
Abstract
In order to improve the effectiveness for identifying rolling bearing faults at an early stage, the present paper proposed a method that combined the so-called complementary ensemble empirical mode decomposition (CEEMD) method with a correlation theory for fault diagnosis of rolling element bearing. The cross-correlation coefficient between the original signal and each intrinsic mode function (IMF) was calculated in order to reduce noise and select an effective IMF. Using the present method, a rolling bearing fault experiment with vibration signals measured by acceleration sensors was carried out, and bearing inner race and outer race defect at a varying rotating speed with different degrees of defect were analyzed. And the proposed method was compared with several algorithms of empirical mode decomposition (EMD) to verify its effectiveness. Experimental results showed that the proposed method was available for detecting the bearing faults and able to detect the fault at an early stage. It has higher computational efficiency and is capable of overcoming modal mixing and aliasing. Therefore, the proposed method is more suitable for rolling bearing diagnosis.
1. Introduction
Rolling bearing is one of the most important components in rotating machines, whose running state directly affects the performance of the whole machine. Identification and diagnosis of rolling bearing's fault can ensure that a machine operates safely and prolong its service life. Therefore, it is of essential significance to monitor the condition of rolling bearing and finding fault in time.
Fault diagnosis of rolling bearings is mainly based on vibration theory, using acceleration sensors to measure the vibration signal. Various methods can be used to process the signal, such as demodulated resonance method, wavelet analysis, cepstrum analysis, estimation of characteristic parameter [1]. However, a rolling bearing's fault signal is usually nonlinear and nonstationary with strong noise interference, which makes it difficult to do fault diagnosis. At present, researches on fault diagnosis of rolling bearing mainly consist of two aspects, that is, fault feature extraction methods and intelligent diagnosis methods. Feature extraction methods include time-domain analysis method (correlation method, time-domain average, etc.), frequency domain analysis method (Fourier transform, power spectrum analysis, etc.), and statistical analysis method (higher order spectral analysis, principal component analysis, etc.). Intelligent diagnosis methods include neural networks, ant colony algorithm, particle swarm optimization, and support vector machine. For example, Shuang and Meng [2] introduced principal components analysis (PCA) method and support vector machine (SVM) method as a new approach to recognize the fault types of rolling bearing. Experiments showed that the proposed method is available in recognizing fault types. Randall and Sawalhi [3] combined minimum entropy deconvolution (MED) with envelope spectrum analysis in order to extract fault characteristic of rolling bearing.
