
Abstract
Wireless sensor networks (WSNs) can be used to monitor long linear structures such as pipelines, rivers, railroads, international borders, and high power transmission cables. In this case a special type of WSN called linear wireless sensor network (LSN) is used. One of the main challenges of using LSN is the reliability of the connections among the nodes. Faults in a few contiguous nodes may cause the creation of holes which will result in dividing the network into multiple disconnected segments. As a result, sensor nodes that are located between holes may not be able to deliver their sensed information which negatively affects the network's sensing coverage. Sensing robots can be used to overcome these faults and enhance the coverage. Sensing robots provide additional sensing coverage and restore the connectivity among disconnected segments. This paper develops a cost-effective design for robot-assisted fault-tolerant LSN. In this design the numbers of fixed sensor nodes and mobile sensing robots are determined such that the required reliability and sensing coverage levels are maintained while the total cost is minimized. The paper covers both uniformly and randomly deployed sensors LSNs.
1. Introduction
One of the important applications of LSN [1] is monitoring pipeline infrastructures such as gas, water, and oil pipelines [2, 3]. Such infrastructures could extend for thousands of meters in varying environments many of which are remote and usually unforgiving locations such as underwater [4]. Using LSN to monitor and in some cases control some aspects of these infrastructures has become important. Having a fault-tolerant LSN that would monitor and relay condition changes and environmental properties around the infrastructure allows the operators and management to make accurate decisions regarding maintenance, adjustments, replacements, and failure recovery activities.
Other applications of LSN are railroad/subway monitoring, AC power line monitoring, river monitoring, and border monitoring [1]. LSNs used for monitoring these structures consist of a number of sensor nodes. Each sensor node is equipped with sensing elements, a battery, a wireless communication device, a low-capability processor, a small memory, and a small storage. The sensors are lined through the structure to provide three main functions: sensing, information relay, and information filtering. The sensing function is to observe for any interesting changes in or around the monitored structure. The information relay helps forward observed data to the main station using multihop communication. The filtering function filters out and aggregates multiple pieces of sensed data into smaller messages. This will optimize communication, processing, and routing as well as the power needs thus extending the life of the network.
There are several reasons why new frameworks, protocols, and architectures are needed for different categories of LSNs as detailed in [1]. Such reasons include
One of the main challenges facing LSN is losing connectivity in the network [12]. This is due to faults in neighboring and consecutive nodes. Nodes can fail due to battery exhaustion, hardware failures, and natural or intentional damages. These consecutive faulty nodes form holes which may cause the LSN to be divided into multiple disconnected segments. Some of these segments will become isolated; thus, they cannot transfer their sensed data to the main station. As a result the isolated segments will not provide any sensing coverage. Connectivity and coverage are generally considered very important issues in wireless sensor networks [13–16] and this issue is more challenging in LSNs due to its unique characteristic of limited availability of connection paths that can be used to overcome faults.
In this paper, we investigate the use of sensing robots (SRs) to enhance the reliability of LSNs. We develop and validate an analytical model to find the number of SRs needed to maintain highly reliable and fault-tolerant LSNs. In addition, this paper develops a methodology for cost-effective design. In this design the numbers of fixed sensor nodes and mobile sensing robots are determined such that the required reliability and sensing coverage levels are maintained while the total cost is minimized.
Our model is suitable for both uniformly deployed LSNs and randomly deployed LSNs. In uniform LSNs, the distances between any two neighboring nodes are equal, while in random LSNs, these distances are not. A uniform deployment may occur on pipeline infrastructures or power lines where sensors are distributed at equal distance from each other over the pipes or power towers. An example of random deployment occurs when sensors are dropped on site using an airplane or a moving vehicle [17] along a path to monitor a river bank [18] or a border [19]. We previously investigated different types of LSN applications and deployments in [1].
In the rest of this paper we cover the related work in Section 2. Section 3 provides background information about LSNs. The reliability and coverage issues of LSNs are covered in Section 4. In Section 5, we discuss using SRs and in Section 6 we develop a model to estimate the number of SRs needed for high reliability in uniform LSNs. A cost-effective design that combines both fixed and sensing robots in uniform LSNs is discussed in Section 7, while Section 8 provides examples and experiments. We extend our framework for randomly deployed LSNs in Section 9. In Section 10 we conclude the paper.
2. Related Work
There is some effort to utilize robots for enhancing deployments, operations, maintenance, and the life span of WSNs. Mobile robots were investigated for WSN deployments in normal situations [20] and in disaster situations [21]. Fletcher et al. [22] and Houaidia et al. [23] developed some robot-assisted relocation strategies of sensors for coverage enhancements for randomly deployed WSNs. Tong et al. [24] developed a strategy for reclaiming nodes with low or no power supply, replacing them with fully charged ones and bringing the reclaimed nodes back to an energy station for recharging. Mei et al. [25] developed and analyzed some algorithms to determine which best robot to replace a faulty node in large-scale static sensor networks. Some research effort was also dedicated for developing mechanisms for WSN localizations using mobile robots [26, 27]. These studies were done mainly for two-dimensional WSNs that are deployed at random.
Unlike in two-dimensional WSN in which sinks can be reached through multiple existing paths which can be utilized to enhance the reliability, very few alternate paths are usually available in LSNs [28]. Few nodes faults can significantly drop the network connectivity and coverage. We proposed to use mobile sensors to enhance the coverage in LSNs [29]. In this paper, we develop a framework for a cost-effective design for robot-assisted fault-tolerant LSN. This framework shows that using mobile sensor robots can not only enhance the coverage of LSNs but also it can reduce the cost on some configuration cases.
3. Linear Wireless Sensor Networks (LSNs)
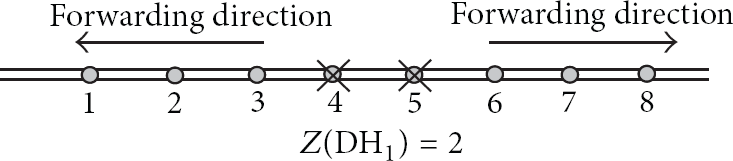
Wireless sensor nodes can be installed on a linear structure to observe the status of the structure and its surrounding environment. These nodes can be deployed uniformly or randomly to form an LSN. In both types of LSNs, the nodes are distributed to cover the monitored structure. Sensing nodes usually have limited transmission compatibilities where each node can communicate with only a few neighboring nodes [3]. Nodes collaborate among themselves in both sensing and communication functions. Multihop communication is used to transfer the sensed and control data across the linear structure and to/from the main control station. Wireless networks can solve some of the reliability problems of current wired networks technologies that are used to monitor linear structures [2]. For example, WSNs can still function even when some nodes are disabled. Faults in sensor nodes can be easily tolerated using other available nodes to cover the faulty ones. Using dense LSNs with a high number of nodes and/or using wide wireless transmission ranges, the network can maintain connectivity and the sensed and control data can be transmitted through the network to its destination even with the existence of some node faults. For example, in the uniform LSN in Figure 1, each node can communicate with two nodes to the left and two nodes to the right. If for example nodes 3 and 5 are damaged, node 4 can still send its sensed data through node 2 or 6. The maximum number of neighboring nodes that each node can communicate with each side can be defined as a maximum jump factor (MJF).

