
Abstract
In this paper, a parametric constitutive model based on Abel dashpot is established in a simple form and with clear physical meaning to deduce the expression of dynamic mechanical modulus of MREs. Meanwhile, in consideration for the pressure stress on MREs in the experiment of shear mechanical properties or the application to vibration damper, some improvements are made on the particle chain model based on the coupled field. In addition, in order to verify the accuracy of the overall model, five groups of MREs samples based on silicone rubber with different volume fractions are prepared and the MCR51 rheometer is used to conduct the experiment of dynamic mechanical properties based on frequency and magnetic field scanning. Finally, experimental results indicate that the established model fits well with laboratory data; namely, the relationship between the dynamic modulus of MREs and changes in frequency and magnetic field is well described by the model.
1. Introduction
Magnetorheological elastomers (MREs) constitute an importance branch of magnetorheological smart materials and are viscoelastic materials formed after micron-sized soft magnetic particles are dispersed in viscoplastic high-molecular polymer matrix and then cured after being placed in a magnetic field with certain intensity. Properties of MREs such as mechanics, magnetics, and electrics vary with the external magnetic field and thus realize the controllable performance. As the solid-state analog of magnetorheological fluids (MRFs), MREs have overcome MRFs shortcomings of settlement and bad sealing stability and have become a hot spot of magnetorheological materials in recent years. However, the current study of MREs is still under the phase of laboratory study, and few MREs and corresponding vibration dampers are applied in practical engineering. Based on different soft magnetic materials and matrix materials [1, 2] and different particle diameters and volume fractions [3, 4], researchers have designed and prepared different types of MREs [5, 6] and studied the effects of MREs thickness [7], ferromagnetic particle distribution [8], and magnetic flux density [9] on mechanical properties and magnetorheological effect; in terms of studies on the working mechanism, researchers mainly focus on studying MREs micromodels [10, 11], so as to discuss its macromechanical properties. In order to facilitate the design of MREs vibration damper, the viscoelastic constitutive relation of MREs must be built; however, at present, relevant studies are only limited to the classical viscoelastic model theories of three elements, four elements, and five elements [12].
Although classical viscoelastic model theories are easy to understand and have clear physical concepts, they fail to fit well with laboratory data in describing the mechanical behavior of viscoelastic materials. In addition, considering the deformation of high polymer materials is strongly dependent on time and temperature, the classical viscoelastic model will not work well; however, disadvantages of classical viscoelastic model are much remedied by fractional calculus. Based on experimental results, Gemant [13] advised that the fractional derivative should be adopted in the establishment of material model; Bagley and Torvik [14] studied the three-dimensional constitutive relation of fractional derivative, restrictions of thermodynamics on model parameters, and finite element method; Wu and Shangguan [15] adopted the viscoelastic fractional derivative model to establish the dynamic mechanical model of rubber vibration isolator.
In this paper, based on viscoelastic mechanical behavior of matrix and variation characteristics of magneto-induced modulus of MREs, Abel dashpot is used to substitute for the classical Newton dashpot. Meanwhile, a parametric constitutive model based on fractional calculus and able to describe dynamic mechanical property of MREs is constructed. Finally, experimental results verify that the model is accurate.
2. Theory
2.1. Mathematical Expression of Fractional Calculus
At present, the fractional calculus has many definitions but has no unified form. Riemann-Liouville fractional calculus operator is widely used in viscoelasticity constitutive relation, and its basic definition is expressed as follows [16].
α order integral of function f(t) is defined as

