
Abstract
Context. Apart from causing tragic loss of lives and valuable natural and individual properties including thousands of hectares of forest and hundreds of houses, forest fires are a great menace to ecologically healthy grown forests and protection of the environment. Every year, thousands of forest fires across the globe cause disasters beyond measure and description. This issue has been the research interest for many years; there are a huge amount of very well studied solutions available out there for testing or even ready for use to resolve this problem. Aim. This work will summarise all the technologies that have been used for forest fire detection with exhaustive surveys of their techniques/methods used in this application. Methods. A lot of methods and systems are available in the market and for research. The paper reviews all the methods and discusses examples of research experiment results and some market product methods for better understanding. Result. Each technique has its own advantages and disadvantages. A full discussions provided after each type. Conclusion. A full table is provided at the end to summarise a comparison between the four methods.
1. Introduction
Forests are the protectors of earth's ecological balance. Unfortunately, the forest fire is usually only observed when it has already spread over a large area, making its control and stoppage arduous and even impossible at times. The result is devastating loss and irreparable damage to the environment and atmosphere (30% of carbon dioxide (CO2) in the atmosphere comes from forest fires) [1], in addition to irreparable damage to the ecology (huge amounts of smoke and carbon dioxide (CO2) in the atmosphere). Among other terrible consequences of forest fires are long-term disastrous effects such as impacts on local weather patterns, global warming, and extinction of rare species of the flora and fauna.
The problem with forest fires is that the forests are usually remote, abandoned/unmanaged areas filled with trees, dry and parching wood, leaves, and so forth that act as a fuel source. These elements form a highly combustible material and represent the perfect context for initial-fire ignition and act as fuel for later stages of the fire. The fire ignition may be caused through human actions like smoking or barbeque parties or by natural reasons such as high temperature in a hot summer day or a broken glass working as a collective lens focusing the sun light on a small spot for a length of time thus leading to fire-ignition. Once ignition starts, combustible material may easily fuel to feed the fires central spot which then becomes bigger and wider. The initial stage of ignition is normally referred to as “surface fire” stage. This may then lead to feeding on adjoining trees and the fire flame becomes higher and higher, thus becoming “crown fire.” Mostly, at this stage, the fire becomes uncontrollable and damage to the landscape may become excessive and could last for a very long time depending on prevailing weather conditions and the terrain.
Millions of hectares of forest are destroyed by fire every year. Areas destroyed by these fires are large and produce more carbon monoxide than the overall automobile traffic. Monitoring of the potential risk areas and an early detection of fire can significantly shorten the reaction time and also reduce the potential damage as well as the cost of fire fighting. Known rules apply here: 1 minute—1 cup of water, 2 minutes—100 litres of water, 10 minutes—1,000 litres of water. The objective is to detect the fire as fast as possible and its exact localization and early notification to the fire units is vital. This is the deficiency that the present Invention attempts to remedy, by means of detection of a forest fire at the very early stage, so as to enhance or ensure the chance to put it out before it has grown beyond control or causes any significant damage.
There are a number of detection and monitoring systems used by authorities. These include observers in the form of patrols or monitoring towers, aerial and satellite monitoring and increasingly promoted detection and monitoring systems based on optical camera sensors, and different types of detection sensors or their combination.
The following part presents a brief overview of automatic and semiautomatic detection and monitoring systems of fire protection in the world, experience with these systems in practical operation, and their evaluation in terms of efficiency, accuracy, versatility, and other key attributes.
2. Authorities Fire Suppression and Detection Techniques
The most frequently used fire detection and suppression techniques employed by authorities can be summarised as follows:
controlled burning, fire weather forecasts and estimates of fuel and moisture, watch towers, optical smoke detection, lightning detectors which detect the coordinates of the strike, infrared, spotter planes, water tankers, mobile/smart phone calls becoming increasingly common for detecting fires early, and education through Fire Watch or similar schemes for house owners. volunteer reporting-public reporting of fires, public aircraft, and ground based field staff, operational detection systems: fire towers, aerial patrols, electronic lightning detectors, and automatic detection systems.
Detection and monitoring systems are divided into the following two basic groups:
Some of the techniques used in fire suppression include burning dry areas under the management of fire fighters rather than having a crisis later or using flying water tankers like in Canada. Interestingly, others sweep away everything within a planned wide line to surround the fire with a dead end of unfuelled areas like in the Middle East. In some parts of Australia, providing the fire does not harm any humans or properties, it is left to burn, until it dies alone.
2.1. Discussion
Wildfires are high on the political agenda of all the main continents. There are key debates concerning prevention through reduction of forest fuel, managed burnings, and suppression by effectively putting out fires as they occur. Coupled with climate change, resources over the last decade, mainly due to budget cuts and reorganisation of departments, have been focused on “suppression” which in turn allows fuel levels to continue to increase, thus providing the basis for catastrophic fires to occur.
Through contacting a cross section of stake holders and influencers across Australia, Canada, USA, and Europe covering government, forestry management groups, fire chiefs, wildland fire research organisations, international trade association for wildfire, press/conference organisers, insurance trade associations catastrophic events, and sensor suppliers, it actually turned out that each country has many separate organisations, each of them responsible for a certain territory, with its own budget. These authorities’ techniques are based on the probability of human observation or the forecast predictions for forest fires, but it is not a reliable solution that can stop this problem or reduce it. They do not interfere with the fire as long as it does not pose a danger to humans or properties. They believe if they received any warning from public figures, only then it might endanger human life; they do not consider the environmental impact as a priority.
