
Abstract
Feedback contents of previous information feedback strategies in advanced traveler information systems are almost real-time traffic information. Compared with real-time information, prediction traffic information obtained by a reliable and effective prediction algorithm has many undisputable advantages. In prediction information environment, a traveler is prone to making a more rational route-choice. For these considerations, a mean velocity prediction information feedback strategy (MVPFS) is presented. The approach adopts the autoregressive-integrated moving average model (ARIMA) to forecast short-term traffic flow. Furthermore, prediction results of mean velocity are taken as feedback contents and displayed on a variable message sign to guide travelers' route-choice. Meanwhile, discrete choice model (Logit model) is selected to imitate more appropriately travelers' route-choice behavior. In order to investigate the performance of MVPFS, a cellular automaton model with ARIMA is adopted to simulate a two-route scenario. The simulation shows that such innovative prediction feedback strategy is feasible and efficient. Even more importantly, this study demonstrates the excellence of prediction feedback ideology.
1. Introduction
Advanced Traveler Information Systems (ATIS) are designed to provide real-time information regarding the traffic conditions for travelers. Generally, under the assistance of ATIS, travelers could make better route-choices. Without real-time information, travelers' route-choices are primarily based on experiential knowledge that is derived from learning of past experiences. As fundamental part of ATIS, the information feedback strategies have attracted great interest of transportation scholars [1–4]. The aim of the information feedback strategies is to minimize individual road users' travel times and improve road service efficiency. Although people are full of expectation of ATIS, traffic condition would become more serious if an inappropriate information feedback strategy were to be adopted. It is still an essential task to find out an optimal and efficient information feedback strategy under ATIS [5–7].
Accordingly, several conventional information feedback strategies have been proposed in recent years. These strategies mainly consist of three types: travel time feedback strategy (TTFS) [8], mean velocity feedback strategy (MVFS) [9], and congestion coefficient feedback strategy (CCFS) [10]. It has been proven that MVFS is more effective than TTFS, which is a lag effect approach and is impossible to provide travelers with the current situation of each route. In the meantime, CCFS is more effective than MVFS, the core of which is to define the congestion coefficient creatively [11]. Regardless of the fact that CCFS promotes the efficiency of the road networks, it needs higher detection precision and more computing resources of ATIS to compute the congestion coefficient. Based on above three strategies, Dong et al. [12, 13] put forward to a corresponding angle feedback strategy (CAFS), and a vehicle number feedback strategy (VNFS). Chen et al. [14–16] put forward to a vehicle's length feedback strategy (VLFS), time flux feedback strategy (TFFS), and an exponential function feedback strategy (EFFS). Tobita and Nagatani [17] put forward to a tour-time feedback strategy. These information feedback strategies adopted various traffic flow feedback contents to evidently improve the capacity and performance of road networks.
Contents of the information feedback strategies are of two different types, namely, real-time and prediction feedback. However, all above-mentioned classic strategies almost adopted the former as major feedback factors. Compared with real-time information, prediction information obtained by some reliable prediction algorithm has many undisputable advantages. In particular, prediction information can reflect accurately short-term traffic flow conditions. In the prediction information circumstances, a traveler is prone to make a more reasonable route-choice [18, 19]. Nevertheless, only Dong et al. [20] took the lead in proposing to a prediction feedback strategy (PFS). Subsequently, they discussed the efficiency and superiority of PFS in three-route systems [21]. Their pioneering work convinced us of correctness and validity of prediction feedback ideology, but they could not rationally probe into details of the prediction method. In their research, the prediction information was calculated by means of pushing ahead the simulation system with the specified number of steps. It is ineffective that the later running results of traffic systems were adopted as feedback to guide current travelers' route-choices in practice.
On the other hand, some scholars pointed out that travelers' route-choice behavior was inconsistent with the principle of maximum utility theory (MUE), which is a conventional presumption to be taken for granted in the past research of information feedback strategies [22–24]. Previous studies on feedback strategies could not take account of the complex relationship between route-choice behavior and real-time feedback information and purported that travelers would always choose the shortest-time route according to feedback information. Ben-Elia and Shiftan [25] suggested that travelers should make route-choice relying on both real-time information and their historical experience. Bekhor and Albert [26] demonstrated that certain sensation seeking domains alongside traditional variables played an important role in route-choice behavior with pretrip travel time information. It demands that we should introduce another more practical route-choice model than MUE to imitate travelers' route-choice behavior. Furthermore, Niu and Zhou [27] proposed a dynamic traffic demand driven idea to solve urban traffic problem, and they studied the optimizing urban rail timetable by this advantageous notion. Compared with conventional fixed traffic demand, the dynamic traffic demand driven idea is more practical.
The purpose of this study is to find an accurate and feasible prediction algorithm for prediction feedback strategies in terms of realistic traffic conditions. In our study, the autoregressive-integrated moving average model (ARIMA) is adopted to forecast traffic flow conditions, and the discrete choice model is chosen to imitate traveler's route-choice behavior rather than MUE. Mean velocity selected from several parameters of traffic flow such as travel-time, flux, density and velocity, is used for prediction object of ARIMA, because it is typical of traffic conditions. Moreover, performance analysis of such mean velocity prediction information feedback strategy (MVPFS) in two-route scenario is expounded.
The remainder of this paper is organized as follows. In Section 2, traffic flow characteristic is investigated in order to build a proper prediction model of traffic flow, and ARIMA prediction modeling framework is depicted in detail on the basis of two-route scenario. In Section 3, we present factual simulation results and analyze the results concerning the comparison of MVFS. In the ending section, we work out some conclusions and suggestions.
2. Mean Velocity Prediction Information Feedback Strategies
2.1. Traffic Flow Characteristic
A traffic flow system mainly composed of people, vehicles, and roads is commonly regarded as a time-varying complex nonlinear system. As an important research method in nonlinear computational science, the cellular automata model is very applicable to imitate a space-time evolutionary process of microcosmic traffic flow systems dynamically [28, 29].
Compared with the NS mechanism that is the most popular and simplest cellar automaton model to investigate the traffic flow, the VDR mechanism is a more functional one in analyzing the traffic flow [30], which considers the velocity dependence of random brake p. In this model, due to the variables of discrete time and space, the road is subdivided into cells of length 7.5 m, and the vehicles update their positions and velocities according to the following rules:
acceleration: v n (t) → v n (t + 1/3) = min {v n (t) + 1, Vmax };
deceleration: v n (t + 1/3) → v n (t + 2/3) = min {v n (t + 1/3), d n (t)};
randomization with probability P n (t + 1):

