeled using LS-DYNA airbag model with internal pressure. A rigid shell element has been added at the vehicle gravity center to act as an accelerometer and to record the kinematic quantities in the vehicle local coordinate system [14]. There are two vehicle models. The 8-ton truck impacts the W-Beam guardrail system with a speed of 65 km/h and an angle of 15 degrees to estimate the structural adequacy. This model is comprised of approximately 30,000 nodes and 27,500 elements (see Table 4). The 1.3-ton car is tested to evaluate the occupant risk at an angle of 20 to the safety barrier and the initial velocity is equal to 85 km/h. The initial and boundary conditions are followed by Korean Standard for Road Safety Structures that is equivalent to MASH [15] and EN-1317 [16].
Number of nodes and elements for vehicle model.


The finite models used in crash simulation.
3. Numerical Results
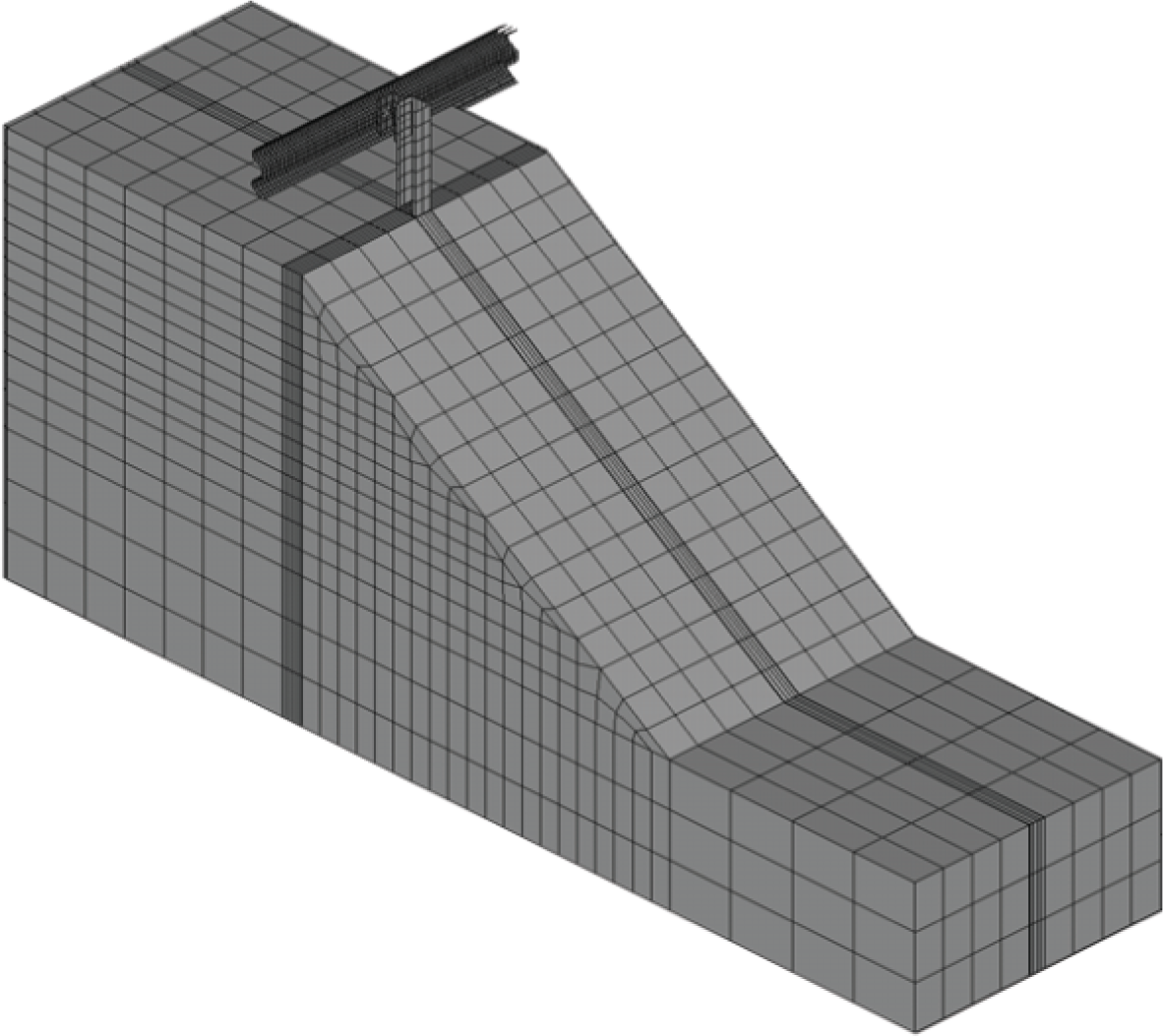
Three identical posts are tested with an 8-ton truck at an impact speed of 65 km/h. The finite element simulation is performed for a maximum time of 600 ms and a time step of 2.0 μs using the nonlinear FE code LS-DYNA. The FE model of guardrail, post, and sloping ground is presented in Figure 7. This guardrail system model excluding vehicle model is comprised of 222,249 nodes and 204,680 elements for Case 1, 149,637 nodes and 134,880 elements for Case 2, and 137,680 nodes and 126,900 elements for Case 3, respectively. As we are aware of it, the number of FE elements for a vehicle should be the same. However, the FE mesh design is dependent upon three Cases since the guardrail system including rail part, post, and distance spacer is different from each other. Also, the shape of post can affect the mesh design of the soil.

