
Abstract
The problem of finite-time vibration-attenuation controller design for buildings structural systems with parameter uncertainties is the concern of this paper. The objective of designing controllers is to guarantee the finite-time stability of closed-loop systems with a prescribed level of disturbance attenuation. First, based on matrix transformation, the structural system is described as state-space model, which contains parameter uncertainties. Then, based on finite-time stability analysis method, some sufficient conditions for the existence of finite-time vibration-attenuation controllers are obtained. By solving these conditions, the desired controllers can be obtained for the closed-loop system to be finite-time stable with the performance ∥z∥2 < γ∥ω∥2. It is shown by the simulation results, that compared with some Lyapunov asymptotic stability results, finite-time stability control can obtain better state responses, especially while the system is under nonzero initial states.
1. Introduction
In recent years, more and more high-rising buildings are built up due to the limitation of land. Such kinds of buildings not only help save the source of land, but also present a better scene to people. However, some strong earthquakes and wind, such as the 2008 Wenchuan Earthquake, the 2010 Yushu Earthquake, and the 2011 Japanese tsunami, happened frequently in past several years. These excitations inevitably induce large vibrations which make those high-rising buildings deformation, fatigue damage, and even falling down. Thus, vibration control for high-rising buildings has received considerable attention, and some vibration control methods, such as passive control, semiactive control, and active control, were proposed for attenuating seismic or wind excitation. Passive and semiactive controls have some virtues, such as low energy consumption and low cost. However, as buildings become higher and higher, structural stability and solidity are challenged and cannot be guaranteed only by those passive and semiactive control methods. Therefore, the status of active control for seismic-excited or wind-excited buildings becomes more and more significant. Recently, many scholars have applied themselves to the research of active vibration control and many control strategies have been utilized, such as classical H∞ theories [1–4], energy-to-peak control [5–7], finite frequency control [8], sliding mode control [9, 10], adaptive control [11], fuzzy control [12, 13], neural networks [14, 15], and optimal control [16], and have been developed to attenuate the vibration excited by earthquake or winds. Accompanied with the development of active vibration control techniques, some active control devices were designed for applying those control algorithms; for example, magnetorheological dampers [17], active mass damper (AMD) [18], active brace system (ABS) [19], electrohydraulic servo system [20], and so forth have been widely studied and used for vibration attenuation.
It is worth to point out that most of the existing results are obtained based on Lyapunov stability analysis method, which cares about the asymptotic convergence of the system, while t→∞. However, most of those earthquakes or strong winds happen in a very short time, and it is often the peak values of displacements or accelerations that make the buildings damaged. Thus, a better performance can be expected if finite-time stability analysis method is taken into consideration. The concept of finite-time stability was first introduced in the Russian literature [21]. A system is said to be finite-time stable if, given a bound on the initial condition, its state does not exceed a certain domain during a specified time interval. Recently, the problem of finite-time stability of regular or singular systems has received considerable attention. For example, based on Lyapunov functional, [22] discussed the finite-time stability of a class of stochastic nonlinear systems. In terms of LMI technique, some sufficient conditions were given in [23] for the uncertain discrete singular systems to be finite-time stable and stabilizable. For more results about the finite-time stability, the readers can refer to [24–26] and the references therein. However, to the best of the authors’ knowledge, although most of the stability analysis theories have been extended to the stability analysis of structural systems, we still have not found any published paper concerning the finite-time stability of buildings structural system. That is to say, the finite-time vibration-attenuation controller design for buildings structural system is still not fully investigated.
This paper is concerned with the problem of finite-time vibration control of earthquake excited buildings structure with parameter uncertainties. Firstly, based on matrix transformation, the linear state-space model of buildings with parameter uncertainties is established. Secondly, based on a Lyapunov functional and finite-time stability analysis method, the LMIs-based conditions for the structural system to be finite-time stabilizable are established. By solving these LMIs, the desired controller is obtained for the closed-loop system to be finite-time stable with the performance
The organization of this paper is as follows. Section 2 formulates the problem and presents the dynamic models. The main results are given in Section 3. The illustrative examples are given in Section 4 to show the applicability and improvement of the presented approaches. Finally, the paper is concluded in Section 5.
Notation. Throughout this paper, for real matrices X and Y, the notation X≥Y (resp., X>Y) means that the matrix X-Y is semipositive definite (resp., positive definite). I is the identity matrix with appropriate dimension, and a superscript “T” represents transpose.
2. Problem Formulation and Dynamic Models
Consider an n degree-of-freedom structural system. The system under consideration is depicted in Figure 1. The linear structural model equation can be written with [1–8]

