
Abstract
Since improvement of wireless communication, IP based mobility management protocols have been studied to provide seamless communication and mobility management. The vehicular ad hoc network (VANET) is one of mobility management protocols, especially providing seamless connection with inter/intra/inner vehicle communication. However, each vehicle moves fast that causes short-lived connections with Access Router (AR). Based on vehicles' characteristic, it is hard to provide the availability of IP services in VANET. The most critical issue of the design of scalable routing algorithm is to provide robustness of frequent path disruption caused by vehicles' mobility. In this paper, we pursue the characteristics of vehicles' mobility and analyze them. With the navigation information which is one of vehicles' mobility characteristics, we classify the mobility into intrahighway mobility and global mobility management. Furthermore, we propose mobility management scheme based on route prediction in VANET. Handoffs with intrahighway mobility are managed locally and transparency is provided to CHs, while global mobility is managed with Mobile IPv6. Finally, through the numerical analysis, we show that proposed mobility management protocol reduces handoff latency, signaling costs, and packet loss.
1. Introduction
Nowadays, by improved wireless communication technique, wireless node and sensor are rapidly increased. Variable types of mobile devices which are provided with wireless interface can access Internet anytime and anywhere. IETF proposed IP based mobility management protocols to provide seamless communication and mobility management [1–3]. Depending on each device and environment, several types of mobility are presented (personal mobility, network mobility, sensor mobility, vehicles' mobility, and so on).
The start point of mobility management is the personal mobility. The IETF designed Mobile IPv6 (MIPv6) between wireless IPv6 networks. In MIPv6, mobile nodes are possible to access wireless IPv6 networks without changing their IP address. However, if mobile host (MH) moves frequently, MIPv6 results in high handoff latency and high signaling costs to update the MH's location [1]. Therefore, many mobility management protocols have been proposed to improve handoff performance and reduce signaling overhead. And, the other problem is that if several MHs move to identical route continuously as a group, MIPv6 results in same handoff latency and same signaling costs for each MH. To solve this problem, the IETF NEMO working group proposed network mobility basic support protocol [2] extending MIPv6. Network mobility (NEMO) is designed to support the movement of a mobile network consisting of several mobile nodes where nodes move together as a group, as in a train, car, plane, ship, and so forth. To manage mobility of sensors, ZigBee [3] is proposed that is non-IP layer protocol and TCP/IP is not used. However, sensor networks consisting of too many nodes can be connected to other devices via the wireless communication network. Therefore, an efficient addressing mechanism is needed to communicate with each sensor and wireless node in the network. The IETF IPv6 over low power WPAN (6LoWPAN) working group [4] was organized to define the IPv6 transmission packets over IEEE 802.15.4 [5]. In 6LoWPAN, each node is assigned a global IPv6 address. So, external IPv6 hosts are able to communicate with sensor nodes in 6LoWPAN [6]. And, the vehicles' mobility management is studied on network environment that is called vehicular ad hoc network (VANET) to provide seamless communication and mobility management within vehicle [7]. In VANET, the mobility can be classified into intervehicle between device of vehicle and other IP network, intravehicle between vehicles, and inner vehicle between vehicle devices.
However, the main problem of intervehicle mobility is short-lived connection to Access Router (AR), that causes additional signaling messages and too much packet loss. So, the most critical issue of the design of scalable routing algorithm is to provide robustness of frequent path disruption caused by vehicles' mobility [8, 9]. Typically, vehicle mobility has several characteristics. We will discuss them at Section 3.
In this paper, we classify the mobility into intrahighway mobility and global mobility management mobility with the navigation information that is one of vehicles' mobility characteristics. Furthermore, we propose mobility management scheme based on route prediction in VANET. Handoffs with intrahighway mobility are managed locally and transparency is provided to CHs, while global mobility is managed with Mobile IPv6. Through the numerical analysis, we show that proposed mobility management protocol reduces handoff latency, signaling costs, and packet loss.
This paper is organized as follows. In Section 2, the related mobile management protocols are introduced. Section 3 explains the environment that we are focusing on. In Section 4 we describe the operation of proposed protocol. Section 5 shows numerical analysis between basic NEMO protocol and proposed protocol. Finally, Section 6 concludes this paper.
2. Related Works
2.1. Mobility Management Schemes
To provide seamless communication for mobile devices, IP based mobility management schemes are proposed [1–5]. Typically, MIP protocol is specified IP routing in mobile environment by the IETF. When an MH changes its point of attachment, it gets new care-of-address (CoA). Then, it announces its binding update (BU) at its home agent (HA) and corresponding hosts (CHs). The HA has its binding cache that BU is mapped between MH's home address (HoA) and MH's CoA. If any packets head to MH, HA intercepts and tunnels them to MH's CoA using IP-in-IP encapsulation. BU is received at CH; then, CH sends packet directly to MH's CoA without triangle routing. However, MIP suffers from several well-known weaknesses such as handoff latency or signaling overhead that have led to macro/micromobility schemes. Thus, [10–15] have been proposed to improve handoff performance and reduce signaling overhead.
2.2. Network Mobility