As a powerful tool for analyzing nonstationary signals, time-frequency analysis is a hotspot in the research of signal processing. Time-frequency analysis methods include Wigner-Ville distribution, continuous wavelet transform, and Hilbert-Huang transform [4–6], which provide the joint distribution information of time-domain and frequency domain and describe the relationship between signal frequency and time variation. Time-frequency analysis is using joint distribution function to describe energy density or energy intensity of different time and frequency that can get the instantaneous frequency and amplitude of each moment.
EMD proposed by Huang et al. in 1998 [7] is a practical method of time-frequency analysis. It is an adaptive signal processing method designed for multiscale decomposition and time-frequency analysis of signals. Under the characteristic time scales, complex signal can be modeled as a linear combination of intrinsic oscillatory modes called intrinsic mode functions (IMFs). More specifically, for a complex signal, EMD method finds a set of IMFs and a monotonic residue signal. The IMFs are zero-mean amplitude-frequency modulated signals, while residual is a monotonic function. As it is, EMD algorithm has been used to identify the fault types of rolling bearing widely. However, there is a serious drawback in EMD, such as mode mixing and aliasing. To deal with the shortcomings, Wu and Huang additionally proposed ensemble empirical mode decomposition (EEMD) method, which essentially resolved mode mixing and aliasing problems associated with EMD through the help of added noises [8]. Through ensemble averaging the effects of added white Gaussian noise, EEMD benefits from enhanced local mean estimation in noisy data to yield IMFs that are less prone to mode mixing [9]. This made EEMD perform better than EMD, but the complicated algorithm reduces computational efficiency. Due to the situation that both EMD and EEMD are suitable for univariate signal, Rehman and Mandic proposed an extensional method called multivariate empirical mode decomposition (MEMD) to cater for multichannel signals. The critical step of envelop interpolation is performed by taking projection of the multivariate signal along multiple directions on an n sphere. Through the analysis and verification, the use of low discrepancy point set gives uniformly distributed direction vectors on an n sphere and makes MEMD accurate and efficient [10]. Compared with EMD, MEMD acts as a dyadic filter bank on each channel and better aligns the corresponding IMFs from different channels across the same frequency range. However, mode mixing problem that existed in MEMD is inevitable. To resolve this problem, Rehman and Mandic [11] proposed noise-assisted MEMD (NA-MEMD) method. By introducing extra channels of multivariate noise, the effects of mode mixing and mode aliasing in multivariate IMFs have been reduced. And the real world electroencephalography signals were applied to support the analysis. Unlike EEMD, NA-MEMD did not increase much computing time. For EEMD, lots of white noise is directly added to the signal and then multiple instances of EMD are needed to run to reduce the effect of added noise. On the other hand, NA-MEMD allows adding white noise in extra channels where a signal application of MEMD is enough.
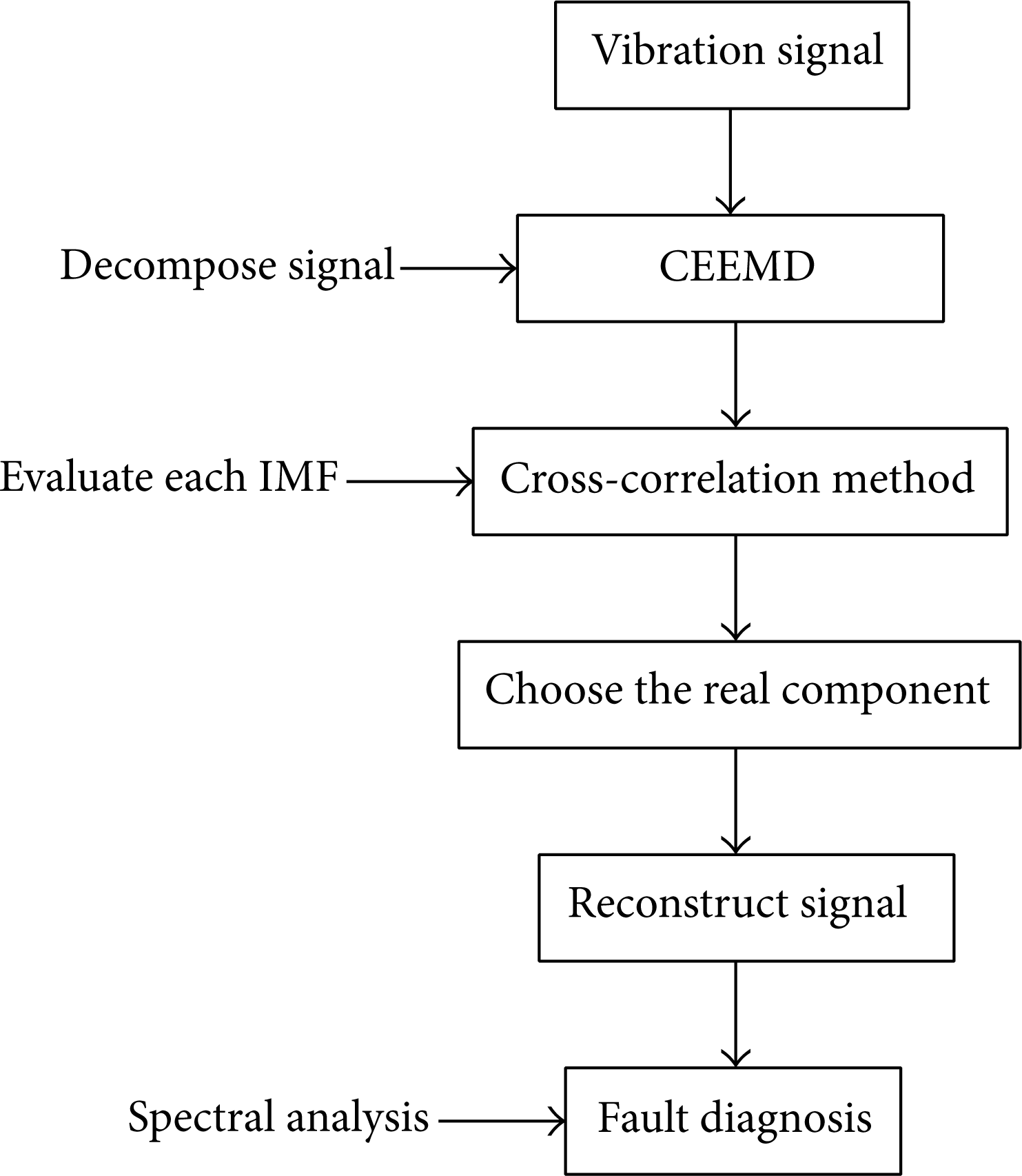