Reliability in a dense uniform LSN.
For example, MJF in Figure 1 is 2; thus, node 4 can communicate with a maximum of two nodes on each side.
Each senor node on a linear structure is usually equipped with a transceiver, a processor, a battery, memory, and small storage in addition to one or more sensing elements. Power consumption is critical to the life span of LSNs. Linear structures need to be monitored throughout their life span which could extend to tens of years. Therefore, the associated LSNs should also be long lived. Unlike wired networks where the power is not at all a constraint as the wires deliver power to the different sensor nodes, LSN designers have to consider power as one of the main constraints in the wireless system. Power in a sensing node is consumed by every element on it. A transceiver consumes power waiting for a signal and when transmitting or receiving data. Sensing elements also consume power and the processor as well. Careful scheduling of these resources is needed to optimize power consumption. Although increasing transmission range offers better communication reliability, the nodes will consume more energy. A dynamic configuration for the wireless transmission range can provide better power management. An example of this configuration of a uniform LSN is in Figure 2. Here, nodes 3 and 5 have failed. Therefore, the wireless range for node 4 is increased to reach nodes 2 and 6, while other nodes use a smaller transmission range to reduce the power consumption. The sensed data is transferred through the line to the main station in either direction or both if both directions are connected to the main station. Connecting both directions to the main station will double the communication reliability [3, 4].