The NEMO protocol maintains the session continuity for all the groups of MHs [2, 16], even when the mobile network (MN), that consists of MHs, dynamically changes its point of attachment to the Internet. It also manages connectivity for all MHs as it moves. The NEMO protocol has been standardized in RFC 3963 [16] to support network mobility. NEMO is based on IPv6, so all signaling messages such as binding update (BU) and binding acknowledgement (BA) are extended Mobile IPv6 messages. The BU and BA messages have an additional flag R bit to signal the mobile router (MR). In NEMO, explicit and implicit mode are proposed. In the explicit mode, several mobile network prefix options (at least one) should be included in a BU message. In the implicit mode, instead of including mobile network prefix, the HA decides mobile network prefix owned by the MR.
When the MR moves to a new link, the MR sends the BU to its HA with a new CoA, which is the IPv6 address of the MR at its current Internet attachment point. The BU message also includes the mobile network prefix option and an R flag. HA updates the MR's routing table and replies a BA. If the packet is sent to an MH from a CN, the HA intercepts the packet and encapsulates its current CoA in bidirectional tunnel to the MR. Then, the MR decapsulates the packet and forwards to the MH.
2.3. Vehicular Ad Hoc Network
Vehicular communication networks are envisioned for the access to drive through Internet and IP based applications. These services are supported by roadside ARs that connected vehicular ad hoc network (VANET) to external IP networks [7]. However, the VANET suffers from asymmetric links due to variable transmission ranges caused by mobility, obstacles, and dissimilar transmission power, which make it difficult to maintain the bidirectional communications and to provide the random mobility required by most mobile IP devices. Moreover, the mobility of vehicle results in short-lived connections to the ARs, affecting the availability of IP services in VANETs. And, more challenge issues are emerging for seamless communications through multihop VANETs, because of proposing the infrastructure to vehicle to vehicle (I2V2V) communications for infotainment applications, such as IP based services and drive through Internet access [8, 9].
First, due to the dynamic network topology of VANET, vehicles transfer their active connection through different IP networks. Thus, the on-going IP sessions are affected by the change of IP addresses, which causes the session disconnections. Second, additional complexity may be added due to links variability during V2V communications and the presence of asymmetric links caused by irregular transmission ranges between network infrastructure and VANET devices [8, 9].
3. Characteristics of Highway Environment
Nowadays, we can easily find using wireless devices in the moving vehicle. Generally, the seamless communication should be provided to most devices in vehicles. However, the MH and MR in the vehicle could be hard to guarantee seamless communication, when the vehicle moves. And, they are moved into highway, or their speed is over 100 km/h, the seamless communication cannot be guaranteed. To guarantee seamless communication for mobile device in a vehicle, we must consider vehicle movement features. The one is that the vehicle has its own mobility. The other one is the vehicle moves on route that is structured geographically.
3.1. Characteristics of Vehicles' Mobility
The mobility of vehicle has several characteristics.
Heterogeneous network is available (i.e., GPS, WLAN, WIBRO, LTE/3g, Bluetooth, etc.). A vehicle has the random mobility. In the vehicle, several mobile devices have the group mobility. A vehicle has the group mobility with other vehicles that move in same way. A vehicle must move on route that is structured geographically. The vehicle's movement pattern can be predicted by the navigation. On highway, the random mobility disappeared.
If some of characteristics are satisfied, the mobility of vehicle is determined by the group mobility. Also, the vehicle's movement path can be predicted. Thus, this paper is based on two assumptions that are given as follows.
Assumption 1.
The navigation must be used, and the vehicle's own path is set before departure.
Assumption 1 can be easily solved by users. And, the navigation has more than one wireless interface. For example, default wireless interface is GPS for location information, velocity information, and geographic information, and optional wireless interface is WLAN for system's data transfer. If the user inputs his/her destination information, the predicted route path is extracted. In this paper, the vehicle's predicted route path information is provided by Assumption 1.
Assumption 2.
The network structure of highway or expressway is virtualized as a single subnet or multiple subnets.
Generally, the structure of highway is consistent with road and loop (entrance and exit). The vehicle must enter and exit through the highway loop. So the logical structure of highway can be several roads that are divided by loop. Typically, the logical network structure of highway can be constructed with multiple subnets that covers each road and single domain that covers the highway. Actually, the logical network structure of highway can be constructed with multiple subnets that covers all highway. However, constructing the network structure of highway is not the responsibility of researcher. In reality, it is the responsible of the highway management agency or other local organizations. In this paper, the network structure of highway is provided by Assumption 2.
3.2. Characteristics of Highway Mobility
The highway environment is fixed route that is consistent with partial route and it is geographically connected. As we discuss in Section 3.1, the logical network structure of highway can be constructed with multiple subnets as a single domain. Existing mobility management schemes [10–15] have been researched for intradomain network. They are proposed to improve handoff performance and to reduce signaling overhead for MH within a single domain. In vehicular environment, because of vehicle's mobility, they could not be adopted without any modifications.
In this paper, we construct highway organization that consists of subnets. We organize geographically distributed subnets into a logical highway organization. Therefore, MH/MR that moves within highway is in physical subnet i, but it is logically in highway organization. In Figure 1, there is an example of highway organization that consists of 5 domains.