Researchers have done a lot of valuable work in EMD and its extensional algorithm. For instance, EMD was proved to be a dyadic filter bank and the properties of the white noise under EMD were also studied [12]. Rehman et al. [13] demonstrated that NA-MEMD is useful in comparison with EEMD by illustrative examples and performance evaluations. And the real world electroencephalography signals had been analyzed to prove the advantage of NA-MEMD. Mandic et al. [9] carried out time-frequency analysis of multivariate signals and gave a detailed introduction of EMD, EEMD, and MEMD. Then how the MEMD aligns intrinsic joint rotational modes was shown. In the aspect of bearing diagnosis, Wenzhi and Chao [14] introduced a bearing fault diagnosis method based on EEMD and support vector machine (SVM). Jianxin et al. [15] used EMD to decompose an acceleration signal and calculate the Lempel-Ziv complexity value in optimum analysis area. Zhou et al. [16] took advantage of EEMD to carry out demodulation spectrum analysis by the energy operator and then rolling bearing fault experiment proved the validity of the method. In general, the main process of bearing diagnosis by EMD and its extensional algorithm can be summarized as shown in Figure 1.
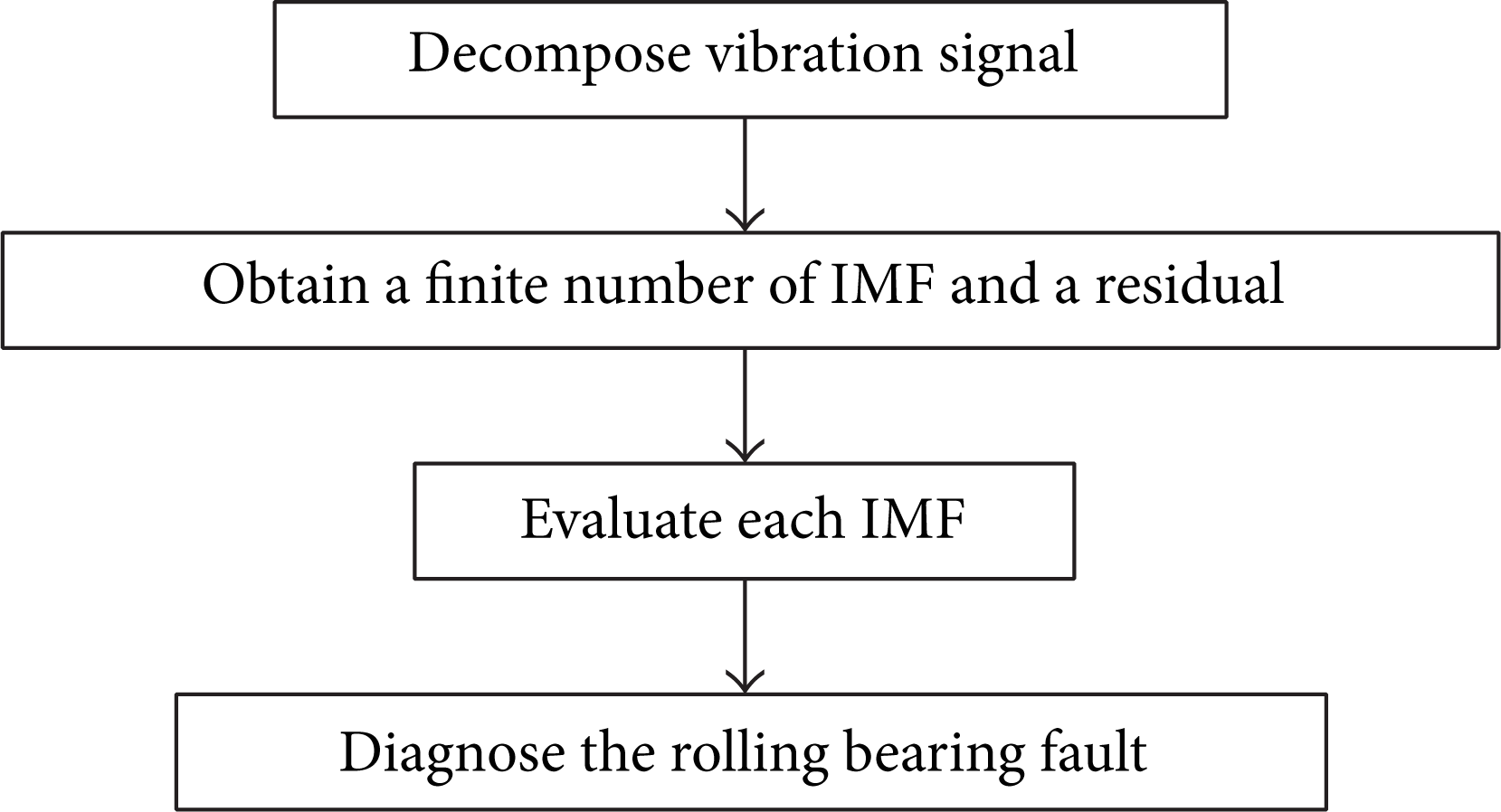
General process of bearing diagnosis by EMD and its extensional algorithm.
In general, both EMD and EEMD are widely used in vibration signal decomposition. For the third step as shown in Figure 1, time-domain or frequency domain indexes have been chosen to evaluate each IMF commonly, such as kurtosis index and energy operator. However, for bearing fault diagnosis, helpful information is often buried by a lot of noise that makes it difficult to identify the faults accurately.
This paper firstly proposed a method that combined CEEMD with correlation theory to detect the fault of rolling bearing. It is a new attempt which can be organized in the following steps: (1) decompose the signal containing fault information by CEEMD; (2) choose helpful IMFs by cross-correlation method to form a new signal; (3) carry out Hilbert transform and envelope spectrum on the new signal and then identify fault type. Secondly, the proposed method is used to analyze the data with varying rotating speed and different kinds of defect. Thirdly, EMD and its extensional algorithm are compared to discuss the best available method for bearing fault diagnosis. The analysis is supported by real signal acquired in an experiment.
2. EMD and Its Extensions
2.1. EMD Method
EMD is a data-driven technique, which needs two premises: (1) the original signal has a maximum point and a minimum point at least and (2) characteristic time scale is based on the time interval between extreme points. EMD decomposes a complex signal into a finite of single component signal called IMF under characteristic time scale [17–19]. These IMFs could represent the temporal mode present in the data. Meanwhile, they are required to be monocomponent and to have the following: (1) the numbers of zero-crossing and extreme point that either are equal or differ by exactly one; (2) upper and lower envelopes are local symmetry [20]. For a signal x(t), EMD algorithm mainly includes the following steps.
Find the locations of all the extrema of x(t).
By using cubic spline, connect the maximum points (resp., minimum points) to obtain the upper (resp., lower) envelopes.
Computer the median of upper and lower envelope, mi.
Subtract mi from x(t) to obtain temporary local oscillatory:

Repeat steps from (1) to (4) on hi until mi is close to zero. Then

and define ci as an IMF.
Computer the residue

Repeat the above steps using ri for x(t) to extract the next IMF and residue. Finally,

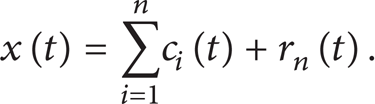
The original signal x(t) can be expressed as a sum of IMFs ci and a residual rn.
2.2. EEMD Method
Although EMD algorithm is very effective for bearing fault diagnosis, its output is prone to mode mixing and aliasing caused by overlapping of the IMF spectra and sub-Nyquist sampling [21]. EEMD method is proposed by Wu and Huang to overcome the above issues [8]. As white Gaussian noise is uniformly distributed in frequency domain, EEMD adds Gaussian noise to the original signal. In this way, EEMD populates the whole time-frequency space and IMFs are obtained from the ensemble mean of the corresponding IMFs. For a signal x(t), EEMD algorithm mainly includes the following steps [22].
Generate y n (t) for n = 1, 2,…, N as follows:

where
Decompose y n (t) by applying EMD to each realization y n (t) separately and then obtain N sets of IMFs.
Average the corresponding IMFs from the whole ensemble to obtain the averaged IMFs as follows:

Finally,
The original signal x(t) can be expressed as a sum of IMFs ci and a residual rn.
2.3. CEEMD Method
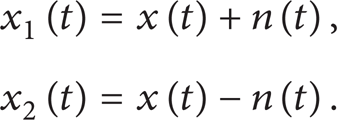
EEMD algorithm can inhibit modal mixing and aliasing problems. However it depends on a large number of iterations to reduce the effect of added noise. This has made EEMD perform better than EMD at a cost of increased computational complexity [23]. CEEMD is a new proposed method aiming at the shortcomings of EMD and EEMD. In CEEMD algorithm, a pair of white Gaussian noises is added to the original signal, respectively. There might be a computational time saving if the reconstruction of the final result is a concern, because the paired noises could effectively reduce the final white noise residue [24]. For a signal x(t), CEEMD algorithm mainly includes the following steps.
Add a pair of white Gaussian noises to x(t), generating two signals as follows:
Decompose
Repeat the above steps a few times and obtain two sets of ensemble IMFs as follows:
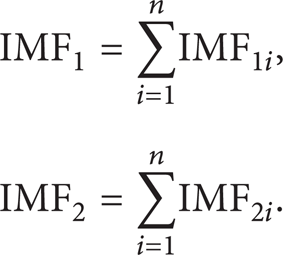
The final IMF is the ensemble of both the IMFs with positive and negative noises:
Finally,

The original signal x(t) can be expressed as a sum of IMFs ci and a residual rn.
2.4. NA-MEMD Method
Multivariate EMD has been proposed to process a general class of multivariate signals having an arbitrary number of channels [11]. For multivariate IMF, the stoppage criterion is similar to EMD. As extrema cannot be defined for multivariate signals, the condition for equality of the number of extrema and zero-crossing is not imposed in MEMD. To calculate envelops and local mean of multivariate signals, real-valued projections along multiple directions on hyperspheres are used. MEMD successfully solves the problem that EMD and EEMD cannot decompose multivariate signals. Despite its merits, MEMD inherits a degree of mode mixing. NA-MEMD is proposed to eliminate the interference of noise in EEMD and reduce the mode mixing in both EMD and MEMD [13]. By introducing extra channels of multivariate noise, the effects of mode mixing and aliasing could be reduced. For a multivariate signal (n-channel), NA-MEMD algorithm mainly includes the following steps.
Generate an uncorrelated white Gaussian noise time-series (l-channel) of the same length as that of the input, where l≥1.
Add the noise channels created in step (1) to the input multivariate (n-channel) signal, n≥1, and then obtain an
Process the
From the resulting IMFs, discard the l-channels corresponding to the noise, giving a set of n-channels IMFs corresponding to the original signal.
3. Cross-Correlation Method
Cross-correlation function R xy (τ) shows the correlation of two signals. It is widely used in biology, mathematics, medicine, and some other fields. For instance, cross-correlation technique is used to develop dynamic digital image techniques with continuous parameters and detect structural damage [25]. Speckle cross-correlation method is applied to measure fine surface displacements [26].
In the process of bearing diagnosis, bearing fault signals acquired from the experiment are usually mixed with a lot of noises. As mentioned in Section 2, IMFs could represent the temporal mode present in the data. As a consequence of this, there will be some IMFs that represent the noises in original signal. That becomes an obstacle to the subsequent processing. Therefore, this paper will use cross-correlation method to evaluate each IMF. For a discrete-time signal, cross-correlation function can be defined as

The signal x(t) can be expressed as a sum of several IMFs ci in theory. Because of the influence of noise, outputs of CEEMD include some real components (which contain more fault information) and some illusive components (which contain more noises). Real components are denoted by cr, while illusive components are denoted by rk. Then
where cr is approximately equal to ci.
Cross-correlation coefficient between x(t) and cr is

As EMD is local orthogonal,

That is,

Cross-correlation between x(t) and rk is

From what has been discussed above, it can be concluded that cross-correlation coefficient between original signal and real component is approximately equal to the real component's autocorrelation coefficient, while the cross-correlation coefficient between original signal and illusive component is very small. Therefore, cross-correlation method can be used to choose effective IMFs.
4. Practical Application
Practical examples of fault diagnosis for rolling bearing are given to verify the proposed method. This section also compared the proposed method with EMD and its extensional algorithm to illustrate the availability.
4.1. Experimental System
The experimental setup including an experimental platform and rolling bearings is shown in Figure 2. As inner race defect and outer race defect are commonly faults for rolling bearing, N205EM bearings with artificial defect shown in Figure 3 were utilized. The flaw is divided into two kinds, one is of width 0.4 mm and depth 0.25 mm and the other is of width 0.2 mm and depth 0.05 mm. In this experiment, an accelerometer installed on the bearing housing was used to inspect the vibration signals. To acquire more complete information, sampling frequency was set at 10 kHz, and sampling time is 10'sec. Rotating speed was, respectively, set at 590 rpm, 890 rpm, 1180 rpm, and 1480 rpm to verify the validity of the proposed method under different condition.
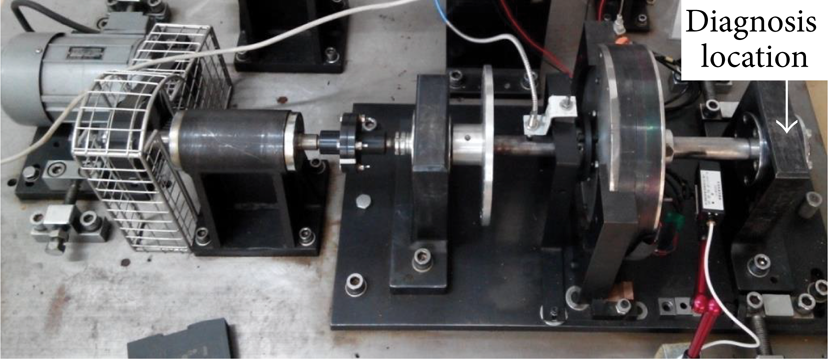
Experimental setup.