And its α order differential is defined as
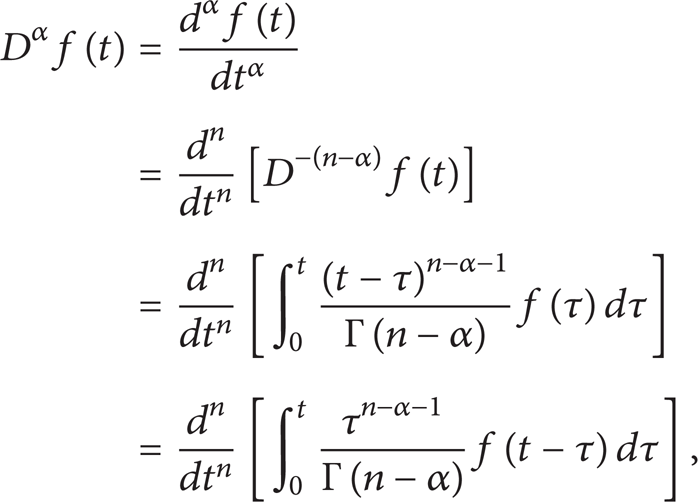
where α>0 and n–1 ≤ α ≤ n, and n is a positive integer.
If n = 1, then (2) will be transformed into
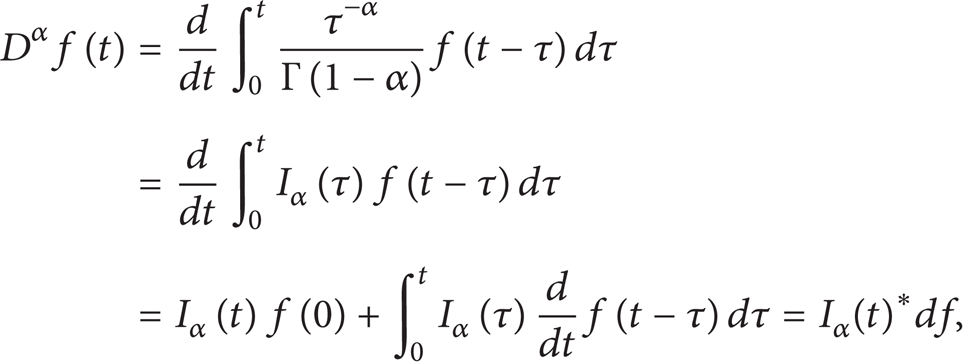
where Γ(x) is the gamma function and satisfies

Consider
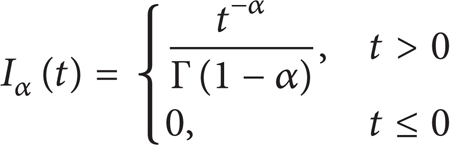
is Abel core, and “
The Fourier transform related to fractional calculus is as follows:

where ω denotes the angular frequency and that transform can realize the shift from time domain to frequency domain.
2.2. Parametric Constitutive Model of MREs
Without the action of external magnetic field, dynamic mechanical properties displayed by MREs are identical with those of general viscoelastic materials [17]. When the matrix is vulcanized and formed, soft magnetic particles, after being cured in the magnetic field, are arranged into ordered chain structure and locked into matrix; however, at the macrolevel, those particles can be considered as continuous and homogeneous materials and equivalent to filling particles in traditional elastomers. When an external magnetic field is applied, soft magnetic particles will undergo the nonlinear magnetization, and the magnetic force between particles will be enhanced. Hence, if the intensity of external magnetic field is changed, the additional moduli generated by magnetic field will vary with it. Since Abel dashpot model not only retains theoretical advantages of the classical viscoelastic models, but also overcomes other disadvantages, better results will be obtained by combining few elements. Hence, Abel model element, ordinary spring element, and nonlinear spring element are combined in series and parallel to establish MREs parametric constitutive model.
The parametric constitutive model representing MREs viscoelastic mechanical behavior and magneto-induced characteristics is shown in Figure 1.

Parametric constitutive model of MREs.
In Figure 1, element ① is Hooke spring, essentially the ideal elastomer. Without regard to the inertial effect, its stress-strain constitutive relation conforms to σ1 = E0ε1(t).
Element ② is Abel dashpot, and its constitutive relation [18] is expressed as σ1 = ηDα[ε2(t)], where η denotes the viscosity coefficient of Abel dashpot. When α = 1, Abel dashpot is simplified into Newton dashpot element; generally, the value of α in Abel dashpot is 0<α<1.
Element ③ is the nonlinear spring element representing magneto-induced characteristics of MREs, and its stress-strain constitutive relation is expressed as σ2 = E m ε(t), where E m is the magneto-induced modulus related to external magnetic field and MREs strain. Relevant study results indicate that the value of the modulus hardly varies with frequency and produces little damping effect on MREs [19].
Mechanical properties of viscoelastic materials are similar to those of models made of elastic elements and viscous elements according to certain rules, and the new viscoelastic material of MREs can be described by the model combining several mechanical elements. Virtually, the parametric model in Figure 1 connects Hooke spring and Abel dashpot in series to establish a Maxwell model based on fractional operator to describe matrix characteristics of MREs and then connects the model with the nonlinear spring element in parallel. Because the magneto-induced modulus is mainly influenced by external magnetic field and strain and little by frequency, the magneto-induced modulus can be regarded as the linear superposition in fractional operator Maxwell model. Since each element is able to describe the ability of different mechanical properties of MREs, the combined model can describe macroscopic mechanical behavior of MREs. In this paper, the model is mainly used to study the dynamic mechanical characteristics of MREs in magnetic field.
The parametric model satisfies the following equation:

According to (7), the constitutive relation of MREs parametric model is

2.3. Complex Modulus and Complex Compliance in Dynamic Mechanics
After fractional Fourier transform, (8) is transformed into