Example of highway organization.
In this paper, we separate highway mobility from global mobility management by highway organization. The highway mobility does not require binding update signaling to HA. It is managed by highway home AR and minimizes handoff delay on highway environment. Global mobility requires binding update signaling to HA as MIPv6.
3.3. Design of Highway Structure
We define a highway organization that consists of subnets. We organize geographically distributed subnets into a logical highway organization. We propose highway home AR that manages MHs/MRs within the highway organization. Figure 2 shows the example and schematic representation of highway organization.

Schematic representation of highway organization.
4. Proposed Highway Mobility Management
4.1. Protocol Overview
In this paper, we separate highway mobility from global mobility management. The highway organization consists of subnets in highway. And the highway organization is connected to the rest of Internet via one or multiple highway home ARs. And the MHs/MRs in the highway organization are managed by the highway home AR.
The proposed highway mobility management scheme consisted of four phases as follows: route_prediction phase, pre_registration phase, registration phase, and packet delivery phase.
4.2. Route_Prediction Phase
Algorithm 1 shows the route prediction algorithm. This algorithm is initiated by MHs/MRs. When the navigation finds out new route path, the route prediction algorithm is started. The route_path i consisted of partial_path 1 to partial_path n . Each partial_path i is verified in which there is highway by bool_operator. The bool_operator checks distance and velocity of each route_path i . And then, if there is one or more partial_path i that includes the highway, send pre_registration to highway home AP.
Initialization status;
Get route_path form the navigation;
Send current host id of MH/MR to highway home AR;
bool_operator()
{
return false;
}
4.3. Pre_Registration Phase
Algorithm 2 shows the pre_registration algorithm. This algorithm is initiated by highway home AR. The pre_registration phase starts with request of pre_registration (). This phase performs the duplicate address detection. If received MH/MR's host id is duplicated, new host id is selected from pool of idle IP. And set it up as a reserved host IP. Then, the reserved host IP is broadcasted to all ARs in highway organization.
Send prefix of highway home access router address to MH/MR;
Send reserved host id;
Broadcast reserved host id to all ARs in highway organization
IP configuration()
{
}
4.4. Registration Phase
Figure 3 shows the call-flow of registration. This call-flow consisted of pre_registration phase and after handoff phase. After handoff, the MH/MR does not have to assign its new CoA from new AR. Also, the MH/MR sends only once BU to its home agent when it enters into highway organization.