Artificial defects.
4.2. Pass Frequency of Rolling Bearing
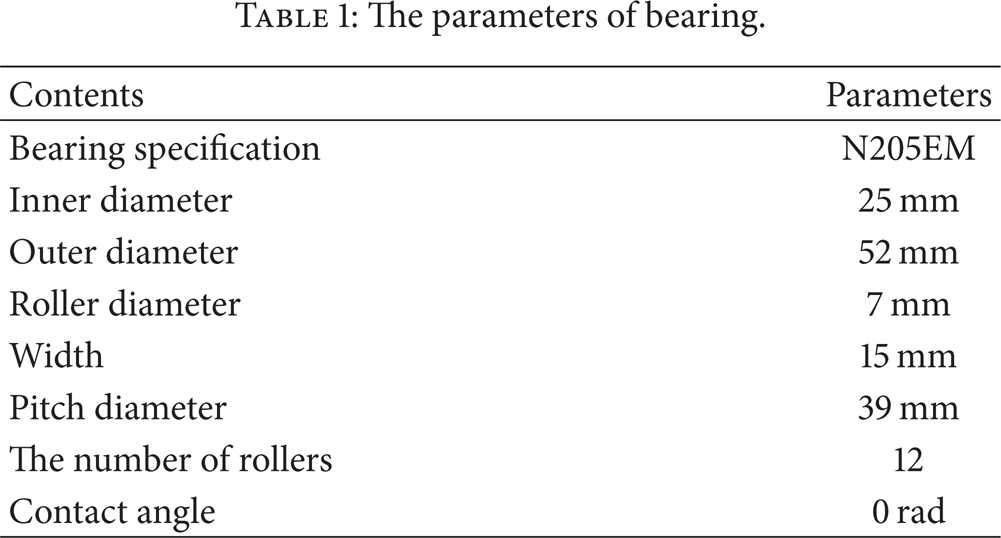
The relevant information of bearing is given in Table 1. Bearing defects will generate a series of impact vibrations which occur at bearing characteristic frequencies every time a running roller passes over the surfaces of defects [13]. Therefore the type of defects can be determined by identifying the characteristic frequency. For bearing with stationary outer race, these characteristic frequencies are given by the following equations [27].
The parameters of bearing.
Pass frequency of inner race is

Pass frequency of outer race is

where z is the number of rolling elements, fr is rotating frequency (Hz), d is roller diameter (mm), D is pitch diameter (mm), and α is contact angle (rad).
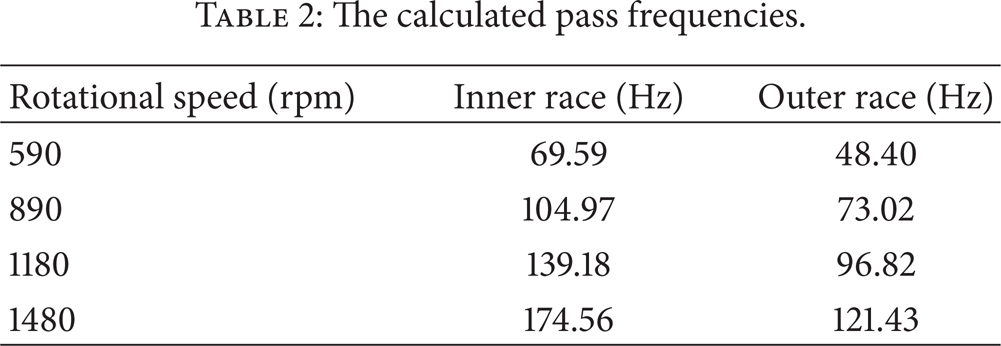
According to the parameters in Table 1 and the equations above, calculated pass frequencies are shown in Table 2. Pure rolling motion is a condition of the above equations. As there may be some sliding motion in practice, the result in Table 2 is just approximate value.
The calculated pass frequencies.
4.3. Method Verification
From the analysis above, the process of diagnosis is shown in Figure 4. It can be summarized in the following steps.
Decompose the vibration signal measured in diagnosis location by CEEMD.
Generate a set of IMFs. Calculate the cross-correlation coefficient between original signal and each IMF.
Choose the IMF with larger cross-correlation coefficient.
Multiply the IMFs by their corresponding cross-correlation coefficient, respectively, and add up the product to form a new signal.
Calculate characteristic frequency by Hilbert transform and fast Fourier transform (FFT).
Compare with the values in Table 2 and then identify the fault type.
The process of diagnosis.
4.4. Analysis of Experimental Data by the Proposed Method
Fault signal of inner race (the flaw is of width 0.4 mm and depth 0.25 mm) at 1480 rpm collected in the experiment was used to analyze. A pair of white Gaussian noise n(t) was added to the fault signal x(t) to generate two signals, x1(t) and x2(t), where the standard deviation of n(t) is 0.2. According to the steps of CEEMD, x1(t) and x2(t) were decomposed and a set of IMFs was generated. Then calculate the cross-correlation coefficient between x(t) and each IMF; the results are shown in Table 3. It can be seen that the cross-correlation coefficients IMF1, IMF2, and from IMF10 to IMF18 are close to zero, while IMF3–IMF9, which are bold in Table 3, are significantly higher than others. It can be concluded that IMF3–IMF9 contain more information of the original signal x(t). Hence, we can see IMF3–IMF9 as effective component and abandon IMF1, IMF2, and IMF10–IMF18. Multiply the effective component by their corresponding cross-correlation coefficient respectively, and add up. Finally, Hilbert transform and fast Fourier transform (FFT) were carried out on the new signal. The result benefits from the spectrum shown in Figure 5(a). Characteristic frequency at 173.7 Hz can be clearly observed which is very close to the calculated inner race pass frequency at 174.56 Hz. Therefore, it is identified as the inner race defect. Similarly, outer race defect can be identified. The spectrum is shown in Figure 5(b).
Cross-correlation coefficient between x(t) and each IMF.

