
Abstract
This paper presents a proximity-based event detection scheme for wireless sensor networks. It is a hybrid scheme in the sense that it takes advantage of both neighbor-based and cluster-based schemes in distinguishing events from false alarms due to faulty nodes. It gives more weights to alarms in closer proximity, while making event decisions at the cluster heads to reduce the communication overhead. The proposed scheme can effectively reduce false alarms while accurately detecting events even for a relatively small event region. Simulation results show that it greatly lessens the tradeoff between event detection accuracy and false alarm rate. Further improvements in performance can be made by removing identified faulty nodes from the network during normal operation.
1. Introduction
A wireless sensor network (WSN) is a network comprised of tiny sensor nodes that are spatially distributed to monitor various environments and detect events of interest. Such a network left unattended is vulnerable to faults including malicious attacks. Incorrect reports due to faulty sensor nodes might result in a wrong decision on the occurrence of an event. Hence, it is important to draw precise inferences from the sensed data collected and reliably detect an event in the presence of faulty or malicious nodes.
A number of fault or fault-tolerant event detection schemes have been proposed for wireless sensor networks to achieve high reliability in data aggregation and decision-making [1–10]. They are primarily either neighbor-based or cluster-based schemes, mostly without requiring any external processing. Neighbor-based schemes can achieve good performance for a relatively high node degree or at the expense of more internode communication. Cluster-based schemes, on the other hand, can make more efficient use of resources and are known to be energy efficient in aggregating sensor readings. They, however, might suffer from inaccuracy in local decision or difficulty in aggregating data from different clusters. If an event area is relatively small and lies across multiple clusters, it is difficult to set a threshold for decision-making. Especially for a fault-prone sensor network there is a strong tradeoff between event detection accuracy and false alarm rate, which can hardly be overcome.
Krishnamachari and Iyengar [6] made some initial steps to solving the fault-event disambiguation problem in sensor networks. They presented Bayesian algorithms to detect events in the face of faulty sensor nodes by exploiting the fact that sensor faults are likely to be stochastically uncorrelated, while event measurements are likely to be spatially correlated. Luo et al. [7] proposed a fault-tolerant energy-efficient event detection scheme. For a given detection error bound minimum neighbors can be selected to minimize the communication cost. In [8] a secure distributed event boundary detection scheme for WSN was proposed to identify event boundaries in an adversarial environment. Distributed event detection using a reputation-based voting and decision tree classifiers has been presented for disaster management in WSNs [9]. Most of them have presented fault-tolerant detection schemes for flat architecture. Little effort has been made in developing distributed detection schemes for hierarchical sensor networks.
Fault and event detection problems in clustered hierarchical networks have been investigated in [11–13]. Atakli et al. [11] proposed a fault detection scheme using weighted trust evaluation for a hierarchical sensor network. Trust values are employed to identify faulty nodes behaving arbitrarily regardless of the actual readings. Ju et al. [12] presented another intrusion detection scheme based on similar weighted trust evaluation, where the mistaken ratio of each individual sensor node is used in updating the trust values. More recently a distributed fault-tolerant event region detection scheme for a hierarchical sensor network is proposed [13]. However, the event detection problem for relatively small event regions and without location information of sensor nodes has not been investigated. In addition, the problem of distinguishing events from false alarms due to malicious faults in clustered networks has not been sufficiently studied. Fault or event detection schemes based on natural faults cannot function effectively in the face of malicious faults. The problem becomes even more complicated as the size of the event region decreases.
In this paper, we present a hybrid scheme for detecting events in the presence of faulty nodes in clustered sensor networks. It uses hierarchical decision based on a threshold test, while employing proximity-based local aggregation in computing the weight of each sensor node for the test. The final decision on the occurrence of an event is made at the cluster head without location information of sensor nodes and intergrid communication. It achieves good performance even for a relatively small event region. The scheme is robust to both natural and malicious faults and can maintain consistent performance as long as the number of faulty nodes is gradually increasing.
The rest of the paper is organized as follows. Section 2 discusses some preliminaries to our work, including fault model and event model. In Section 3, the proposed scheme for detecting events is presented. Simulation results are shown in Section 4. Section 5 concludes the paper.
2. Preliminaries
The problem of fault or event detection in sensor networks becomes complicated as the number of faulty nodes increases. In particular when the number of faulty nodes in a cluster is comparable to the number of event nodes in a cluster, it is difficult to choose a threshold value for distinguishing events from false alarms due to faulty nodes. The resulting event detection accuracy can hardly be high without increasing false alarm rate. To lessen the tradeoff between event detection accuracy and false alarm rate we propose a proximity-based detection scheme which gives more weights to alarm nodes located close to each other. We first describe the event detection problem for a special type of sensor network, called grid-based clustered sensor network [14, 15], for comparison purposes, and then introduce our proposed scheme in the subsequent section.
2.1. Grid-Based Sensor Networks
Grid-based sensor networks have been investigated for energy efficient data aggregation and routing [14]. The sensor field in a grid-based sensor network here is assumed to be divided into