Automatic wireless range configuration.
4. Faults and Coverage in LSN
Sensor nodes are usually initially distributed to cover the whole linear structure in terms of both sensing and communication coverage. A node senses interesting events and this observation is reported to the main station using multihop communication. Sensors in LSN nodes can have different sensing range capabilities. In a uniform LSN where nodes are distributed at uniform distances, let us define the distance between two neighboring nodes i and
This coverage is reduced if there are some faulty nodes. However, if NSR is larger than d (one distance unit), then some node faults can be easily tolerated without reducing the percentage of the sensing coverage. For example, if NSR is 2 distance units. This means that the area between two neighboring nodes i and
LSN is usually designed to provide a full sensing coverage. However, after some time, there will be some faults among the nodes. Let us consider that we have a one-segment network with homogeneous nodes. Let us also assume that there is a uniform distance between each two nodes. In addition, nodes have a specific MJF. Let us define a term Hole (H) as the number of contiguous faulty nodes in the LSN. Each hole can be of size of one or more nodes. For example, in Figure 3, we have two holes:

Two holes in the LSN.
A special type of hole is a disconnecting hole (DH), which disconnects the network into two segments that cannot directly communicate with each other using an extended wireless range. In other words, the size of a DH is larger than or equal to the MJF used for the nodes in the LSN,
There are different types of faults in a one-segment LSN with homogenous nodes distributed uniformly over the linear structure. Assume that both ends of the LSN are connected to the main station. The faults have different impacts on the communication and sensing coverage. For example, if there are multiple holes that are all not disconnecting holes, then the LSN will function normally. Although there will be some holes with sizes smaller than MJF, any sensed information can be transferred to the main station through the left or right side of the network. Any hole can be jumped over by extending the wireless range of the node that forwards the sensed data to the MJF to reach the next functioning node. The sensing coverage in each hole may or may not be affected. This depends on the size of the hole and NSR. Let

For example, if

LSN with
The sensing coverage of LSN can be calculated using (1) and (2). In the example shown in Figure 5, the size of DH is 3, while NSR is 4; then the healthy nodes 6 and 10 cover the whole area of DH. In another example (see Figure 6) the size of DH is 5, while NSR is 4. In this case, there are 2 distance units that are not covered by both healthy nodes 6 and 12.

LSN with

LSN with
In another fault case, there are multiple holes; only two of them are disconnecting holes. In this case, the LSN will be divided into three segments. Let the DHs be DH1 and DH2. The first segment is before DH1, the second segment is between DH1 and DH2, and the third segment is after DH2 as shown in Figure 7. In this figure, DH1 is from node 5 to node 6 while DH2 is from node 11 to node 13. The first segment covers nodes 1 through 4, the second covers nodes 7 through 10, and the third covers nodes 14 through 17. All nodes in the first segment can communicate with the main station in the right-to-left direction, while all nodes in the third segment can communicate with the main station in the left-to-right direction. However, healthy nodes in the second segment cannot communicate with the main station at all.

LSN with
In another case, there are multiple holes with more than two disconnecting holes. Here we assume that there are k DHs: DH1 through
5. Using Sensing Robots
Mobile sensing robots (SR) can be used to enhance the communication and sensing coverage in LSNs. SRs are equipped with all the components a sensing node has including sensors, processor, memory, storage, and wireless transmitter/receiver in addition to some specialized robot devices. Each SR can move linearly over the LSN to cover a DH and provide sensing and communication coverage as shown in Figure 8. When placed at a DH, the SR provides connectivity in the disconnected segments in addition to sensing coverage. If MJF is 2, then one SR can cover a DH with size up to 3 nodes. Generally each SR can cover a DH with a maximum size of (

LSN with
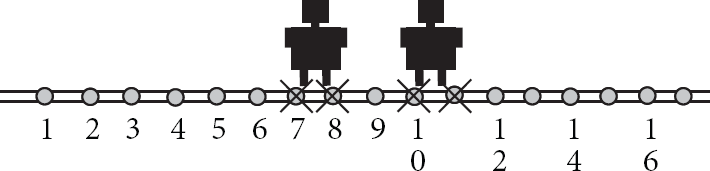
Multiple SRs can be distributed across the linear structure to provide recovery from any DHs. They can also be reallocated to different locations as new DHs occur to maintain best possible sensing coverage. To understand the importance of SR reallocations assume that the current status of the LSN is as shown in Figure 8. MJF is 2 while only two SRs are available and they are already used to cover two existing DHs as shown in Figure 8. Using these two SRs, the whole LSN is covered. Now assume that after some time, two more DHs occurred in the LSN as shown in Figure 9, thus making four DHs. The new DHs will reduce the coverage significantly as all the area (14 nodes) from node 2 to 15 will be uncovered. The assigned SRs are reallocated to cover DH1 and DH4 instead of DH2 and DH3. The result is shown in Figure 9, where the reallocation resulted in leaving only 5 nodes from 7 to 11 without coverage compared to 14 nodes earlier.