According to the definition of complex modulus, the complex modulus of MREs parametric constitutive model is

Because
The storage modulus of MREs is

The loss modulus of MREs is

In addition, according to the definition of complex compliance, the complex compliance of MREs parametric constitutive model is

Thus, the storage compliance of MREs is

The loss compliance of MREs is

The energy dissipating rate [21] of MREs unit volume is
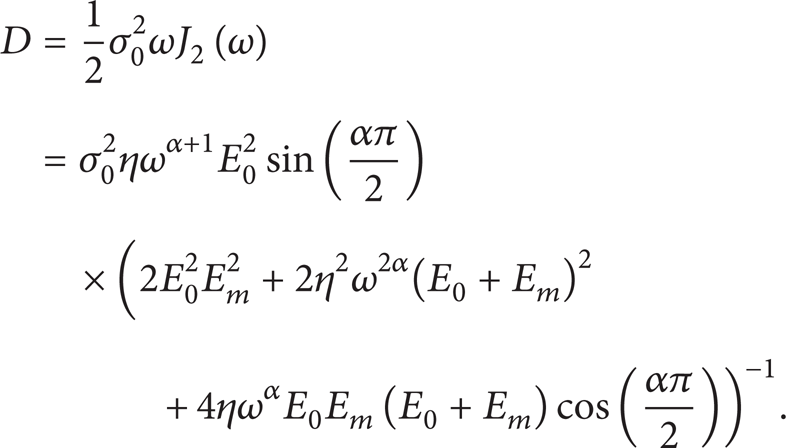
Therein, σ0 denotes the alternating stress amplitude.
The loss factor [22] is defined as the tangent of strain and stress cycle phase angle difference when viscoelastic materials are in alternating stress field, and its size is expressed as

It represents the ratio of the energy dissipated in each periodic vibration to the maximum strain energy.
The dynamic viscosity represents the internal friction of MREs in damping vibration [21], and it is expressed as
According to (9)–(16), the complex modulus and complex compliance of MREs parametric model are composed of the intrinsic modulus and magneto-induced modulus of matrix materials, so this model can describe the dynamic mechanical characteristics of MREs.
2.4. Magneto-Induced Shear Modulus E m of MREs
Before the application of magnetic field and preparation of MREs, soft magnetic particles are evenly dispersed in matrix, and, after being cured in the magnetic field, those particles take on ordered structures in chain or column. Under certain pressure, the shear model of chain particles of MREs is shown in Figure 2. Therein, d is the distance between centers of two nearby magnetic particles; assuming that all soft magnetic particles are equally large, the radius is r; σ is the vertical pressure stress. Considering no matter in material property test or in the application to vibration damper, certain pressure stress will be applied to MREs and have a strong effect on mechanical properties of MREs [23]; it cannot be ignored.
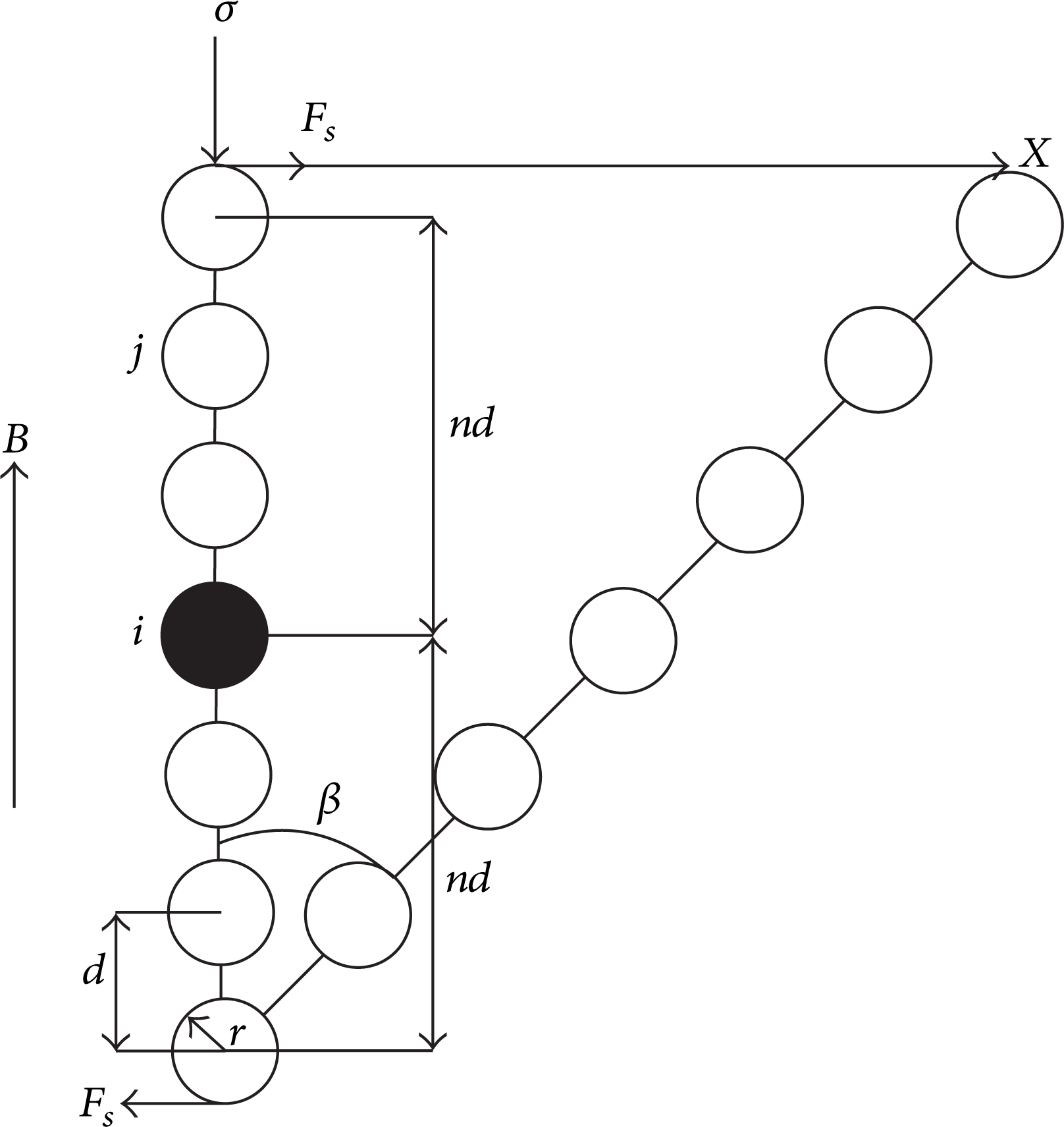
Particle chain shear model of MREs under pressure stress.
According to magnetic dipole theories, the interaction energy between two dipoles in the magnetic dipole moment of m1 and m2 is as follows, respectively,

