
Abstract
This paper develops an efficient bi-iterative source location and propagation speed estimation method utilizing time difference of arrival (TDOA) measurements. The source location and propagation speed estimation is a nonlinear problem due to the nonlinearity in the TDOA measurement equations. The newly developed bi-iterative method computes the source location and propagation speed alternately. The asymptotic convergence of the new bi-iterative method is theoretically analyzed. First-order perturbation analysis is applied to the newly developed solution to derive its bias and variance. The first-order analytical results show that the proposed method provides approximately unbiased source position and propagation speed estimates for low noise levels and the accuracy of these estimates approaches the Cramer-Rao lower bound (CRLB). The extension of the new bi-iterative method to the more general situation where the sensor locations are subject to random errors is also presented. Simulation studies are given to show the good performance of the proposed method.
1. Introduction
Passive source localization using time difference of arrival (TDOA) measurements has received considerable attention and has been widely applied in target tracking [1, 2], navigation [3], sensor networks [4, 5], and wireless communications [6, 7]. In the past decades, a number of efficient algorithms such as those in [5–9] were presented for TDOA-based source localization. Nevertheless, all these works assume that the signal propagation speed is known a priori so that the obtained TDOA measurements can be converted into range differences for source positioning. In practical applications such as seismic exploration [10], tangible interface for human-computer interaction [11], and underwater acoustic [12], the propagation speed is unknown and depends strongly on the propagation medium. In this case, the unknown propagation speed needs to be estimated jointly with the source location. For this problem, Mahajan and Walworth [13] proposed an unconstrained least-squares (LS) method, in which the nonlinear TDOA measurement equations are converted into pseudolinear ones by introducing two auxiliary variables. The source location and two auxiliary variables are then jointly estimated in LS sense. Reed et al. [14] selected the LS solution as the starting value and developed a four-step method which alternately estimates the source location and propagation speed. Recently, Zheng et al. [15] proposed a three-stage approach to simultaneously compute the source location and propagation speed. Very interestingly, the accuracy of the source location and propagation speed estimates approximates the CRLB for sufficiently small noise conditions. A disadvantage of this three-stage method is that it produces two results, where only one is the true solution. Furthermore, it may generate complex solutions when finding the square root in its last stage. Annibale and Rabenstein [16] investigated the influence of a wrongly presumed propagation speed because of temperature variations on the positioning accuracy of two well-known location methods. Oyzerman and Amar [17] extended the spherical intersection (SX) technique in [5] to the joint source position and propagation speed estimation. Annibale and Rabenstein [18] derived two closed-form methods for estimation of the propagation speed using time of arrival (TOA) and TDOA measurements.
However, these works [13–18] mentioned above are based on the assumption that the sensor locations are accurately known. This assumption may be sometimes invalid in modern practical scenarios; for example, in wireless sensor networks (WSNs), the sensors are frequently localized level by level [19]. Due to this level-by-level procedure, the sensor locations generally include random errors in which case the sensor location errors need to be taken into consideration [20]. In this paper, we propose an efficient bi-iterative source position and propagation speed estimation method using TDOA measurements and compare its performance with the LS solution [13], four-step method [14], three-step weighted least-squares (WLS) method [15], and the CRLB. Our contributions include the following.
We develop an efficient bi-iterative method for the source position and propagation speed estimation.
The asymptotic convergence of the new bi-iterative estimation method is analyzed.
The proposed solution is shown to approach the CRLB for low Gaussian TDOA measurement noise levels.
We study the CRLB of the source position and propagation speed with sensor location errors and extend the bi-iterative method to the more general case where the sensor locations are subject to random errors.
The remainder of the paper is structured as follows. Section 2 describes the problem of computing source position and propagation speed under a Gaussian TDOA noise model. Development of the new bi-iterative estimation method is presented in Section 3. Besides, the asymptotic convergence and approximate efficiency of the bi-iterative method are analyzed under low noise level conditions. Section 4 extends the bi-iterative estimation method to the general situation where the sensor locations are subject to random errors. Simulation studies are given in Section 5 to validate the theoretical analysis and to test our bi-iterative estimation method's performance. Section 6 concludes the paper.
Throughout the paper, we utilize boldface lowercase letters to stand for vectors and boldface capitals to represent matrices.
2. Problem Formulation
Consider a two-dimensional plane where a sensor array is composed of M sensors at exactly known locations
Denote by

