
Abstract
The vibration signal of local gear fault is mainly composed of two components. One is the resonant signal and noise signal and the other one is the transient impulse signal including fault information. The quality factors corresponding to the two components are different. Hence, a method to diagnose local gear fault based on composite quality factor basis and parallel basis pursuit is proposed. First, two different quality factors bases are established using wavelet transform of variable quality factors to obtain the decomposition coefficient. Next, the parallel basis pursuit is adopted for the optimization of the decomposition coefficient. With the derived optimal decomposition coefficient, the resonant components with different quality factors can be reconstructed. By discussing the sparsity of signals treated with different quality factors bases, the suitable composite quality factor basis is selected to perform sparse decomposition on the signal. Besides, the obtained resonant component with low quality factor is subject to demodulation analysis, so as to derive the fault information. The feasibility and validity of the algorithm are shown by the results from simulation signal and practical application of local gear faults.
1. Introduction
Gear is a very important transmission part of rotating machineries. The normal operation of gear is directly related to producing benefit and facility security [1, 2]. Therefore, it is necessary to monitor the operating state of gear and perform fault diagnosis. When local faults such as pitting and teeth breaking occur on a gear, the complex vibration signals generated by the interaction of periodic rotation of machine, periodic excitation by the fault, and interferences from surrounding environment consist of periodic component and random component, which are expressed as modulation format. The key of extracting fault features is to obtain modulation information of amplitude or frequency. A common method used in the fault diagnosis in gear is the envelope demodulation technique. However, the filtering parameters in the demodulation process are determined according to the experience of operator or historical data [3, 4], which will influence the accuracy of diagnosis. By using adaptive signal decomposition approaches such as empirical mode decomposition (EMD), the vibration signal of gear fault can be automatically decomposed into several components [5–8] and then the appropriate component can be selected for demodulation analysis. However, how to choose the appropriate component is still being studied. When a local gear fault happens, a transient impact impulse will be aroused in the vibration signal of gear, and the frequency of the impulse is generally the fault feature frequency of gear signal. Hence, the key for the fault diagnosis of gear is to extract the transient impact impulse from the nonstationary multicomponent modulation signal.
Presently, most methods for diagnosing local gear fault are to decompose the signal based on frequency division [7, 9–12]. A prominent problem of traditional methods is that the factors of center frequency and frequency band are not considered. There is a lack of self-adaption when separating the signals which share similar center frequencies and overlapping frequency bands.
In order to solve the problem, Li proposed a sparse decomposition method based on resonant signal [13] and construct a basis functions according to the QF which is the ratio of center frequency to band. By this way, the transient impact signal and the periodic signal of persistent oscillation can be distinguished. Then, the persistent oscillation component is defined as high-frequency resonant component while the transient impact component is defined as low-frequency resonant component.
In this paper, with the approach of resonant sparse decomposition of signal, a method to diagnose and analyze local gear fault based on CQFBs and PBP, is proposed. The nonstationary and multicomponent modulation signal of local gear fault is expressed as the combination of persistent oscillation with high QF and the transient impulse component with low QF. First, two different QF bases are established with wavelet transform of variable QF. The signal is then subject to sparse decomposition, and the decomposition coefficient can be obtained. Next, the PBP is adopted for the optimization of the decomposition coefficient. With the derived optimal decomposition coefficient, the resonant components with high QF and low QF can be reconstructed. By discussing the sparsity of signals treated with different QF bases, the suitable CQFB is selected to perform sparse decomposition on the signal. Besides, the obtained resonant component with low QF is subject to demodulation analysis. Results of simulation analysis and practical application have shown that the approach can conduct sparse analysis on the fault signal quickly and correctly and extract the transient impact impulse of the fault signal. As a result, a new idea is provided for researches on the nonstationary and multicomponent modulation signal of the local gear fault.
2. Composite Quality Factor Basis (CQFB)
The wavelet transform with adjustable QF is completely discrete. The value of QF of the wavelet basis can be adjusted arbitrarily, and it can be selected according to the self-adaption design of oscillation degree of the signal to be analyzed [14–16]. It is exactly what is needed to construct the QF basis, and then the library of basis functions can be acquired using the wavelet transform with adjustable QF. The signal produced by local gear fault is composed of the persistent oscillation component and the transient impact component. Therefore, the sparse presentation cannot be conducted with any single QF basis, and the signal cannot be separated with traditional linear analysis method. Hence, an approach for the sparse composition of local gear fault based on the composite QF basis is proposed in order to perform an effective sparse decomposition.
The signal decomposition based on composite QF basis uses the two-channel filter banks to realize the decomposition of signal in an iterative way. The decomposition coefficients W1 and W2 are obtained and the specific work flow is shown as in Figure 1.

Flow of signal decomposition with composite Q-factor basis.
In Figure 1, β denotes the high-pass scale factor and α denotes the low-pass one. x(n) denotes the signal to be analyzed, H0(w) denotes the frequency response function of low-pass filter, and H1(w) denotes the high-pass counterpart. LPS denotes the low-pass scale and HPS denotes the high-pass scale. Consider

Suppose the scale factors α and β satisfy

In order to further manifest the effectiveness of separating the high and low resonant components in the signal using the sparse decomposition method with QF basis, a signal, as shown in Figure 2, is constructed. It can be seen from Figure 2 that the simulation signal contains both the high resonant component with persistent oscillation and the low one with transient oscillation. The sparse decomposition with composite QF is carried out, and the high and low resonant components are derived as shown in Figures 3(a) and 3(b), respectively.

Waveform of simulated signal.

