
Abstract
In parallel with steady research and development in ad hoc and wireless sensor networks, many testbeds have been implemented and deployed in real world. Furthermore, some research works have addressed design issues for deployment in three-dimensional space such as sky or ocean. Since many research challenges in three-dimensional spaces have not been explored yet as much as two dimensional spaces, it is required to define the challenging tasks to provide reliable communication in three-dimensional space. In this survey, we aim to identify the unique properties of communication environments in three-dimensional space and address the overview of the state of the art in this research area. To achieve this, the survey is organized according to two good example networks, airborne ad hoc networks (AANETs) and underwater wireless sensor networks (UWSNs). For each network, we introduce and review the related research works to focus on infrastructure, localization, topology design, and position-based routing. Finally, open research issues are also discussed and presented.
1. Introduction
Wireless ad hoc and sensor networks have been experiencing a modernization that guarantees a momentous impact on humanity. Both networks plot many research oriented challenging problems due to essential many special attributes and some obligatory constraints. Efficient communication is probably the most critical issue in wireless ad hoc and sensor networks, because mobile devices are usually moving erratically due to which route breakdown occurred. The infrastructure control techniques grant each wireless device to accommodate its transmission range narrowly and privilege certain neighbors for communication. There exist several infrastructure control techniques such as topology control designs [1–3], localized geometrical structures [4–7], dynamic cluster techniques, position-based routing [8–10], and power management protocols [11, 12]. However, most of the proposed infrastructure control algorithms were only applied to two-dimensional (2D) networks where all nodes are distributed in a 2D plane. In practice, the wireless ad hoc and sensor networks are often deployed in three-dimensional (3D) fields, such as sky space or atmosphere, that is, airborne ad hoc networks (AANETs) and sensor nodes in ocean, that is, underwater wireless sensor networks (UWSNs).
AANETs communication gained attention in the last few years due to its novel research challenges in mobile ad hoc environment. Due to the challenging parameters of AANETs, such as high mobility, limited bandwidth, bounded transmission range, intermittent connectivity, and unpredictable noisy channels, AANETs are considered a harsh environment for communications near researchers. These challenges create different problems in an ad hoc multihop environment mainly congestion, collisions, and transmission delays [4]. Furthermore, it is difficult to maintain the transmission range of any two highly mobile airborne nodes moving in opposite directions at almost very high velocity and hardly have few seconds available to discover, setup, and transfer data successfully.
UWSNs are composed of different kinds of static and mobile sensor nodes to collectively perform monitoring tasks over a 3D space. In UWSNs, sensor nodes communicate with each other via unique characteristics acoustic signals and therefore encounter large propagation delay, high error rate, and multipath effects. Furthermore, Doppler's effect also occurred due to the relative motion of transmitter or receiver with the water current. Besides these communication channel related challenges, UASNs are also energy limited. The energy restricted UWSNs nodes are difficult to supplement energy as underwater nodes are costly to operate. Therefore, to make UWSNs energy efficient, node deployment algorithms need to address the adverse physical channel conditions and water mobility. Thus, infrastructure strategies support many essential network services such as network topology control and routing to increase the network performance. Due to the mentioned challenges, UWSNs call for novel protocols and infrastructures. The network design and management protocols are closely related to the network infrastructure, and various UWSN infrastructures have been discussed in the literature.
Three-dimensional AANETs and UWSNs are used to detect and expose phenomena that cannot be decently realized by means of 2D sensor nodes. New technologies have brought us new ways to explore this boundless uncharted aquatic and space environment. These 3D technologies provided us with a number of applications for scientific, environmental, commercial, and military purposes including pollution monitoring, disasters prevention, facilitated navigation, seaward exploration, and oil/gas monitoring, among others. Due to exclusive 3D flavors such as large delay, low bandwidth, node mobility, high error rate, and harsh environments the existing 2D wireless networks solutions cannot be applied directly to 3D wireless networks. Therefore, while moving towards 3D networks, a number of crucial issues need to be addressed [13, 14]. Although the problem of efficient infrastructure control has been well addressed in 2D literature, its extension to 3D brings several challenges that have not been adequately addressed yet. One important issue is the technologies used in 2D spaces which need modification or extension in 3D networks. Such enhancements are required in different dimension from the mechanism to deal with position information to communication protocols. This modification should not delay or interrupt compatibility with nodes in existing 2D networks. Other research barriers to moving from 2D to 3D are network coverage and deployment. In this paper, we study how to efficiently construct infrastructure for 3D wireless ad hoc and sensor networks to maintain network connectivity for efficient routing.
The rest of the paper is organized as follows. In Section 2, we discuss background information and applications of AANETs and UWSNs. In Sections 3 and 4, we described the detailed design characteristics of both networks. We surveyed and summarized the design requirements and challenges in 3D AANETs and UWSNs, discussed their performances, and pointed out the open issues in Section 5. Section 6 summarized the 3D open research challenges. Finally, in Section 7 we conclude our paper.
2. 3D Wireless Ad Hoc and Sensor Networks Applications
2.1. Network Model
A 3D wireless ad hoc and sensor network consists of a set V having n nodes distributed in a 3D plane
2.2. AANETs Applications
The AANETs is composed of multiple platforms, such as command and control planes, unmanned aerial vehicles (UAVs), ocean interceptors, and ground towers. Mostly, in airborne network all nodes are located in aircraft above the ground which provide air-to-air, surface-to-air, and sometimes surface-to-surface communications. Airborne ad hoc networks have a number of potential civilian, commercial, and scientific applications. Beside these AANETs are also intended for use in aviation communications, navigation, and surveillance. Furthermore, AANETs are considered useful to businesses, private internet users, and government agencies especially the military. Another ease of AANETs is especially at the time of war, where an airborne network might enable military planes to communicate with each other and platoons deployed on ground without a fixed communications infrastructure. Such networks are also useful for civilian aviation to allow civilian planes to continually monitor each other's positions and flight paths. Similar to internet, AANETs also use TCP/IP as the set of protocols for specifying network addresses and ensuring the successful arrival of message packets.
In application scenarios, AANETs require extension in scalability for different operations. If airborne communication network is entirely established on an infrastructure, such as a satellite or a ground base, the operation area is limited to the communication coverage of the infrastructure. In this situation, AANETs node cannot operate if it is out of the range and cannot communicate with the infrastructure. Therefore, new research is focusing that AANETs nodes will be largely based on node-to-node data links instead of node-to-infrastructure data links. This way, AANETs can extend the coverage area of the operation and be able to communicate through other nodes even if ANNETs node cannot establish a communication link with the infrastructure. As discussed earlier, AANETs nodes operate in a highly dynamic environment and therefore topology with ground is changing every second. If network does not allow establishing an ad hoc network, all nodes must be connected to some base station in an infrastructure way, as shown in Figure 1(a). However, during the operation, because of the high mobility and weather condition, some of the nodes may be disconnected with base station. If the airborne nodes support ad hoc network architecture, they can maintain the connectivity through the other airborne nodes, as it is shown in Figure 1(b). Thus such connectivity feature of AANETs enhances the reliability of the high dynamic mobile nodes [15].

AANETs application scenario for reliable communication.
2.3. UWSNs Applications
UWSN infrastructure can be classified into two broad categories, that is, motion and coverage. The motion based category belongs to sensor nodes, such as stationary, mobile, or hybrid UWSNs, where the coverage category belongs to space such as 2D or 3D UWSNs. The sensor nodes in stationary UWSNs are attached to fixed locations surface buoys or ocean floor units and utilized for monitoring a certain region as shown in Figure 2(a). On the other hand, nodes in mobile UWSNs have different mobility characteristics. The mobile nodes such as autonomous underwater vehicles (AUVs) and unmanned underwater vehicles (UUVs) float freely underwater and the motion is controlled by inertial navigation devices as shown in Figure 2(b). In 2D UWSNs, all nodes are assumed to be at the same depth, where in 3D each sensor node may be floating at an arbitrary depth. Furthermore, the high frequency WSNs signals varying from tens of MHz to several GHz values are not straightforwardly used in underwater networks because of their rapidly absorbed nature. Acoustic communications are preferred on radio and optical communications because of the less attenuation acoustic signals than the RF and optical signals [16]. Beside this, the bandwidth also varies according to the range of underwater communications.