As for any dipole i, its dipole moment is expressed as follows:

where μ0 = 4π × 10−7 H/m is the vacuum permeability, μ1 is the relative permeability of MREs matrix, and χ is particle magnetic susceptibility.
The magnetic-field intensity in the locality of particle i is expressed as

where

If
If the influence of vertical pressure stress is taken into account, in addition, the dynamic poisson ratio and the particle chain bending are not considered; the research will be simplified into one-dimensional shear problem. Then

where d0 is the distance between two nearby particles without vertical pressure stress and εmatrix = σ/Ematrix is the compressive strain of matrix. Because the rigidity of soft magnetic particles is far larger than the matrix rigidity, so the particle deformation can be ignored. And if

k0 = d0/r; assuming m i = m j = m, from (22)–(24), we can obtain

According to the literature [24], the magneto-induced shear modulus of MREs is

where γ denotes the shear strain and Φ denotes the volume fraction of particles.
Substitute (26) into (11), and we can obtain the expression of shear storage modulus of MREs under dynamic alternating load; namely,

3. Experiment on Dynamic Mechanical Property of MREs
In this paper, the MCR51 rotational rheometer produced by Austrian Anton Paar is adopted to test dynamic mechanical properties of MREs, and magnetorheological test modules are provided to help realize the dynamic mechanical property test of samples when a magnetic field is applied, as shown in Figure 3.
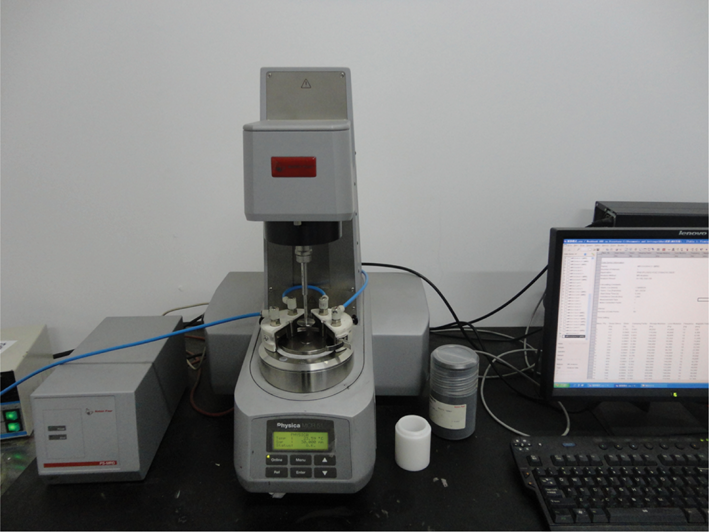
MCR51 rheometer.
The experiment on dynamic mechanical property of MREs is carried out under oscillatory mode and the rheometer uses the sinusoidal driving force σ = σ0sinωt to drive the parallel-plate rotor (PP20 measuring head) to experiment samples. Controllable parameters under such mode are strain amplitude, angle frequency, magnetic field, and so forth, and the experiment principle is shown in Figure 4. If the torque working on parallel plate is M, the radius of parallel plate is R, the interval is h, the torque value is Ω (unit radian), and γ max is strain amplitude, then