High resonant component and low resonant component.
It can be seen from Figure 3 that the high and low resonant components can be effectively separated from the signal using the sparse decomposition method based on QF basis.
3. Basis Pursuit in Sparse Decomposition of Signal
3.1. l2 Norm and l1 Norm
Before further discussion, l2 norm and l1 norm are first defined. For a signal x(n) with the length of N, the l2 norm and l1 norm are, respectively,

3.2. Basis Pursuit
Basis pursuit [13, 14] is usually used for sparse representation of signals. It seeks to obtain the sparsest representation of the signals in the complete (overcomplete) function (basis) set; that is, the smallest amount of bases are used to accurately represent the original signals. In this way, the intrinsic features of the signal can be acquired. In basis pursuit, the norm of representation coefficient is used as a measure of the sparsity of signals. By minimizing l1 norm, the sparse representation of the signals is defined as an extreme problem with constraint. Therefore, sparse representation of the signals is transformed into a linear programming problem. Using the overcomplete dictionary D, the signal s is decomposed, as shown in formula (3). The l1 norm of the coefficient is minimized by formula (4). Consider
3.3. Simulation Signal
To compare the effect of processing on the signal with the l2 norm and l1 norm above and to validate the effect of coefficient optimization by using the sparse decomposition method with basis pursuit, the following sinusoidal signal is simulated:

The time domain of the signal is shown as in Figure 4.

Time domain of simulated signal.
By using the discrete Fourier transform, the coefficient distribution can be obtained as shown in Figure 5.

Distribution of coefficients of discrete Fourier transform.
It can be seen from Figure 5, when the signal is directly processed by discrete Fourier transform, there is only single frequency in the signal; however, the coefficients scatter, which means that there is a frequency leakage, and the frequency resolution is low. In order to improve the frequency resolution, the Fourier transform with the point number that is larger than signal length can be adopted for the processing of signal. In this case, the coefficient obtained from decomposition is not unique, as the number of points is larger than the signal length. Therefore, the norm l2 is used to conduct sparse decomposition on the signal, and the result is shown in Figure 6.

Distribution of coefficient by the processing with norm l2.
It can be seen from Figure 7 that despite the fact that the norm l2 is employed for the sparse decomposition on the signal, there is still a phenomenon of frequency leakage, and the obtained coefficient is not unique. Hence, the norm l1 (sparse decomposition with basis pursuit) is tried to be used to process the signal, and the result is shown in Figure 7.

Distribution of coefficient obtained by basis pursuit processing.
It can be seen from the figure that, after the basis pursuit processing with the norm l1, a unique decomposition coefficient is obtained, and there is no frequency leakage. This proves the validity and superiority of sparse decomposition with basis pursuit. As a result, the norm l1 (basis pursuit) is selected for the processing on signal in the rest of the study.
4. CQFB and PBP in Sparse Decomposition of Signal
4.1. Parallel Basis Pursuit
Suppose the observed signal x is represented as the sum of two component signals x1 and x2. Consider

The goal of dual basis pursuit is to utilize the transform basis function to separate the source signals x1 and x2 from the observed signal x. Suppose the signal components are represented in the following way by using the corresponding transform basis function. Consider

That is, the signal x is represented as

The basis function used is generally overcompleted. Therefore, the transform coefficient is not unique in the sparse representation of the signal. To achieve the sparsest representation, the above-mentioned l2 norm and l1 norm are used for further treatment. The expression involved in the treatment is shown as follows:

Although formula (8) and (9) are similar in form, their solving methods differ greatly. In formula (8), the penalty variable is
4.2. Parallel Basis Pursuit in Sparse Decomposition of Signal
In this study, two basis pursuits are simultaneously used in the processing which is thereby called parallel basis pursuit.
In order to validate the effectiveness of sparse representation method based on dual basis pursuit, it is first applied to extract the periodic components and impact components in the simulated signals. The simulated signal is the superimposition of cosine signal components with the length of 300 and the impact signals, as shown in Figure 8.
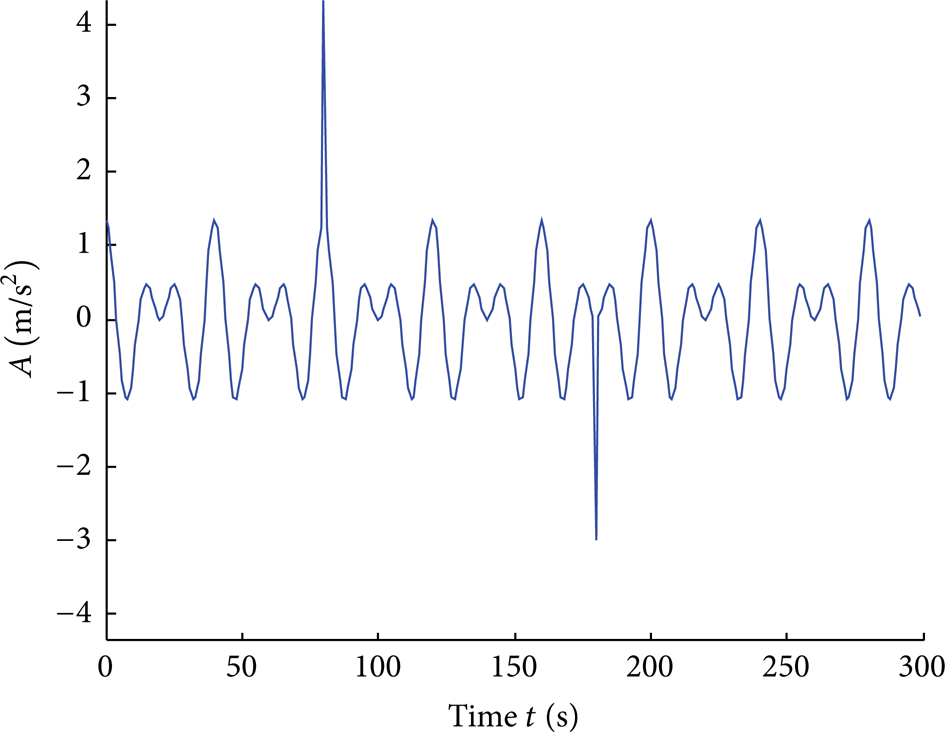
Time domain waveform of the simulated signal.
The sparse decomposition of the signal is performed using the proposed method. The optimal decomposition coefficients are listed in Figure 9.
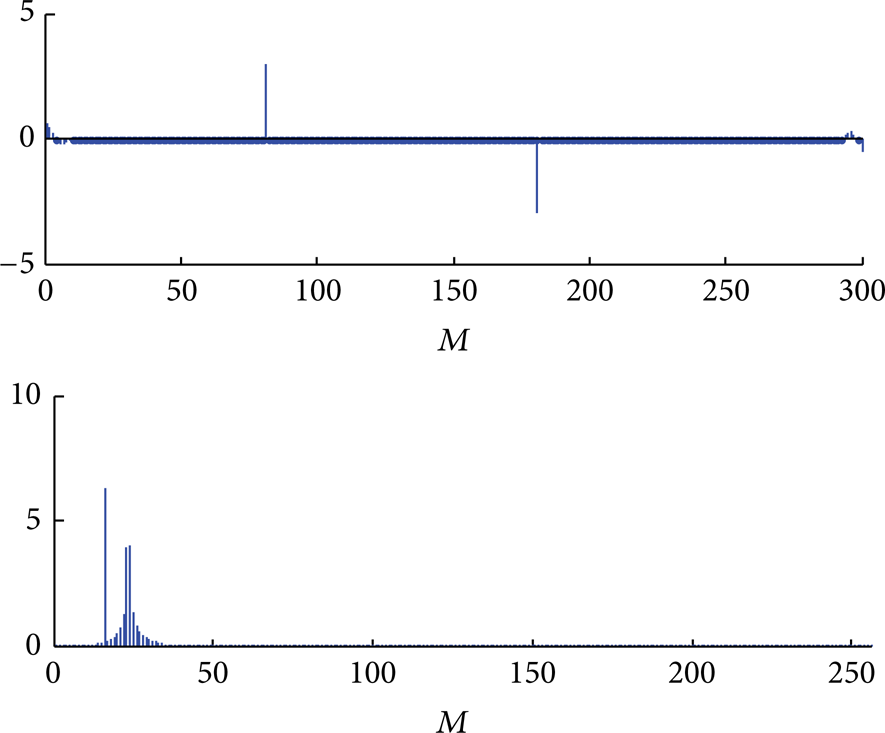
Decomposition coefficient diagram obtained by using the proposed method.
The optimal coefficients are reconstructed to obtain the components 1 and 2 of the signal. See Figure 10.
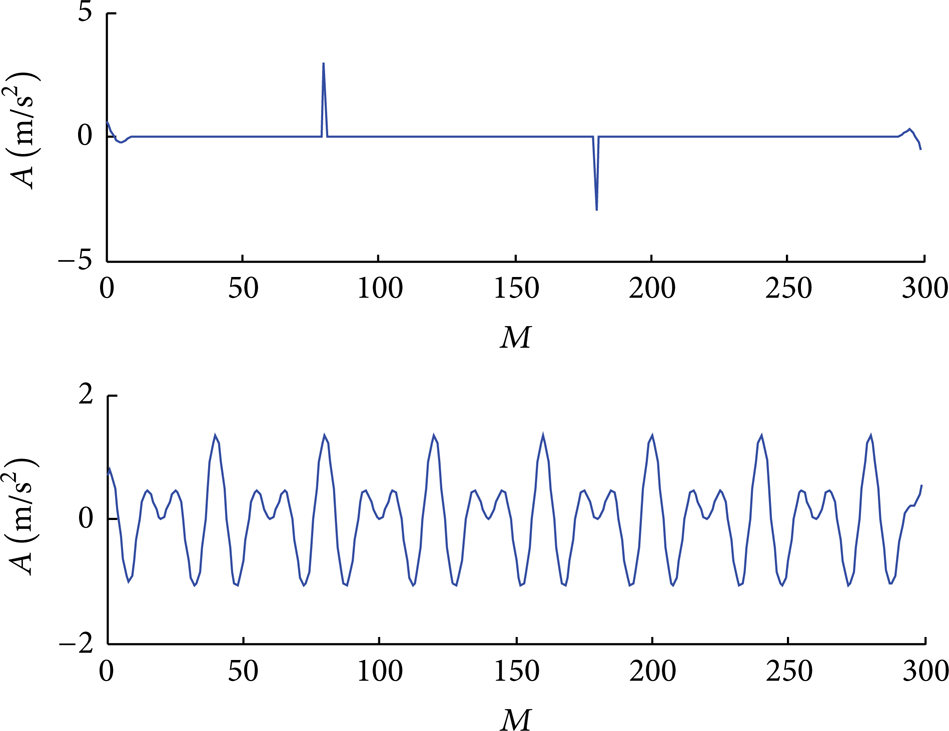
Components separated from the simulated signals.
It can be seen from the figure that the cosine components are separated from the impact components in the simulated signals, and the two components are extracted. Thus, the effectiveness of the algorithm is verified. Since the goal is to extract the impact components in the signals, only the impact components are reconstructed and analyzed in the following section.
4.3. Procedures of Analysis on Local Gear Fault with CQFB and PBP
(1) Different QFs are selected according to the signal of local gear fault. Meanwhile, the decomposition levels corresponding to each QF, J1, and J2, and the redundancy coefficients r1 and r2 are determined.
(2) The libraries of basis function of wavelet transform with different QFs, W1, and W2 are obtained, and the libraries are used to transform the signal of gear fault to acquire the initial transform coefficients c1 and c2.
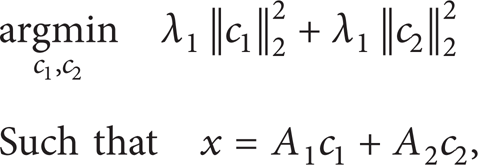
(3) The target function J is established as (10) or (11), and the regularization parameters λ1 and λ2 are determined. Then, the norm l1 is employed to estimate the optimal transform coefficients c1* and c2*.
5. Parameters of the Sparse Decomposition with CQFB and PBP for Diagnosis of Gearbox Faults
5.1. Determination of QF
In order to extract the impact response of fault precisely and to increase the signal-to-noise ratio as possible, the wavelet form of the selected QF basis should match the waveform of fault signal as much as possible. To select the corresponding QF basis efficiently, the wavelet transform with different adjustable QF is applied to the analysis on the experimental signal of gearbox bearing, so as to compare the effect of sparse decomposition and determine the value of QF.
The simulation data of gearbox is analyzed, and the original signal waveform is shown in Figure 11.