Reallocation of SRs for better coverage.
Let A be the number of available SRs and let R be the number of needed SRs to cover all DHs. The best strategy to use for SR reallocation in case we need more SRs than available (i.e.,
6. Estimating the Number of SRs
For good network coverage, it is important to know the number of SRs needed to cover possible DHs in the LSN. In this section, we develop an analytical model that provides a way to estimate the number of SRs needed to maintain high LSN coverage. Given an LSN with n uniformly distributed nodes and a specific MJF, each node has a chance to independently fail with probability f within a certain period of time T. T can be the time to a periodic full maintenance or the time that the LSN is needed to live. To know the number of needed SRs (R), we first need to know the expected number of holes that may occur and their sizes within time T. Knowing the number and sizes of the holes is essential to estimate the number of SRs to cover these holes. To know about the expected holes, let us first find the probability equation that a healthy node in the LSN has a hole directly in front of it with exactly size i. We name this equation



Here, as the LSN size increases the chance to have more holes in the LSN also increases. Now, let


For any realistic value for f, it is usually a very low probability to have holes with sizes larger than a certain number in an LSN. Therefore, we can consider that we have a variable v that represents the maximum size of possible holes. Let

To validate the above equations, a number of simulation experiments were conducted covering different LSN configurations as listed in Table 1. These LSN configurations have different number of nodes (n), node fault rate (f), maximum jump factor (MJF), and node sensing range (NSR). The table also lists the expected numbers of needed SRs for all LSN configurations. These numbers are calculated using (9).
Different LSN configurations.
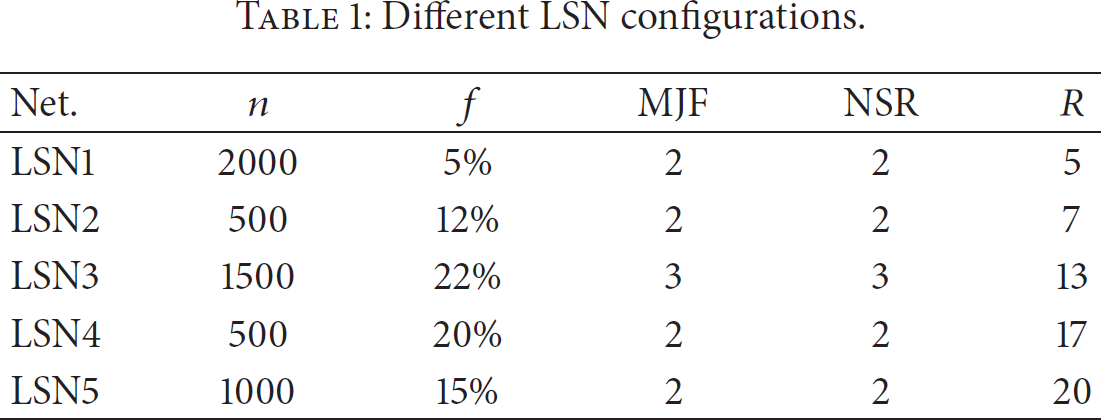
A set of simulation experiments were conducted for the LSNs with the configurations listed in Table 1. The experiments covered a setup without the reallocation strategy (WRS) with R replaced sensor nodes, where R is calculated from (9) and listed in Table 1. In addition, the experiments were conducted to find the impact of using different numbers of SRs on the coverage using,
