Optimizing the design of tracking system under energy and bandwidth constraints in wireless sensor networks (WSN) is of paramount importance. In this paper, the problem of collaborative target tracking in WSNs is considered in a framework of quantized measurement fusion. First, the measurement in each local sensor is quantized by probabilistic quantization scheme and transmitted to a fusion center (FC). Then, the quantized messages are fused and sequential importance resampling (SIR) particle filtering is employed to estimate the target state. In the FC, quantized measurement fusion via both augmented approach and weighted approach is investigated. For both approaches, the closed-form solution to the optimization problem of bandwidth scheduling is given, where the total energy consumption is minimized subject to a constraint on the fusion performance. Finally, posterior Cramer-Rao lower bounds (CRLBs) on the tracking accuracy using quantized measurement fusion are derived. Simulation results reveal that both approaches perform very closely to the posterior CRLB while obtaining average communication energy saving up to 72.8% and 45.1%, respectively.
1. Introduction
Target tracking through wireless sensor networks (WSNs) is a problem with a large spectrum of applications [1, 2], such as surveillance [3], natural disaster relief [4], traffic monitoring [5], and pursuit evasion games. Although it can have several advantages, target tracking in a WSN is a challenging task since each sensor node typically has very limited power supply and communication bandwidth [6, 7]. Besides, target tracking in this circumstance needs collaborative communication and computation among multiple sensors since information generated by a single sensor node is usually incomplete or inaccurate (e.g., [8]). Collaborative data processing and in-network processing have been extensively studied to reduce redundant communication in target tracking applications. Clustering or group-based techniques such as information-driven sensor query (IDSQ) [9] and dynamic convoy tree-based collaboration (DCTC) [10] are well-known solutions for collaborative target tracking. These schemes explicitly select and manage sensors that participate in target tracking.
Moreover, as mentioned above, each sensor node in the network has very limited energy/power source and communication bandwidth. Thus, by using quantized message for storage or transmission in the place of the original measurement, considerable savings in storage or transmission bandwidth can be realized. The fusion center (FC) will combine the quantized message from local sensors to produce a final estimate of the parameter. The problem of decentralized estimation and tracking based on quantized measurements has been studied in earlier works such as [11, 12]. Recently, a distributed estimation approach based on the sign of innovations (SOI) is developed in [13], where only the transmission of a single bit per observation is required. In [14], particle filtering algorithms for tracking a single target using data from binary sensors are presented with the posterior Cramer-Rao lower bound (CRLB) derived. The posterior CRLBs on the mean squared error (MSE) of target tracking in WSNs with quantized range-only measurements are discussed in [15]. Both constant velocity (CV) and constant acceleration (CA) models for target dynamics and general range-only measuring model for local sensors are included, while the sensor nodes are assumed to be randomly distributed. Very recently, the problem of target tracking in a WSN with quantized measurements using adaptive thresholds is considered in [16]. Attention is focused on the design of measurement quantizer with adaptive thresholds. Based on the probability density function (PDF) of the signal amplitude measured at a random location, an adaptive design method for quantization thresholds is proposed by maximizing the entropy. However, there is little research on collaborative target tracking with nonlinear dynamics and/or observing equation from the quantized measurement fusion perspective.
In this paper, we consider the quantized measurement fusion problem for collaborative target tracking with focus on the energy and bandwidth scheduling strategy. Consequently, a complete framework of quantized measurement fusion for target tracking in a WSN is proposed in this paper. To be more specific, the following problems are considered.
After receiving the quantized measurements from local node, the FC fuses the quantized measurements, for which we consider two fusion approaches. One is the augmented approach, which merges all the noises corrupted quantized messages into a vector. The other is the weighted approach under quasi-best linear unbiased estimation (quasi-BLUE) fusion rule. Note that the latter approach has a lower computational load since the observation vector dimension kept unchanged regardless of the number of the sensors deployed [17]. This is highly desirable in densely deployed WSN since the computational burden will keep low regardless of the number of the sensors activated.
With the focuses on tradeoff between energy/power consumption and fusion accuracy for quantized measurements, we give closed-form solution to the optimization problem for bandwidth scheduling for both approaches. In the optimal bandwidth scheduling problem, the total energy consumption is minimized subject to a constraint on quantization covariance or the overall MSE incurred by weighted fusion.