Time domain of fault signal.
The further analysis is to apply the wavelet transform method with adjustable values of QF to conduct the sparse decomposition for the signal of outer ring fault (during the analysis, the redundancy coefficient and decomposition level is set as 3 and 7 so that the influence of value of QF can be distinguished).
The adjustable wavelet transform with Q = 3, r = 3, and J = 7 is used for the sparse decomposition, and the energy distribution of each level is obtained as in Figure 12.
The adjustable wavelet transform with Q = 1, r = 3, and J = 7 is used for the sparse decomposition, and the energy distribution of each level is shown as in Figure 13.
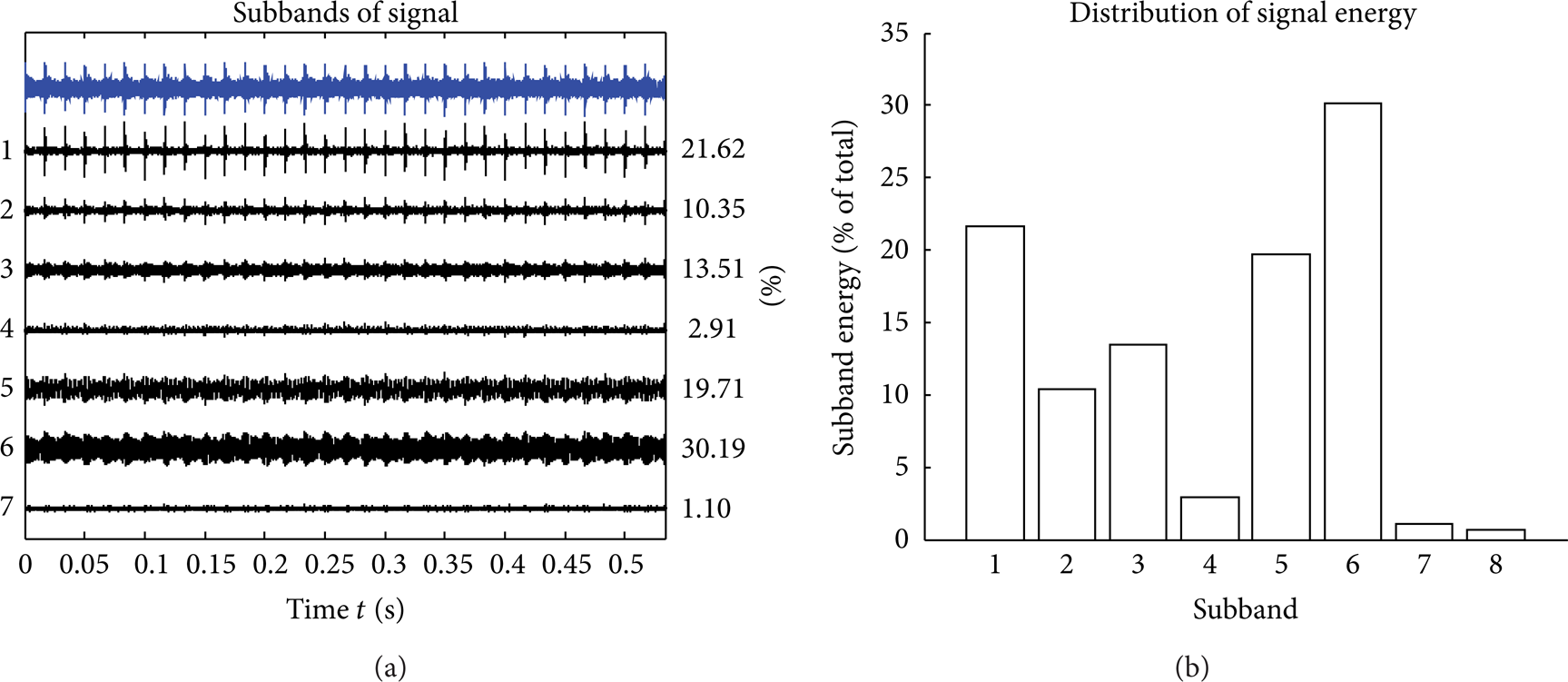
Energy distribution of each level.
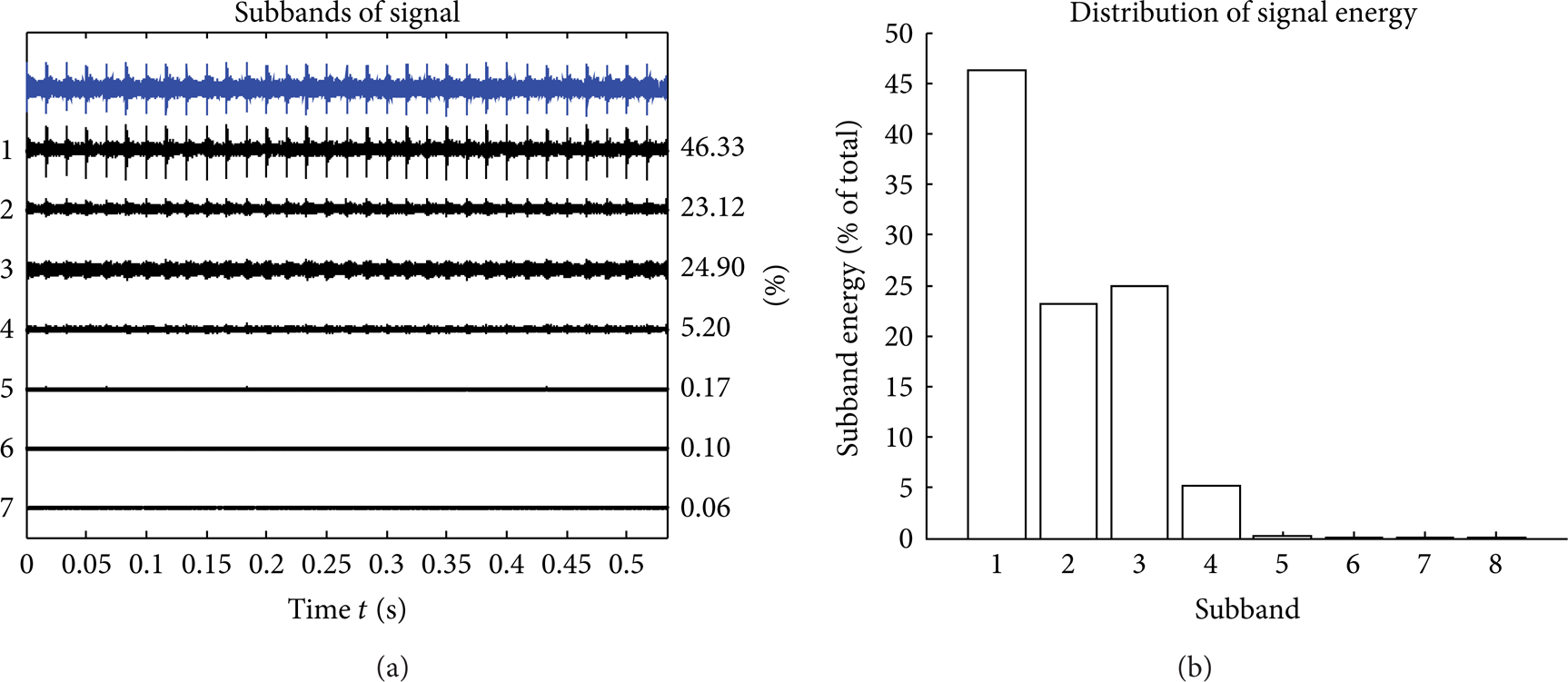
Energy distribution of each level.
It can be seen by comparing Figures 12 and 13 that the fault signal expressed by wavelet basis with Q = 1 is sparser than that with Q = 3. Therefore, the wavelet with Q = 1 is chosen to match the impact component of the fault signal. It can be seen from literature [9] that the wavelet with Q = 3 is generally employed to match the high resonant component of the signal. Hence, Q1 = 3 for the high QF basis and Q2 = 1 for the low QF basis are selected in the following sparse analysis with composite QF basis.