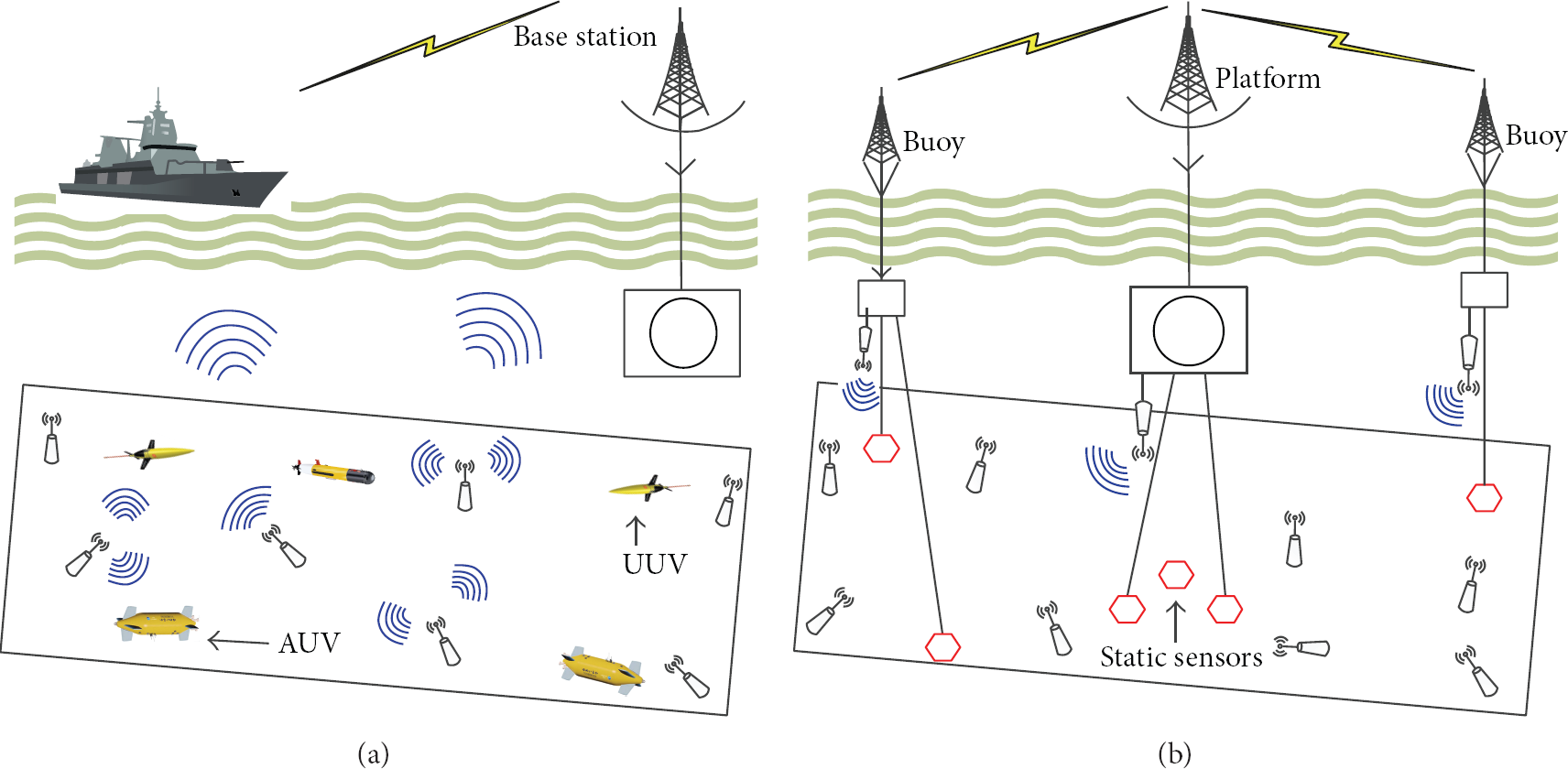
Stationary and mobile UWSNs.
Applications of 3D UWSNs and AANETs include oceanographic data collection, scientific ocean sampling, pollution and environmental monitoring, boundary patrolling, searching and destroy objects, observing different networks, used as a relay for ad hoc networks, ocean climate recording, marine commercial operations, oil exploration, disaster prevention, assisted navigation, and weather management, among others. In a research point of view these applications are roughly categorized into three classes, that is, scientific applications, industrial applications, and defense applications [17, 18]. Due to the vast research area many new applications are emerging; therefore it is not feasible to give thorough list of 3D wireless ad hoc and sensor networks.
2.3.1. Scientific Applications
Scientific applications of 3D UWSNs and AANETs are mainly used to observe the underwater and atmospheric environment for various scientific research purposes. Possible sensing objectives of underwater sensor networks include geological processes on the ocean floor, ocean water characteristics (temperature, salinity, oxygen levels, bacterial, and other pollutant content), and activities of marine animals (microorganisms, fish, or mammals) [17]. Similarly, possible 3D ad hoc networks such as airborne ad hoc networks are used for patrolling boundaries, searching objects, observing positions, weather management, positioning, and relay nodes.
2.3.2. Industrial Applications
Industrial applications of both UWSNs and AANETs are mainly associated with monitoring and controlling commercial activities. Different from scientific applications, industrial applications in these networks usually involve in-control and instinct components. With the increase of the world population there is a huge demand for increasing resources also. Some of the main resources among the demanded are energy and water along with petroleum, natural gas, and water resources. To provide safety and search for new locations the industrial applications of 3D wireless ad hoc and sensor networks play an important role.
2.3.3. Defense Applications
Another outstanding application of 3D networks is defense applications of airborne and ocean which include patrolling or monitoring port and boundaries or ships and unmanned aircraft systems (UASs) in harbors and fields, detecting and removing sea mines, searching and destroying objects, providing communication with submarines and other objects in the open air, and assisting navigation of battle ships or submarines and air planes or fighter planes in enemy areas.
3. Underwater Wireless Sensor Networks (UWSNs)
The first underwater communication was used in the submarine system by the military of USA around the end of the Second World War. Since then continued research over underwater communication and wireless sensor technology has achieved adequate development in physical and link layer techniques, such as coding, modulation, and media access, and matured enough to be used in any type of environment. Due to the enormous bulk of unexplored resources in the ocean environment, there is a demand for new research boundaries in the field of sensors and ocean networks [19]. Thus, 3D wireless sensing transmission through the boundless ocean is one of the permissive achievements of this technology to provide advancement for future ocean-observation systems and sensor networks. In 3D UWSNs, wireless sensors float at different extents in water to inspect various episodes of potential application areas. Therefore, many problems arise with 3D UWSNs that need to be solved in order to enable profitable underwater monitoring in the new surroundings.
3.1. UWSNs Design Characteristics
UWSNs are imagined for stand-alone applications and control of autonomous underwater vehicles (AUVs) as an alternative to cabled systems, such as extensive fibre-optic networks and remotely operated vehicles (ROVs). Thus, UWSNs are generally formed by a collection of ocean floating devices called buoys containing sensors, stationary moorings, surface research vessels, or even coastal radars and large gliders as shown in Figure 3. The sensor buoys can be drowning at different depths and floating together or apart at variable speeds. The sensor nodes utilized in UWSNs may be anchor nodes, unknown nodes, or reference nodes. The unknown nodes are responsible for sensing underwater environmental data. Anchor nodes with known positions are responsible for localizing unknown nodes. There are various methods to provide location information for the anchors. Anchors may be placed at fixed locations and their coordinates may have been preconfigured, or they may have special hardware to learn their locations from a location server, such as the Global Positioning System (GPS), where the reference nodes consist of localized unknown nodes and initial anchor nodes. As discussed earlier, these sensors are aware of their own approximate 3D position. Different types of underwater devices can communicate with each other through various communication techniques to form UWSN, while different types of ocean sensors can perform distinct sensing and monitoring assignments for marine applications [17].