Call-flow of registration.
4.5. Packet Delivery
Figure 4 shows the call-flow of packet delivery. This call-flow consisted of the default packet forwarding phase and the highway packet forwarding phase to which the MH/MR is attached in highway organization.
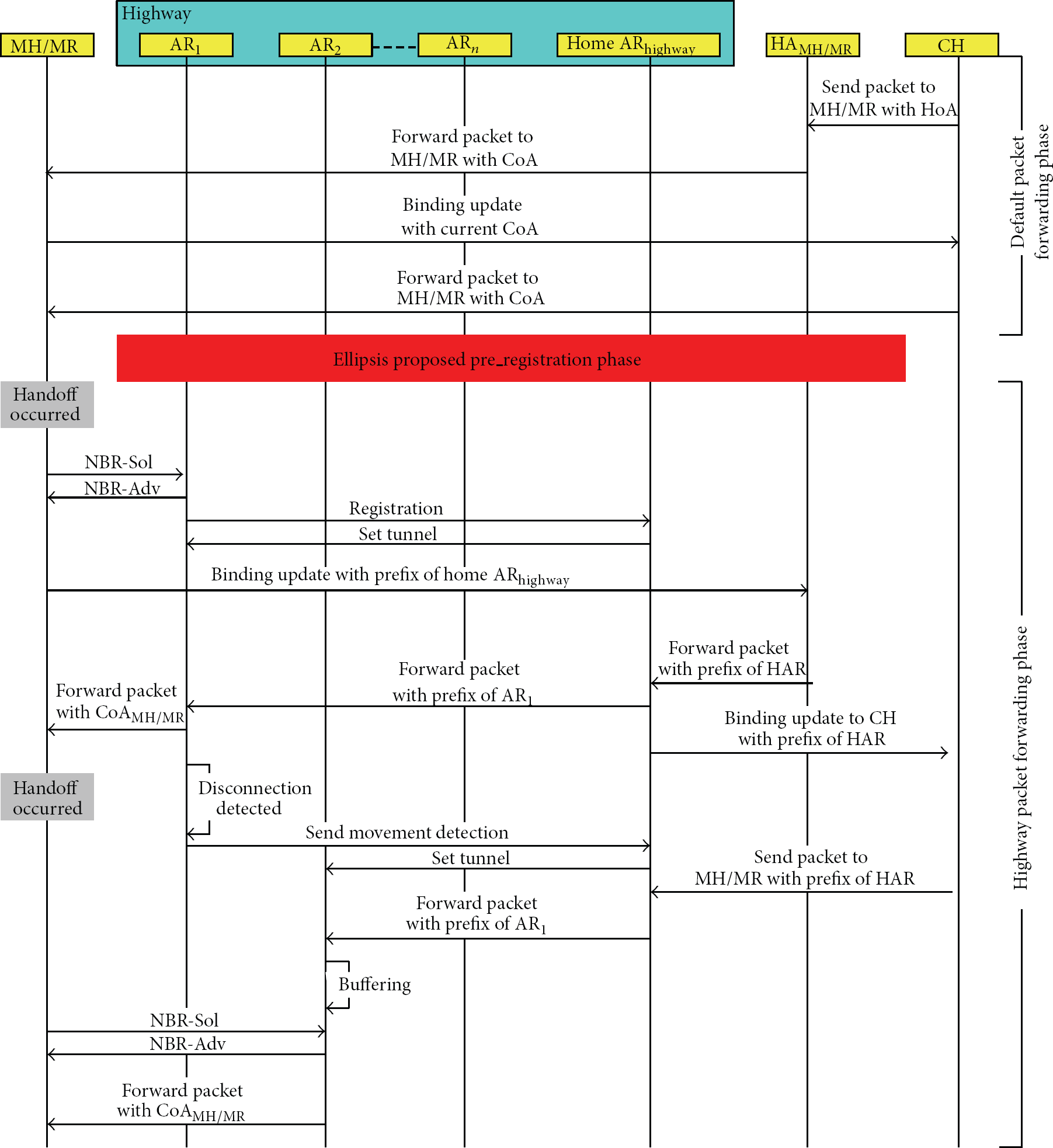
Call-flow of packet delivery.
5. Numerical Analysis
5.1. Signaling Cost and Packet Delivery Cost
We analysis the performance of proposed scheme with respect to the following metrics: location update signaling cost N: the number of network service areas (or AR), μ: the rate of service-area crossing: v: the average velocity of MH/MR (vehicle), π: the direction of MH/MR (vehicle), L: the average length of sessions,




The location update signaling cost per handoff BU is obtained according to the number of hops the signaling messages have to reach the home agent in default case such as NEMO and the highway home AR in highway organization case that is proposed. It is calculated as follows:

The total location update signaling cost

The delivery overhead cost per packet PD accounts for extrainformation and extralinks traversed when delivering a data packet from a server to the vehicle. It is computed as follows:

The total packet delivery cost

Total cost CT is obtained by adding the total location update and total packet delivery cost of each scheme. Therefore,

5.2. Numerical Analysis
In this section, we demonstrate some numerical results. Table 1 shows parameters used in our performance analysis [17, 20]. For simplicity, we assume that the distance between mobility agents is fixed and is same.
Numerical analysis parameter.