For each simulation experiment, 10,000 different faulty LSN cases were generated randomly to cover different types of faults for each situation. The average of these 10,000 cases was calculated as an expected result for each experiment. The results are shown in Figure 10. As we can see, using R SRs ensures high coverage for all selected network configurations. The expected coverage is between 97% and 98% in all cases. This is generally a good coverage range. On the other hand, the expected coverage results of using less than R SRs significantly dropped as we use less SRs. At the same time, using more SRs, more than R, will slightly enhance the expected coverage of the LSN. These results validate the developed equations.
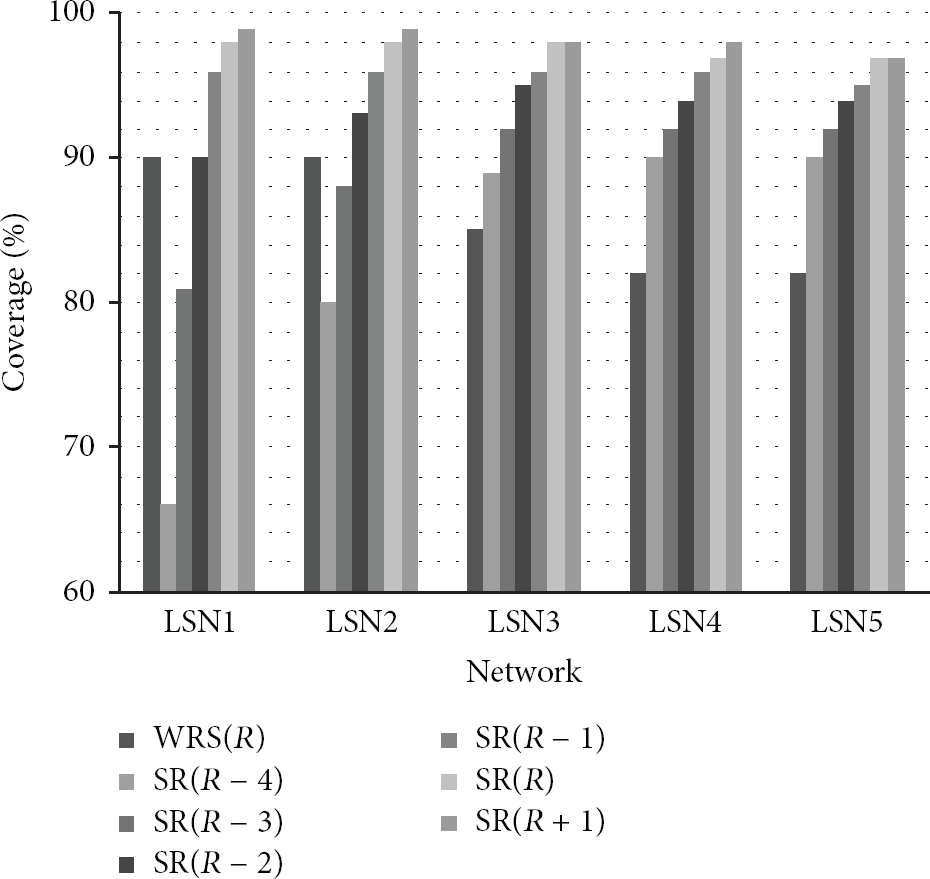
Expected coverage under different cases.
The coverage percentage range of 97% to 98% when using R SRs is obtained due to the existence of holes that are not disconnecting holes in the network. These holes will only slightly reduce the coverage. However, the SRs will cover most of the disconnecting holes; thus, the coverage will not drop significantly.
7. Cost Effective Design
In the previous section we developed an analytical model to find the numbers of SRs needed to maintain high coverage for LSNs. In the section, we develop a technique to design cost effective LSNs that combine both fixed sensor nodes and SRs. Let us assume that a linear area needs to be monitored with a LSN. For this LSN, a high coverage needs to be maintained for a time period T. T can be the time to a periodic full maintenance or the time that the LSN is needed to live. The LSN has a combination of fixed sensors and SRs. Let us assume that each fixed node has a chance to independently fail with probability f within the period T and SRs are designed to be highly reliable and of high quality. Let us assume that the cost of each fixed sensor node is one unit and the cost of each SR is Q units. In other words, the cost of each SR is Q times more than the cost of a fixed sensor. This is mainly due to the mobility feature of the SRs and the additional costs of needed functional units. The objective here is to find how many fixed sensor nodes and SRs are needed to maintain high coverage during the period T such that the total cost of the LSN is minimized.
To find the needed numbers of fixed sensor nodes (n) and SRs (R), we need to first find the minimum number of fixed nodes needed to have full connectivity in the LSN (
For full coverage we can use LSNs with 

We can calculate the total cost of the different options from 1 to j for MJF where j is the minimum MJF value to have a full LSN coverage during the period T using only fixed sensor nodes without using any SRs. These different deigns may have
8. Example and Experiments
As an example, assume that fixed sensor nodes will be used to form a LSN. Each node has f as 0.25 during a period T. We assume that f is high since T is a long period. Assume that
Total costs of different LSN solution designs.