Due to the fact that generally passive sensors are employed in the sensor networks, we consider the nonlinear Gaussian discrete-time system model. The sequential importance resampling (SIR) particle filtering strategy is used for estimating the target state. The posterior CRLBs (see, e.g., [18, 19] and the references therein) for target tracking using quantized measurements are also derived.
The rest of the paper is organized as follows. In Section 2, the measurement fusion problem using quantized measurements will be formulated, and the quantization strategy is introduced. In Section 3, two quantized measurement fusion approaches are proposed, namely, the augmented approach and the weighted approach. The bandwidth scheduling problems for both approaches are explored, respectively, in Section 4 and Section 5. The tracking algorithm and the performance analysis are provided in Section 6. A numerical example is given in Section 7, which is followed by Section 8 that involves the conclusion and future work.
2. Problem Formulation
Considering the state estimation problem of the following nonlinear discrete-time system in a network with N sensors deployed
where and are the state of the system and the ith measurement at the time step k, respectively; f and are known, possibly nonlinear functions of the state and time step k. is the noise process caused by disturbances and modeling errors; are additive measurement noise vectors of the ith () sensor. It is assumed that the noise vectors and are zero mean and
The initial state with mean and variance is independent of and . To ease the analysis, we also assume that all sensors are synchronised and have the same measurement rate.
Due to bandwidth and energy limitations, each sensor quantizes its measurement into a —bit message (where is the bandwidth to be determined later) and transmits this locally processed data to a FC. Then the FC estimates the state vector of the target according to (1) and the quantized messages. The purpose is to collaboratively estimate the target state using quantized measurements fusion strategy while meeting constraints on total energy consumption. More specifically, we consider the following aspects: (i) how to fuse the quantized messages; (ii) how to optimize bandwidth scheduling among sensors; and (iii) how to estimate the target state using these quantized messages. Before going further, we first describe the quantization scheme used in this paper.
2.1. Probabilistic Quantization Strategy
In the following, we present a brief review of the quantization scheme in this paper. Suppose that the measurement is bounded to a finite interval , where W is a known parameter decided by the sensors' dynamic range. Due to bandwidth and power limitations, each sensor quantizes its observation into a —bit message, where is the bandwidth to be determined later. We, therefore, have quantization points given by the set , where and . The points are uniformly spaced such that for . It follows that . Now suppose and let , where denotes the probabilistic operation. Then is quantized in a probabilistic manner:
where . The following lemma, adopted from [16], discusses two important properties of probabilistic quantization.
Lemma 1.
Suppose interval bounded measurement , and let be a —bit quantization of . The message is an unbiased representation of ; that is,
Assuming that the sensor messages are perfectly received by the FC, then the quantized message at the ith sensor can be modelled as
where is the zero mean quantization error with a variance less than . Moreover, as performed locally at each sensor without coordination, the quantized noises at kth time iteration are mutually independent.
3. Two Quantized Measurement Fusion Approaches
By Lemma 1, the relationship between the original signal of ith sensor and the data received by the FC can be reformulated by
where are mutually independent with zero mean and variance:
By quantized measurement fusion, the N local sensor observation models in (7) can be integrated into the following vector model:
where are zero mean fused noise with variance that will be determined as follows.
Commonly, there exist two approaches to obtain the quantized measurement fusion (see, e.g., [17, 20] and the references therein). One is the augmented approach that merges all the received data into a vector form as follows:
Then by approximately considering the noise to be white noises, we can use nonlinear filtering techniques to get the state vector estimate (see, e.g., [21]).
The other approach first combines the quantized measurements based on the BLUE rule (we will refer to weighted approach thereafter), and then traditional filtering schemes are employed to estimate the state of the target. Specifically, the fusion measurement can be obtained by weighted observation using the quasi-BLUE scheme:
The incurred MSE is thus
Remark 2.
Because the first approach makes use of all the raw quantized messages, it most likely provides a better estimate. However, the latter approach has a lower computational load since the observation vector dimension is kept unchanged regardless of the number of the sensors deployed [17]. This is especially preferable in densely deployed wireless sensor network since the number of sensors deployed in a snapshot will be large, which makes the dimension of observation space high. The cost of calculating inverse matrix, which is involved in computing the gain of the filter, is in proportion to cubic dimension of system observation space; therefore, the computational burden will increase when using the augmented approach as (10).
Remark 3.