vehicle motion: x n (t + 1) = x n (t) + v n (t + 1).
Where v n (t) is the speed of the nth vehicle at time t; Vmax denotes the maximal velocity of vehicles; d n (t) is defined to be the number of empty cells in front of the nth vehicle at time t; x n (t) is the location of the nth vehicle at time t; P0 and P d denote the probabilities of randomization according to vehicle's velocity at time t, and P d is smaller than P0.
2.2. Two-Route Scenario
The two-route scenario was investigated by Wahle et al. [8] in which travelers chose one of the two routes according to the feedback information displayed on a variable message sign (VMS), located at the entrance of routes (see Figure 1). In the two-route scenario, it is supposed that there are two routes A and B of the same length L. The concept of three-route systems, which contains three routes of the same length, is analogous with the situation of two-route systems.

The two-route scenario.
At every time step, a new vehicle is generated at the entrance of two-route system and will choose one route (A or B) according to VMS. If a new vehicle enters the desired route, it will be subjected to the rules of VDR model on the route. Conversely, if a new vehicle is unable to enter the desired route, it will be deleted. The vehicle will be removed after it reaches the end point of the route. An overall procedure of the feedback strategy is given as follows. Initially, two routes and VMS are empty, and new vehicles choose route l (l is A or B) randomly. After the prespecified time step, prediction feedback information will be computed based on real-time traffic data and displayed on the VMS at each time step.
As a rule, traffic conditions of one route could be characterized by density, mean velocity, and flux, which are defined as follows:

where ρ represents the traffic density on one route;
2.3. ARIMA Prediction Model
2.3.1. Modeling
If we set up a random variable X t to represent the mean velocity of all vehicles on one route at time t, {X t } (t = 1,2, 3, …, m) would structure a time series. The values of X t are constantly changeable with time, but not necessarily strict function of time. The values of this time series are affected partly by various accidental factors and show up highly randomicity and distinct nonstationary. But the more important thing is there is a certain statistical correlation among the time sequences. It can be deduced that {X t } is a nonstationary stochastic time series, so we can build a rational statistical model to interpret statistical regularity in the time sequences [31]. It is the statistical model that makes it possible to forecast short-term traffic flow. Smith et al. [32] and Min and Wynter [33] expounded the role and steps of ARIMA for short-term traffic flow forecasting. In time series analysis, ARIMA is an effective approach to find the best fit of a time series to past values of this time series, in order to make forecasts.
ARIMA model takes historical data into account and decomposes it into an Autoregressive (AR) process; an Integrated (I) process, which accounts for differential stationarizing to preprocess the original nonstationary stochastic time series; and a Moving Average (MA) of the forecast errors, such that the longer the historical data, the more accurate the forecast will be, as it learns over time. There are three parameters (p, d, q) interacting each other in ARIMA model. Where p is the number of autoregressive; d is the number of differences; q is the number of moving average terms [34, 35].
Before building ARIMA model, we should adopt zero mean normalization and differential stationarizing method to preprocess the original nonstationary stochastic time series. The reason for data preprocessing is that the unique object for ARIMA model is zero mean value stationary stochastic time series. Such zero mean normalization method and the differential stationarizing method (only given first order and the rest may be deduced by analogy) are expressed by (3) and (4), respectively:


where X t ′ represents the result of zero mean normalization, and {X t ′} are a new time series; m is the length of original time series; ∇X t ′ represents the result of differential stationarizing, and {∇X t ′} are a zero mean value stationary stochastic time series, which are the input data of ARIMA model. Just to be clear, we set up another stochastic time series {Y t } (1 < t ≤ m) to represent {∇X t ′}.
The general form of ARIMA (p, d, q) model is expressed as

where
The best linear forecast is a necessary concept to implement forecasting in ARIMA. We set up that B and A
j
(1 ≤ j ≤ m) are random variables of zero mean value and bounded variance. For a ∈ Ω and ∀b ∈ Ω, the inequality (6) is valid. Then, a
T

On the basis of the above analysis,
where r = max (p, q); Z t = Y t − L(Y t ∣Yt − 1) and Z1 = Y1; θm + k, i is a parameter that can be obtained by recursive formula

where γ l is autocovariance function; it can be calculated by

2.3.2. Prediction Steps
The following gives a brief description of the prediction algorithm.
Step 1 (Identification). This process aims to find the best-fit values of parameters (p, d, q) for the time series data. The value of parameter d represents the number of differences for time series {X t }. Once {X t } has been rendered stationary by differencing, the choice of p and q may be made by examining two time-domain constructs: the autocorrelation function (ACF) and the partial autocorrelation function (PACF). Specifically, values of parameters p and q could be decided by akaike information criterion (AIC). Supposing that P0 is upper bound of p and Q0 is upper bound of q, for ∀(k, j), 0 ≤ k ≤ P0 and 0 ≤ j ≤ Q0 are valid. Thus, the value of AIC function can be calculated by

where
Step 2 (Estimation). Once the parameters (p, d, q) are determined, next step is to estimate all autoregressive and moving average parameters in ARIMA model. The least square method is a popular choice for parameter estimation.
Step 3 (Diagnostic checking). It is a necessary step to make reasonableness check for the preliminary ARIMA (p, d, q) model, which is just built by Steps 1 and 2. If the check results meet the requirements, we can accept this preliminary fitting model. If not, we should return step 1 and refit the model, until the check results are compatible.
Step 4 (Forecasting). We can use the ARIMA model that has accomplished the first three steps to forecast Xm + 1, which represents the mean velocity of all vehicles on one route at time m + 1. Furthermore, Xm + η (η ∈ [1, h]) could be obtained by the recursive method. Where η is a certain time of future; h is the maximum prediction period.
2.3.3. Prediction Information Feedback
After obtaining the forecasting series {Xm + η}, we can calculate the mean value of {Xm + η}. And then, such mean value about route l can be denoted as F l , which indicates short-term traffic conditions regarding route l. It is F l that would be displayed on VMS as feedback information.
2.4. Route-Choice Model
Acquiring the prediction feedback information F l displayed on VMS, travelers will make route-choices according to the Logit model. In this model, travelers would choose route l with a probability p l as

where λ ∈ [0, + ∞) denotes the rational degree of travelers. When λ = 0, the probability of choosing one route is equal to that of another route and it is 1/2. When λ → + ∞, traveler's choice is the optimal route.
2.5. Processing Procedures
Figure 2 shows a schematic diagram of the mean velocity prediction information feedback strategy, which demonstrates the affecting mechanism of information feedback.