3D wireless ad hoc and sensor networks.
The recent research efforts made both underwater vehicle technology and sensor technology are sophisticated enough to motivate towards the idea of underwater 3D wireless sensor networks. To turn this idea more realistic, however, one must face the problem of underwater communication channels which make adequate and steady underwater communication in UWSNs very challenging [20]. Due to this major dilemma, UWSNs have low communication bandwidth, high error rate, and large propagation delay. The modern underwater communication systems are mostly based on acoustic technology [18]. The acoustic communications offer long range communication irrespective of short range communication techniques such as optical [21], radio frequency [22], and electrostatic communication [23]. The parameters of acoustic communication are also surrounded by different constraints; that is, bandwidth is limited and distance-dependent, multipath propagation is time varying, and low speed of sound [24, 25]. The recent research in underwater communication highlights the major challenges between the different acoustic and radio propagation. The half-duplex acoustic modems are involved in acoustic-conscious protocol design which can provide better efficiency than protocols developed for terrestrial networks.
Due to the above challenges and considerable potential of 3D environment for a wide range applications, ocean sensor network has recently become an extremely hot research area for researchers. The UWSNs demand from researchers to design an innovative network, medium access control, localization, transport, synchronization protocols, and architecture some of which have been discussed in previous studies [16, 26, 27]. Since the design of networks and management protocols is closely related to the network architecture, a number of UWSNs architectures have been outlined in this survey.
4. Airborne Ad Hoc Networks (AANETs)
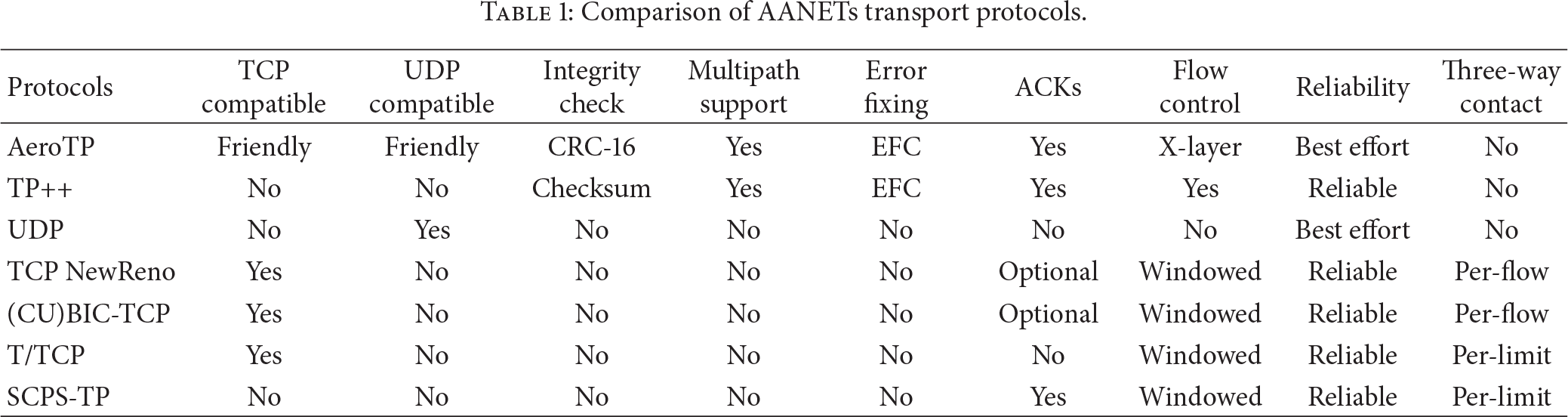
Due to the expeditious technological advances on sensor and communication technologies, it has been desirable to produce 3D wireless ad hoc networks. AANETs are decentralized multihop wireless ad hoc networks formed by highly mobile aircraft nodes connected via long range data links. AANETs could greatly reduce the dependence on ground infrastructure and expensive satellite [28]. All aircraft nodes of AANET are assumed to be equipped with global positioning system (GPS) devices for navigation purposes and are synchronized to a common time reference. A common channel is used for communication between aircrafts nodes in AANET. Furthermore, a global time reference can be used for channel access to schedule collision-free transmissions in a time division multiple access (TDMA) fashion among network nodes. Thus, the MAC protocol provides a TDMA time slot schedule and assignments in a distributed way for the communicating nodes. The TDMA time slots usually include signaling and data slots for exchanging user information and data packets, respectively. Every AANET node is equipped with a uniform circular array antenna capable of transmitting and/or receiving signals simultaneously in arbitrary directions in every time slot. As the AANET nodes are very dynamic and move very fast and independently, therefore the topology has a limited lifetime which needs frequent updating to route data packets towards destinations [29]. Table 1 identifies and compares a number of key features of AANETs transport protocols.
Comparison of AANETs transport protocols.
The self-organizing feature of AANETs could expand the connectivity and extend the communication scope at infrastructure-less areas, such as mountains, deserts, and the sea. An unmanned aerial vehicle (UAV) system is one of the applications of such 3D AANTS, which come under airborne ad hoc networks and can fly autonomously or can be operated remotely in the open boundless atmosphere. These small devices of airborne ad hoc networks have the potential to create new applications and markets in civil domains and remove considerable stress on air traffic control systems. The airborne networks will form an essential part of the global information grid in the future. Because of their 3D visibility, versatility, and comparatively low operating expenses, the management of UAVs promises new ways for both military and civilian applications, such as search operations, border patrol, managing wildlife and wildfire, relay for ad hoc networks, disaster monitoring, and traffic monitoring.
An airborne ad hoc network is the infrastructure that provides communication transport services through at least one node that is on a platform capable of flight. The future intention of researcher regarding airborne ad hoc networks is to expand the global information grid (GIG) to connect the three major domains of combat, that is, air and space. The transformational satellite communications system currently provides connectivity for all communication through space assets. This communication control system will be transferred in near future to the airborne ad hoc networks, a subcategory of 3D AANETs. Thus, the airborne networks are engineered to utilize all airborne assets to connect with space and surface networks to build a seamless communications platform across all domains as shown in Figure 3. The airborne ad hoc network consists of dedicated tactical links, wideband air-to-air links, and ad hoc networks constructed by the joint tactical radio system. Airborne communications relay platform includes periods of the route flying and repeated, stable flight patterns. The relatively large size equipment which requires space availability, such as mounting antennas and installing significant communications equipment is easily done by airborne ad hoc network devices. UAVs offer long endurance and high altitude, which give wide area air and surface coverage and good optical paths to satellites. The mission of an airborne communications relay platform is to be employed as part of and/or support to constellation and/or strike packages.
4.1. AANETs Design Characteristics
3D wireless ad hoc networks are categorized according to their utilization, deployment, communication, and mission objectives. AANET can be defined as a new form of ad hoc network like widely used MANET and VANET in which the nodes are airplane, UAVs, fighter plans, and so forth. The aerial nodes communication must be recognized by the help of an ad hoc network between AANET nodes along with aerial nodes to infrastructure, although many common design characteristics exist between the three wireless ad hoc architectures AANET, MANET, and VANET. But still differences exist between 3D AANETs and other wireless ad hoc networks.
The path stability in AANET reflects in the number of link breakages, which will reinitiate new path selections. Thus, overmuch link breakages will increase the overhead of the whole network and affect the end-to-end delay and packet delivery ratio. AANETs traffic mostly rely on distributed medium access control protocols for coordination and assignment of channel resources among mobile aircrafts. The medium access control protocol plays two important roles. First it provides a signaling mechanism for the communications aircrafts for exchanging information for neighbor discovery and resource allocation in a timely and conflict-free manner, and second it satisfies latency and throughput performance requirements.