It is easy to see that the accuracy of fused quantized measurement is better if the variance of the quantized noise is smaller. We can make its upper bound small, which means that more bandwidths need to be supplied. However, the sensor power and transmission bandwidth are limited in a WSN. In the following, we will consider the bandwidth scheduling problem that solves the tradeoff between energy/power constraints and fusion performance for both quantized measurement fusion approaches.
4. Bandwidth Scheduling for Augmented Approach
In this section, we consider the bandwidth scheduling problem for the quantized measurement fusion via augmented approach. First, a practical energy model is introduced. Then, based on the energy model and the quantization scheme, we set up the optimization problem for bandwidth scheduling. Finally the explicit optimal solution is obtained through the Lagrange technique.
4.1. The Energy Model
We assume that the channel between the ith sensor and the FC experiences a path loss proportional to , where is the transmission distance between the ith sensor and the FC. Then the consumed energy of the ith sensor at time step k is
where is the energy density [22], in which ρ is a constant depending on the noise profile, and is the target bit error rate assumed common to all sensor-to-FC links.
4.2. Optimization Problem Setup
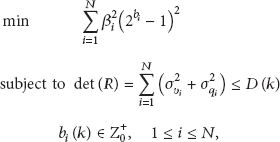
Our primary goal is to minimize the total energy consumption while meeting the constraints on fusion performance. Thus, we consider the following optimization:
where is a given performance constraint. Without illegibility, we will drop out the time step index k thereafter.
Let . Then the optimization problem in (14) can be equivalently rewritten as
The lower limit on is given by the fact that and the definition of . Furthermore, we relax the integer to be a real positive number so as to render the problem tractable and drop the last constraint on as they become inactive at the optimum point. The major advantage of the alternative problem formulation (15) is that it admits the form of convex optimization and leads to a closed-form solution as shown next.
4.3. Optimal Solution
By leveraging the standard Lagrange technique, the optimal solution to (15) can be obtained as follows [23]. Without loss of generality, we first assume that and define
Let be the unique integer such that and . Following a similar way as in [16], it is ready to show that such is unique unless for all , in which case we simply set . Then simple manipulations of (16) lead to the optimal solution given by
Once the optimal real-value is computed, the associated bit loads can be readily obtained through upper integer rounding, as in [16, 22].
Remark 4.
Recall from (12) that the energy consumption of each sensor is proportional to the path loss gain . Hence, large value of the energy consumption corresponds to sensor deployed far away from the FC, usually with poor background channel gain. The most important observation to make from the optimal solution (18) is that the assigned bandwidth is inversely proportional to the logarithm of the energy consumption of this node. This is intuitively reasonable since sensors with better link conditions should be allocated with more bits to improve the estimation fusion accuracy.
5. Bandwidth Scheduling for Weighted Approach
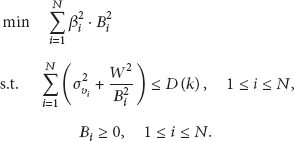
By the same energy model adopted in Section 4, we consider the following optimization problem according to the MSE recurred by BLUE fusion in (11)-(12):
where is a given performance constraint.
5.1. Alternative Formulation
To facilitate the analysis, we also relax the integer to be a real positive number and drop the last constraint on as they become inactive at the optimum point. However, even with this relaxation, the problem (19) remains nonconvex in . Fortunately, we show next that the problem (19) can be reformulated as a convex one by performing a change of variables.
Define . Then, we have
Therefore, the problem (19) can be transformed into a problem with variable shown as follows:
The upper limit on is given by the fact that and . It is easy to check that the optimization problem (21) is convex with respect to the new variable .
5.2. Optimal Solution
By leveraging the standard Lagrange technique, we can derive the optimal solution as follows. Without loss of generality, we assume that and define
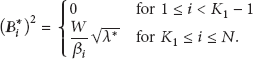
Let be the unique integer such that and ; if , for all , then simply set . Then simple manipulations lead to the optimal solution given by
where equals 0 when and otherwise is equal to x.
Recall the definition of ; we have
Thus, (23) implies that the optimal solution of is
where
Once the optimal real-value is computed, the associated bit loads can be obtained through upper integer rounding. As mentioned above, large value of the energy consumption corresponds to sensor deployed far away from the FC, usually with poor background channel gain. In this point, the optimal solution (25) is similar to (18): for those active nodes, the assigned bandwidth is inversely proportional to the energy consumption of this node. In other words, to improve the fusion estimation accuracy, sensors with better link conditions should be allocated with more bits. Using the dynamic equation (1) and fused measurement (9), the state of the target can be estimated in the FC through nonlinear filtering technique, such as extended Kalman filter, unscented Kalman filter, and particle filter.