Figure 5 shows that proposed scheme achieves lower BU cost compared with basic NEMO. When ρ becomes larger, a different result is observed. The result of Figure 5 is compared longer session lengths with mobility, where different session lengths
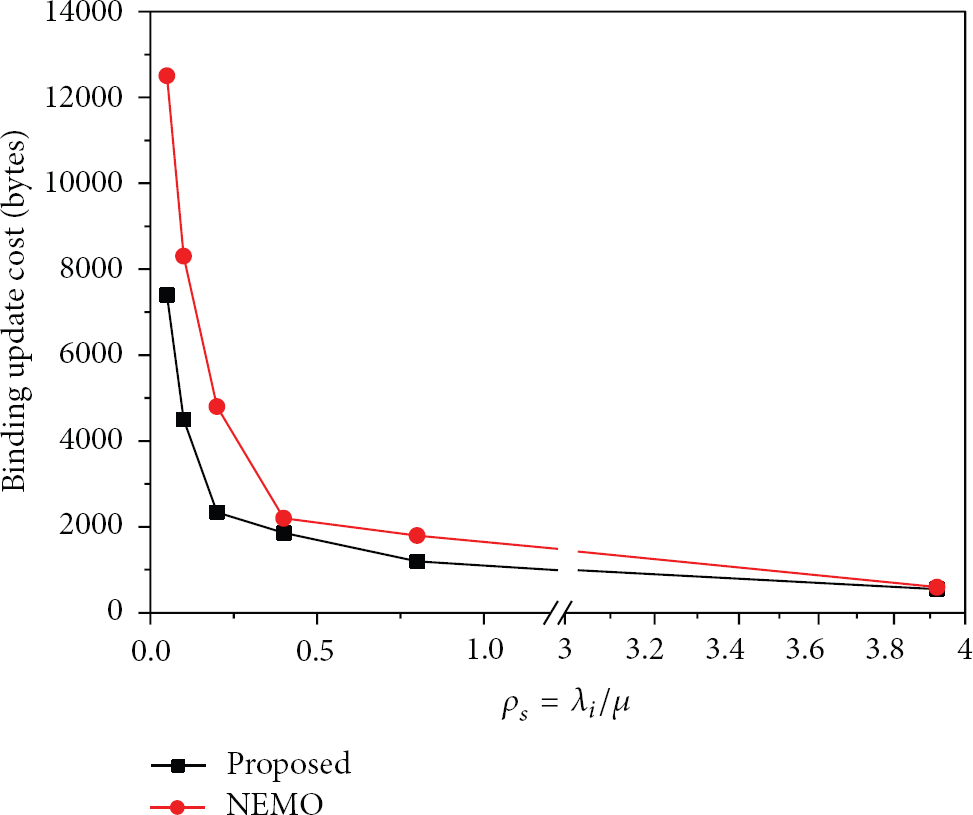
Signaling overhead comparison.
Different downloading data rates (

Packet delivery comparison.
Figure 7 shows the handoff signaling delay of the proposed protocol. The handoff signaling delay increases linearly with the number of hops. The NEMO does not need to perform the DAD procedure. Also, the size of signaling messages such as BU and BA messages can be reduced by using the pre_registration algorithm.

Handoff signaling delay with number of hops.
Figure 8 shows the total packet loss of each method in 20 min. In our simulation scenario the MH moves within highway between 6 min and 15 min. The proposed discovery process (55,932 kb) outperformed the NEMO process (132,053 kb), showing a 42.3% improvement.

Packet loss in 20 min.
6. Conclusion
In daily life, we can easily see people who are using mobile devices in vehicles. By vehicles movement speed, mobile devices frequently change their point of attachment. So, it is hard to provide seamless connection for mobile devices in vehicles. In this paper, we focus on network mobility management to provide reliable communication within the vehicle that moves in fast moving area such as highway. The most critical issue of the design of scalable routing algorithm is to provide robustness of frequent path disruption caused by vehicles' mobility. For that reason, we pursue the characteristics of vehicles' mobility and analyze them. In this paper, we classified mobility into intrahighway mobility and global mobility management with route prediction by navigation information. Furthermore, we propose efficient mobility management scheme based on route prediction in VANET. Proposed mobility management scheme has several advantages. First, proposed mobility management scheme reduces handoff latency, since handoffs within the highway are managed locally such as handoffs within a single domain. This causes additional advantages increasing handoff speed and minimizes packet loss during transition. Second, proposed mobility management scheme reduces the signaling overhead by BU that each MH/MR initiates and provides transparency to CHs. In this paper, the BU within the highway, the home AP of highway sends the BUs to each MH/MR's HA and their CH. It means proposed mobility management scheme provides transparency to CHs, so the MH/MR does not have to send the BU within the highway. On point of HA/CH, MH/MR stays in the highway. Through the numerical analysis based on the discrete analytic model shows that proposed scheme has superior performance to the basic NEMO scheme within the highway.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This research was supported by Seokyeong University in 2012.