5. Design Requirements and Challenges in 3D Networks
The unique requirements of 3D UWSNs and AANETs rise new challenges to the design of topology and localization, characteristics and considerations, and communication and routing protocols for 3D wireless ad hoc and sensor networks. In this section, we present the most dominant and challenging factors that need be addressed in order to achieve effective communication in 3D UWSNs and AANETs.
5.1. 3D Localization
Localization is one of the fundamental tasks in designing 3D wireless networks and generally requires several anchor nodes and distance or angle measurements between these anchors and the unknown nodes [49]. Localization can be used in many tasks of 3D wireless ad hoc and sensor networks, such as event detecting, target tracking, environmental monitoring, identifying raw sensing data, and network deployment [17]. Moreover, localization can also be used by networking protocols to enhance the performance of 3D wireless networks, such as routing packets using position-based routing or controlling the network topology and coverage using geometric methods.
To evaluate the location of an unknown node in 2D wireless ad hoc and sensor networks, we generally use distance or angle measurements between the anchor and the unknown node. On the other side, it is more challenging to locate sensor nodes in 3D UWSNs and AANETs due to various factors. Although various localization algorithms have been proposed for 2D wireless ad hoc and sensor networks, they are not suitable to apply in 3D wireless ad hoc and sensor networks [50, 51]. The well-known used technique for location information, that is, GPS, can work well in open 3D atmosphere but GPS signal does not propagate through water and therefore does not work in 3D UWSNs. Similarly, UWSNs have difficulty with RF signal as it is absorbed by water. Therefore, acoustic signal is usually the best choice in underwater environments for 3D UWSNs. It is also noticed that the 3D deployment of UWSNs requires more anchor nodes to locate nodes in 3D underwater environment.
Recently, a large number of localization algorithms have been proposed for 3D UWSNs. The localization algorithms were classified into two categories, that is, distributed and centralized [36, 52]. The distributed and centralized localization algorithms are based on the location of unknown nodes. These two categories are further divided into subcategories of estimation-based (use current information to compute the location of a node) and prediction-based (predicting the location of a node at the next time instant) algorithms. Reverse localization scheme (RLS) [53] is a 3D centralized localization scheme for mobile UWSNs. RLS is an event-driven localization method triggered by detector sensors for launching localization process. Another range-free localization algorithm with a mobile beacon LoMoB for UWSNs is described in [54]. In LoMoB, the mobile beacon periodically broadcasts a beacon message in the underwater environment containing its location.
5.1.1. UWSNs Localization
Most of the existing localization methods for 3D UWSNs can be classified into different categories by different researchers as shown in Figure 4. Different localization techniques are mainly categorized into two methods, that is, range-based and range-free [17, 55]. A range-based method is based on anchor or reference nodes and includes time of arrival (ToA), time difference of arrival (TDoA), or angle of arrival (AoA) to measure distances or angles between nodes. These distance or angle estimations are further recycled to compute the positions of nodes. However, range-based localization is not suitable in all applications due to the cost and limitations of the hardware on sensing nodes. Therefore, range-free is used as an alternative localization method which includes hop count or areas to locate nodes with less expense.

Localization algorithm classification in 3D UWSNs.
Depending on the mobility of anchor nodes in UWSNs, localization methods can also be categorized into stationary, mobile, and hybrid localization algorithms [17, 53]. In stationary localization algorithms, all sensor nodes are static and attached to surface buoys or ocean floor units having fixed locations. In mobile localization algorithms, all sensor nodes are mobile and freely drift with water, such as AUVs. In hybrid localization algorithms, sensor nodes are both stationary and mobile. Some researchers further grouped these three localization algorithms under centralized and distributed methods. Centralized methods are controlled and operated by center sink or base station which usually collects all kinds of information by underwater known positioned sensors. Where the localization between sensors in distributed methods are performed individually and collaboratively. Thus, to accomplish different requirements of localization in UWSNs, a number of 3D localization methods have been proposed which are summarized in following Table 2.
Summery of existing 3D localization algorithms for UWSNs.

3D wireless ad hoc and sensor networks localization is based on analysis, evaluation, and interpretation of appropriate input parameters. Most of these parameters are related to the physical characteristics being measurable in a direct or indirect way. From the point of physical localization, three basic techniques are followed, that is, signal strength and network parameters, triangulation/trilateration, and proximity. The signal strength and network parameters measures radio network setu, cell id, timing advances in GSM/GPRS, round trip time (RTT) in UMTS network, and time offset information sent from base transceiver station (BTS). These measurements can be used to determine the distance from the mobile node to the BTS to further reduce the position error.
The triangulation technique is the process of finding a distance to a mobile node by calculating the length of one side of a triangle formed by that point and two other reference nodes, given measurements of sides and angles of the triangle as shown in Figure 5. Such trigonometric methods are used for position determination. In the distance based triangulation such as GPS, the position of an object is computed by measuring its distance from multiple reference points. In AoA triangulation nodes uses omnidirection antenna to estimate angle with the help of known reference axis. Furthermore, the proximity technique is based on the place of an object located nearby a known reference anchor or base station. Thus, monitoring and matching the terminal location with the RSSIs from different base stations. Beside this it also monitoring WLAN radio access points to evaluate the terminal and in-range access points.

AOA triangulation in 3D UWSNs.
Figure 6 present a detailed view of underwater projection technique, in which depth information can be employed by three anchor nodes

3D underwater projection.
Multiple localization measurements can be combined with triangulation to obtain position information with respect to a mobile node to be tracked. The commonly used localization techniques to obtain node information are network based, terminal based, network assisted, and terminal assisted. Beside this time calculation is also used by anchor or base station to estimate mobile node position. ToA is a packet forwarding by anchor node to other underwater mobile nodes; simply it is the amount of time a signal takes to propagate from transmitter to receiver. ToA packet consists of time; therefore perfect clock synchronization is needed in nodes. Similarly, TDoA is based on the mobile measurements of the relative arrival times of signals from different anchors or base stations in UWSNs. Figure 7 present the ToA and TDoA techniques for mobile node location estimation. The mobile node in Figure 7 receives signals from three anchors/base stations which need to determine its location. For accurate localization, time synchronization of the different anchors/base stations is essential. This is obtained by a location measurement unit (LMU) at the concern anchors/base stations.