A sensor network with four grids.
In detecting an event in the face of faulty or malicious nodes, sensor nodes with an abnormal sensor reading report an alarm to the CH so that it can make the final decision on the occurrence of an event. However, the decision made at the head based on the aggregated data might be inaccurate due to the difficulty in distinguishing an event from false alarms, especially when the size of the event region is relatively small. If the region lies across multiple grids as illustrated in Figure 1 (see the dotted circle), each grid might have insufficient number of event-nodes to apply a threshold test. Consequently, lowering the threshold might be needed to meet the event detection accuracy requirement, sacrificing the false alarm rate. To cope with the expected poor performance intergrid communication can be employed to exchange information among the adjacent grids. This might cause significant communication and computation overheads.
In order to lessen the tradeoff between event detection accuracy and false alarm rate we extend the model slightly for our hybrid scheme to be addressed in the next section.
2.2. Fault Model and Event Model
In this paper, we focus on a special type of fault, called data fault. That is, each sensor node behaves as a normal node but might generate incorrect readings naturally or intentionally due to faults. We assume that each sensor node is aware of the range of valid readings during no event period. Any readings outside the valid range are called “unusual” readings for clarity. Hence, each sensor node can make a binary decision on its own sensor reading, where a “1” indicates an unusual reading. Sensor nodes in an event region are expected to report a 1, unless they are faulty. That is, event reports to the CH are binary specifying the potential occurrence of an event.
We assume that sensor nodes are faulty randomly and independently with the same probability
An event region is assumed to be a circle with radius
3. Event Detection Using Proximity Information
In order to achieve high event detection accuracy while keeping false alarm rate low we use a hybrid approach in aggregating sensor readings to take advantages of both neighbor-based and hierarchical schemes.
3.1. Network Model
We assume that the network consists of low-cost tiny sensor nodes and more powerful head nodes, although a homogeneous network with rotating cluster-heads may be used as well. Sensor nodes are logically divided into multiple grids (clusters), each of which has its own CH. Each sensor node in the network is assumed to have a unique ID and thus can construct a list of its neighboring nodes, where two nodes are neighbors of each other if the distance between them is less than or equal to
In Figure 2, for example, node

Hierarchical decision with proximity information.
The extra work to be done by each node in the network, as compared to the typical grid-based sensor network, is that each node should broadcast to its neighbors only once if it is an alarm node (i.e., its sensor reading is a 1). Since the process is event-driven, only the alarm nodes are involved as far as counting the number of 1's is concerned. In addition, events may occur randomly in any place in the monitored area. Hence, the energy consumed by each node might be balanced over time. Furthermore,
3.2. Trust Level of Sensor Nodes
Trust level is defined here to indicate the trustworthiness of sensor nodes in reporting alarms in the wireless sensor network. For a CH with n member nodes
In the case where the decision at the CH is no event, the CH updates the trust levels of its member nodes as follows:
In the case of an event, the levels of the nodes within the event region need to be lowered if they have reported a 0. Due to the difficulty in finding the exact boundary of an event region without any location information, we do not apply any updates when the decision is an event.
3.3. Proximity-Based Event Detection
In detecting an event, proximity information is used at the CH to perform a simple test with a predefined threshold. In the beginning each sensor node identifies its neighboring nodes and reports them to the CH so that the CH can figure out the names and node degrees of its member nodes and how they are connected. For convenience we first list the notation to be used in this paper (see Nomenclature Section).
Once an unusual reading is observed at a sensor node, the node sends a 1 to its neighbors so that each of the alarm nodes can count the number of 1's (including its own reading),

Finally, the decision on the occurrence of an event is made at the CH as follows with another predefined threshold