3. Satellite-Based Systems
Earth-orbiting satellites and even air-floating devices have been employed for observation and detection of forest fires. Satellite images gathered by two main satellites launched for forest fire detection purposes, the advanced very high resolution radiometer (AVHRR) [2], launched in 1998, and the moderate resolution imaging spectroradiometer (MODIS), launched in 1999, have been used [3, 4]. Unfortunately, these satellites can provide images of the regions of the earth every two days and that is a long time for fire scanning; besides the quality of satellite images can be affected by weather conditions [5].
3.1. Discussion
Any existing satellite-based observations for forest fires suffer from severe limitations resulting in a failure in speedy and effective control for forest areas. Some of the limitations in an approach based on direct observation of forest fires from geostationary (GEO) or Low Earth Orbit (LEO) satellite are as follows: it might be impossible to provide a full satellite coverage or even intermittent coverage.
Geo and Leo satellites are located on orbits over 22,800 miles above the earth's surface. The optical and the infrared (heat) radiation emitted by flames in early stages, before its spread over a wide region, may be too feeble in intensity to be detected by a satellite. The intensity decreases as the inverse square of the distance, in addition to being sensitive to the angle between the direction of the arriving beam of radiation and normal to the receiving surface-mirror, camera, antenna, and detector; therefore, the position and orientation of the satellite might be far from optimal for detecting a forest fire at an early phase.
The satellite might not be equipped with transponders, antennas, amplification reception, regeneration, frequency translation, and downlink transmission suited for detection of forest fires. In fact, there may not yet be formal allocation of the appropriate frequency and bandwidth for forest fire detection.
A satellite is usually designed to perform many diverse functions (telecommunications, remote-sensing for broad features of the earth's surface or the atmosphere, etc.) and it is not cost-effective to add to it the capability to detect forest fires. The operation of a satellite system is bound by many national and international regulations and agreements and may be less than suitable for the task of forest fire observation.
4. Optical Sensor and Digital Camera
Nowadays, two different types of sensor networks are available for fire detection, camera surveillance and wireless sensor network. The development of sensors, digital camera, image processing, and industrial computers resulted in the development of a system for optical, automated early recognition and warning of forest fires.
Different types of detection sensors can be used in terrestrial systems [6]:
video-camera, sensitive to visible spectrum of smoke recognisable during the day and a fire recognisable at night, infrared (IR), thermal imaging cameras based on the detection of heat flow of the fire, IR spectrometers to identify the spectral characteristics of smoke, light detection and ranging systems—LIDAR (detection of light and range) that measure laser rays reflected from the smoke particles.
The variant optical systems working according to different algorithms designed by the producers, all have the same general concept in smoke and fire glow detection. Simply, the camera produces images every while. The image consists of a number of pixels, where the processing unit tracks the motion in images and checks how many pixels contain smoke or fire glow and then the processing unit sends the results for another algorithm to decide whether or not to produce an alarm for the operator. Most of the optical systems need to be integrated with geographical maps for localisation reasons. See Figure 1.
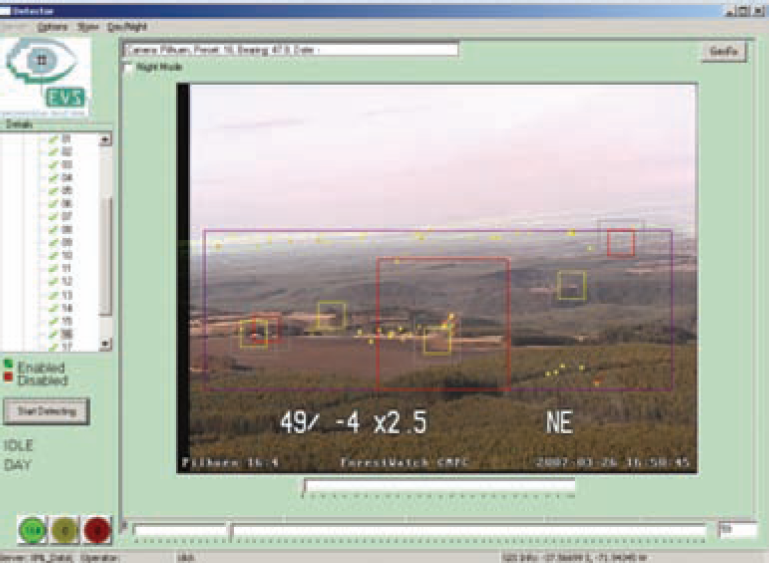
ForestWatch system [9].
Use of a given type of camera or sensor depends not only on the specific conditions of the operation but also on the financial resources available.
AlarmEYE is a video imaging system for forest fires early detection integrated with infrared, black and white and colour frequency detection. Its infrared option can distinguish between flame image and heat vapour. This system was produced and deployed in Thailand [6–8].
EYEfi SPARC. Optical sensors produced by EYEfi, Australia, for forest fire detection consist of
camera (colour during the day and ultralow light gray scale at night), weather station, lightening detection sensor, communication unit (0.25 Mpbs), power system.
Thermal camera or pan tilt zoom cameras can be added to the system. EYEfi does not offer automatic detection of smoke but plans to introduce it sometime in the near future. Simply, EYEfi can provide images for fire agencies whenever the operator notices smoke and can use EYEfi software to use the GIS map and locate the smoke position on the ground. A weather station and lightening detector are included in the system for more accuracy [6, 8].
UraFire system is based on identifying smoke by clustering motions with a time input to reduce the number of false alarms and is used and produced in France [6, 10, 11].