As we can see the best option when the total cost of each SR is 10 times the cost of a fixed sensor node, then the best cost effective design is to use 400 fixed sensor nodes and 20 SRs. In this case, MJF will be 2. The best option is when the total cost of each SR is 20 times the cost of a fixed sensor node; then the best cost effective design is to use 600 fixed nodes and 8 SRs. The best option is when the total cost of each SR is 50 times the cost of a fixed sensor node; then the best cost effective design is to use 800 fixed nodes and 3 SRs. These best cost effective designs in all three different fixed nodes and SR cost factor will provide high levels of coverage and some cost saving comparing to use more fixed sensor nodes to maintain the high coverage. The cost saving is around 50%, 36.7%, and 20.8% for
To validate the different LSN designs listed in Table 2, two sets of simulation experiments were conducted. The experiments simulate coverage, where each LSN is initially deployed to provide full coverage. However, after some time, some faults will occur in some nodes thus reducing the coverage in the LSN. Here the LSN needs maintenance to regain full coverage again. The simulations were developed using a Java program, where experimental situations were created with 10,000 LSNs that were generated randomly to have different types of faults for each situation. The results are the averages measured from all these faulty LSNs. The first set was to check if all possible designs will provide high coverage with the existence of faults. The results are shown in Figure 11, where all solutions maintain high coverage with the existence of faults. Therefore, any design can be used; however, these designs have different costs.