Our fault model defined earlier assumes only data faults in sensor readings. Internode communication is assumed to be fault-free. The scheme, however, is robust, to some extent, to communication faults as far as computing the number of 1's,
Our event and fault detection scheme can be described as follows.
Proximity-Based Event Detection.
Each sensor node Each sensor node CH determines CH performs the threshold test with Update trust levels of member nodes at the CH in the case of no event.
The values of
Communication between CHs is needed only in Step (5) to logically isolate faulty nodes from the network. The IDs of faulty nodes are broadcasted to the member nodes so that they can update their neighbor lists accordingly. Updating the neighbor lists is also needed at the CH for the future threshold decisions.
4. Simulation Results
We conducted some experiments to evaluate the performance of the proximity-based robust detection scheme. A sensor network where 320 sensor nodes are randomly deployed in a square area is used for the simulation. The network area is logically divided into 4 × 4 grids of the same size, each of which has 20 nodes on average. The transmission range
Although there are many fault or event detection schemes for sensor networks, few schemes can be applied to clustered sensor networks without location information of sensor nodes. In addition, most of them deal with only natural faults. Due to the differences in fault models malicious behavior can hardly be effectively dealt with under the models, especially for a relatively small event region. Hence, the local decision scheme with a single threshold θ in a grid-based sensor network, introduced in Section 2.1, is also simulated for comparison purposes.
We first evaluate EDA and FAR for the local decision scheme (called LDG for convenience). The results for various values of

EDA and FAR for various values of
EDA is required to be high since an event undetected might cause a significant damage. EDA ≥ 0.95 in the figure can be achieved only when
To see the performance improvements we then evaluate EDA and FAR of the proposed proximity-based scheme (PBS) for various values of

EDA and FAR for PBS for various values of
EDA can be maintained relatively high for the chosen values of
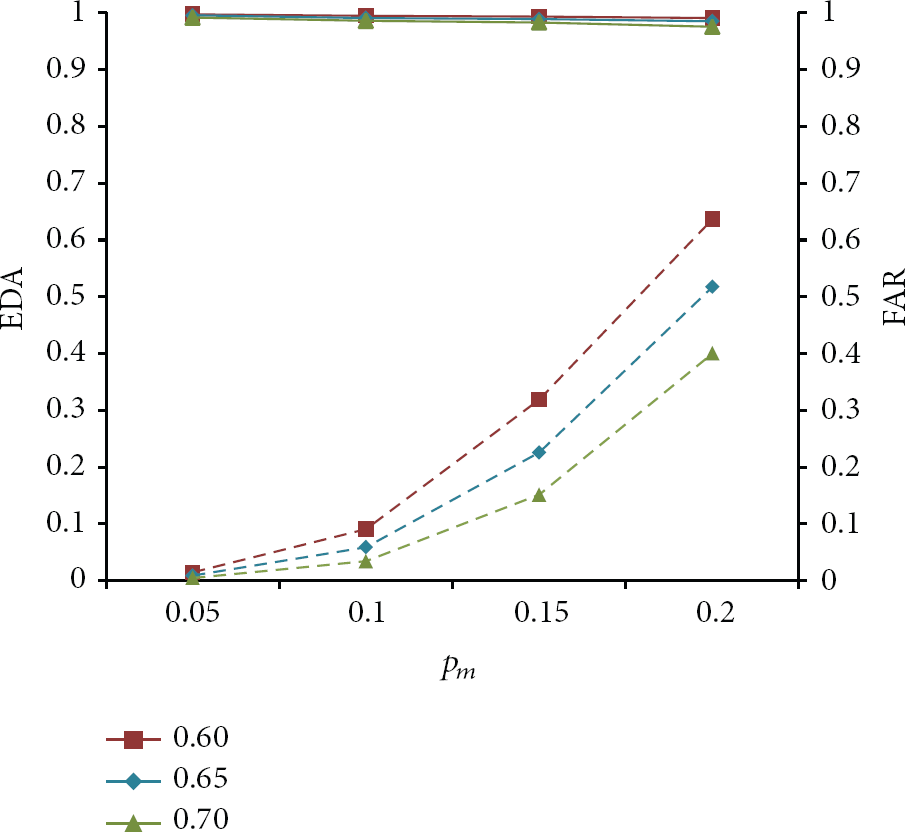
EDA and FAR for PBS for various values of
The tradeoff between EDA and FAR for LDG can also be lessened when
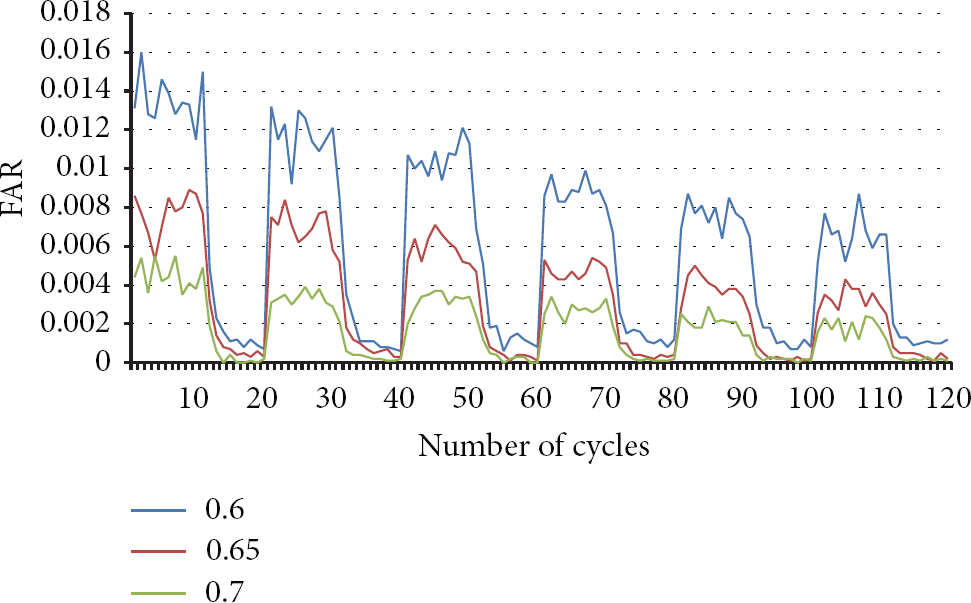
Further reductions in FAR can be made by identifying faulty nodes using trust levels and removing them upon detection. Isolating faulty nodes upon detection effectively lowers the fault probability in such a way that the corresponding FAR can be greatly reduced with time as shown in Figures 6 and 7, where