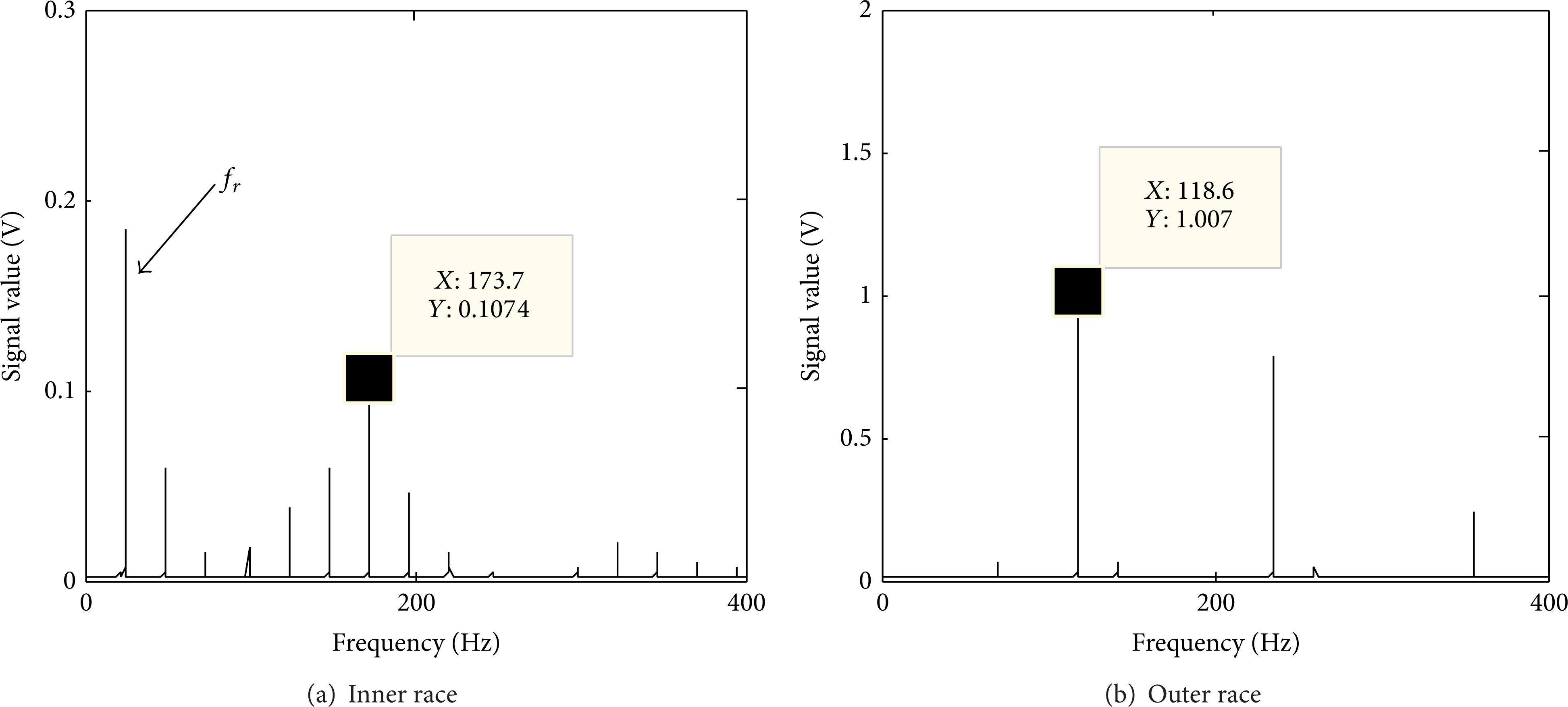
Spectrum of bearing defect (1480 rpm).
Traditional methods often perform well in high speed condition. When the rotational speed is low, bearing fault is difficult to identify. In order to verify the applicability of the proposed method under condition of low speed, the signals collected at diffident rotational speed were analyzed. Figure 6 shows the results at 590 rpm. It is obvious that the characteristic frequencies and their harmonics can be clearly observed, and they are all very close to the calculated pass frequency. For 890 rpm and 1180 rpm, the results are similar. It is proved that the proposed method is not only effective in high speed condition, but also available in low speed condition.