where


n-degree-of-freedom structural system.
Defining the state variables as

where C
z
is real constant matrix with appropriate dimensions,

Consider that the system has parameter uncertainties, and, in particular, the parameter uncertainties are induced by the variations of stiffness and damping coefficients [27]. By assuming that the uncertain

we can describe the uncertain system by state-space equation of the following form:

where F is the controller gain to be designed later, and the uncertain matrix A(θ) satisfies
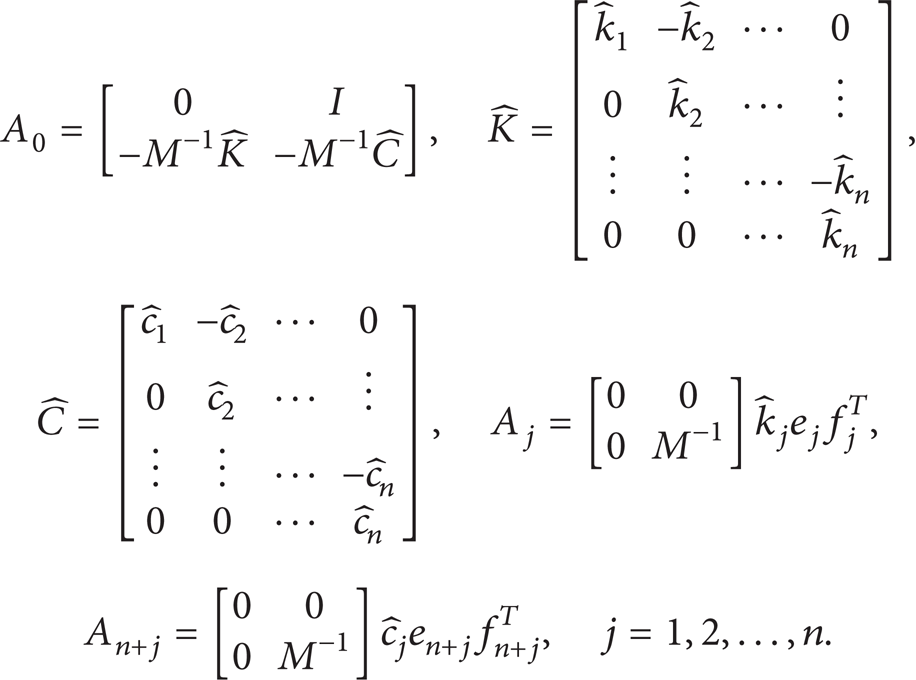
e j ∈ R2n, f j ∈ R2n, en + j ∈ R2n, and fn + j ∈ R2n are all column vectors.
Definition 1 (see [23]). The system (6) is said to be finite-time H∞ stabilizable with respect to

for any
Definition 2. The system (6) is said to be robustly finite-time H∞ stabilizable with respect to
3. Main Results
Theorem 5. The system (6) without uncertainties is finite-time H∞ stabilizable with respect to

Furthermore, a state-feedback controller is described as F = GP−1.
Proof. By substituting the control law u(t) = Fx(t) into system (6) with θ
j
= 0

Choose a Lyapunov-Krasovskii functional candidate as

where

where
By pre- and postmultiplying (9) with diag{P−1 I I} and its transpose, considering G = FP, and according to the Schur Compliment, we can obtain