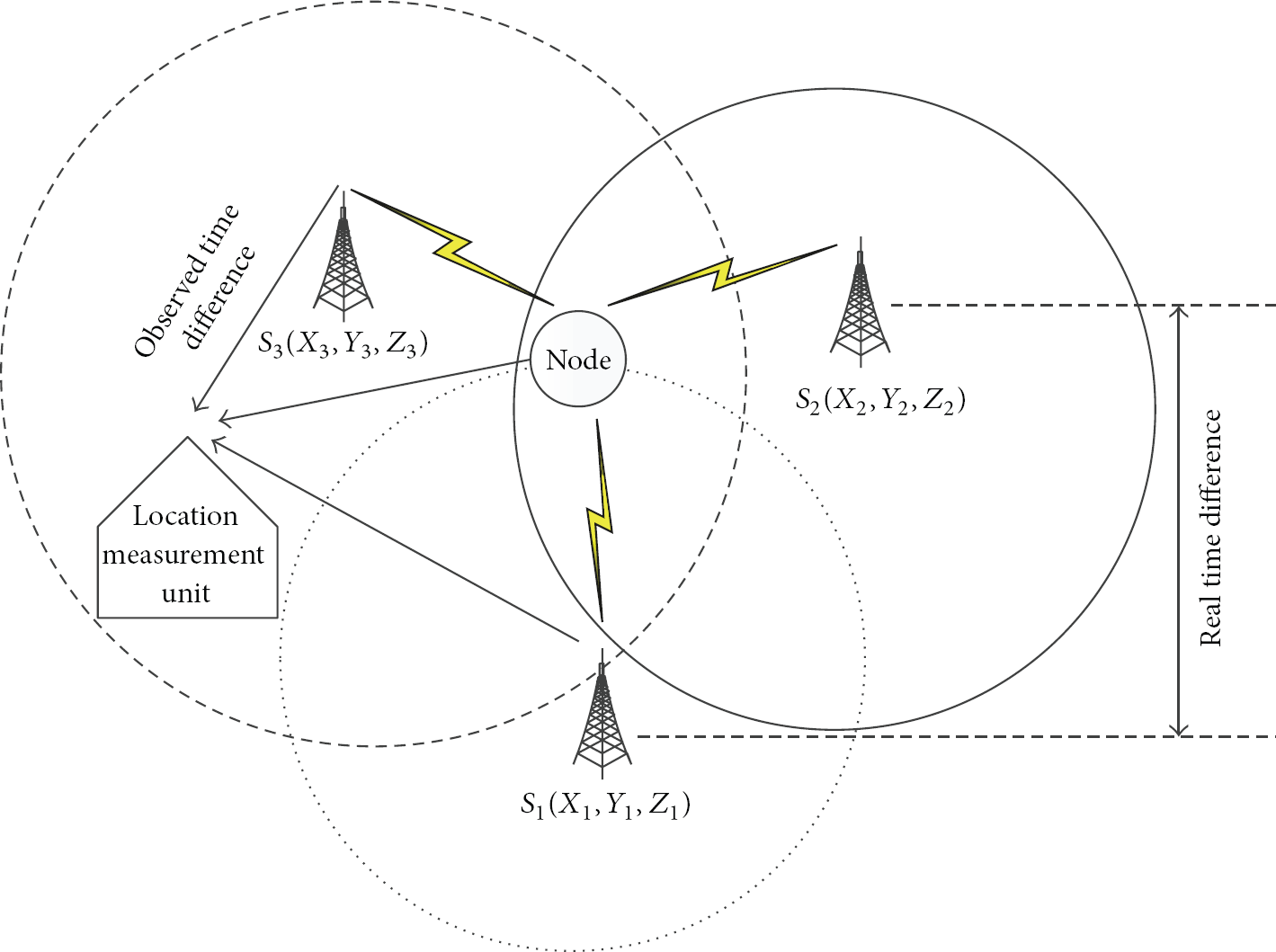
3D UWSNs time triangulation.
Systems which use ToA generally require a complicated synchronization mechanism to maintain a reliable source of time for mobile sensors. The time synchronization difference between the two anchors/base stations is represented by real time difference in Figure 7. Similarly, the observed time difference represents the time difference between the signal received by mobile node and transmitted from the anchor/base station. The propagation time difference between two base anchors/base stations is represented by geometric time difference.
5.1.2. AANETs Localization
Accurate geographical and atmospheric localization is at the foundation of mobile AANETs [56]. Existing localization methods for AANETs include GPS, anchor nodes, and proximity-based localization [57]. In 2D AANETs, the GPS is generally used to receive the coordinates of a mobile communication terminal and is sufficient to determine the location of the nodes. In the absence of GPS anchor nodes or proximity-based techniques can also be used in 2D AANETs. Moreover, for 2D ad hoc networks such as vehicle ad hoc networks, some researchers used assisted GPS (AGPS) or differential GPS (DGPS) by using ground-based reference stations for range corrections [58, 59].
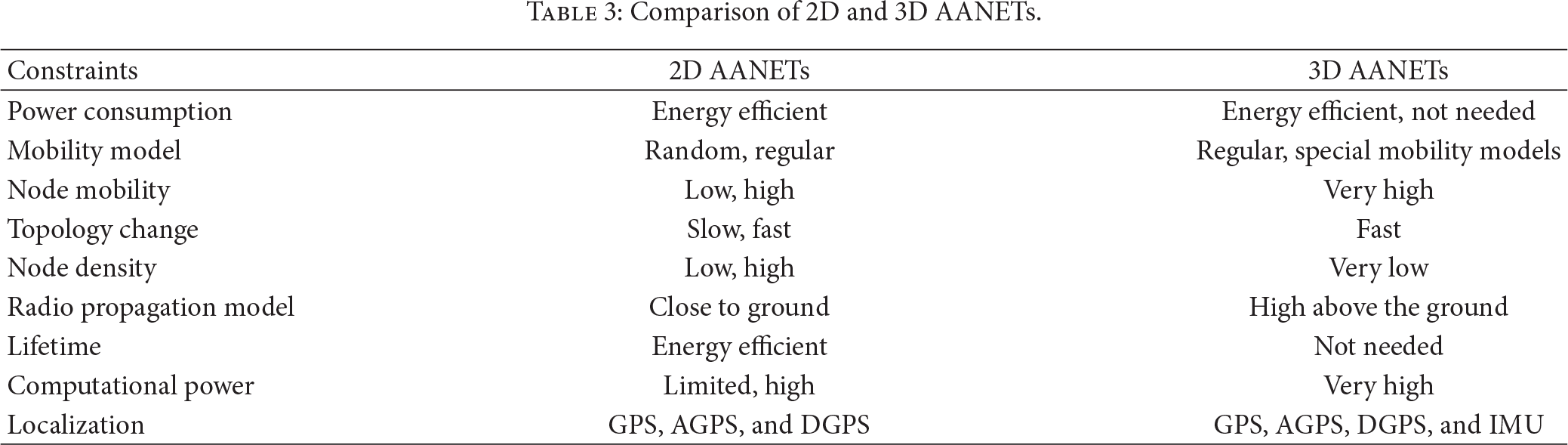
Due to the high speed and different mobility models of 3D, AANET needs highly accurate localization data with smaller time intervals for its applications, such as airborne ad hoc networks and unmanned aircraft systems. GPS provides position information at one-second interval, and it may not be sufficient for certain AANET protocols. In such situation, each AANET device must be equipped with a GPS and an intelligent inertial measurement unit to timely and efficiently judge the position of other AANET devices. Due the above mentioned differences between 2D AANETs and 3D AANETs, we refer to investigate 3D AANETs as a separate localization network. The difference between 2D AANETs and 3D AANETs are outlined in Table 3.
Comparison of 2D and 3D AANETs.
Similar to UWSNs, AoA definition also is applied into AANET. In AANETs AoA is applied to both azimuth and the conical/cylindrical line of sight (LOS) angle. Another angel used in AANETs for localization and targeting is direction of arrival (DoA) which is equivalent to azimuth or AOA when defined relative to a limited level coordinate structure at the current aircraft position. Thus, DoA angle is computed using azimuth or AOA, an estimate of the elevation angle to the target. Figure 8 shows the simplified relationship between AOA and DOA. DoA advantage is the simplification of geolocation algorithm in which the estimation problem can be solved in a plane tangent to earth's surface instead of in 3D space relative to a spherical. The primary advantage of both angles is that it allows a single AANETs node to passively detect, identify, and locate a ground signal source.