In order to validate that the decomposition of signal with basis pursuit and QF basis can be expressed more sparsely, the basis pursuit is applied to the sparse decomposition with QF basis mentioned above.
The adjustable wavelet transform with Q = 3, r = 3, and J = 7 combined with basis pursuit is used for the sparse decomposition, and the energy distribution of each level is obtained as in Figure 14.
The adjustable wavelet transform with Q = 1, r = 3, and J = 7 combined with basis pursuit is used for the sparse decomposition, and the energy distribution of each level is obtained as in Figure 15.
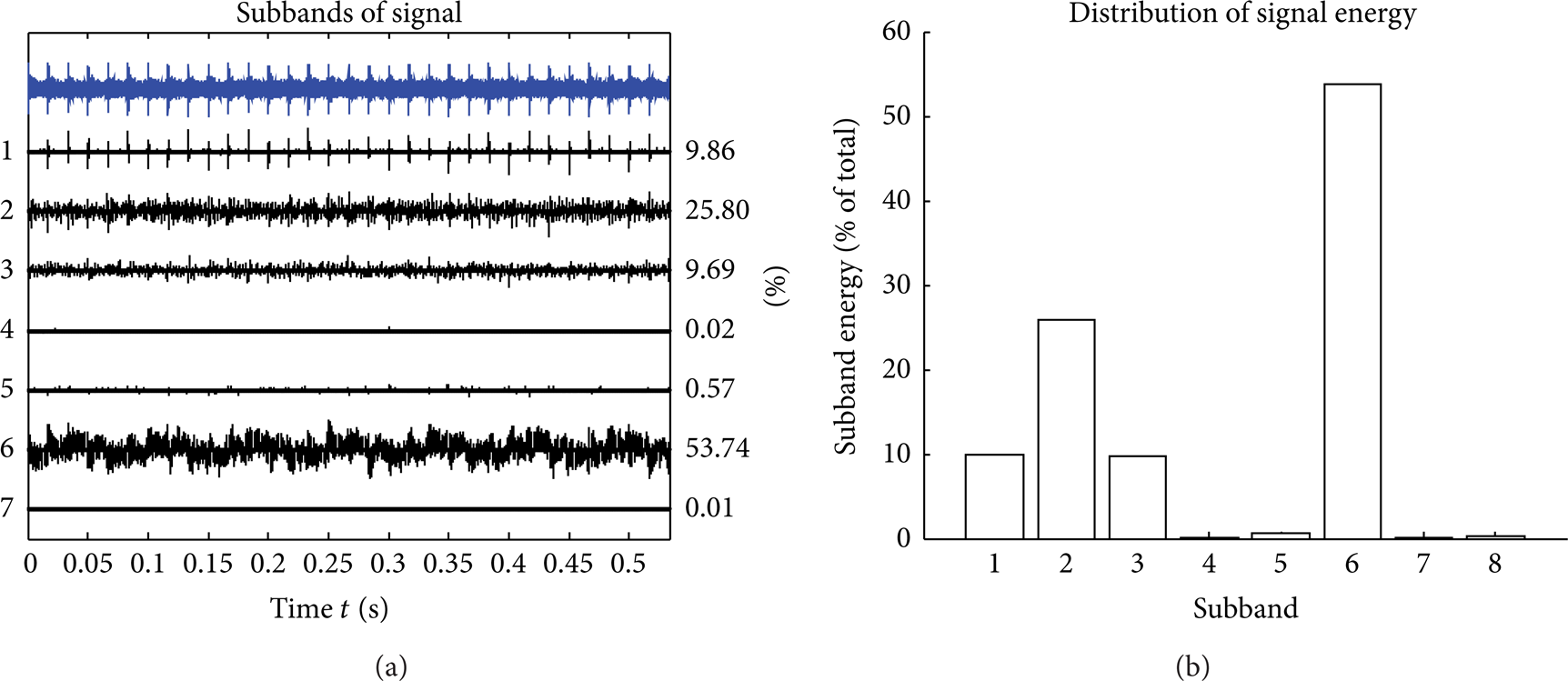
Energy distribution of each level.
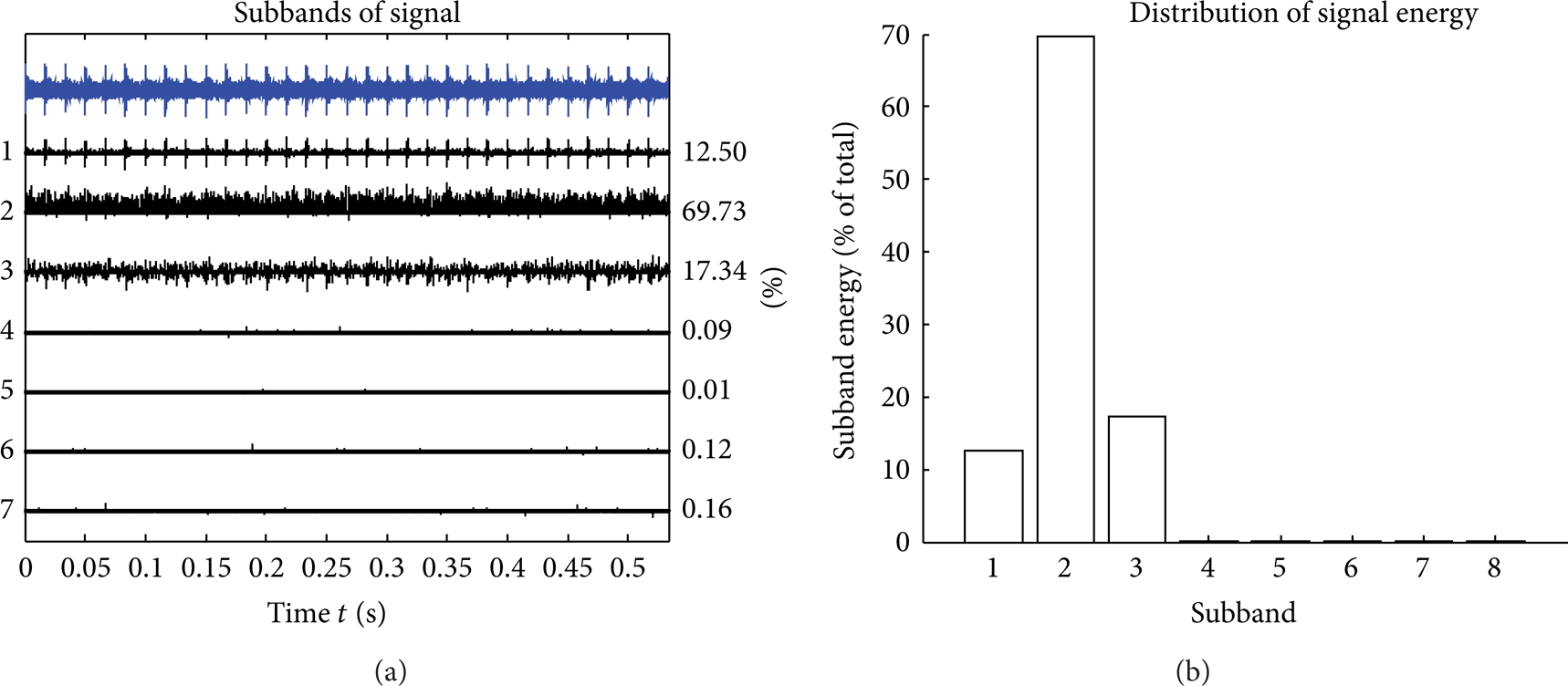
Energy distribution of each level.
It can be seen from Figures 14 and 15 that by combining the basis pursuit with the sparse decomposition with QF basis, the degree of sparsity expressed by the fault signal is increased. Moreover, the expression effect combining basis pursuit with Q = 1 is better than that with Q = 3, which proves the effectiveness of sparse decomposition with QF combining basis pursuit.
5.2. Determination of Redundancy Parameter
It can be seen from literature [9] that the general redundancy factor, r, is between 3 and 4. Hence, it is set as 3 in this study.
5.3. Determination of Decomposition Level
In order to perform a more effective sparse presentation for the signal, there should be a basis function whose center frequency is similar to the oscillation frequency of the component to be extracted in the library of basis function of high and low QFs. It is clear that the greater the J is, the higher the possibility for appropriate center frequency will be. However, the oversized J level will increase the computation burden. However, a greater QF is also needed for a greater decomposition level. Therefore, the levels are set as J1 = 22 and J2 = 7 in this study.
5.4. Determination of Weight Coefficient
Since the values of λ1 and λ2 will influence the energy distribution of the high and low resonant components decomposed. For a given λ2, increasing λ1 will decrease the energy of the component corresponding to λ1. In addition, increasing λ1 and λ2 simultaneously will lead to the increase of residual signal energy. As a result, the values of λ1 and λ2 are both set as 0.5.
6. Simulation Signal Analysis
In [17], a gear vibration signal model containing crack faults is given