6. Particle Filtering and Posterior CRLBs for Tracking with Quantized Measurements
Bayesian sequential estimation, also known as Bayesian filtering, is the most commonly used framework for tracking applications. In Bayesian filtering, the tracking algorithm recursively estimates the target state using the quantized measurement sequence , where , namely, the posterior distribution . It is well known that to recursively calculate the posterior distribution, one needs to have three distributions, namely, the initial state distribution , the state transition model that represents the state dynamics, and the likelihood function that depends on the measurement model [24].
Traditionally, Kalman filter provides an optimal solution to the Bayesian sequential problem for linear/Gaussian systems. In the case of nonlinear systems with Gaussian noises, extended Kalman filter can be used to provide a suboptimal solution by linearization of the nonlinear system equation and/or measurement model locally. Recently, however, it has been shown that even for linear/Gaussian systems, when the sensor measurements are quantized, extended Kalman filtering fails to provide an acceptable performance especially when the number of quantization levels is small [25]. For the problem of tracking with quantized measurements, in addition to the nonlinear mapping from the garget state to the sensor measurements (2), the final measurement fused model at the FC consists of quantized mapping resulting in a highly nonlinear and non-Gaussian system. Therefore, we adopt the sequential importance resampling (SIR) particle filter to solve the target state estimation problem (see, e.g., [24, 26, 27] and the references therein). The advantage of the SIR particle filtering is that it is very easy to implement and computationally more efficient compared to other variants of particle filtering. As can be seen from the simulation in Section 7, the estimated performance by SIR particle filtering is quite satisfactory for tracking with quantized measurements, or in other words it performs very closely to its theoretical bound, namely, the posterior Cramer-Rao lower bound (CRLB) that will be derived in the second part of this section. Note that, for the three distributions mentioned above, the only remaining problem is the likelihood function which depends on both the sensor measurement model and the quantization strategy. With the help of the quantization model (4), the only thing we can infer from the quantized measurement is that the original measurement . That is,
Therefore, for a given time step, we can use the sensor measurement model (9) and the Gaussian noise assumption with the inference in (27) to derive , the probability of a quantized sensor measurement taking a specific value conditioned on the target state
where is a cumulative Gaussian distribution with mean zero and variance 1. Since sensor noises are assumed to be independent, the likelihood function at the FC can be formulated as
Using (29), the SIR particle filtering algorithm can now be applied to estimate the target state.
Now, we are in position to analyze the posterior CRLB for target tracking in WSNs with quantized measurements. Let be an unbiased estimate of the state vector at time instant k, based on the quantized measurement sequence and the prior knowledge of initial density , where , are the augmented quantized measurement. The covariance of the estimation error is bounded by the posterior CRLB:
where is the corresponding Fisher information matrix (FIM) and is the posterior CRLB. Tichavsky et al. provided an elegant method of computing the Fisher information matrix recursively [28]:
where
Here, with ∇ the first-order partial derivative operator. The recursion of (31) starts from an initial FIM , which can be obtained from the a priori PDF
Note that the expectation in (32)–(33) is with respect to and , whereas in (34) it is with respect to , , and . From (31)–(34), it is not difficult to see that the quantized measurements only affect . However, it is noticed that obtaining analytically is not an easy task. A Monte Carlo simulation (see, e.g., [27]) is applied to approximate the theoretical posterior CRLB formulas, as can be found in Section 7.