Expected Coverage of different LSN designs.
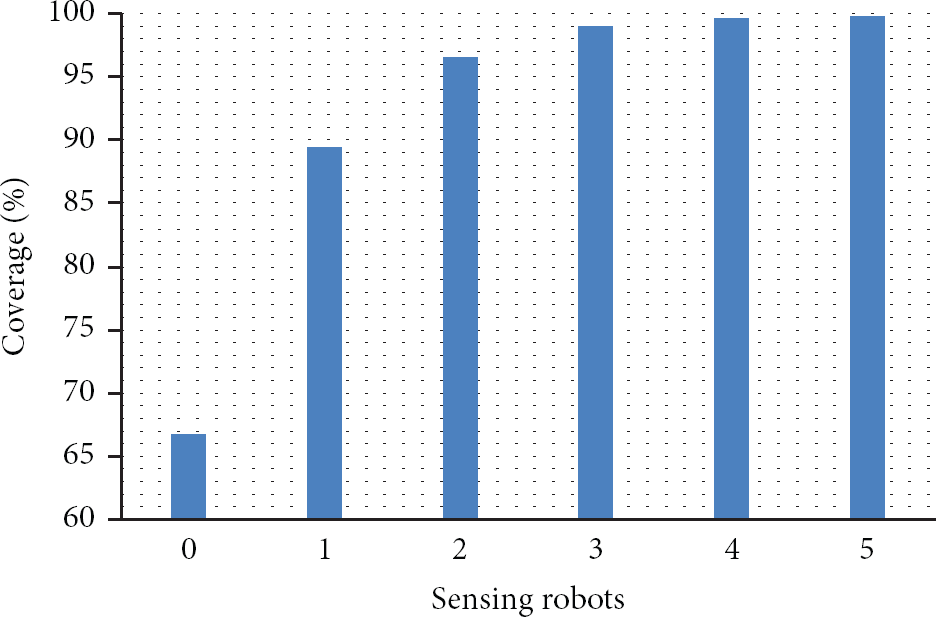
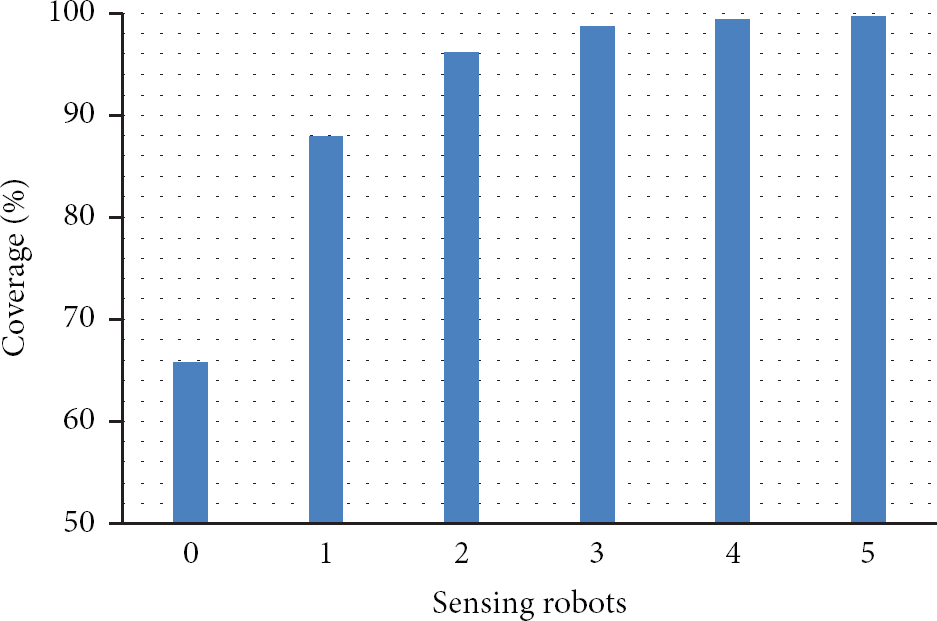
The second set was conducted to compare using the cost effective design with varying numbers of SRs. The main purpose of this experiment is to find the impact of using different numbers of SRs on the coverage and to validate whether using the calculated R SRs will be enough to maintain high coverage. In other words, will using less than R SRs decrease the expected coverage while using more than R SRs not increase the expected coverage significantly. The experiments were conducted for
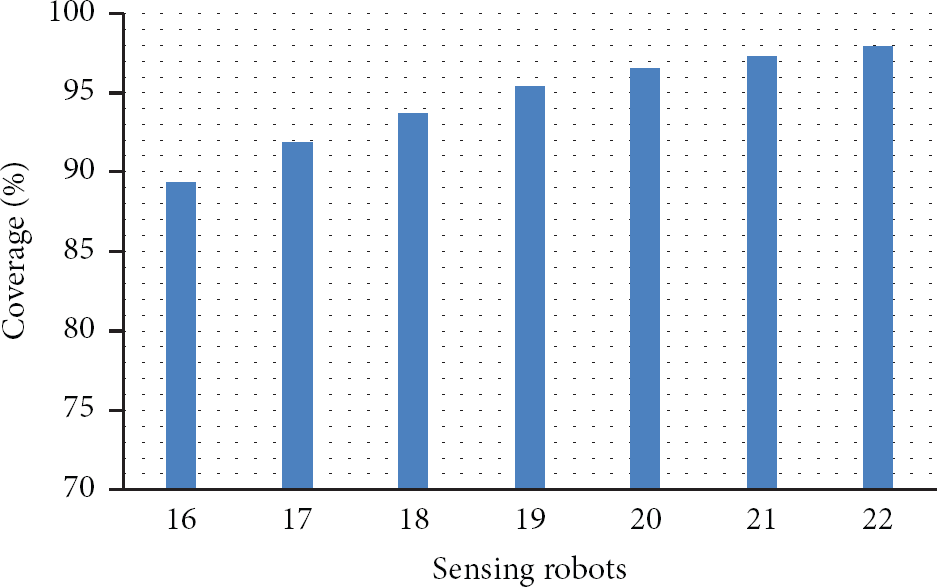
Expected coverage for