Forest Fire Finder. This optical system has totally different techniques and is a system based on intelligent analysis of the atmosphere instead of detecting the smoke or fire glow. Forest Fire Finder tracks the way the atmosphere absorbs the sun light, which depends on the chemical composition in the atmosphere. Different composition has different absorption behaviour, so Forest Fire Finder can recognise the organic smoke from burnt trees and the industrial smoke in range of 15 Km. The equipment can be installed in tree crowns for faster detection and this system is used in Portuguese forests [6, 12]. See Figure 2.
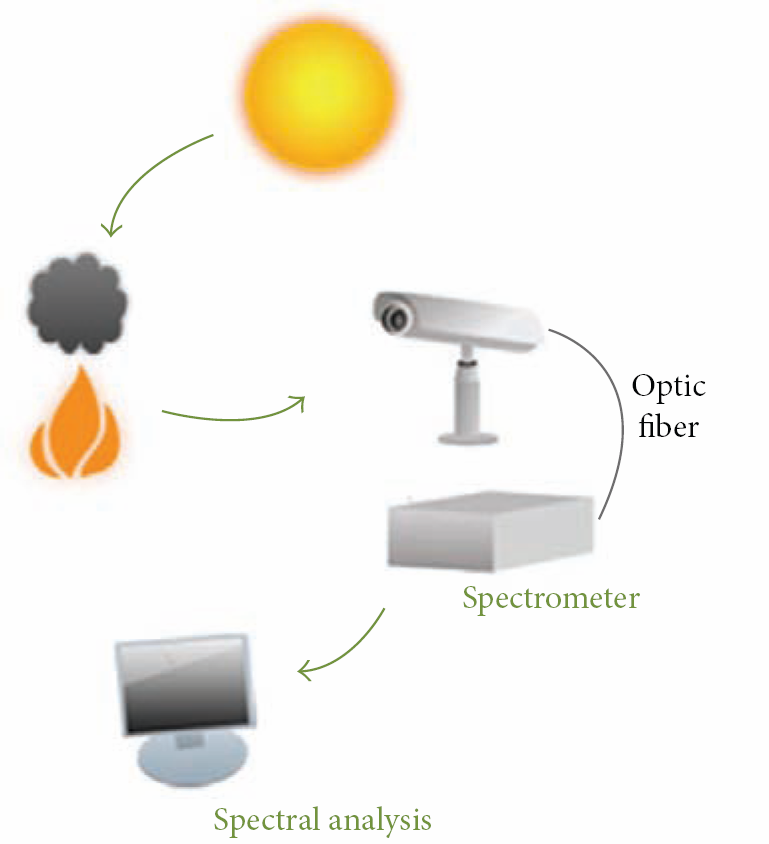
Forest Fire Finder [12].
ForestWatch is an optical camera sensor system which provides a semiautomatic fire detection produced by EnviroVision Solutions, South Africa. A tower camera scans the area for smoke during day and fire glow during night. It can detect smoke in range of 16–20 Km and then report it over 0.25 Mpbs 3G or microwave connections [8]. Forestwatch consists of [9]
a Pan tilt camera to allow a 360° rotation and +33 to −83 tilt from horizon, with 24x optical zoom, image sampling engine, communications system, such as 3G, microwave, or satellite, ForestWatch software to process the received data and produce sufficient evaluation for the operator to make the final decision.
Schroeder (2004), in his article “Operational trial of the FireWatch wildfire smoke detection system,” argued that the microwave links are inexpensive and do not require a licence. However, these systems require a very high line of side transmitter and receiver every 50 Km. Schroeder suggested that satellite connection might be more effective and cheaper [13].
ForestWatch is the most popular system in forest fire detection and only Canada has a documentation test. ForestWatch performed adequately in this test: fires were reliably detected up to a 20 km range but false alarms were also generated. Operational Forest Watch systems are in use in South Africa (83 towers), Swaziland (5 towers), USA (22 towers), Canada (4 towers), Chile (20 towers), and Slovakia (4 towers). A pilot scale operation (two towers) is installed in Greece. The related Harbour Watch system has been deployed in South Africa and Namibia [8].
FireHawk. A risk management system which provides fire location consists of the following three layers [6]:
imaging layer represents installing cameras on suitable places, communication layers set up the wireless link, machine vision layer is the layer where FirHawk uses the ForestWatch software and GIS to provide a location and the shortest path to the fire.
Currently, Firehawk is installed in two areas in South Africa [14].
FireWatch is an automatic smoke detection system which can identify smoke within a range of 10–40 km. It has been studied for years (since 1992) in Germany, and now it is produced by German Aerospace Institute (DLR).
Operational FireWatch systems are in use in Germany (178 towers, 22 control rooms), Estonia (5 towers, 1 control room), Cyprus (2 towers, 1 control room), and Mexico (1 tower, 1 control room). Pilot scale systems (1 or 2 towers) are in use in the Czech Republic, Portugal, Spain, Italy, Greece, and the USA [8].
FireWatch system overview is as follows [15].
Optical sensor system (OSS): each OSS rotates 360 every 4 to 6 minutes in day time and 8–12 minutes during the night in 10 degree steps. Data transfer: OSS at the tower has a wireless connection to the officer computer. Central office: the forest workers are provided with work space (computers, monitors, and printer). See Figure 3.

FireWatch [15].
If the sensor detects a cloud or a column of smoke, the information is transmitted to a central forest fire control office via ISDN (64 bits) or radio transmission of 1 Mpbs; it can be transmitted over 3G but not recommended [8].
4.1. Discussion
Two systems are considered relevant for a real employment in conditions in most of the European countries FireWatch and ForestWatch. Both systems have a long-term development and are still being improved; both of them have been tested and commercially used in many countries around the world.