Hence, under oscillatory mode, the value of rheometer in each measure point corresponds to its strain amplitude.
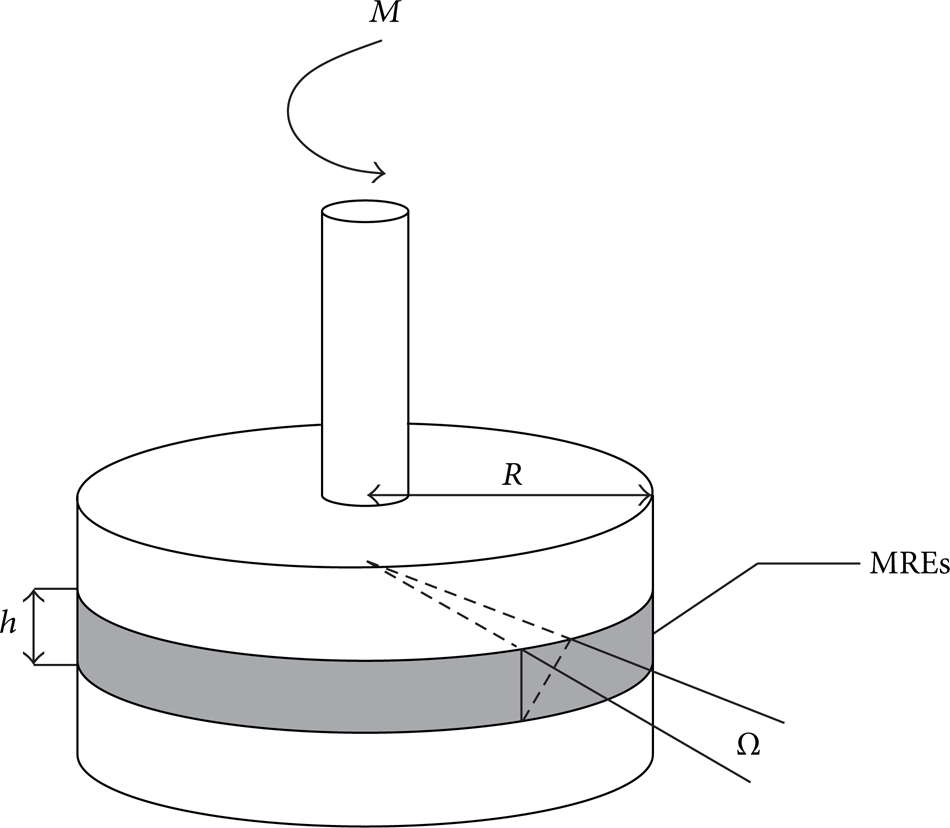
Schematic diagram of oscillatory shear experiment of parallel-plate rotor.
Raw materials such as carbonyl iron powder (CIP) (the average particle size is 3.5 μm), methyl silicone oil, and one-component RTV silicon rubber are adopted; five groups of MREs samples with different contents of ferromagnetic particles are prepared under the curing magnetic flux density of 500 mT; and volume fractions of ferromagnetic particles are shown in Table 1.
Volume fractions of MREs ferromagnetic particles Φ%.