Expected coverage for
Expected coverage for
9. Randomly Deployed LSN
In the previous sections we mainly developed and validated the cost-effective design framework for robot-assisted fault-tolerant uniformly deployed LSNs. However, sensor nodes for LSN can be deployed in a random fashion in some practical scenarios. One example of such a deployment is when the sensor nodes are dropped from an aircraft, ground vehicle, or underwater vehicle along a given path [17]. One example of this deployment can be used to form an LSN that monitors the area surrounding a long pipeline in unattended area to provide some sort of fast monitoring to prevent some external intentional and nonintentional threats [4]. The deployed sensors can report, for example, about any movement, sound, or hazards around the area of the pipeline for fast safety actions including sending security and emergency vehicles to the area [3].
Another example is when an autonomous underwater vehicle drops underwater sensor nodes for sea-boarder monitoring [30]. In these examples, although the aim is to deploy sensor nodes uniformly to cover the complete linear structure, the nodes are most likely deployed randomly with varying distances between each two neighboring nodes. Actual landing locations of sensor nodes may deviate from their targeted locations because of environmental factors such as winds or waves or geographic factors such as slopes and valleys. In this type of deployment, some sensor nodes may be damaged. As a result the network connectivity and sensing coverage capabilities may be significantly impacted. In this section we customize the framework to include randomly deployed LSNs. Two possible solutions for this problem are either to deploy more redundant fixed sensor nodes or to use a combination of fixed sensor nodes and reliable mobile sensor robots as we propose in this paper. In the latter case, a cost-effective design is needed to determine the number of fixed sensor nodes and mobile sensor robots needed in the network.
Assume that there is a plan to deploy a node for each 
Now, to make MJF equal to 2, we need to have 3 nodes placed in the range of W meters. These 3 nodes can be deployed with some random errors of the range of 

As an example, let us consider that there is a need for a LSN to monitor an area of length 75,000 meters. The wireless communication range, W, of the nodes is 400 meters while f is 0.25. The error in the deployment is in the range of ±19 meters. The planned deployment distance and the number of needed sensors for different MJF configurations are shown in Table 3. The needed number of SRs, R, to maintain high reliability can be found from (9) while total cost can be found by

Different randomly deployed LSN configurations.

As we can see from Table 3, the most cost-effective configuration is when we use the MJF of 3. In this case, we need to use 625 fixed nodes that are placed each 120 meters and 8 SRs. This configuration only costs 785 units.
To validate the result, a simulation experiment was conducted to measure the sensing coverage of the most cost-effective configuration LSN with the MJF of 3. In this experiment, we measure the coverage with varying numbers of available SRs including less and more than the number needed. While the needed SRs are 8 based on Table 3, we experimented with numbers from 1 SR to 10 SRs. The simulation was developed using a Java program, where experimental situations were created with 10,000 LSNs that were generated randomly to have different types of faults and node deployment distances for each situation. The final results are the averages measured from all these LSNs. The sensor nodes in the experiments were distributed randomly using Gaussian distribution. This distribution represents a good model for generating random deployment WSN and used in many research papers in the field [17, 31–33].
The result is shown in Figure 15, where we see that using 8 SRs ensures high coverage. The expected coverage is around 97%, which is generally a good percentage. On the other hand, the expected coverage using less than 8 SRs significantly drops. At the same time, using more SRs than 8 will slightly enhance the expected coverage of the LSN. This result validates the developed model.

Expected coverage for randomly deployed LSN, with
Two more sets of experiments were conducted to measure the impact of the number of SRs in the coverage on two LSN configurations with the MJF of 2 and with the MJF of 4. Both configurations provide good coverage if the right numbers of SRs are used, 21 and 3, respectively. However, both solutions cost more than the LSN with the MJF of 3. The results are shown in Figures 16 and 17. As the two figures show, using less than the calculated SRs can significantly drop the expected coverage, while using more than the calculated SRs will slightly enhance the coverage.

Expected coverage for randomly deployed LSN, with
Expected coverage for randomly deployed LSN, with
10. Conclusion
This paper discussed the use of sensing robots to create fault-tolerant LSNs by enhancing the communication and coverage reliability of these networks. A reallocation strategy of the sensing robots was developed to improve the coverage caused by node faults. An analytical model was developed to estimate the number of sensing robots needed to provide high coverage. In addition, a cost-effective design for fault-tolerant LSN with fixed sensors and sensing robots was developed for both uniformly and randomly deployed LSNs. The developed model provides an effective solution for enhancing the coverage in the presence of faults. This makes the proposed model suitable for critical applications for infrastructures located in difficult areas or harsh terrains that cannot be easily reached such as underwater pipelines that extend for hundreds of miles at depths that could exceed hundreds of meters. Incorporating the model at the LSN design stage will allow the LSN designers to have an accurate estimate of the number of nodes and SRs needed to maintain a high coverage during the lifespan of the LSN while minimizing the total cost.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgment
This work is supported in part by UAEU Research Grant no. 3IT008.