The schematic diagram of prediction feedback.
3. Simulation Results and Discussions
In simulations, the length of two-route L is 1000 cells; the maximal velocity Vmax is set to be 4; the randomization break probability is P0 = 0.5 and P d = 0.25. In the route-choice model, we set λ = 3.5. Before verifying performance of MVPFS, we should fix the ARIMA model parameters (p, d, q) firstly. Testing and calculating by using historical simulation traffic data generated from VDR model, we could confirm that the best-fit values of (p, d, q) are (1,1, 2).
All simulation results of flux, velocity, and vehicle number are obtained by 60000 iterations excluding the initial 50000 time steps. We compared MVPFS with MVFS under the same condition in order to reveal characters of the new strategy. In addition, we investigated the relationship between the performance and the prediction periods, including 100, 200, and 300.
Figure 3 displays the changing of flux of each route according to time when adopting the four kinds of feedback strategies. Regardless of feedback strategies, the numbers of vehicles passing through the entire two-route system are approximately equal. There is nevertheless a perceptible difference in intermittent oscillation frequency between real-time and prediction feedback. The intermittent oscillation frequency of real-time feedback is more violent than that of prediction feedback, and it manifests that prediction feedback can suppress the intermittent oscillation frequency more effectively.

The flux of each route with (a) MVFS, (b) MVPFS with 100 periods, (c) MVPFS with 200 periods, and (d) MVPFS with 300 periods.
Figure 4 illustrates the changing of mean velocity of each route according to time when adopting the four kinds of feedback strategies. There are distinct differences among these strategies. Firstly, the variation range of prediction feedback is obviously smaller than that of real-time feedback; secondly, the intermittent oscillation frequency of prediction feedback is perceptible lower than that of real-time feedback; lastly and most importantly, the average velocity of prediction feedback is evidently higher than that of real-time feedback.
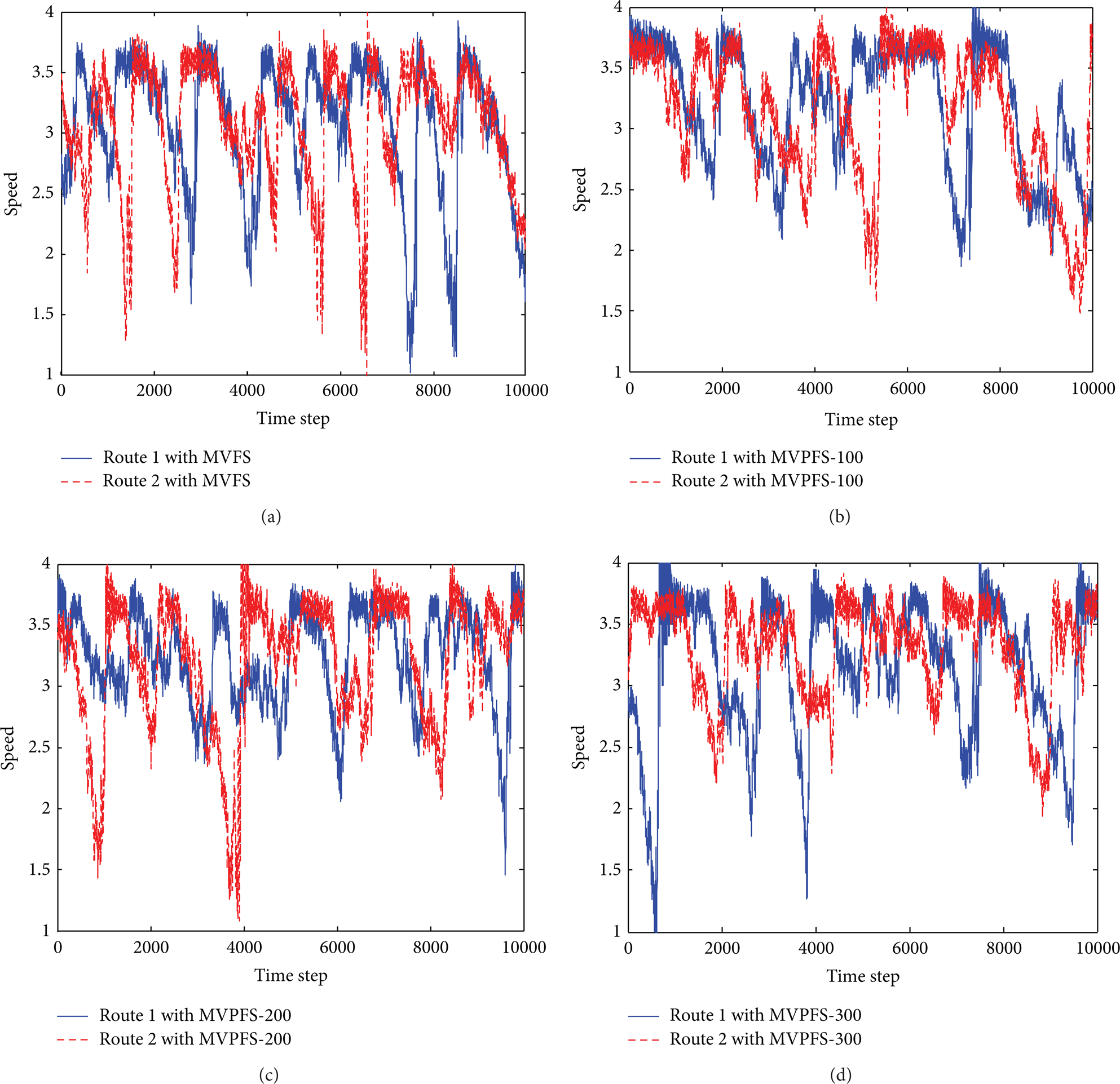
The average speed of each route with (a) MVFS, (b) MVPFS with 100 periods, (c) MVPFS with 200 periods, and (d) MVPFS with 300 periods.
Figure 5 illustrates the changing of vehicle's number of each route according to time when adopting the four kinds of feedback strategies. On the whole, there are no significant differences between prediction feedback and real-time feedback. It means there are basically the same densities among four strategies.