7. A Simulation Example
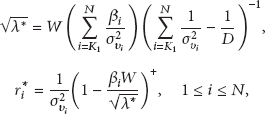
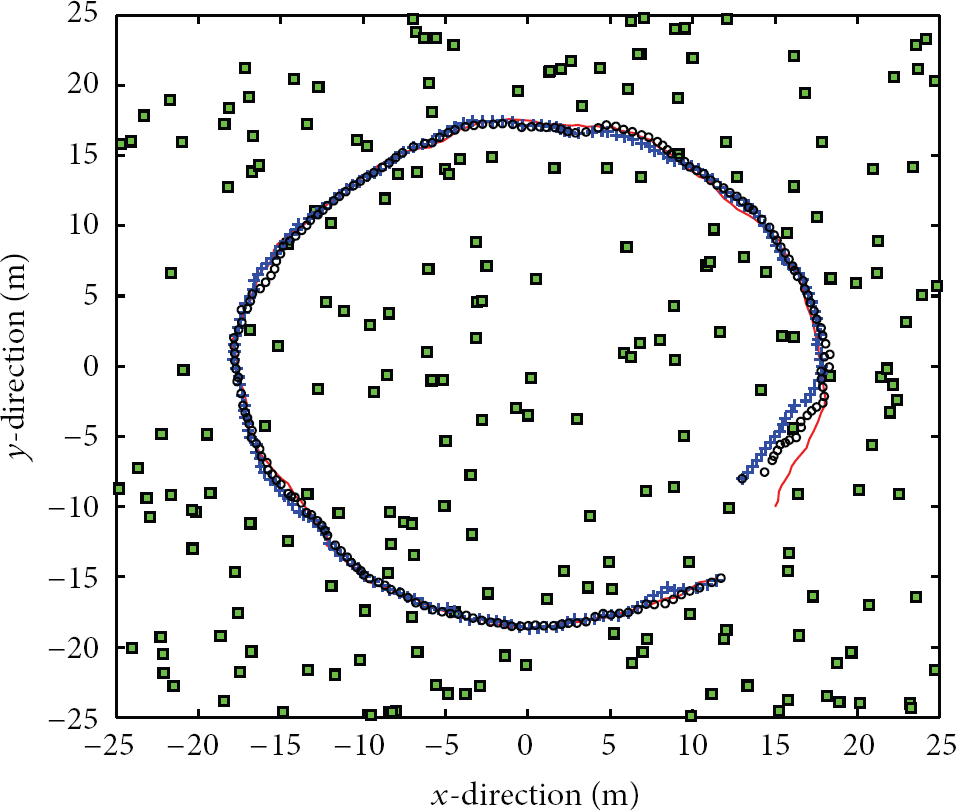
Suppose sensors are randomly deployed in the region of interest, which is 50 m × 50 m with the coordinate from (−25, −25) to (25, 25). Consider a target moving on noise circular trajectories as depicted in Figure 1. We use the CV to model the target dynamics [6, 7] with step-size . The measurement model of the ith sensor is [13]
where is the assumed known amplitude of the sound source (the target), denotes the distance between the target and the ith sensor, and is the measurement noise with distribution . The sensor positions are assumed to be known in the FC.
The target in a randomly distributed sensor field. Each little square stands for the location of a sensor and the solid circle denotes the real or estimated trajectory of the target. Red solid: real; blue with “+”: estimated track through weighted approach; black with “o”: estimated track through augmented approach.
The layout of the network is illustrated in Figure 1, where each little square stands for the location of a sensor. The nearest-neighbors multisensor scheduling scheme is used to perform the tracking task. In each time step, the sensors lying within the sensing radius are selected to form a temporary tasking group. All the member sensors in the group are assumed to perform the sensing task simultaneously. The leader is selected as the one with the minimum average communication distance from all the activated neighbors () and the maximum energy residue (). The selection can be based on , where δ is a weight on the mean distance. In the simulation, we set . Then, each local processor quantizes the measurement to a finite-bit message according to the bandwidth allocation through (18) or (25) and transmits this message to the leader. Finally, the leader, which functions as a local FC in addition to its basic sensing function, estimates the target state according to the received quantized measurements. We assume that the sensor messages are perfectly received by the FC and that all of the sensors deployed into an area have the same characteristics, that is, the same sensing radius m, the measurement noise covariance , and the measuring amplitude range with .
In Figure 1, the red solid curve is the track of the target traveling start from (15, −10), while the black and blue curves represent the estimate of the target state through the proposed augmented and weighted approaches, respectively. The initial distribution of the sound source is assumed to be Gaussian with mean with covariance matrix 5*. In the FC, the augmented and weighted approaches are implemented with optimization problems (14) and (19), respectively. Each activated sensor quantizes the local measurement according to the allocated bandwidth and transmits it to the FC. Then, the SIR particle filtering is used to estimate the state of the target according to (1) and (9). As can be seen from Figure 1, both fusion approaches are able to keep the track very close to the true target trajectory, while the weighted approach performs a little worse than the augmented approach. This is because the latter uses the quantized messages directly without any information while for the former the quantized messages are first weighted, which will bring some information loss.