Spectrum of bearing defect (590 rpm).
Bearing failure is usually a gradual process. For incipient bearing fault, the signal caused by vibration is very weak and buried by a lot of noise. As it is significant to study incipient fault of bearing, the proposed method is used to detect the weak fault. The weak fault (the flaw is of width 0.2 mm and depth 0.05 mm) signal measured in the experiment is analyzed. The results are shown in Figure 7. It is obvious that the fault can be identified clearly, and most of the noise is eliminated efficiently. Even in lower speed, as (c) and (d), characteristic frequency and its harmonic are outstanding. It concludes that the proposed method has good performance for the incipient fault diagnosis of rolling bearing. For 890 rpm and 1180 rpm, the results are similar.
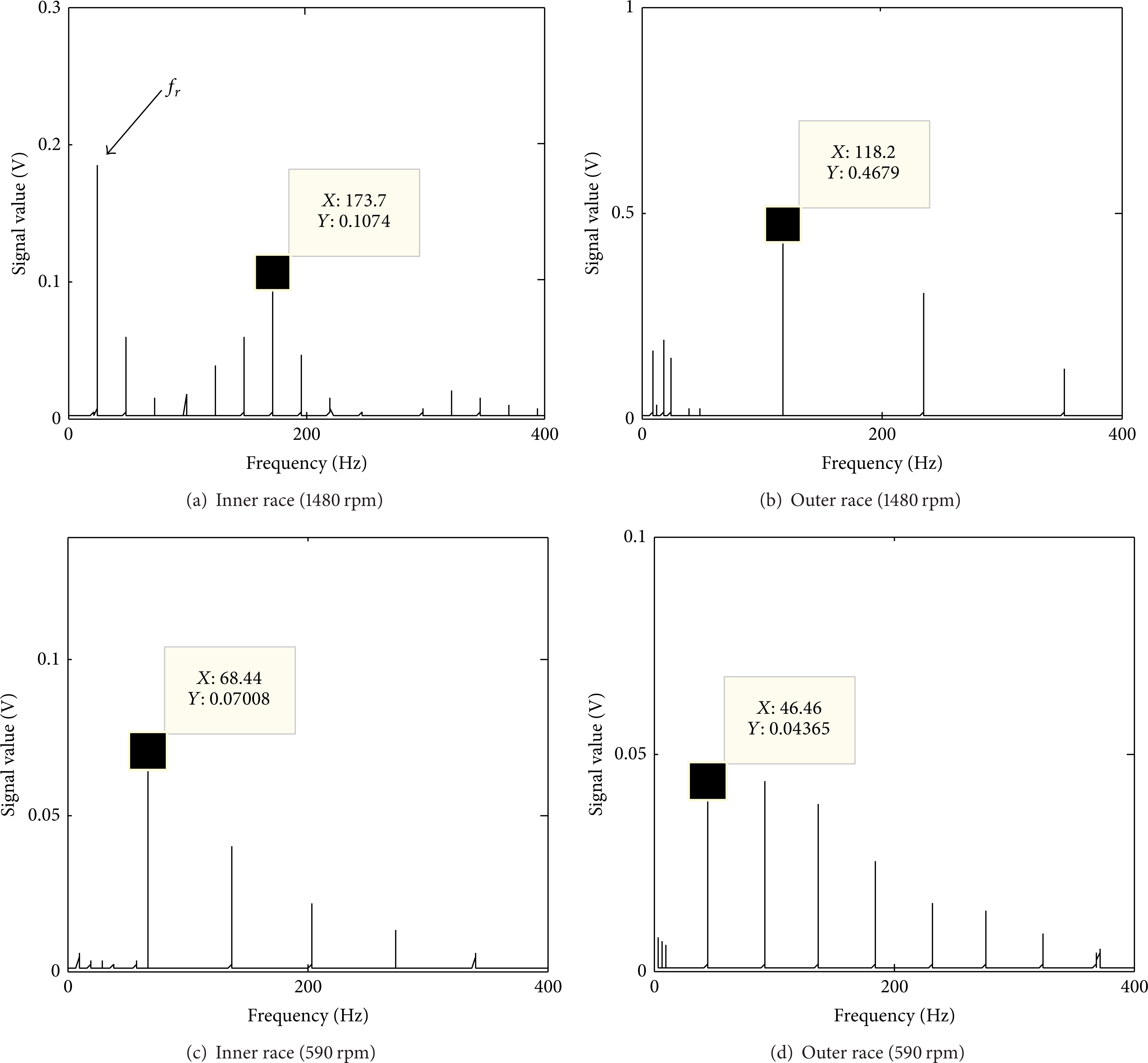
Spectrum of bearing weak defect.
4.5. Comparison of EMD and Its Extensional Algorithm
In this section, the proposed method was compared with EMD and its extensional algorithm. The analysis process is similar to the steps mentioned in Section 4.2, except that CEEMD was replaced with EMD, EEMD, and NA-MEMD, respectively. A signal collected in the experiment is used to support the following analysis. Additionally, the computing time of each algorithm is shown in Table 4.
Decompose the original signal by EMD. The result is shown in Figure 8(a). Characteristic frequency at 138.2 Hz is very close to the calculated pass frequency at 139.18 Hz. But a lot of noise is residual, and the characteristic frequency is not obvious.
White Gaussian noise w n (t)∼N(0, 0.22) is added to the original signal. Decompose the original signal by EEMD. The iteration of EEMD is 100 times, and result is shown in Figure 8(b). Characteristic frequency at 138.2 Hz is close to the calculated pass frequency at 139.18 Hz. Little noise is residual, and the characteristic frequency is obvious. Seemingly, EEMD is better than EMD. However, it costs a large amount of time to calculate.
White Gaussian noise
Generate an uncorrelated white Gaussian noise time-series (two-channel) and add it to the input signal, to obtain a three-channel multivariate signal. Process the new signal by MEMD. As shown in Figure 8(d), the result is similar to CEEMD. However, due to the increased data size and complicated algorithm, computational efficiency is reduced.
Computing time of each algorithm.