A very interesting report was produced by the Australian government in collaboration with the Bushfire Cooperative Research Centre on Australian experience of three optical systems for forest fire detection. They designed a project to test the performance of each one of the three optical sensor systems compared by human staffed observation tower performance. Mathews et al. [8] produced a full report about the project details, tests environment, experiment results, and analysis.
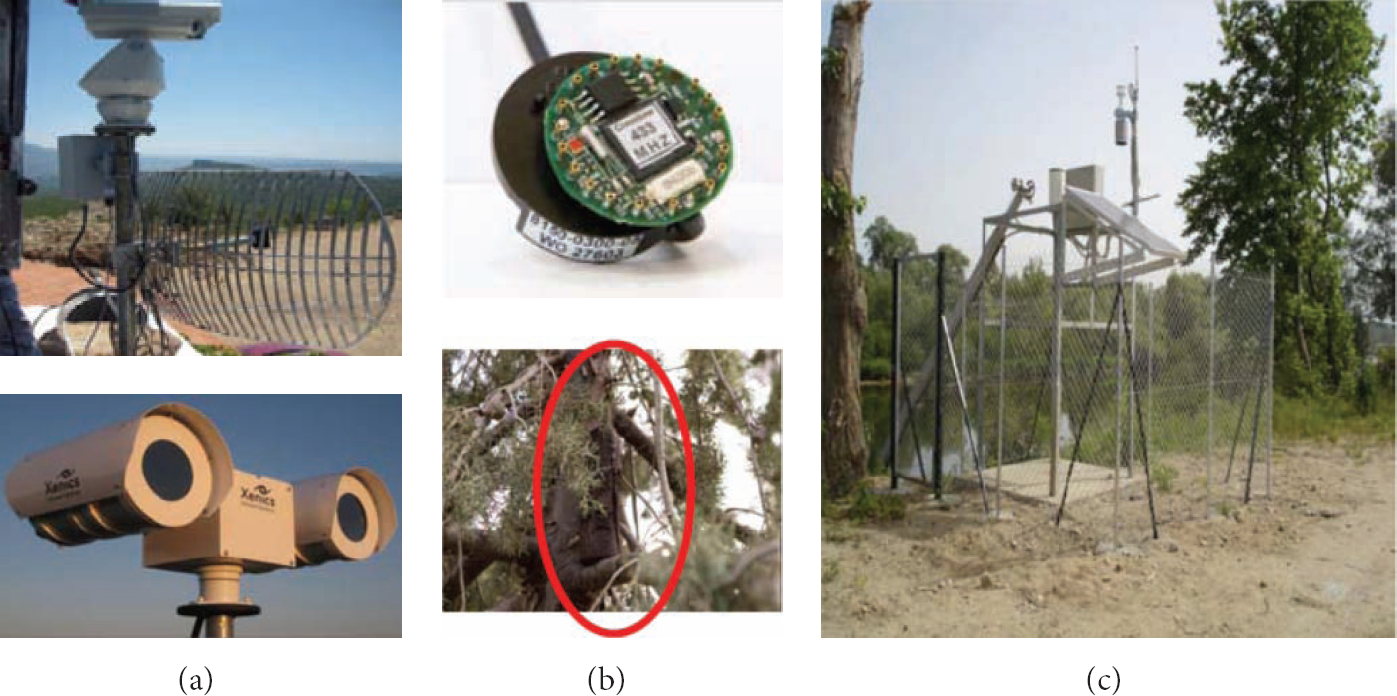
The three systems are EYEfi, FireWatch, and ForestWatch, all of which had been tested on three types of fires: research burning, private burning, and agency burning in Tumut in NSW and Otway Ranges in Victoria in 2010. See Figure 4.

Tower in Tumut, Australia, with the three systems [8].
Some of the results explored by Mathews et al. [8] on the NSW tests are shown in Table 1 as follows.
Over 250 private fires (mostly agricultural burning off) occurred across the study areas. The camera systems reported many fires but in comparison with tower observations in NSW a high proportion of private burns were not reported. 37 prescribed fires and burn-off fires were conducted as part of normal land management tasks during the postfire season burning period by Forests NSW, NSW National Parks and Wildlife Service, and Victorian Department of Sustainability and Environment. One unplanned bushfire was reported in Victoria and none in NSW.
Mathews et al. claimed in their report that all the systems detection was slower and less reliable than a trained human tower observer and it is not possible to rely on cameras only. However, it might be useful to use these systems as tools to improve the tower observer's performance or in remote un-staffed towers.
NSW tests.

They argued that FireWatch was better than forest watch in fire detection reporting where FireWatch was the only camera system to report any of the forest burns, although the detection was 35 minutes later than the observer detection and the fire was 5 times larger. Furthermore, they pointed out that the detection performance was partially a function of fire size and distance from camera; large burns were detected at long distances (70 Km) while moderate burns (10–20 km) were missed.
They stated that the three systems have small localisation error percentages. The cameras are unable to take the topography of the land into localisation calculations. The causes for that are shown in Figure 5.