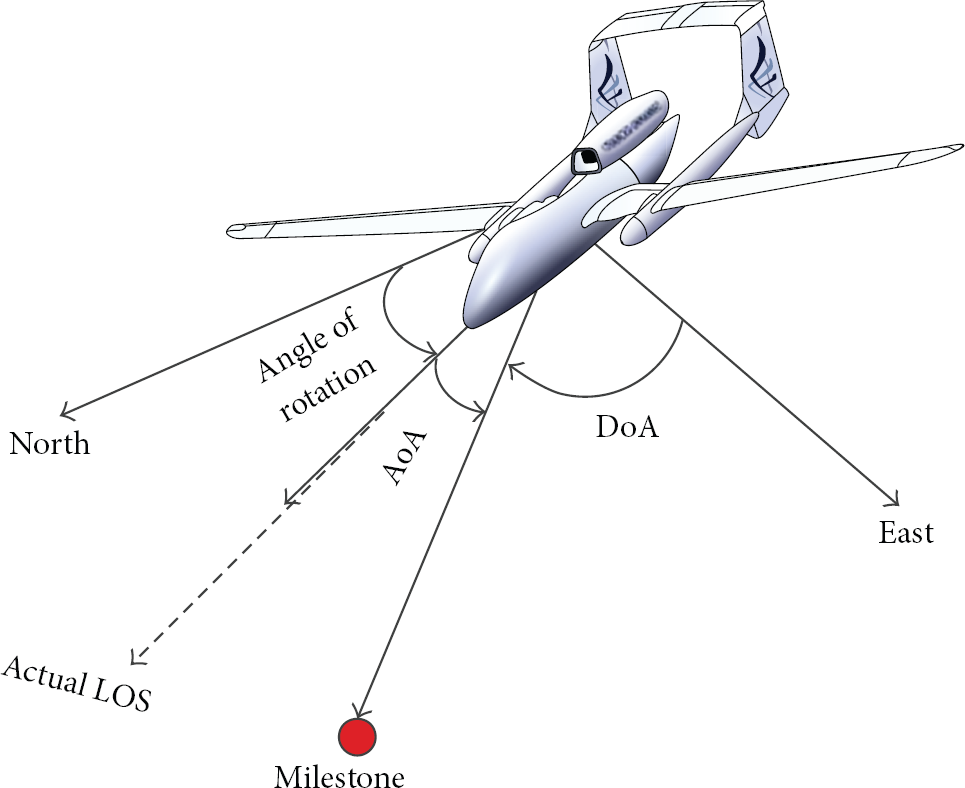
Relationship between AoA and DoA.
Another important component to determine in 3D AANETs nodes is its localization to determine its own position and orientation using onboard sensors or radio links. GPS systems can provide precise position information in open environments. However, GPS is not adequate in situations such as indoor, underwater, and urban environments, because of signal blockage and multipath interferences. Furthermore, the location precision may not be adequate for stand-alone GPS systems. GPS receivers at low heights are more vulnerable to jamming or deceiving from the enemy especially in military environment. In such situation alternative system is required such as inertial navigation system (INS). However, both GPS and INS are subject to build-up of error with time interval and mostly depend on external aid.
The 3D self-localization technique uses 3D AoA measurements, that is, azimuth and altitude from surrounding milestones. AoA measurements are collected from the on-board sensors such as cameras or RF receivers. The 3D localization problem is controlled by six degrees of freedom including three degrees of freedom for sensor position and three degrees of freedom for sensor orientation. The work in [15] formulated the localization problem as one of the minimizing consecutive errors between the estimated line of sight (LOS) and the measured AoA, as shown in Figure 8. Using such error metric, an iterative algorithm is designed to estimate the position and azimuth, followed by iterative orientation and position updates using angle approximation approach. This method is considered efficient due to less number of iterations requirements and therefore publicized to be globally convergent and robust.
5.1.3. Open Research Issues
A lot of differences exist between the 3D localization techniques and the way constraints are constructed and utilized. Therefore, research requires to better utilize the geometric constraint in order to localize the rigid parts of the network. The majority of the localization schemes for 3D AANETs and UWSNs are distributed and estimation-based techniques. Distributed techniques are suitable for applications that require online location information. Furthermore, estimation is more practical since it requires less computation than prediction and easily can be applied into both stationary and mobile 3D applications. On the other hand, prediction-based schemes commonly address localization of mobile 3D AANETs and UWSNs applications. 3D localization techniques also show differences in the ranging methods they employ. Furthermore, majority of the existing localization protocols assume that the localization is performed independent of the other networking tasks. However, operations such as cross layer improve the energy efficiency of the localization in many existing techniques.
5.2. 3D Topology Design
Appropriate and valid network topology is always a direct impact in the design of wireless ad hoc and sensor networks. Network topology varies for different applications and objectives; therefore network topology can be designed according to the requirements. Several topology designs have been proposed in the last decade to control the structures of 2D wireless networks. A localized topology local minimum spanning tree (LMST) [60] is used to estimate the minimum spanning tree and keep the network connected. Similarly, [6] proposed another sparse topology having constant bounded node in/out-degree and constant bounded power stretch factor. A distributed cone-based topology control (CBTC) protocol [4, 7] based on directional information is used to guarantee the global connectivity of the network. All the above mentioned topologies are working very well in 2D wireless ad hoc and sensor networks to provide connectivity. But on the other side very few researchers targeted out topologies for 3D wireless ad hoc and sensor networks. However, 3D environment introduces new challenges to topology design for UWSNs and AANETs in terms of coverage, connectivity, and other constraints. In this section, we discussed the 3D topology control protocols for wireless ad hoc and sensor networks. The topology control protocol discussed in this section cover some hot research areas in 3D ad hoc and sensor networks, such as 3D topology control for coverage, connectivity, and coverage connectivity together.
When considering 3D topology control for UWSNs and AANETs, the first idea that comes to mind is whether there exists any method that apply the 2D topology control on 3D networks. Soon we realize that unfortunately there is no such mapping method which still does this magic. The reason is simple to understand that, in a 2D plane, there is no graph formed by four nodes having same distance between any two nodes. Therefore, simply applying the 2D network topology to 3D networks does not work. Connectivity of the underlying 3D topology enables the wireless nodes to communicate with each other, while at the same time sensing coverage reflects the quality of surveillance. The 3D networks topology design is more difficult compared to 2D networks [61].
5.2.1. Topology Design for 3D UWSNs
If sensors in 3D networks are aware of their positions then the topology design is focusing on how to utilize them to provide full coverage. A self-deployment scheme for 3D UWSNs [62] gives sensor nodes the ability to adjust their depth. Thus in this way the sensor nodes intersection with neighboring nodes reduced and the nodes continuously adjust their depths to improve their coverage. Another distributed 3D space coverage scheme [63] for UWSNs enables sensor nodes to transmit their sensing data packets through the surface buoys antenna. The scheme also finds out an appropriate depth for each node as the sensors can be lowered at any depth due to randomly deployment such that the maximum 3D coverage of the field is maintained. Similarly, [64] also studied the coverage problem for 3D wireless sensor networks with high deployment density by choosing a subset of sensors to be alive and provide full coverage.
Network coverage is essential for being able to monitor and sense any event that occurred in target field. Furthermore, maintaining network connectivity is crucial for gathering and transmitting the sensed data to base station. From time to time different researchers focused on network coverage and connectivity to design a solid topology for 3D environments. The 3D topology problem for both coverage and connectivity was first studied by researchers in [65]. Their topology was a placement strategy based on Voronoi tessellation to create truncated octahedral cells. Later on the researcher tried for k-coverage and full connectivity [66, 67]. In [68], the mechanism to find a subset of sensors in a densely deployed 3D sensor network to guarantee the coverage and connectivity is discussed. Their 3D topology allows sensors to form a 1-covered and connected topology by exchanging messages based on the local information.
5.2.2. Topology Design for 3D AANETs
In order to interconnect AANETs platforms and provide a complete interconnectivity with space and terrestrial networks there are ongoing efforts to develop novel 3D topologies. It is shown in [69] that keeping topology management in a distributed manner can result in higher network capacity and lower energy consumption where each node leads to a higher quality of communication in AANETs. A lot of topology control protocols have been developed for traditional 2D wireless ad hoc networks due to space limitation; we cannot discuss all of them here. But there has not been much research on topology control protocols specific to the AANETs scenario. AANETs are differing from existing 2D mobile wireless ad hoc networks in the ways of topology design. AANETs employ line of sight (LOS) wireless links and the topology of the network might change when the airborne platforms change their position or obstruction occurred between radio antennas which disturb the LOS.