Without losing generality, we set the first sensor to be the reference sensor. The TDOA measurement obtained from sensor pair

where
Equation (2) can be arranged into matrix form

where
Notice that TDOA measurement equations (2) are not linearly related to the source position
3. Bi-Iterative Estimation Method
3.1. Bi-Iterative Source Position and Propagation Speed Estimation Method
Achieving high source position and propagation speed estimation accuracy is far from being straightforward due to the nonlinearity implied in the TDOA localization equations. According to (2), the TDOA measurement equation can be rearranged as

By stacking (4) for

where
The source position

where
Firstly, let us consider the situation where the source position

where

where the coefficients are
Secondly, consider another situation where the propagation speed c is fixed; we arrive at

where
where
where

The minimization problem (12) is just as difficult to solve as problem (10) because of the nonconvexity in the second equality constraint. Thus, replacing the equality constraint

That is to say, the nonconvex optimization problem in (9) is transformed into a convex one. The optimal value of (13) is less than or equal to the optimal value of (12), since we minimize the same cost function over a larger set. The global optimum can be obtained by applying existing numerical methods, for instance, the interior-point methods.
Based upon the above analysis, the procedures of the proposed bi-iterative method for source position and propagation speed estimation are given as follows.
Obtain the initial source position and propagation speed estimates
For
Put
Substituting
3.2. Asymptotic Convergence
Here, we show that the bi-iterative estimation method has asymptotic convergence. It is apparent that the cost function

Using the fact that

where
Thus, for
3.3. Performance Analysis
We evaluate the bias and covariance matrix of the source position and propagation speed estimates

where
Ignoring the perturbations that are of higher order than 1, we have
where the fact that

where

We have

Note that
4. Algorithm Extension
In practical environments, the sensor locations need to be measured and generally include random errors. In this section, we first examine the increase in the CRLB of the source position and propagation speed due to sensor location errors and then extend the bi-iterative method to the situation where the sensor locations are subject to random errors. Let
4.1. CRLB
We obtain the CRLB of

where

where

The term
4.2. Algorithm Extension
The true sensor locations

where the second-order error terms have been neglected.
It is noteworthy that the variable

where

Stacking (27) for

where

Then we have the following cost function:

where the weighting matrix is defined as
Once the cost function
5. Simulation Study
In this section, a set of Monte Carlo simulations are carried out to assess the bi-iterative method's performance by comparing with the LS solution [13], the four-step method [14], the three-step WLS method [15], the CRLB, and the theoretical bias [28]. We simply follow [15] to consider a tangible acoustic interface application of interactive displays [29]. Five sensors are placed on a 1 m × 1 m glass pane with coordinates
5.1. Localization Performance without Sensor Location Errors
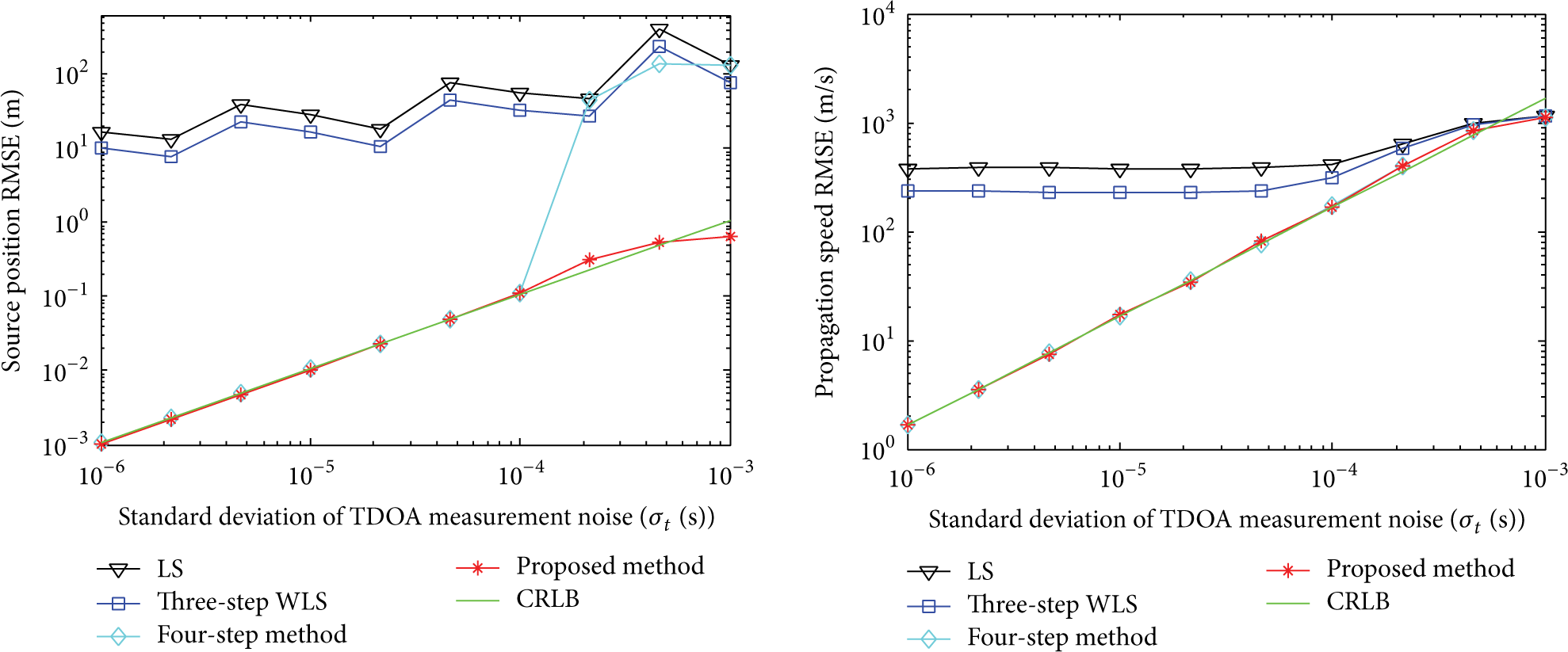
We first examine the performance of the bi-iterative estimation method when there exists no sensor location error. Figure 1 plots the estimation RMSEs versus

Comparison of the source position and propagation speed estimation RMSEs of the LS solution, the three-step WLS, and four-step and bi-iterative methods versus
Figure 2 compares the estimation biases of the bi-iterative method with the remaining three methods and the theoretical bias [28] for source at

Comparison of the source position and propagation speed estimation biases of the LS solution, the three-step WLS, and four-step and bi-iterative methods versus
Figures 3 and 4 show the estimation RMSE results for two sources at
Comparison of the source position and propagation speed estimation RMSEs of the LS solution, the three-step WLS, and four-step and bi-iterative methods versus

Comparison of the source position and propagation speed estimation RMSEs of the LS solution, the three-step WLS, and four-step and bi-iterative methods versus
Figures 5 and 6 plot the estimation RMSE results of the bi-iterative and four-step methods versus the iteration number for sources at

Comparison of the source position and propagation speed estimation RMSEs of the bi-iterative and four-step methods versus iteration number for source at

Comparison of the source position and propagation speed estimation RMSEs of the bi-iterative and four-step methods versus iteration number for source at
In the following, we evaluate the computational complexity of the bi-iterative method. In step
5.2. Localization Performance with Sensor Position Errors
Here, we investigate the CRLB of source position and propagation speed and evaluate the bi-iterative method's performance with sensor location errors. The sensor location errors at different sensors are set to be unequal to make the comparison more general, where

Comparison of the CRLB of the source position and propagation speed with and without sensor location errors versus
We set

Comparison of the source position and propagation speed estimation RMSEs of the bi-iterative method and the LS solution versus
We next keep

Comparison of the source position and propagation speed estimation RMSEs of the bi-iterative method and the LS solution versus
6. Conclusions
The problem of estimating the source location and the propagation speed using TDOA measurements was considered in this paper. Using the bi-iterative scheme, an efficient method that alternately computes the source position and propagation speed is developed. The asymptotical convergence of the proposed bi-iterative estimation method is analyzed. The proposed method is shown by first-order perturbation analysis to approach the CRLB for low noise levels. In contrast to other existing estimation methods, the threshold effect of the new bi-iterative method occurs later as the measurement noise increases. Simulation studies are given to illustrate the effectiveness of the proposed bi-iterative method.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.