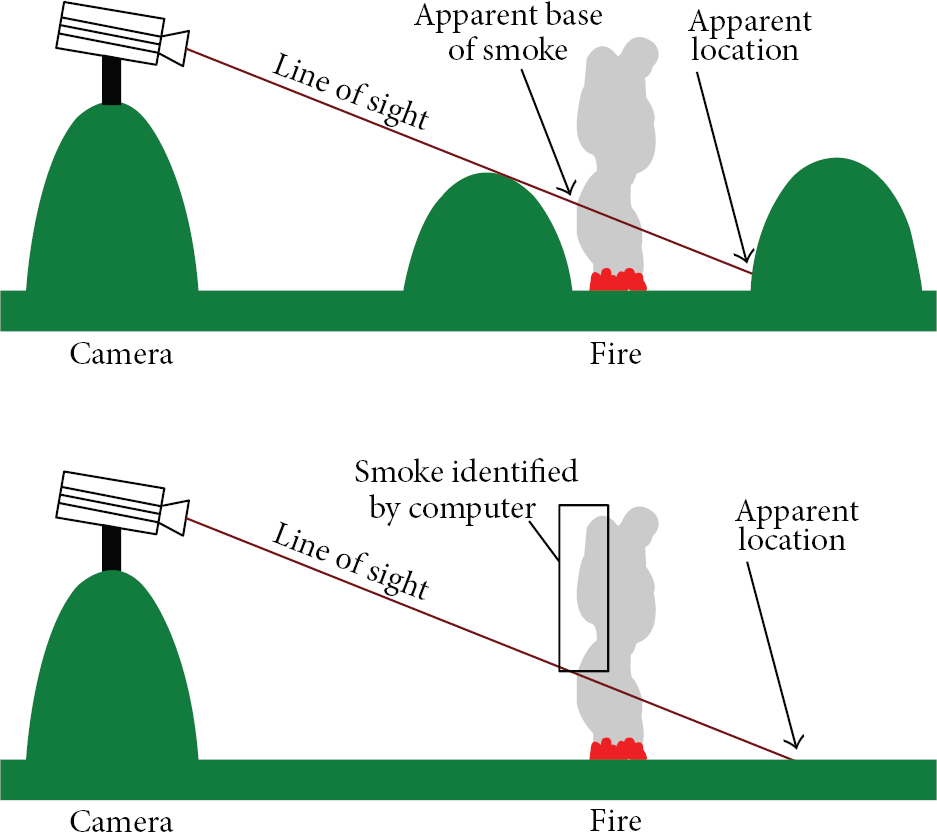
Localisation error reason [8].
They concluded the report with the following points.
Cameras are very likely to perform worse than human observers; they are not suitable replacements for human tower observers. Human observers and the three systems were tested to report forest fires by detecting a column of smoke, where it required a long delay from the ignition moment to produce noticeable smoke that can be detected by human or sensor cameras. Atmospheric conditions, landscape appearance, and smoke characteristics were in different parts of the world.
Optical sensors or camera systems in general need to be improved in order to reduce the number of false alarms due to various dynamic phenomena such as wind-tossed trees, cloud shadows, reflections, and human activity. The difficulties of processing landscape images are due to their varying nature and to the large number of dynamic events that may appear under various illuminating conditions depending on weather, distance, time of day, masking objects, and so forth. These events produce dynamic envelopes, which are not always caused by motion, and consist of time-varying gray levels of connected pixels in several image regions.
This kind of technology only provides a line of sight vision, where high trees or the hills and mountains can block the vision; plus, it might be impossible to provide images for the point of ignition. Optical systems were designed to cover large areas with a minimum number of camera towers; each tower has to detect smoke in range of 15–80 Km, where it requires a long delay after the ignition to produce a watchable smoke cloud that can be detected by the camera. Weather condition and night vision reflect on the camera performance.
Camera surveillance systems with short distance links were tried, but this also proved an ineffective method for fire detection in regard to the need for manual installment for each camera in an appropriate position rather than the line of sight images, night images, bad weather image problems, and high possibility of false alarms because of the following:
daily motion of the sun, moving clouds, variation of atmospheric extinction, vegetation.
Finally, these systems are very expensive; the camera tower can be worth more than thirty thousand dollars per tower, and there is a need to build these towers and install a communication infrastructure in the remote areas inside the forests.
5. Wireless Sensor Networks
The line of sight and the early stage of the fire process problem could be solved with the second type of sensors. A new technology called wireless sensor network (WSN) is nowadays receiving more attention and has started to be applied in forest fire detection. The wireless nodes integrate on the same printed circuit board, the sensors, the data processing, and the wireless transceiver and they all consume power from the same source batteries. Unlike cell phones, WSN do not have the capability of periodic recharging. The sensors are devices capable of sensing their environment and computing data. The sensors sense physical parameters such as the temperature, pressure and humidity, as well as chemical parameters such as carbon monoxide, carbon dioxide, and nitrogen dioxide. The sensors operate in a self-healing and self-organising wireless networking environment. One type of wireless technology is ZigBee which is a new industrial standard based on IEEE 802.15.4. This technology emphasises low cost battery powered application and small solar panels and is suited for low data rates and small range communications. Wireless sensor networks have seen rapid developments in a large number of applications. This kind of technology has the potential to be applied almost everywhere; this is why the research interest in sensor networks is becoming bigger and bigger every year.
Forest fire detection and prevention are another real problem faced by a number of countries. Different methods for monitoring the emergence of fires have been proposed. The early methods were based on manned observation towers but this technique was inefficient and not entirely effective. Subsequently, camera surveillance systems and satellite imaging technologies were tried but this also proved ineffective at being able to efficiently monitor the initial start of the surface fire. For example, camera networks can be installed in different positions in the forests but these provide only line of sight pictures and may be affected by weather conditions and/or physical obstacles.
The revolution of WSN technology in recent years has made it possible to apply this technology with a potential for early forest fire detection. These sensors need to be self-organised and follow an efficient algorithm, interfaced with other technologies or networks. A number of studies have considered using WSN in wood fire systems.