We perform the simulation over 100 Monte Carlo runs each with 200 time steps. For performance analysis and comparison purpose, we first derive the posterior CRLB in this scenario.
7.1. The Posterior CRLBs in the Linear Dynamic Case
For the CV model and fused measurement model (9), (32)–(34) become
The substitution of (37) into the recursion (31) and the application of the matrix inverse lemma yields
In this case, the recursion starts from , where is the initial state variance.
Remark 5.
When unquantized measurements are used, it is not difficult to derive that [29]
where is the partial derivation of the nonlinear measurement model.
While in our quantized scenario, it is not easy to obtain . The following will show this in detail. Combining the measurement model (36) and the likelihood function at the FC in (29) with the properties of first-order Markov system [30], we are ready to formulate as
where, for , stands for the mth entry of the state vector and
Hence, with the CV system model and measurement model (36), we have, for ,
where , (), and
Till now, we have shown how to calculate the FIM for the state estimation with quantized measurements. However, as mentioned above, obtaining this quantity analytically is not an easy task. Hence, a Monte Carlo simulation (see, e.g., [27]) is applied to approximate the theoretical posterior CRLB formulas. With the help of particle filtering (PF) techniques, each PDF in the expectation can be represented by a set of samples (particles) with associated weights after an M-run Monte Carlo simulation; that is,
where s is the number of particles and and are the lth realization of and during the jth Monte Carlo run, respectively. The posterior CRLB can be obtained by simply taking the inverse of the FIM.
7.2. Results and Discussion
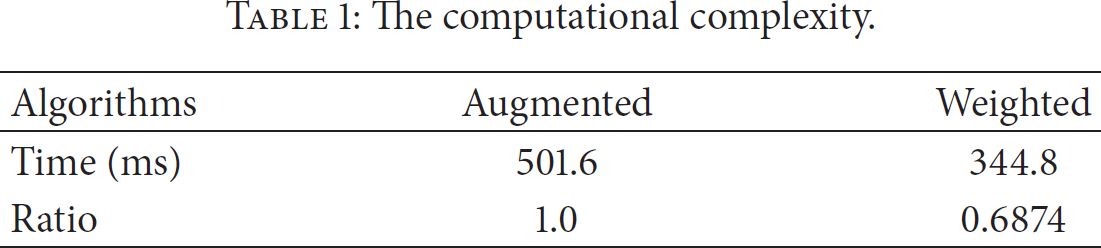
The main performance criterion is the root mean square error (RMSE) of the target position estimates defined by . In Figure 2, the RMSEs of position for both augmented and weighted approaches are compared with the posterior CRLB using quantized measurements. As less tightly bound, the posterior CRLB for state estimation using unquantized measurements is also provided in Figure 2. The performances are based on 100 Monte Carlo runs. From Figure 2, we can see that the augmented approach performs very closely to the posterior CRLB using quantized measurements. It is clear that the augmented approach significantly outperforms the weighted approach since the raw quantized messages are used for the former. Besides, the difference between the augmented and weighted approaches lies in that the latter merges the quantized measurements into a large vector, which will bring large computational burden in the FC. This will be demonstrated immediately (cf. Table 1). The RMSE iny-direction performs similarly and, therefore, is omitted here.
The computational complexity.
Algorithms
Augmented
Weighted
Time (ms)
501.6
344.8
Ratio
1.0
0.6874
RMSEs of the two fusion approaches using SIR particle filtering. Solid black with “o”: weighted approach; dashed blue with “□”: augmented approach; solid red: posterior CRLB using quantized measurements; solid black with “×”: posterior CRLB using unquantized measurements.
Tracking accuracy does not denote everything. It is especially true for target tracking through WSNs because the energy and bandwidth are both strictly limited. Therefore, another purpose of our simulations is to observe how the percentage of activated sensors affects the tracking accuracy and the amount of energy saving. We varied the percentage of activated sensors lying in the sensing radius from 10% to 100%. For each scenario, sensors are activated, where P is the percentage, is the number of sensors lying within the sensing radius, and is the operator of upper integer rounding. Furthermore, we define the mean of RMSE over sampling time as . The mean RMSEs for both augmented and weighted approaches are shown in Figure 3. For comparison purpose, we also plotted the posterior CRLB with quantized measurements. Commonly, the mean RMSEs and CRLB decrease as the percentage of activated sensors increases. Furthermore, for all scenarios, the augmented approach also performs very closely to the CRLB and significantly outperforms the weighted approach.