The diameter of MREs samples is 20 mm, and the thickness is 2 mm. The working gap of parallel-plate rotor in rheometer is 1 mm. Hence, taking the compressive deformation of MREs matrix into account, we obtain εmatrix = 0.5. The fixed oscillatory strain amplitude is γ = 0.1%. Meanwhile, MREs samples are scanned under different frequencies and magnetic fields.
4. Experimental Results and Analysis
4.1. Strain Amplitude Scanning
To obtain the relationship between the loss modulus and strain, MRE-4 samples are separately scanned under 1 Hz, 10 Hz, and 100 Hz, and the relationship curve between loss modulus and shear strain is displayed in Figure 5.
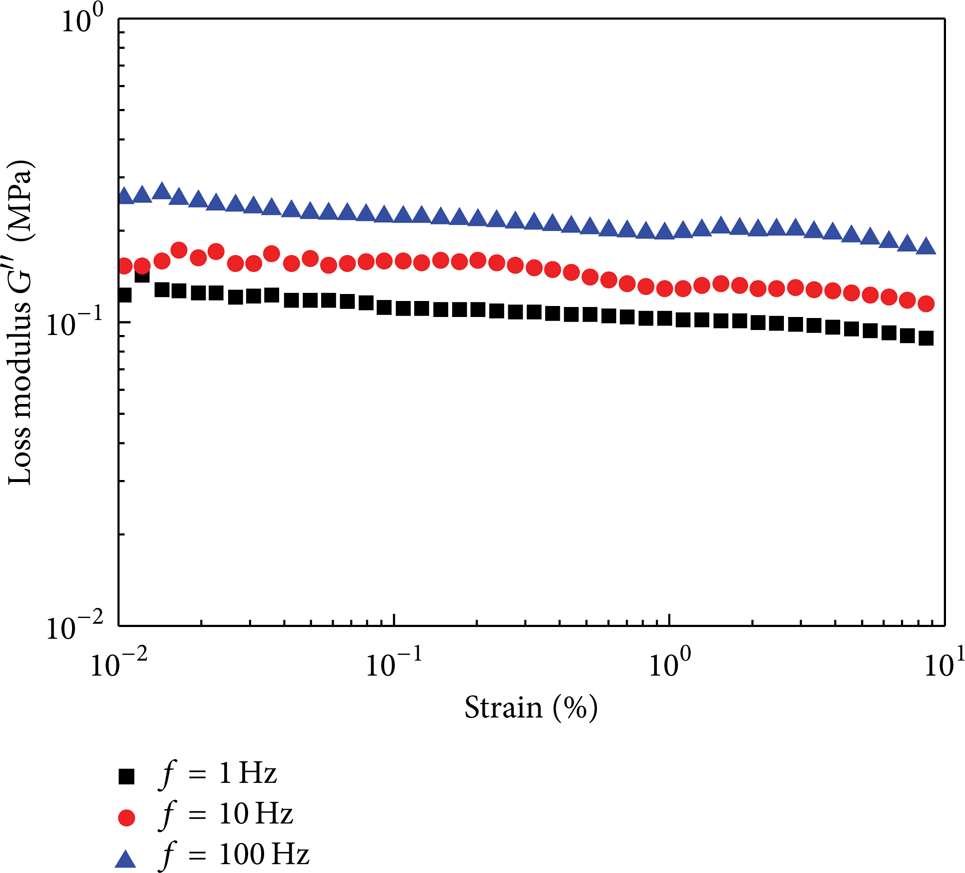
The relationship between loss modulus and strain (H = 156 kA/m).
In Figure 5, loss modulus of MREs is nearly invariable with the increasing strain amplitude and, when higher frequency is applied, the value of loss modulus will increase. Furthermore, this experiment verifies (12) that MREs strain has no effect on the loss modulus.
4.2. Frequency Scanning
When no magnetic field is applied, MREs samples are scanned under different frequencies, and the relationship curve between loss modulus and frequency and that between shear storage modulus and frequency are shown in Figures 6 and 7, respectively.

The relationship between loss modulus and frequency (H = 0).

The relationship between shear storage modulus and frequency (H = 0).
As shown in Figures 6 and 7, the loss modulus and shear storage modulus of MREs increase as the frequency increases, and the loss modulus and storage modulus increase as the CIP volume fraction increases.
Apply the nonlinear least squares fitting to (11) or (12), where η and α are parameters and E m = 0. Considering that 704 one-component RTV silicon rubber is used as matrix material, and, combining property parameters of materials, the shear modulus after curing is about 800 kPa; thus we can obtain E0 = 800 kPa. After fitting, the following parameter results are obtained:

Substitute all parameter values into (11) and (12), and draw the relationship curve that loss modulus and storage modulus of MREs vary with frequency.
As shown in Figures 8 and 9, after the calculation according to parametric constitutive model, the relationship curve that loss modulus and storage modulus of MREs vary with frequency fits well with laboratory data as a whole. In addition, it can be found that, when the particle volume fraction is larger, the curve similarity decreases and the error becomes larger, because, with more particles, the formed ordered structure will be more complicated. In spite of no external magnetic field, no magnetized particles, namely, no magneto-induced modulus change, the sophisticated and closed ordered structure formed by particles in matrix still has a large impact on MREs. However, when no external magnetic field is applied, this model only regards soft magnetic particles as ordinary homogeneous fillers, and promoting and reinforcing effects of chain structures formed by particles on matrix would not be considered.