Lloret et al. [16] suggested deploying a mesh network of sensors provided with internet protocol (IP) cameras in Spain. Here, the sensors detect the fire at the beginning and send an alarm signal to the sink. The sink then sends back a message to switch the closest camera “on” to provide real images of the fire and avoid false alarms. Their paper is based on testing the performance of four IP cameras and their energy consumption. The problem with this system is that the transfer of images is a heavy load for wireless sensor networks in relation to their limited resources of power, memory, and buffer rather than IP cameras which can only provide a line of sight images and are not efficient in dark and in foggy and raining weather. IP cameras require installing each one of them manually in the appropriate position.
Son et al. [17] propose a project for fire detection in South Korean Forest Fire Surveillance System (FFSS) using wireless sensor networks connected to the internet. They used a MCF (minimum cost path forwarding) as a routing protocol, which required a routing table for each node to find the minimum path to the sink. General information about the network architecture was provided in their paper. Sensor nodes sense the temperature, humidity, and illumination to forward it to the base station node and then to the gateway. The gateway is connected with a middleware and web application database to create some calculations based on daily humidity records in order to evaluate the hazards of the fire. Son's network is a scalable and real-time system, but their paper is more concerned with fire calculations and decision making than the network communication reliability. They did not discuss the network coverage and sensors distribution or fire localisation issues.
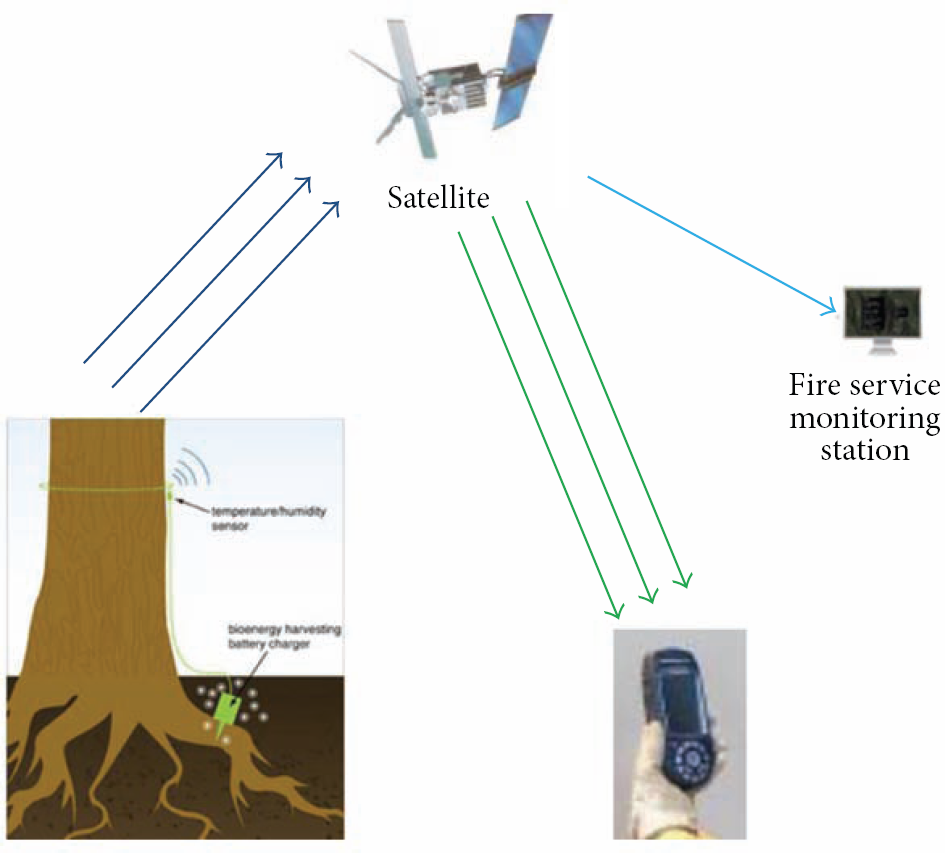
Hartung et al. [18] in their paper present FireWxNet, a multitiered portable wireless system for monitoring weather conditions in rugged wildland fire environments. They used wireless sensor network for wood fire detection as a hybrid with web cameras. The main target of their studies was to investigate fire behaviour in forests rather than detecting fire in early stages. They used wireless sensor network to provide data for weather status and web cameras to provide images for the fire. FireWxNet provides the fire fighters with the ability to measure fire and weather conditions. The system uses a tiered structure which starts with directional antennas on the top of mountains and ends with multihope sensor network to observe the required environmental parameters. Hartung et al. stated that they used web cameras to provide vision data as well and that they equipped the sensors with a small GPS device to provide the location information. See Figure 6.

FireWxNet [18].
Doolin and Sitar [20] experimented a network of 10 Crossbow Mica2 mote sensors operated by TinyOS operating systems written in nesC language. The motes were provided with GPS devices and tested on grassy areas, about ten/acre to sense temperature and humidity pressure and send this data back to the base station. The base station was connected to a MySQL database and clients for alarm monitoring. The problem with this system is that the distance between sensors is too far (approximately 1 km); in case of node failure, a connection between some sensors and the sink might be lost and that could leave a gap in the network coverage; plus, adding a GPS device to each sensor will make the network more expensive and reduce the network life time as a GPS will consume more power. Furthermore, in Doolin's project, each node has to be installed and fixed manually and this is almost impossible for large forests.