The vehicle number of each route with (a) MVFS, (b) MVPFS with 100 periods, (c) MVPFS with 200 periods, and (d) MVPFS with 300 periods.
Therefore, we can deduce that the prediction feedback strategy is superior to the real-time feedback strategy. In addition, there is a particular concern that is the complex relationship between performance of strategy and prediction periods. Performance of feedback strategies seems intuitively to be greatly affected by prediction periods. But this is not the case. The reason may be that more prediction periods have only a modest impact on the travelers' route-choice. Of course, precision of traffic prediction may be part of the reason.
The statistical analysis of simulation results is to be demonstrated in Table 1. It is known that travel time is a dominant factor for road users making route-choice. We can see clearly from Table 1 that the average travel time of MVFS is longer than those adopting prediction feedback strategies. When adopting the prediction feedback strategies, we can better realize traffic assignment, so as to alleviate traffic congestion. In prediction feedback strategies, the strategy with 300 periods is superior to the rest two strategies a little. But, more computing resource is consumed in vain. Thus, we can comprehend that the prediction periods has limited effect on the performance of prediction feedback strategies.
Numerical analysis of simulation data.

4. Conclusions
By the aid of ATIS, we studied the approach about how to use prediction information in feedback strategies. In this study, we proposed a feasible and effective prediction information feedback approach—the mean velocity prediction information feedback strategy. On the basis of traffic flows characteristic analysis, the autoregressive-integrated moving average model was adopted to forecast traffic flow conditions, which is an excellent prediction method in stochastic time series analysis. Both the selection of prediction object and the whole prediction procedure were discussed in detail. VDR model was adopted to verify the performance of this prediction feedback strategy. Simulation showed that prediction feedback was more advantageous to route-choices of all travelers.
Compared with the mean velocity feedback strategy, new strategy can reduce travel time of travelers and promote utilization efficiency of road networks palpably. Although the prediction periods have limited effect on the performance of feedback strategies, we suggest that more periods should be adopted if possible. In the further research, we are going to find more precise prediction algorithm and endeavor to reveal the complex relationship between performance of feedback strategies and prediction periods.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgments
This research work is supported by the Humanity and Social Science Youth foundation of Ministry of Education in China (Grant no. 12YJC630200), the Natural Science Foundation of Gansu Province in China (Grant no. 145RJZA190), and the Social Science Planning Project of Gansu Province in China (Grant no. 13YD066).