Fitting curve of loss modulus (H = 0).

Fitting curve of shear storage modulus (H = 0).
4.3. Magnetic Field Scanning
In magnetic field scanning, the relationship curve that storage modulus and loss modulus vary with magnetic-field intensity is shown in Figures 10 and 11.

The relationship between shear storage modulus and magnetic field (ω = 10 Hz).

The relationship between loss modulus and magnetic field (ω = 10 Hz).
As shown in Figures 10 and 11, as the magnetic-field intensity increases, the magnetic force between particles in MREs improves; what is more, the shear storage modulus increases as the magnetic-field intensity is reinforced; meanwhile, as the CIP volume fraction increases, the shear storage modulus of MREs becomes larger and the modulus change is more obvious. Particularly, when the particle volume fraction reaches 34% and 46%, the relative modulus change of MREs (magnetorheological effect) is 5–10 times as large as that of first three groups of samples (with smaller particle volume fraction). However, the change of loss modulus with the increasing magnetic-field intensity is not apparent and can be neglected. So, from Figure 11, the external magnetic field may have little effect on loss modulus of MREs, which satisfies the description of (12).
The shear storage modulus of MREs in magnetic field is mainly composed of the matrix shear modulus and magneto-induced modulus. Apply the nonlinear least squares fitting to (27) and (29), where μ1 = 1, χ = 0.65 [20], A = 1.202, and k0 is the fitting parameter, and obtain the fitting curve as shown in Figure 10.
In Figure 12, the fitting curve basically fits with laboratory data. The parameter k0 denotes the ratio of the distance between centers of two nearby particles to particle radius, and the relationship between its fitted value and particle volume fraction is shown in Figure 13. The parameter k0 value decreases as the particle volume increases, indicating that the magnetic force is stronger when the chain structure formed by particles is closer, as shown in (19). Hence, it also explains why the shear storage modulus of MREs becomes larger as the particle volume fraction increases.

The model curve in which the shear storage modulus varies with the magnetic field.

The relationship between parameter k0 and particle volume fraction.
4.4. Relevant Curves by Numerical Simulations
Relevant parameters fitted in (11) and (12), when there is magnetic field or no magnetic field, as detailed in Table 2, are substituted into (16)–(18), and relationship curves that MREs loss factor, energy dissipating rate, and dynamic viscosity vary with frequency and magnetic field are drawn.
Fitting parameters of MREs with different particle volume fractions.

Figure 14 shows that, when the external magnetic field is zero, the loss factors decrease as the frequency increases, and, as particle volume fraction increases, the MREs loss factor decreases. When the frequency increases gradually, the loss factor of MREs tends to remain constant and is not affected by frequency. In Figure 15, MRE-4 is taken as the example to compare the experimental data with model result of loss factor varying with oscillatory frequency. The variation trend of the model basically fits with the experimental result, but the numerical simulation result is slightly larger than the experimental data. However, the model curve and experimental data tend to overlap with the increasing oscillatory frequency.
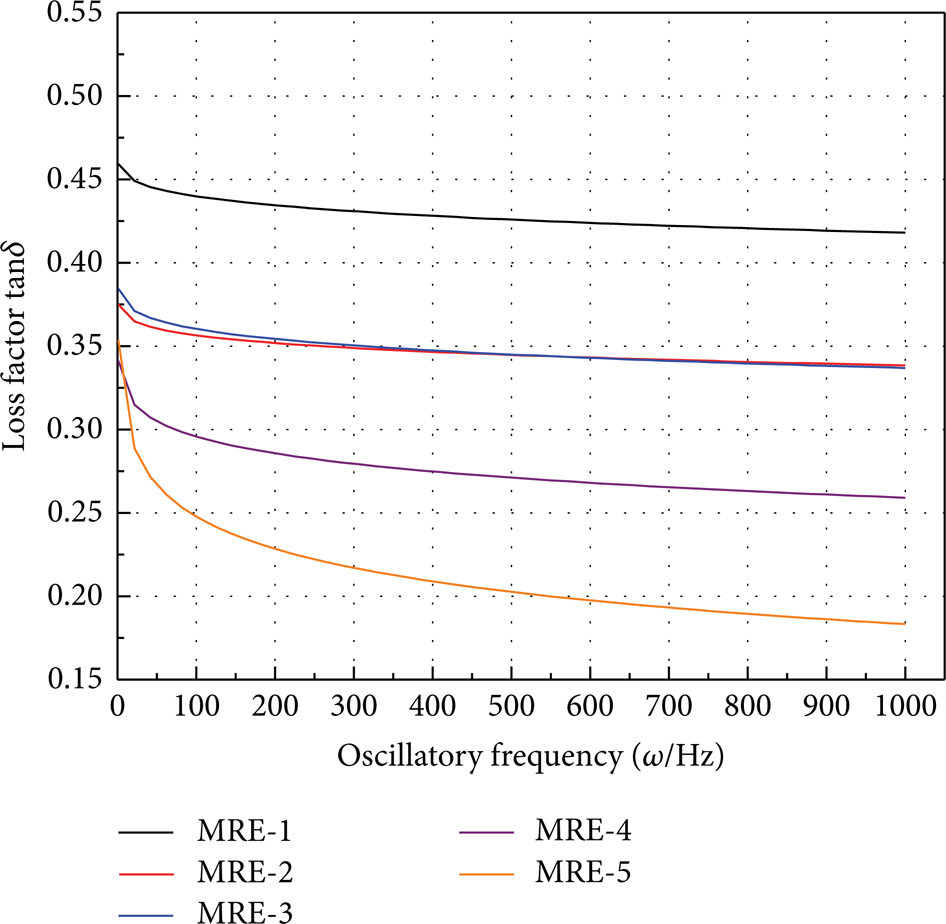
The relationship between loss factor of MREs and frequency when there is no external magnetic field.