FE model for W-beam guardrail system in sloping ground.
Deformed shapes of the guardrail system during vehicle impact are investigated with an 8-ton truck at an impact speed of 65 km/h. Also, maximum deflections of beam and post for three guardrail post configurations are calculated. It is observed that in all cases the danger of tire snagging is not faced regardless of the type of posts used. While Figures 8 and 9 show the deformed shape for different post conditions not only for horizontal ground but also for sloping ground, it can be noted that guardrail system with Case 1 post provides the least deformation; however, Case 2 post shows the largest lateral movement. The same tendency is identified for both horizontal ground and sloping ground. In other words, the post with open section type (Case 2) generally exhibits larger deformation due to severe torsion than other posts with closed sections (Case 1, Case 3). As a supplementary explanation, the hour glass mode due to severe distortion of the soil mesh is generally controlled by *CONTROL_HOURGLASS command available in LS-DYNA program [10]. These tendencies have been easily identified from the displacement-time history plotted in Figures 10 and 11. As shown in Table 5, it is noted that the passive resistance for sloping ground shows approximately 30% decrease as compared with that for horizontal ground when the ground slope is 1: 1.5 since the maximum deflections of posts are related to the passive resistance of ground.
Comparison of maximum deflection of three different posts (unit: mm).


Deformed shapes of the guardrail system during vehicle impact in horizontal ground.

Deformed shapes of the guardrail system during vehicle impact in sloping ground.