The nodes in AANETs could be exposed to different environments such as intentional jamming, which can have severe consequences on security and routing. Furthermore, each AANETs node can have different radio amplifiers and antennas. Topology controls for such networks are difficult and the designer must need to be aware of the physical layer capabilities at each node. These heterogeneous AANETs nodes and their communication links imply different communication capabilities which results in different error rates and capacities in the presence of unidirectional links. The topology changes generally depending on the higher mobility degree, due to the fast moving nodes of AANETS; the AANET topology also changes more frequently compared to 2D wireless network topologies. In addition to the mobility of AANET nodes, the application such as UAV platform failures also affects the network topology badly. The AANETs node in the sky works as a relay node for other AANETs. Thus, when a UAV fails, all the links that the UAV has been involved in also fail, which results in great failure and needs the whole topology update. As in the UAV failures, UAV injections also conclude a topology update.
5.2.3. Open Research Issues
Topology control for 3D wireless ad hoc and sensor networks has been widely studied recently and different topologies were proposed to achieve the coverage and connectivity of the desired network. Although the nodes are located in a 3D environment in real UWSN and AANET applications, most of the existing studies assume 2D topology structures. The UWSN and AANET studies have shown that the behaviors of different components in 3D environment are totally different from the behaviors in 2D, which can affect the physical topology directly.
5.3. 3D Routing
Another challenging task in UWSNs and AANETs is the efficient routing to delivery sensed data packets from a source node to a destination node via multihop relays. Despite the fact that the actual wireless sensor node deployment is usually conducted in a 3D space, few routing protocols have been designed for efficient data delivery in a 3D environment. Traditional 2D wireless ad hoc routing requires each node to retain a large amount of routing states, which is not scalable for large 3D wireless networks. In this section, we focus on examining and reviewing of different 3D position-based, greedy, randomized, mapping, and hybrid routing techniques to achieve sustainability and scalability in large-scale 3D UWSNs and AANETs.
5.3.1. UWSNs Routing
The traditional proactive and reactive routing solutions had presented in [26] which may not be suitable for a 3D UWSN due to slow propagated acoustic signals. Position-based routing protocols do not need the dissemination of route discovery information and do not maintain routing tables in a node cache. The only information they are using is the local positioning at each node and geometric properties. Therefore, position-based routing is suitable for both 3D UWSNs and AANETs. Although a lot of geographic face routing protocols addressed the scalability problem and provided a guaranteed delivery by routing the packets, their 2D planarization procedure is not applicable in 3D wireless networks. Other connectivity based localization and routing protocols provide alternatives for routing on a 3D wireless network with higher dimensions. However, once again they fail to provide guaranteed packet delivery due to localization errors and inadequate resolution in the coordinate system.
Routing is one of the basic issues due to its backbone role in any network. Most of the UWSNs strategies focused on the physical and MAC layers for routing, where less attention has been given to network layer. Since network layer mainly performs routing task, therefore designing of efficient and practical routing protocols for 3D UWSNs is essential. As mentioned earlier, due to the unique characteristics of acoustic channel and underwater environments, end-to-end routing approaches used in 2D territorial wireless sensor networks are not applicable in the 3D UWSNs. Due to high movement of mobile nodes with water currents, greedy routing protocols are the most promising routing techniques. The greedy forwarding techniques rely on simple forwarding strategy at each hop to transmit a packet to a local anchor or base station. The greedy forwarding approaches also have worst performance especially when data packets reach a node having no neighbor. The existing well-known greedy routing protocols in UWSNs are presented in Figure 9, which are divided into two main categories, that is, location-based and location-free.

Greedy routing protocols in UWSNs.
A hop-by-hop hybrid implicit/explicit acknowledgment scheme [70] is proposed for multihop UWSNs. In this protocol, the downstream nodes forwarded data packets and worked as implicit ACKs for previous transmitted data packets. In epidemic routing (ER) protocol [71] each node replicates a packet to every encountered node. ER utilizes every possible opportunity to deliver a packet to the destination and maximize successful delivery ratio in unconstrained networks. However, due to the high consumption of resources this routing protocol is not desirable in resource-constrained networks such as UWSNs. A geographic approach, vector-based forwarding [72] allows the nodes to measure the benefit before forwarding a packet and reduce energy consumption by discarding low benefit packets.
Focused-beam routing [73] protocol is suitable for UWSNs containing both static and mobile nodes. The objective of this routing protocol is to determine candidate nodes for relaying. Candidate nodes lie within a cone of angle
The acoustic channel is irregular in terms of connectivity and also the available bandwidths are very small. Therefore, it can be better for the sensor nodes to store the data and transmit towards destination when the channel conditions are favorable instead of making multiple transmission or flooding. Most of the routing protocols proposed for 3D UWSNs require some special network requirements. The flooding based greedy routing protocols forward data packets to the neighboring nodes with positive progress towards base station. In order to control the flood, the greedy routing employs location information and links quality of the neighboring nodes to compute the flooding zone at each hop. Furthermore, greedy techniques such as directional forwarding routing consider two angles, that is, current angle and reference angle, as shown in Figure 10. The reference angle is specified by previous forwarder based on link quality. The anchor node compares its explicit angle with the reference angle on the arrival of data packet from mobile node. If the anchor node explicit angle is less than or equal to the reference angle, it simply discards the packet as the mobile node does not lie in flooding zone; otherwise, the anchor node forwards the data packet towards base station.

3D UWSNs packet forwarding.
5.3.2. AANETs Routing
The issues related to node mobility are the most remarkable difference between 3D AANETs and the other 2D ad hoc networks. In AANET, a UAV has a speed of 30460 km/h which means that the nodes mobility degree is much higher than the 2D ad hoc networks. In such situation maintaining connectivity and performing an efficient routing process are great challenging design issue. Similarly, It was proved by different researchers that the use of a typical 2D wireless networks mobility model may result in undesirable path plans for cooperative 3D UAV applications. The most standard and widely used position-based routing is greedy routing. Compared to other routing techniques, greedy routing can be easily extended to 3D environments. According to [13], several routing protocols for AANETs are just variations of 3D greedy routing. To guarantee a data packet delivery using 3D greedy routing is not straightforward and requires much more efforts than 2D greedy routing. Using greedy packet forwarding, the sender of a packet includes the approximate position of the recipient in the packet. For example, node S wants to forward a data packet to destination node D, using the greedy forwarding algorithm node S computes the closest neighbor A that is also the closest to destination D and occurring in its radio range (the dotted circle surrounding S), even though there are other neighboring nodes within
The routing in AANETs is also based on planar graphs where no intersecting edges occurred in graph. A set of nodes in 3D ad hoc networks can be considered a graph where nodes vertices and edges lie between two vertices if they are close enough to communicate directly with each other. Based on the planar subgraph, a simple planar graph traversal is used to find a path from source S toward the destination D. The packet is forwarded on the faces of the planar subgraph progressively towards the destination D. This data traversal is carried out when a packet is forwarded from S to destination D in recovery mode. On each link, the packet is forwarded along the graph using the right hand rule, that is, forward the packet on the next edge counterclockwise from the edge on which it arrived. This scheme ensures a path from source node to destination if at least one path exists in the original nonplanar graph.
Nodes location information based routing strategy can only satisfy the requirements of AANET. Due to the AANET reactive structure, dynamic source routing [76] is developed source nodes to find a path to a destination, only if it has data to send. Proactive, reactive, and position-based routing solutions are compared for AANETs in [77]. It was shown that position-based protocols, such as greedy perimeter stateless routing, outperformed proactive and reactive routing solutions. Another simulation based study [78] stated that greedy geographic forwarding based routing protocols can be used for densely deployed AANETs. Due to the rapid changes in the link quality and very high node mobility, AANET specific routing solutions are developed in recent years.