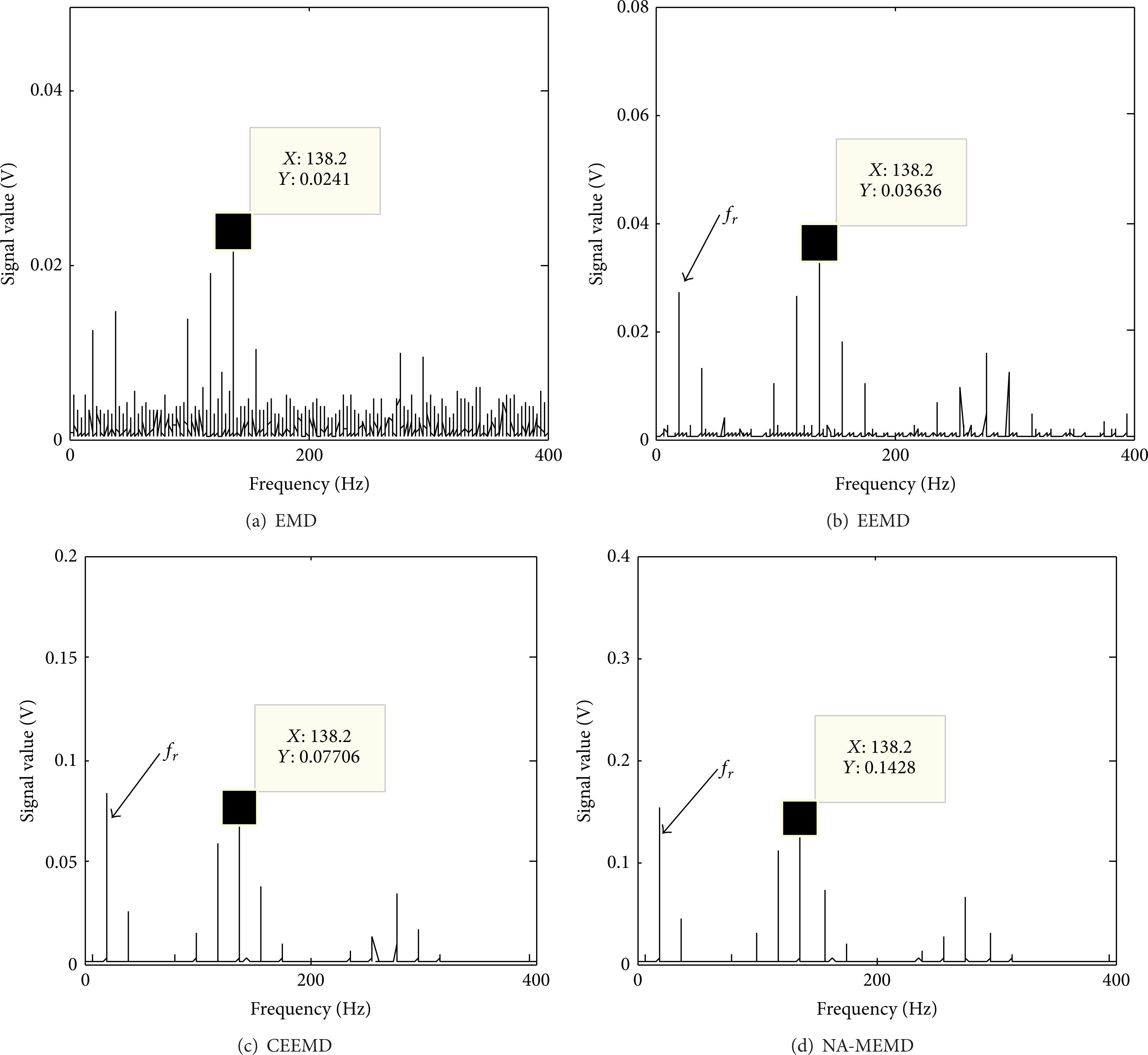
Comparison of EMD and its extensional algorithm.
From the analysis above, it can be concluded that all the methods are able to detect the fault, but the performance is different. In effect, EMD and EEMD did not achieve the results as well as CEEMD and NA-MEMD. On the other hand, because rolling bearing diagnosis often needs a higher sampling frequency to obtain more comprehensive information, the data size of vibration signal is very large. In particular, when the channel is added, a large amount of data makes computational efficiency reduced. Therefore, NA-MEMD performs much worse than CEEMD in efficiency. Certainly, NA-MEMD is proposed to cater for multichannel signals. This is an advantage that CEEMD does not have. As fault diagnosis of rolling bearing is usually based on one-dimensional vibration signal, the proposed method will be more suitable.
In conclusion, CEEMD has not only the good effect but also high computational efficiency. For fault diagnosis of rolling bearing, it is more suitable than other algorithms.
5. Conclusions
Feature extraction of signals is an important part of machinery fault diagnosis. As measured vibration signals often contain strong noise, feature extraction becomes more difficult. In order to eliminate the noise and extract the fault information, this paper proposed a method that combines CEEMD with correlation theory. The cross-correlation coefficient between the original signal and each IMF was calculated to select the effective IMF and reduce the noise. The signals collected in the experiment were analyzed to support the proposed method. In addition, the proposed method was compared with EMD and its extensional algorithm.
From the analysis results above, the following conclusions can be drawn. Firstly, the proposed method that combines CEEMD with correlation theory is available for detecting the bearing faults. It reduces the noise and overcomes modal mixing and aliasing effectively. Secondly, the proposed method has wide application. It is able to detect the fault accurately when the rotating speed is either high or low. And it is also capable of detecting the bearing faults at early stage. Finally, compared with EMD and its extensional algorithm, the proposed method has higher computational efficiency, and it is able to overcome modal mixing and aliasing. Therefore, the proposed method is more suitable for rolling bearing diagnosis.
Conflict of Interests
The authors declare that they have no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This project is supported by the National Natural Science Foundation of China (Grant nos. 51375037, 51135001, and 51405012) and Program for New Century Excellent Talents in University (NCET-12-0759).