Aslan [5] proposed a good fire detection framework which consists of
Sensor deployment scheme: represented in the distance between sensors, minimum collision, and minimum number of sensors deployed with full coverage. Network architecture: the cluster scheme used as network topology. Intracluster communication protocol: the communication between nodes and clusters divided into: initialisation phase, risk free phase, fire threat phase, and progressed fire phase. Nodes enter or change their phase according to danger rate calculation, which depends on NFDRS (National Fire Danger Rating System), temperature, and humidity ranges. Intercluster protocol: the main target for this protocol is the power balancing for cluster heads. Fine Fuel Code (FFMC) represents the litter and fine fuels for 2 cm deep. Duff Moisture Code (DMC) represents moisture content of decomposing organic material for 5–10 cm deep. Drought Code (DC) represents the moisture organic content for 10–20 cm deep. See Figure 7.
Hefeeda and Bagheri [19] present a very smart system. They based their network action on fire weather index (FWI). This index includes the probability of fire ignition and fire spread rate as well. FWI provides the moisture content in relation to weather observation and the fuel codes which is divided into the following three types to describe the soil content of forest ground.
Hafeeda's system required a lot of work before deploying the network. It required a long analysis of the forest surface component in the forest's different parts to understand how to build the fuel code model for this area. Their work is more concerned with weather and fuel modelling for fire danger assessment than the network and coverage issues.
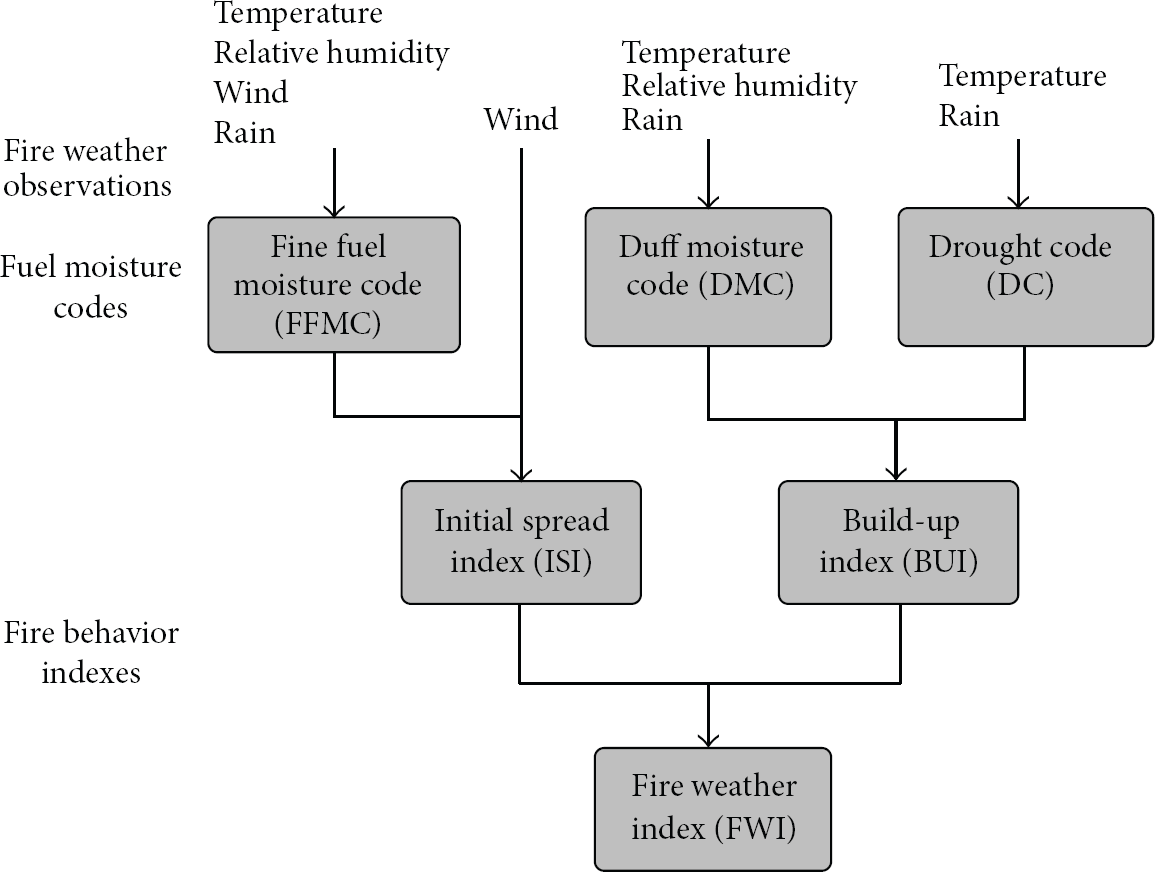
FWI system [19].
Conrad et al. [21] produced a business case for the Enhanced Forest Fire Detection System with a GPS project in Pennsylvania. They claimed that forest fires damage 2,554 acres per year in Pennsylvania, which causes economic loss and potential loss of human life and environment. They proposed to create a fire detection system using fire sensors and GPS devices instead of the present fire detection systems such as the public phone lines, fine look-out towers, and ground or aerial patrol. They claimed that these techniques were outdated and it is time to use the technology for this problem. They targeted two aims for this project: (a) to use the already existing technology and (b) replace all the existing fire detection techniques with more efficient ones.
Conard et al. planned to purchase the GPS handheld devices and radio wave sensors, where the sensor reacts to a fixed temperature by transmitting signals to the GPS system. Each signal would carry the devices unique identity code to increase the system efficiency and allow the system to identify the position. The project planned on installing 12,000 units within forty-eight months, 4,000 devices every 12 to 15 months. When fire or smoke was detected, the sensor would send a signal to GPS satellite, and then the GPS satellite would duplicate the signal to the handheld GPS device and the central monitoring database to display the fire location on the installed map for that area. See Figure 8.