Displacement-time history for different posts embedded in horizontal ground.
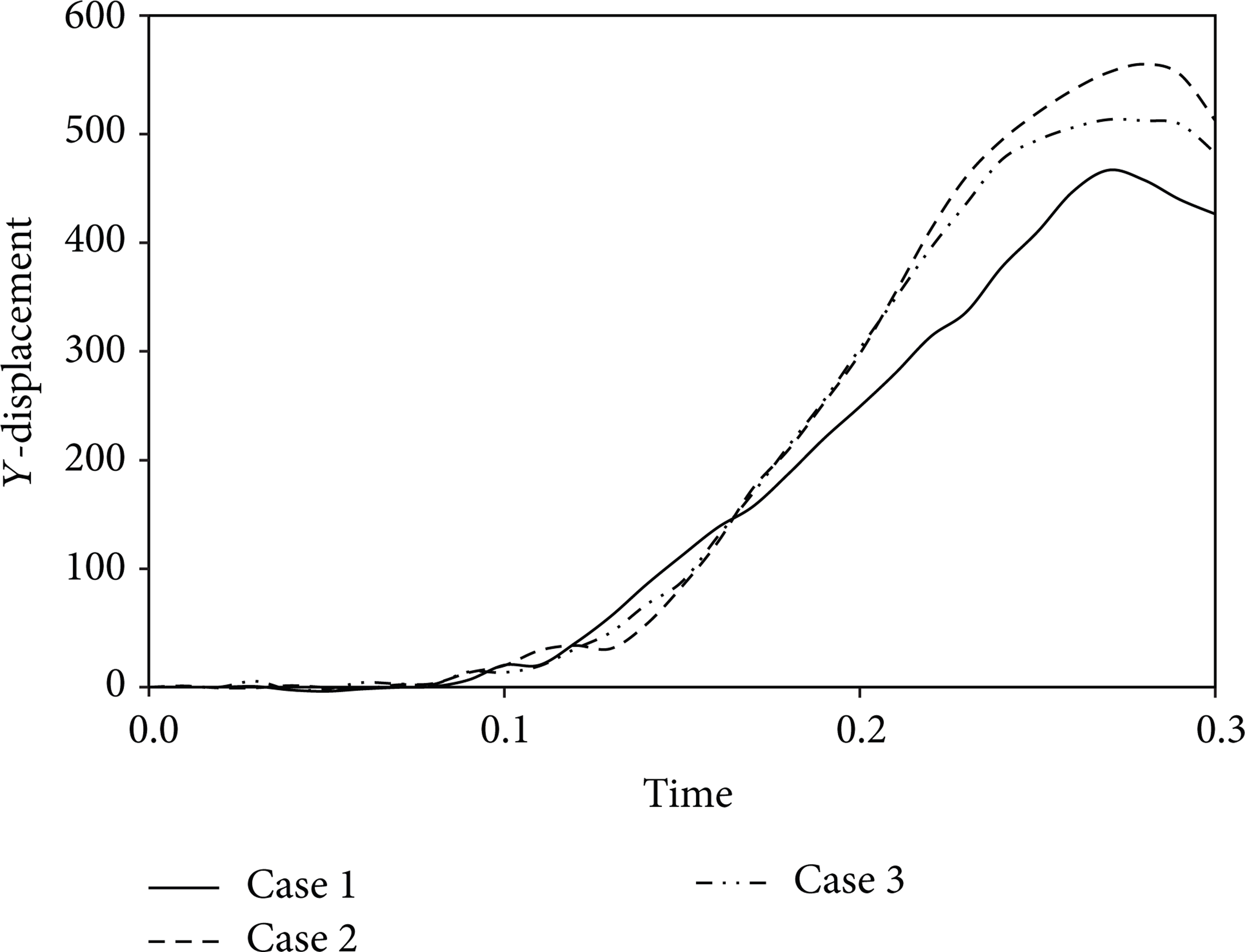
Displacement-time history for different posts embedded in sloping ground.
The deformation of safety barriers during impact tests is characterized by the dynamic deflection and by the working width. It is important that the deformation should be compatible with the available space or distance behind the system. The working width (W) is the distance between the side facing the traffic before the impact of the road restraint system and the maximum dynamic lateral position of any major part of the system. The working classes according to EN-1317 standard [16] are presented in Table 6 using working width values with respect to three different posts. A higher working class for Case 2 is expected as W3 to be consistent with previous findings on the basis of displacement-time history graphs. Other working classes for Case 1 and Case 3 are determined by W2 due to relatively small deformations.
Horizontal of working width for different post configurations.

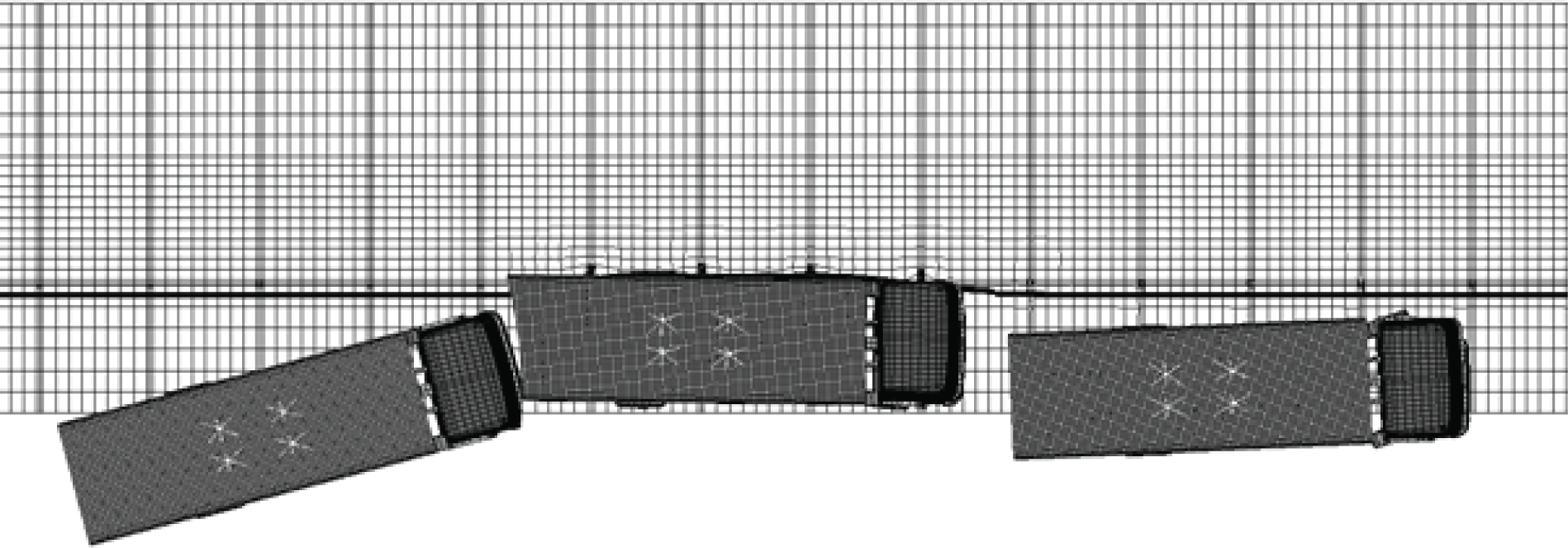
Also, the results of computational simulations are shown in Figures 12, 13, and 14. Those figures show the vehicle trajectory and the deformation shape of safety barriers when the 8-ton truck impacts the W-Beam guardrail system with a speed of 65 km/h and an angle of 15 degrees. The exit angles for Cases 1–3 are calculated by 6.9°, 8.1°, and 7.1°, respectively, which are lower than 60% of impact angle.
Vehicle (8 tons) trajectory during the vehicle impact for Case 1.