From (13) and (14), it is easy to obtain

Integrating both sides of (15) from 0 to t with

By Lemma 3, it has

According to (12), we have

that is,

Furthermore, it holds

In view of (17)–(21), it yields

By considering the conditions (10), we can obtain x T (t)Rx(t)<κ22.
Next, we will establish the
Obviously, (23) implies
Remark 6. By solving matrix inequalities (9) and (10) of Theorem 5, we can obtain a finite-time H∞ stabilization controller, with which the closed-loop system has not only the H∞ performance
Remark 7. It is worth to point out that (10) is not a linear inequality; however, from a computational point of view, obtaining a set of LMIs is more desirable. Fortunately, based on some matrix transforms, we obtain the following LMIs-based corollary, which guarantees finite-time H∞ stability of the closed-loop systems.
Corollary 8. The system (3) without uncertainties is finite-time H∞ stabilizable with respect to

Furthermore, a state-feedback controller is described as F = GP−1.
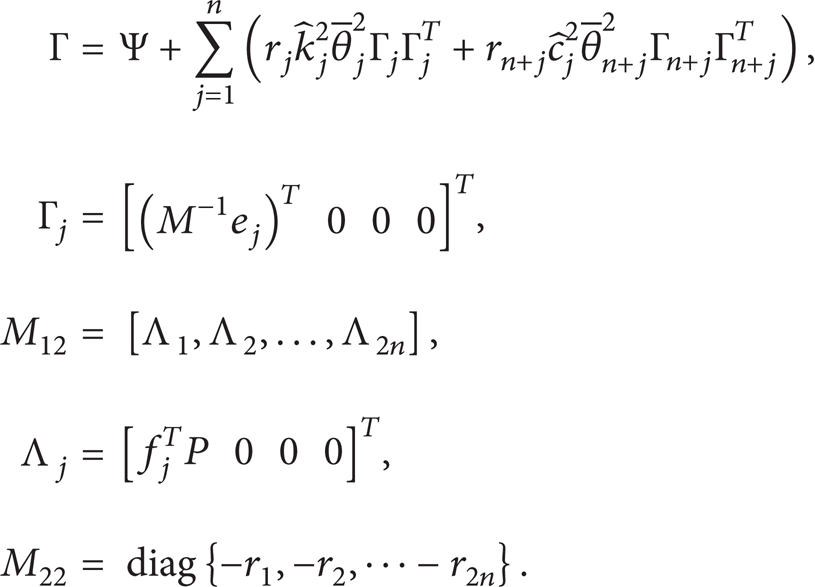
Theorem 9. The system (3) is robustly finite-time H∞ stabilizable with respect to

where

Furthermore, a state-feedback controller is described as F = GP−1.
Proof. Replacing A0 with

By Lemma 4, (28) holds if and only if there exist positive scalars r1,r2,…, r2n, such that