The meanings of the parameters can be seen in the original literatures. Gear vibration signal containing crack fault is simulated based on the above formula. Assuming that there are 25 teeth in the gear and the rotation frequency is 60 Hz, the meshing vibration includes three obvious meshing harmonics. Obviously, the meshing frequencies of the three harmonics were 1.5, 3, and 4.5 kHz. Assume that the resonance caused by the impact of the gear crack occurs at 5 kHz and provokes impulse response of the system. The sampling frequency is set as 15360 Hz, and the time domain waveform and spectrum of gear fault signal are shown in Figure 16. As can be seen from Figure 16, meshing frequencies of the three orders (1.5, 3, and 4.5 kHz), their modulation sidebands and the impulse response bands in the vicinity of 5 kHz can be clearly seen.

The time domain waveform diagram and demodulation spectrum of simulation signal.
The proposed method based on CBFP and BP is performed on the simulate signal. The obtained low resonance component is shown in Figure 17. It can be seen that the low resonance component has a good effect on extracting local fault impulse. Using envelope demodulation to low resonance component, the obtained demodulation spectrum is shown in Figure 18. The fault characteristic frequency f = 60 Hz and its harmonics components can be seen from the spectrum and then determine the gear failure, which verifies the proposed method effectiveness.

The low resonance component.
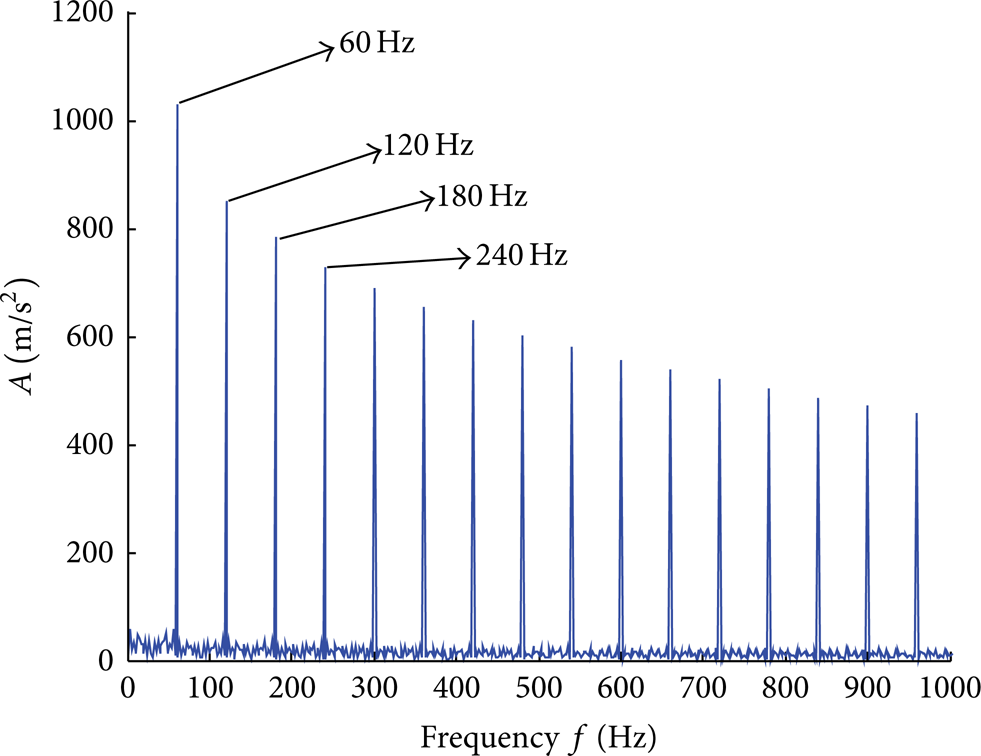
The demodulation spectrum of low resonance component.
In order to better illustrate the effect of the impact impulse signal from the local gear fault extracted by the proposed algorithm with composite Q-factor basis, the kurtosis index and impulse index are introduced, which are defined as (14) and (15). Both of the two indexes can reflect the magnitude of impulse energy in the signal. The larger the eigenvalue is, the more prominent the fault information and the extracted impact signal will be. The calculation result is shown in Table 1, which indicates that the effect of the extracted impact signal by the proposed algorithm is satisfactory.
Comparison between Kurtosis index and impulse index before and after processing.

The kurtosis index is defined as
The impulse index is defined as




where φ
x
denotes the root mean square of the signal and
7. Practical Application
Figure 19 is the driving chain diagram of a gearbox on a high-speed finishing mill of a steel plant. Site monitoring information indicated that modulation information had been reflected by the frequency spectrogram about the vibration data since September 14, 2006. The modulation frequency was the rotation frequency of shaft II on the bevel box of finishing support 22 (30.1 Hz). This phenomenon persisted at a later time.

The gearbox transmission chain chart.
Analysis a set of data collected from on-site, the time domain and frequency spectrum as shown in Figure 20. It is seen that there is no obvious impulse characteristic.
The engineering fault signal time domain waveform diagram and spectrum diagram.
The proposed method based on CBFP and BP is performed on the signal. The obtained low resonance component is shown in Figure 21. It can be seen that the low resonance component has a good effect on extracting local fault impulse.