OLSR based directional optimized link state routing protocol (DOLSR) [79] with directional antenna is proposed for AANET routing. In DOLSR, the sender node chooses a set of multipoint relay nodes to cover two hop neighbors, which not only reduced message overheads but also minimized latency. Geographic position mobility oriented routing (GPMOR) [80] proposed for AANETs predicts the movement of AANETs nodes with Gaussian-Markov mobility model and uses this information to determine the next hop. This protocol provides effective data forwarding in terms of latency and packet delivery ratio. Time-slotted on-demand routing protocol [81] proposed for AANETs is a time-slotted version of AODV routing protocol. In this protocol, only one node can send data packet using dedicated time slots. Although it reduces the bandwidth, it mitigates the packet collisions and increases the packet delivery ratio.
5.3.3. Open Research Issues
Routing is one of the most challenging issues for 3D wireless ad hoc and sensor networks. Due to the unique 3D challenges, the existing 2D MANET and WSN routing solutions cannot satisfy all the 3D requirements. Peer communication is required for collective distribution and collision avoidance of multinodes systems. However, it is also possible to use AANET and UWSN to gather information from the respective environment. All the collected data are routed to a limited set of directly connected nodes. Developing new routing algorithms that can support peer communication and converge cast traffic at the same time is still an open issue. Furthermore, data centric routing is a promising approach for 3D wireless networks. Data centric algorithms make it possible for multinodes systems to support different applications. Data centric algorithms for AANETs and UWSNs are not explored very well.
5.4. 3D Communication Protocols
In this section, the UWSNs and AANETs communication protocols are examined. We survey the existing UWSNs and AANETs protocols proposed for the different layers such as physical layer, medium access control layer, network layer, and transport layer. The physical layer pledges with modulation or signal coding which is the signal transmission technologies. In short the physical layer deals with the data bits, such as the data bits which are modulated to waveforms and transmitted into the air by using an antenna. The extremely high mobility nodes of AANETs place extra problematic issues on physical layer. In order to avoid failure and data lost in data communication architectures for AANET, the physical layer conditions have to be well understood and well defined. The 3D UWSNs and AANETs environment has several challenges in terms of propagation when compared to other 2D wireless networks, such as variations in communication distance, direction of the communicating pairs, antenna radiation pattern, shadowing from the UAV and onboard electronic equipment, environmental conditions, interferences, and jamming.
Similar to other crucial issues, antenna structure is one of the most crucial factors for an efficient UWSNs and AANETs communication architecture. The distance between both 3D networks nodes is longer than typical node distance of 2D networks. Therefore, the communication in both UWSNs and AANETs directly affects the antenna structure. Thus, to overcome this problem more powerful radios can be used, but due to longer distances the problems of high link loss and variation could still arise. One possible way to reduce such unwanted situation is to deploy multiple receiver nodes to enhance packet delivery by spatial and temporal diversity of the wireless channel [29]. 3D UWSNs and AANETs high mobility node not only is creating problems for the above mentioned parameters but also presents new problems for the MAC layer. As discussed previously, due to high mobility and the long distances between nodes, links show instabilities frequently. Such frequent link changes and link outages directly affect UWSNs and AANETs MAC designs, which further creates another design problem, such as packet latency for 3D wireless networks MAC layer design.
To maintain a routing table, as in proactive methods, is not optimal in 3D wireless networks because of the high mobile nodes of UWSNs and AANETs. However, repetitive path finding as in reactive routing can also be exhaustive before each packet delivery. Thus, the routing strategy based on only location information of the sensor nodes can satisfy the requirements of both UWSNs and AANETs. The hierarchical protocols are developed to address the network scalability problem in 3D AANETs. In this type of routing protocols, the network consists of a number of clusters in different target areas. All the nodes belong to some cluster and each cluster has a cluster head within the direct transmission range. The cluster head is in connection with the upper layer AANETs nodes or satellites directly or indirectly as they represent the whole cluster. Furthermore, cluster head can also broadcast data to its cluster members. This model can produce efficient performance when the target area is large, and the number of AANETs nodes is higher. But due to mobility, one of the most crucial design issues for hierarchic routing is the cluster formation.
5.4.1. Open Research Issues
The successful communication of 3D UWSNs and AANETs designs is closely related to the reliability of the communication architecture. 3D UWSNs and AANETs are characterized by highly mobile nodes and wireless communication links with high bit error rates. Both networks have frequent link failures due to the positions of nodes and base stations. To achieve better performance, a reliable communication mechanism is essential specifically in a highly dynamic environment. Thus, reliability is a critical issue for 3D UWSNs and AANETs communication protocols. 3D UWSN and AANET applications use different types of data such as acoustic signals, target images, or video captures of a moving target. UWSN and AANET applications require different reliability levels; therefore novel communication solutions must be developed to address the requirements of different 3D applications.
6. 3D Open Research Challenges
Although the sensor nodes are located in a 3D environment in real UWSNs and AANETs applications, most of the existing studies assume 2D wireless network topology structures. The characteristics of the physical layer affect the design of the other layers and the overall 3D wireless ad hoc and sensor networks performance directly. So a key research is required in the physical layer and antenna propagation for 3D environments. Another challenge is the MAC layer which faces link breakage and poor quality due to the high mobility and longer distances between nodes of the 3D networks. There are very few studies available in the area of MAC layer in 3D environment. Therefore, 3D UWSNs and AANETs call for efficient research on testbeds and directional antennas. Furthermore, location estimation of the nodes and sharing of information are vital issues for directed antenna based MAC layers, and they are more challenging for AANETs especially because of highly mobile nodes, such UAV.
As discussed previously that routing is one of the most challenging issues for 3D UWSNs and AANETs due to the unique 3D wireless networks characteristics, the existing 3D wireless networks routing solutions are limited and have a lot of drawbacks. LOS communication is essential for collaborative coordination and collision avoidance between the nodes of UWSNs and AANETs. Thus, developing novel routing algorithms that can support LOS communication and manage huge traffic is still an open issue. Reliability is a critical issue for 3D wireless ad hoc and sensor networks transport layers. 3D applications use different types of data such as target images, acoustic signals, or video captures of a moving target. These applications require different high levels of reliability. Such reliability is not fulfilling with the existing transport layer protocols.
During the packet delivery in AANETs, the changes of aircraft trajectory will affect the accuracy of routing protocol. Thus, the accuracy of aircraft mobility is very important because all traffic advisories are based on the current state estimates of the aircraft. Clearly, a major challenge in aircraft tracking is thus to provide accurate state estimates of aircraft. However, it is difficult to obtain precise aircraft state estimates when the aircraft changes a flight mode. Due to high speeds nodes, the 3D network is highly dynamic with constantly changing topology. Furthermore, a severe bandwidth constraint occurs in the network, due to the high volume of data that needs to be transfer in a limited allocated spectrum.
7. Conclusion
With the growing 3D applications, new 3D UWSNs and AANETs have been developed and deployed in recent years. Due to the distinctive features of 3D wireless ad hoc and sensor networks and the complex deployment environment in 3D ocean spaces and sky spaces, various efficient and reliable 3D communication and networking protocols have been proposed. In this paper, 3D wireless ad hoc network, AANETs, and 3D wireless sensor network, UWSNs, are surveyed as a separate network family for efficient communication. We properly describe UWSNs and AANETs and present several application scenarios of both networks. Furthermore, we present an overview of the most recent advances in network design principles for 3D wireless ad hoc and sensor networks, with focuses on deployment, localization, topology design, routing design, and communication protocols. We have a strong belief that more promising developments and significant improvements of 3D wireless networks will be achieved in the near future. This will greatly enhance humans abilities in investigation and manipulation of the 3D environment.
Footnotes
Conflict of Interests
The authors declare that they have no conflict of interests regarding the publication of this paper.
Acknowledgments
This work was supported by Basic Science Research Program (NRF-2013R1A1A2A10004587) and the BK21 Plus Program (Research Team for Software Platform on Unmanned Aerial Vehicle, 21A20131600012) through the National Research Foundation of Korea (NRF) funded by the Ministry of Education.