Applying the Schur complement, LMI (29) is equivalent to LMI (26). This completes the proof.
4. Illustrative Example
Consider the structural system with n = 3. The structural parameters are m
i
= 1000 kg,
where
Assume that the displacements and velocities of the three storeys are all measurable for feedback in this case. The controlled output is chosen to be the interstorey relative drift; that is, z(t) = [xm1(t) xm2(t) xm3(t)]
T
. In order to verify the dynamics of the closed-loop system, a time history of acceleration (see Figure 2) from EI Centro 1940 earthquake excitation is applied to this system. The excitation has
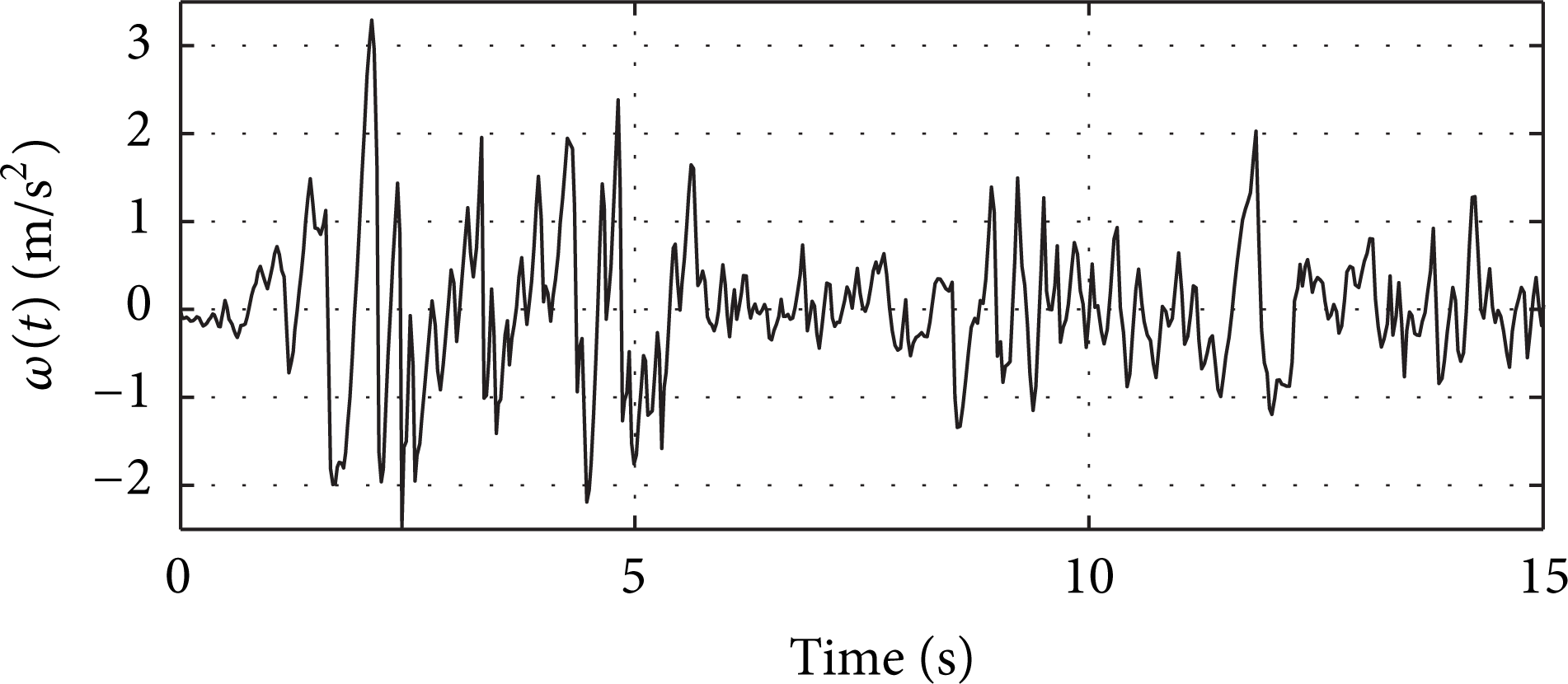
The time history of acceleration from EI Centro 1940 earthquake excitation.
Firstly, consider the system without uncertainties; that is, θ
j
= 0
For description in brevity, we denote this designed controller as controller I thereafter. In order to facilitate the comparison, we obtain another H∞ state feedback controller, which does not involve the finite-time stability, by solving Theorem 9 in [30] with γ = 0.2, and this controller has the following gain:
We denote this state feedback controller as controller II thereafter. Consider that the initial condition of the system satisfies
The maximum displacements and accelerations of the open-loop and closed-loop systems, which are composed of controllers I and II, respectively (under zero initial states).

Displacement responses of the open-loop and closed-loop systems, which are composed of controllers I and II, respectively (under zero initial states).

Acceleration responses of the open-loop and closed-loop systems, which are composed of controllers I and II, respectively (under zero initial states).
Remark 10. From this example, we can obtain the finite-time H∞ controller that can obtain much better displacements’ and accelerations’ responses than the classical H∞ controller, and the state constraint x(t) T Rx(t) ≤ κ22 is reached by the finite-time H∞ controller, obviously.
Then, we consider the initial condition satisfying
Now, let us come to see the uncertain case. The uncertainties are applied to the damping coefficients of the structural system and the parameter uncertainties satisfy




For description in brevity, we denote this designed controller as controller III thereafter. Consider a vertex case:
The maximum displacements and accelerations of the open-loop and closed-loop systems, which are composed of controllers I and II, respectively (under nonzero initial states).