Mean RMSEs decrease as the percentage of activated sensors that lie in the sensing radius increases. Solid black + diamond: weighted approach; solid blue + ×: augmented approach; solid red + o: posterior CRLB.
Moreover, we compare the proposed power scheduling schemes (18) and (25) to the uniform quantization allocation scheme, in which each sensor quantizes the observation into the minimal same number of bits to achieve the target RMSE distortion [16]. The comparison of communication energy between the proposed scheduling strategies in (18) and (25) and the uniform quantization allocation scheme is shown in Figure 4, in which we also vary the percentage of activated sensors that lie in the sensing radius from 10% to 100%. The mean of communication energy reduction for (18) and (25) is 45.1% and 72.8% when the percentage of activated sensors is 100%, respectively. This will prolong the lifetime of the whole network abundantly for both fusion approaches. Besides, from Figure 4, it is obvious that the energy saving of (18) and (25) over uniform quantization allocation scheme increases with the percentage of sensors increase. In other words, the proposed bandwidth scheduling schemes save more energy in densely deployed sensor networks. Finally, computational complexity of the two approaches in the FC is compared in Table 1, which shows that the weighted approach has less computational burden than the augmented approach. Compared with the latter, the former saves more than 31% computational energy in the FC.
Energy saving increases as the percentage of activated sensors that lie in the sensing radius increases. Solid red + o: weighted approach; solid blue + triangle: augmented approach.
8. Conclusion and Future Work
The energy-constrained bandwidth scheduling problem for collaborative target tracking in WSNs has been investigated from the quantized measurement fusion perspective. Quantized measurement fusion via both augmented approach and weighted approach has been investigated with the focus on tradeoff between total energy consumption and fusion performance. The closed-form solution to the quantized-measurement-fusion-based bandwidth scheduling has been given for both approaches. Posterior CRLB on the tracking accuracy using quantized measurements is also derived. Future work will be concentrated on the tracking algorithm and the performance analysis under transmitting uncertainties.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The work was supported by the National Natural Science Foundation of China (61104210, 61100140, 61372049, and 61104072), China Scholarship Council (CSC), and the construct program of the key discipline in Hunan Province.
References
1.
AkyildizI. F.SuW.SankarasubramaniamY.CayirciE.Wireless sensor networks: a surveyComputer Networks20023843934222-s2.0-003708689010.1016/S1389-1286(01)00302-4
ValeraM.VelastinS. A.Intelligent distributed surveillance systems: a reviewIEE Proceedings—Vision, Image and Signal Processing2005152219220410.1049/ip-vis:20041147
4.
WangQ.ChenW.-P.ZhengR.LeeK.ShaL.Acoustic target tracking using tiny wireless sensor devicesProceedings of the International Workshop on Information Processing in Sensor Networks20032634642657Lecture Notes in Computer Science2-s2.0-35248861581
5.
LiX.ShuW.LiM.HuangH.-Y.LuoP.-E.WuM.-Y.Performance evaluation of vehicle-based mobile sensor networks for traffic monitoringIEEE Transactions on Vehicular Technology2009584164716532-s2.0-6614915272110.1109/TVT.2008.2005775
6.
XiaoJ.-J.CuiS.LuoZ.-Q.GoldsmithA. J.Power scheduling of universal decentralized estimation in sensor networksIEEE Transactions on Signal Processing20065424134222-s2.0-3134445570410.1109/TSP.2005.861898
7.
ZhouY.LiJ.WangD.Collaborative target tracking in wireless sensor networks using quantized innovations and sigma-point Kalman filteringProceedings of the IEEE International Symposium on Industrial Electronics (ISIE '09)July 2009Seoul, Korea9429472-s2.0-7795017621110.1109/ISIE.2009.5222156
8.
AslamJ.ButlerZ.ConstantinF.CrespiV.CybenkoG.RusD.Tracking a moving object with a binary sensor networkProceedings of the 1st International Conference on Embedded Networked Sensor Systems (SenSys '03)November 20031501612-s2.0-18844392239
9.