The low resonance component.
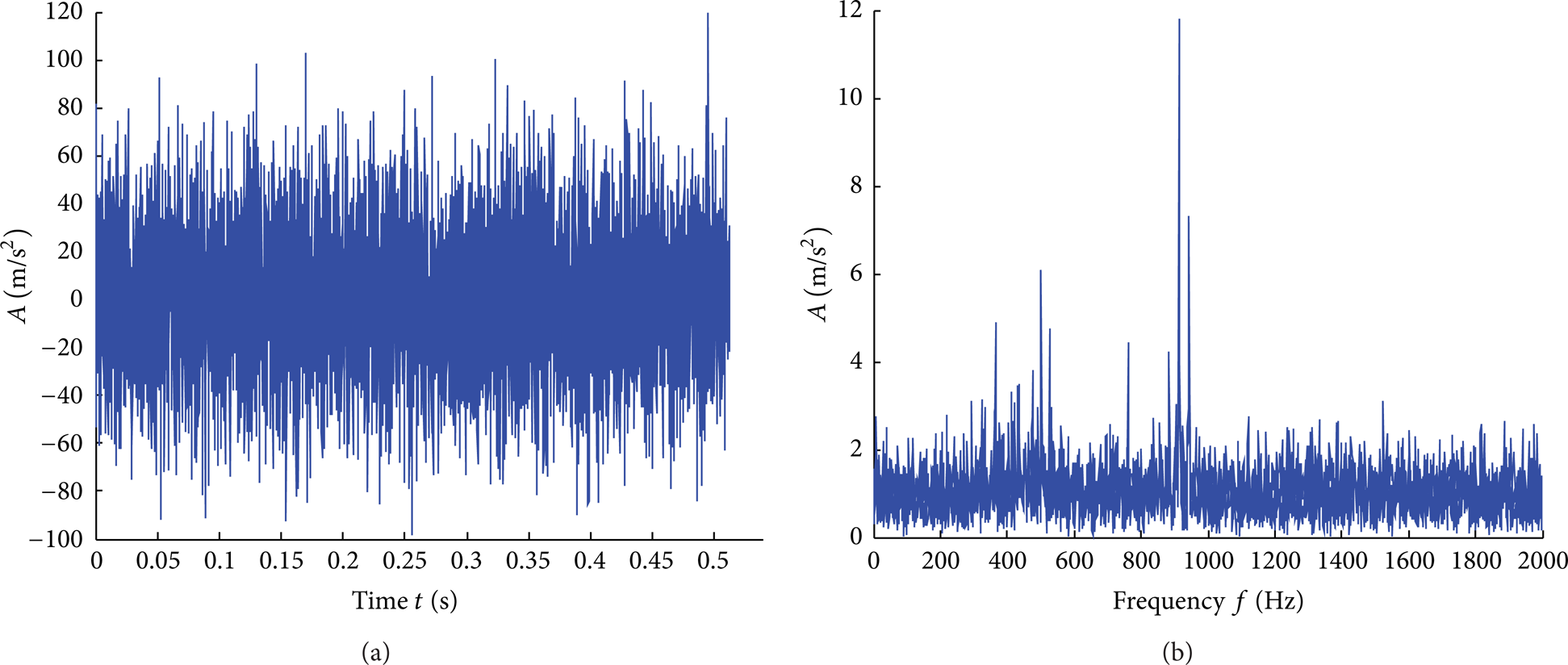
To further illustrate the effect of fault feature extraction, using envelope demodulation to low resonance component, the obtained demodulation spectrum is shown in Figure 22, and f = 29.3 Hz and its harmonic components can be seen from the spectrum (nearly equal to the finishing rolling 22 cone box II shaft rotation frequency), indicating that the gear of axis II should be faulty. For the sake of safety in production, the factory checked the demolished finishing rolling 22 in November, and it was discovered Cone Box II shaft Z5 (31 teeth) gear teeth broken (see Figure 23), which further demonstrates the feasibility and effectiveness of the method.
The demodulation spectrum of low resonance component.

The picture of Z5 local fault gear.
8. Conclusion
(1) A signal processing approach based on composite QF basis and parallel basis pursuit is proposed in this study, targeting the modulation characteristics of nonstationary and multicomponent of the vibration signal from the gear fault and the defect that traditional resonant demodulation approaches are difficult to determine filter parameters. The correct detections of simulated local gear fault and practical faults have proved the effectiveness of the proposed method.
(2) Different from traditional signal decomposition methods based on band division, the demodulation analysis approach based on composite QF basis and parallel basis pursuit can decompose the signal into the high resonant component containing background noise and the low resonant component containing transient impact impulse, according to the differences between the QFs of the transient impact impulse of the local gear fault and other interference components. The transient impact component is effectively extracted. Hence, whether there is a local gear fault or not can be diagnosed.
(3) In this study, high and low QFs are selected according to the practically measured vibration signal of gear fault. Then, the QFs are employed to perform wavelet transform with adjustable QF on the vibration signal of gear, so as to obtain the corresponding transform coefficient. Meanwhile, the algorithm of parallel basis pursuit is adopted for the optimized solution of coefficient to obtain the optimal decomposition coefficient, and the resonant components with high and low QFs in signal are reconstructed. Finally, the low resonant component is subject to demodulation analysis and the diagnosis on gear fault is conducted according to the demodulation spectrum. By algorithm simulation and practical application, it is validated that the proposed method is capable of extracting the impact component from the signal of gear fault effectively and reflecting the features of the fault.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This work is supported by the National Natural Science Foundation of China (Grant nos. 51175007 and 51375037), Beijing Science & Technology Star Plans (2008A014), and Funding Project for Academic Human Resources Development in Institutions of Higher Learning under the Jurisdiction of Beijing Municipality (PHR20110803). Finally, the authors are grateful to the editors and anonymous reviewers for their helpful comments and constructive suggestions.