The model curve in which the loss factor varies with oscillatory frequency (MRE-4).
Figure 16 shows the changes of MREs loss factor from low frequency to high frequency and from low magnetic field to high magnetic field and indicates that, as the magnetic field and frequency increase, the loss factor decreases continuously. Particularly, when the volume fraction of particles reaches 46%, the curve approximates a plane, indicating that MREs with too high particle volume fraction are not suitable for damping materials, because too much ferrous powder make MREs not “soft” enough and the overall average rigidity is “pulled too high” by too much ferrous powder.

Loss factor of MREs under different driving frequencies and different magnetic fields.
Figures 17 and 18 indicate the relationship curves of MREs energy dissipating rate in unit volume and frequency and magnetic field under different alternating stress amplitudes. Taking the fourth group of samples, for example, as the frequency is larger, the MREs energy dissipating rate in unit volume is larger, but, as the magnetic-field intensity continues increasing, the dissipating rate tends to decrease and finally tends to zero.

The relationship between dissipating rate and frequency (MRE-4).

The relationship between dissipating rate and magnetic-field intensity (MRE-4).
The dynamic viscosity represents the internal friction of matrix materials when damping vibration happens to MREs. At the moment, CIP particles are only equivalent to a kind of powder fillers. The curve in Figure 19 indicates that, as the particle volume fraction increases, the MREs dynamic viscosity increases; and, within the frequency range from 0 to 200 Hz, MREs dynamic viscosity tends to decrease as the frequency increases, and beyond that range the dynamic viscosity remains basically constant and approximates to 0.

The relationship between dynamic viscosity and frequency.
5. Conclusions
In this paper, a parametric constitutive model of MREs in a simple form and with clear physical meaning is proposed, which uses the Abel dashpot element with fractional operator to replace the traditional Newton dashpot element and then connects with linear spring in series to establish the Maxwell model capable of describing MREs basic characteristics. Meanwhile, in combination with magneto-induced characteristics of MREs, the nonlinear spring element is introduced to connect with matrix model in parallel with composing the parametric constitutive model of MREs. Dynamic mechanical characteristics of MREs are studied by this model and relevant expressions of dynamic mechanical modulus are derived. In addition, on the basis of coupled field, a shear model of particle chain based on pressure stress is proposed and used to study the magnetorheological effect of MREs. In order to verify the accuracy of the entire model, five groups of MREs samples based on silicone rubber with different volume fractions are prepared, and the MCR51 rheometer is used to conduct the experiment of dynamic mechanical properties based on frequency and magnetic field scanning. Experimental results reveal that the established model fits well with laboratory data; namely, the model can better describe the relationship between the dynamic modulus of MREs and changes in frequency and magnetic field. Finally, fitting parameters are substituted into relevant expressions, and curves that loss factor, dissipation rate, and dynamic viscosity change with frequency and magnetic field are drawn. According to the results, the loss factor decreases as frequency and magnetic field increase, and, as the volume fraction of soft magnetic particles increases, the loss factor decreases; however, MREs energy dissipating rate in unit volume increases as the frequency increases and decreases as the magnetic field intensity increases; when the magnetic-field intensity reaches 80 kA/m, the dissipating rate tends to 0; the dynamic viscosity of MREs is only related to frequency, which decreases as the frequency increases and finally tends to 0.
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Footnotes
Acknowledgment
The authors would like to thank the Department of Science and Technology of Jiangsu Province of China for financial support under Project BE2012180.