Vehicle (8 tons) trajectory during the vehicle impact for Case 2.

Vehicle (8 tons) trajectory during the vehicle impact for Case 3.
Figure 15 shows the internal absorbed energy of guardrail system for different post configurations. It can be observed that guardrail system with C-shape (Case 2) provides the maximum energy absorption. This may be attributed to the fact that the deformation shape of Case 2 is more significant as compared with other cases. Thus overall internal absorbed energy is influenced by bending action as well as more severe torsion of C-shaped post. On the other hand, it is also observed that guardrail system with rectangular shape (Case 3) absorbed more energy than the circular shaped guardrail system (Case 1).

Internal absorbed energy of the guardrail for different post configurations.
The impact severity parameters or occupant risk indices of the safety barrier with different post conFigurations as well as ground conditions are computed in Table 7 when the 1.3-ton car is tested at an impact angle of 20 and the initial velocity is equal to 85 km/h. The impact severity parameters, denoted by OIV (occupant impact velocity), RA (ridedown acceleration), THIV (theoretical head impact severity), PHD (postimpact head deceleration), and ASI (acceleration severity index) of all evaluated designs, are below the limiting values as mandated by MASH [15] and EN 1317 [16] standards. It is noted that guardrail system with C-shape (Case 2) exhibits the lowest values not only for horizontal ground but also for sloping ground. It is also observed that the impact severity parameters for sloping ground generally are less than those for horizontal ground.
Impact severity parameters for horizontal ground and sloping ground.

4. Conclusions
This paper presents computer simulations for different types of guardrail systems embedded in horizontal ground as well as sloping ground and their interaction with soil during vehicle impacts using the proposed three dimensional soil-post models. The post type is proved to be a fundamental component of a guardrail system. According to the simulation results, the following conclusions have been drawn.
The decrease of passive resistance of guardrail post is more significant for sloping ground due to ground slope. It is noted that the passive resistance for sloping ground shows approximately 30% decrease as compared with the horizontal ground condition when the ground slope is 1: 1.5.
The danger of tire snagging is not faced regardless of different post configurations.
It is noted that guardrail system with circular shaped post (Case 1) provides the least deformation; however, C-shaped post (Case 2) shows the largest lateral movement. The same tendency is identified for both horizontal ground and sloping ground.
It can be observed that guardrail system with C-shaped post (Case 2) provides the maximum energy absorption. This may be attributed to the fact that the distortional tendency of Case 2 is more significant as compared with other cases.
A higher working class for Case 2 is expected as W3 to be consistent with previous findings on the basis of displacement-time history graphs. Other working classes for Cases 1 and 3 are determined by W2 due to relatively small deformations.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
This work was supported by National Research Foundation of Korea (NRF) grant funded by the Korea government (MEST) (NRF-2013R1A1A2057756).