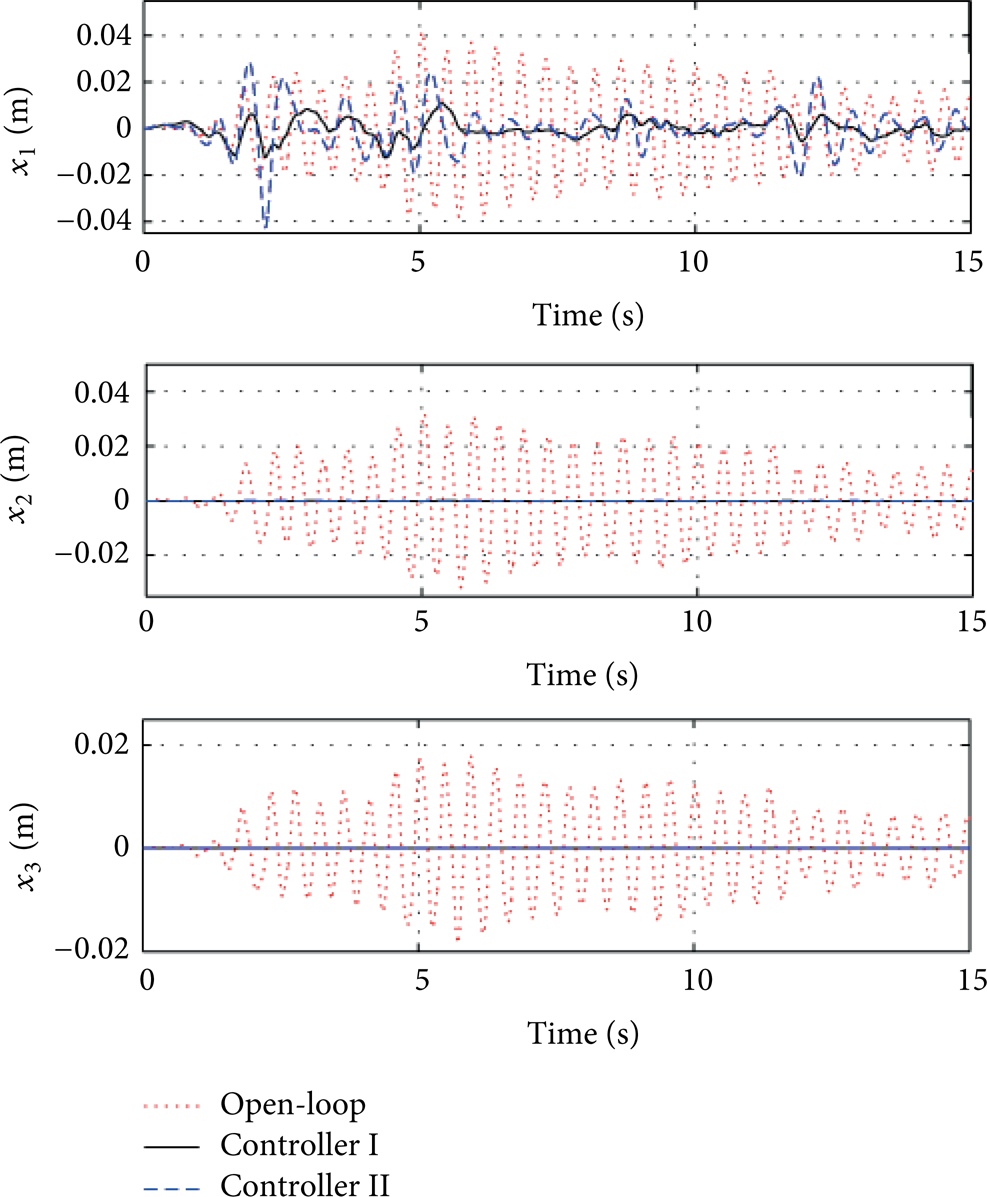
Displacement responses of the open-loop and closed-loop systems, which are composed of controllers I and II, respectively (under nonzero initial states).
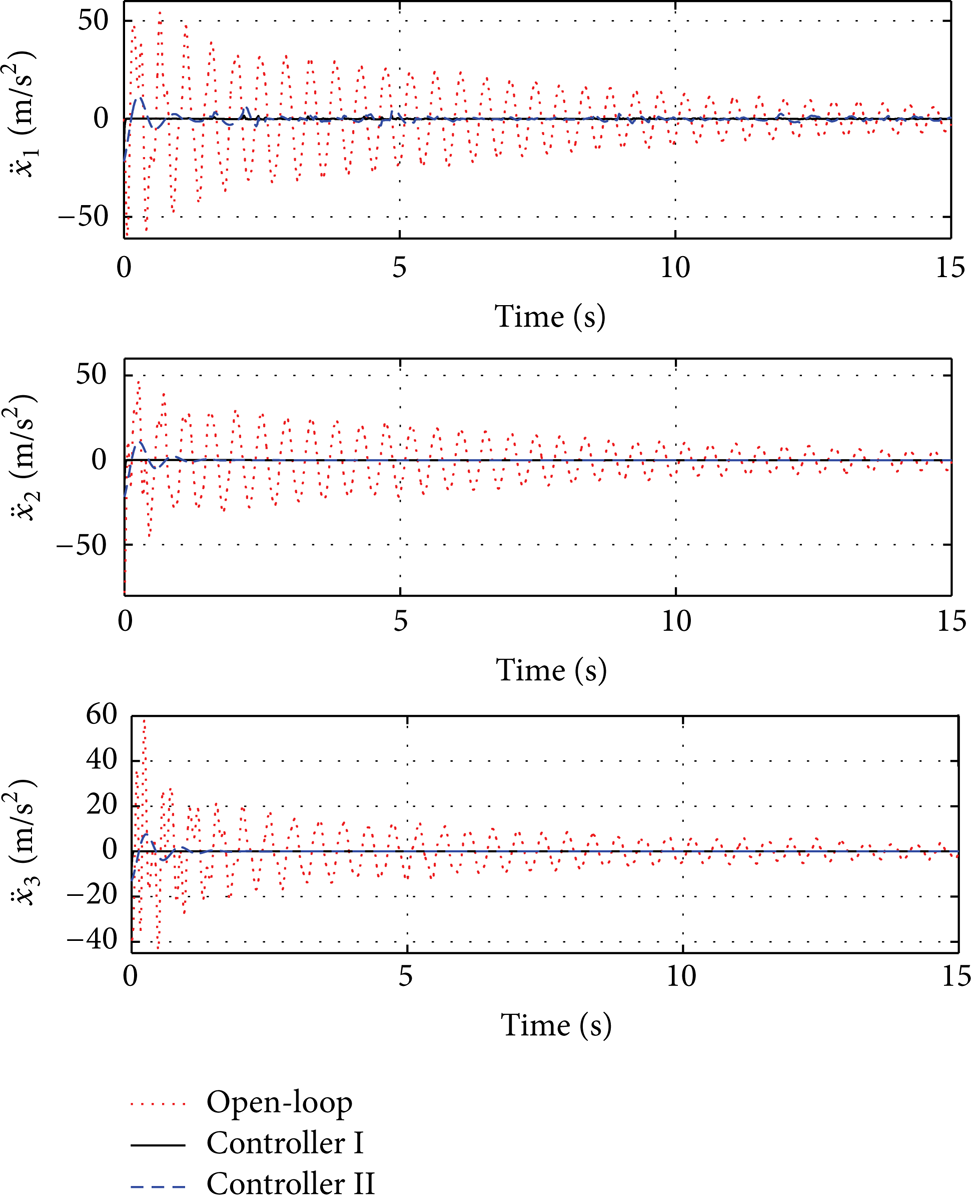
Acceleration responses of the open-loop and closed-loop systems, which are composed of controllers I and II, respectively (under nonzero initial states).
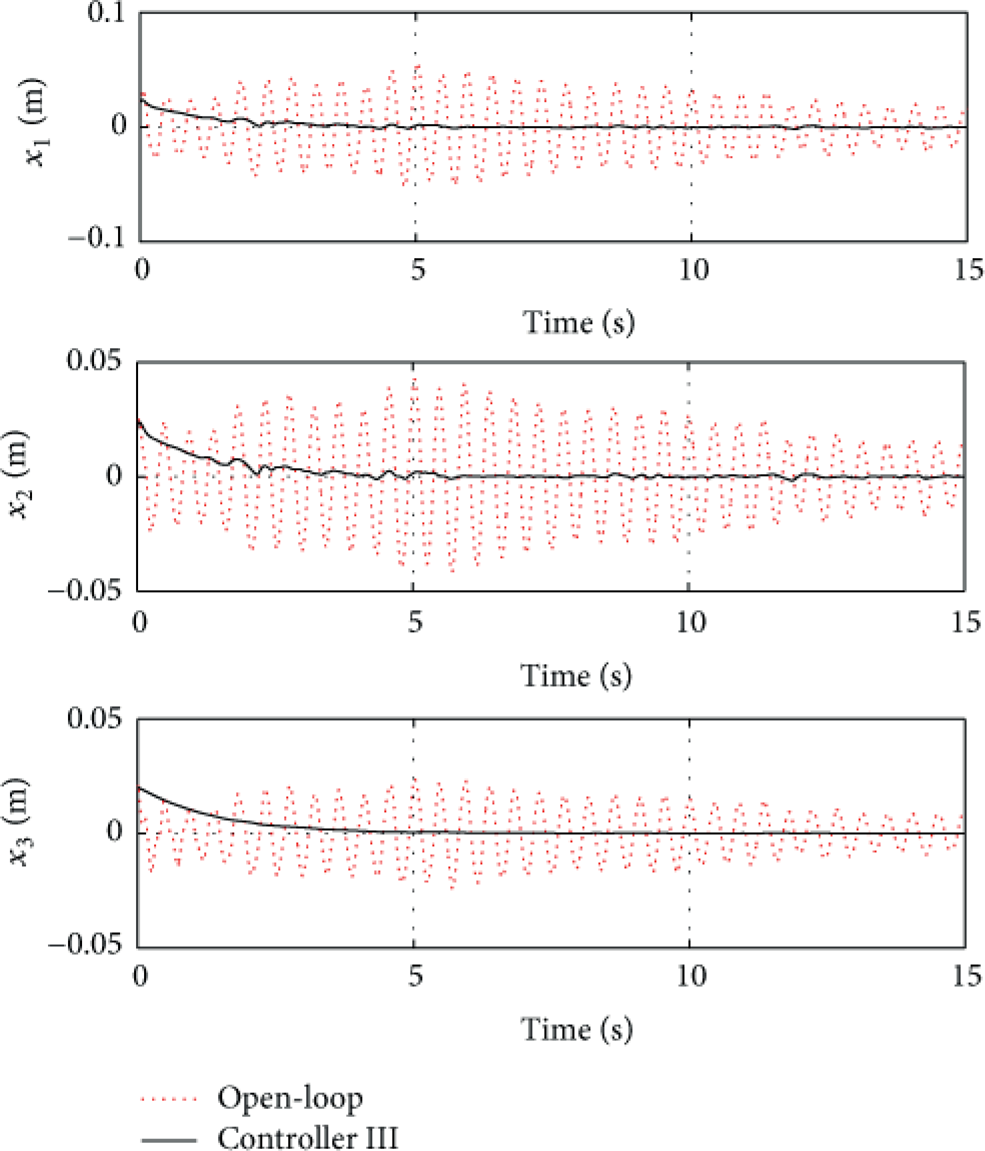
Displacement responses of the open-loop and closed-loop system, which is composed of controller III.

Acceleration responses of the open-loop and closed-loop system, which is composed of controller III.
5. Conclusion
The finite-time vibration control of earthquake excited buildings structure with parameter uncertainties has been investigated in this paper. First, based on matrix transform, the buildings structural system is described as a state-space model, which contains parameter uncertainties. Secondly, based on a Lyapunov functional and finite-time stability analysis method, some sufficient conditions for the existence of finite-time vibration-attenuation controllers are obtained. If the feasibility problem of these conditions is solvable, the desired controller can be obtained for the closed-loop system to be finite-time stable with a prescribed level of disturbance attenuation. The condition is also extended to the uncertain case. Finally, the simulation results are given to show the effectiveness of the designed controllers.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This work was partially supported by the National Natural Science Foundation (nos. 61305019 and 51365017), Jiangxi Provincial Natural Science Foundations (nos. GJJ13430 and GJJ13385), and the Science Foundation of Jiangxi University of Science and Technology of China.