ZhaoF.ShinJ.ReichJ.Information-driven dynamic sensor collaborationIEEE Signal Processing Magazine200219261722-s2.0-003650316510.1109/79.985685
10.
ZhangW.CaoG.DCTC: dynamic convoy tree-based collaboration for target tracking in sensor networksIEEE Transactions on Wireless Communications200435168917012-s2.0-754423579710.1109/TWC.2004.833443
11.
GubnerJ. A.Distributed estimation and quantizationIEEE Transactions on Information Theory1993394146514672-s2.0-0027632040
12.
LamW.-M.ReibmanA. R.Design of quantizers for decentralized estimation systemsIEEE Transactions on Communications19934111160216052-s2.0-002769786310.1109/26.241739
13.
RibeiroA.GiannakisG. B.RoumeliotisS. I.SOI-KF: distributed Kalman filtering with low-cost communications using the sign of innovationsIEEE Transactions on Signal Processing20065412478247952-s2.0-3394711130210.1109/TSP.2006.882059
14.
DjuricP. M.VemulaM.BugalloM. F.Target tracking by particle filtering in binary sensor networksIEEE Transactions on Signal Processing2008566222922382-s2.0-4494922338710.1109/TSP.2007.916140
15.
ZhouY.LiJ.WangD.Posterior Cramér-Rao lower bounds for target tracking in sensor networks with quantized range-only measurementsIEEE Signal Processing Letters20101721571602-s2.0-7995571222810.1109/LSP.2009.2035672
16.
ZhouY.LiJ.WangD.Target tracking in wireless sensor networks using adaptive measurement quantizationScience China Information Sciences20125548278382-s2.0-8485825487310.1007/s11432-011-4327-3
17.
GanQ.HarrisC. J.Comparison of two measurement fusion methods for Kalman-filter-based multisensor data fusionIEEE Transactions on Aerospace and Electronic Systems2001371273280
18.
Van TreesH. L.BellK. L.Bayesian Bounds for Parameter Estimation and Nonlinear Filtering & Tracking2007Wiley-IEEE Press
19.
MengH.HernandezM. L.LiuY.WangX.Computationally efficient PCRLB for tracking in cluttered environments: measurement existence conditioning approachIET Signal Processing2009321331492-s2.0-6044910920910.1049/iet-spr:20080040
20.
LiX. R.ZhuY.HanC.Unified optimal linear estimation fusionProceedings of the 39th IEEE Conference on Decision and Control2000Sydney, Australia1025
21.
SunS.LinJ.XieL.XiaoW.Quantized Kalman filteringProceedings of the 22nd IEEE International Symposium on Intelligent Control (ISIC '07)October 2007Singapore7122-s2.0-4114914605510.1109/ISIC.2007.4450852
22.
CuiS.GoldsmithA. J.BahaiA.Energy-constrained modulation optimizationIEEE Transactions on Wireless Communications200545234923602-s2.0-2684448533010.1109/TWC.2005.853882
23.
BoydS.VandenbergheL.Convex Optimization2003Cambridge, UKCambridge University Press
24.
ArulampalamM. S.MaskellS.GordonN.ClappT.A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian trackingIEEE Transactions on Signal Processing20025021741882-s2.0-003647544710.1109/78.978374
25.
RuanY.WillettP.MarrsA.PalmierF.MaranoS.Practical fusion of quantized measurements via particle filteringIEEE Transactions on Aerospace and Electronic Systems200844115292-s2.0-4464914834210.1109/TAES.2008.4516986
26.
GordonN. J.SalmondD. J.SmithA. F. M.Novel approach to nonlinear/non-Gaussian Bayesian state estimationIEE Proceedings, Part F199314021071132-s2.0-0027580559
27.
RisticB.ArulampalamS.GordonN.Beyond the Kalman Filtering: Particle Filtering for Tracking Application2004Artech House
28.
TichavskyP.MuravchikC. H.NehoraiA.Posterior cramér-rao bounds for discrete-time nonlinear filteringIEEE Transactions on Signal Processing1998465138613962-s2.0-003207105410.1109/78.668800
29.
Van TreesH. L.Detection, Estimation and Modulation Theory1968New York, NY, USAJohn Wiley & Sons
30.
Bar-ShalomY.LiX. R.KirubarajanT.Estimation with Applications to Tracking and Navigation2001New York, NY, USAJohn Wiley & Sons