FAR of PBS for for

FAR of PBS for
So far we have performed simulation for various values of
FAR for PBS when
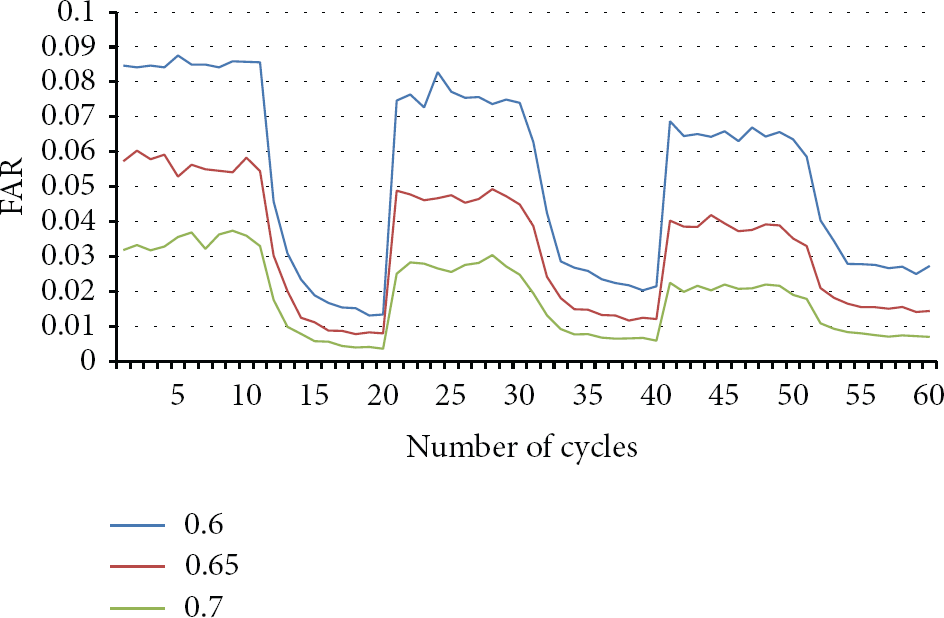
FAR for PBS when
In our simulation, relatively small event regions are considered to see the worst case performance. Hence, we claim that the proposed scheme can perform better as the size of the event region increases. The adaptability of the proposed scheme allows us to meet both EDA and FAR requirements even for relatively high fault probabilities. The same is true unless the faults occur almost simultaneously.
5. Conclusion
In this paper, we presented a proximity-based robust event detection scheme for wireless sensor networks. The scheme does not assume that sensor nodes have any prior knowledge about their locations. It makes event decisions at the cluster-head based on a threshold test using the proximity information. Overhearing links are exploited to extend the coverage area of each cluster. More weights are given to alarm nodes located close to each other in distinguishing events from false alarms. The proposed scheme is adaptive in the sense that faulty nodes detected are isolated from the rest of the network to maintain consistent performance. The simulation results show that the scheme yields high performance even for a relatively small event region. Much better performance can be expected as the event region increases. The scheme is also shown to be effective for increased number of faults unless all the faults occur almost simultaneously.
Footnotes
Nomenclature
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) Grant funded by the Korean Government (NRF-2011-0007187).