Pennsylvania project [21].
It looks like a very interesting work; unfortunately, the file does not contain any results or proof of the project efficiency. The project expenditure is very high as they have to install each one of the units manually after they finalise the configuration and calibration. GPS devices consume more energy and reduce the nodes life time.
The researchers defined more than 27 mathematical models to describe the fire behaviour where they stated that those models developed according to different countries experience of forest fire and each model is different according to the input parameters and the environments nature (fuel indexing [22, 23]). The researchers of forest fires manage to use some of these models in simulations or even create their own methods to create maps that can be used to analyse the fire behaviour at any time in the future so that they can help the fire fighters to determine the best method to extinguish the fire, such as BehavePlus, FlamMap, FARSITE, Geodatabase, and ArcSDE. On the contrary, researchers are trying to initiate a reliable technology that can detect the fire, localise the fire, and help in decision making in terms of requiring an immediate reaction in case of crisis possibility or a high fire risk situation. As a result, the fire can be extinguished in early stages within a short time to minimise the damage save lives, environment, fire fighter equipment, time and effort.
Hongye et al. [24] in their research of forest fire in inner magnolia discussed a very smart structure for the system which is divided into monitoring system of the forest fire, database system of information management, and decision making system of management of the forest fire proofing. Where the monitoring system at the end provides a quick location for the fire by simulating the fire in 2D map, images come from the field used into 3D maps by using Geodatabase and ArcSDE programs for fire simulation. Although the logical architecture is smart, this system is not easy to build and image observation is not the smartest method for fire detection and simulation.
Ngai et al. [25] provide a general reliability-centric framework for event reporting in wireless sensor networks which can also be used in forest fire detection systems. They consider the accuracy, importance, and freshness of the reported data in environmental event detection systems. They present a data aggregation algorithm for filtering important data and a delay-aware data transmission protocol for rapidly carrying the data to the sink node.
Wenning et al. [26] propose a proactive routing method for wireless sensor networks to be used in disaster detection. The protocol is developed to be aware of a node's destruction threat and it can adapt the routes in case of a sensor node's death. The method can also adapt the routing state based on a possible failure threat indicated by a sensed phenomenon.
García et al. [27] present a simulation environment that can create a model for a fire by analysing the data reported by sensor nodes and by using some geographical information about the area. The use of topography of the environment distinguishes the study from some other solutions. The estimation of the spread of a fire is sent to handheld devices of fire fighters to help them in fighting the fire in field.
FIRESENSE (Fire Detection and Management through a Multisensor Network for the Protection of Cultural Heritage Areas from the Risk of Fire and Extreme Weather Conditions, FP7-ENV-2009-1-244088-FIRESENSE) [28] is a Specific Targeted Research Project of the European Union's 7th Framework Programme Environment (including climate change).
The FIRESENSE FP7 project aims to implement an automatic early warning system to remotely monitor areas of archaeological and cultural interest from the risk of fire and extreme weather conditions.
FIRESENSE is a very complicated system; it consists of multisensors, optical, IR, and PTZ cameras in addition to temperature sensors, and weather stations. In this system, each sensor collects the data and applies some processing techniques and different models and data fusion algorithms in order to provide a clear understanding for the event to the local authority. Demonstrator deployments will be operated in selected sites in Greece, Turkey, Tunisia, and Italy. See Figure 9.
FireSense system [28].
This project builds on very complicated scientific models, algorithms, concepts, and comparisons, such as the following.
Scene model: the fire and smoke, heat flux or emitted thermal (Planck's radiation formula), the fire flickering, the reflectance, absorption emission lines, and analysis of the atoms (e.g., potassium) and the molecules (water and carbon dioxide) are characteristics to be investigated. The background emits the thermal heat, the reflectance of sunlight, the clouds (clouds shadow) the buildings and the sky polarisation. The atmosphere has a number of gases (N2, O2, CO, CO2, H2O, etc.); each one has its own absorption and reflection behaviour. Water vapour concentration could vary as a result. Carbon dioxide is more uniformly distributed but its value is larger over industrial cities and vegetation fields than over oceans and deserts.
Figure 10 describes the physical aspects related to forest fire detection.

How FiresSense Analyse Images [28].
The atmosphere strongly influences the radiation transfer of the forest fire by absorbing and scattering radiation. The simplest form of detection is to compare two subsequent images of the same scene using an image processing system. If a difference is found between two images above a certain threshold which is defined by the noise in the images, an alarm is generated.
After that, further processing is applied to the images by using Markov model. In this model Markov defines three states for each flame and nonflame moving pixel. See Figure 11.

Three-state Markov models for flame and nonflame moving pixels, respectively [28].
Yu et al. [29] present a real-time forest fire detection system by using neural wireless sensor networks. They relied on the clustering algorithm as routing techniques to collect the measurement from the scattered sensors such as humidity, temperature, smoke, and wind speed where this data was used as input for The United States National Fire Danger Rating System.
Wang and Meng network required a very high density of deployed nodes and a very complicated routing and processing procedure to send the required data for the central unit. The main focus of this study is data aggregation methods; hence energy consumption issues are not discussed.
Zhu et al. [31] created a monitoring system for forest fires based on wireless sensor networks and GPRS network. They relied on clustering systems to provide real-time monitoring for smoke, temperature, humidity, and some other environmental parameters. The collected data from the nodes will be transmitted in multihop fashion to the central nodec and then to the monitoring center to produce reports, graphs, and curves to help the fire fighters make an appropriate decision.
Libelium [30] is one of the wireless sensor network companies based in spain. They call their nodes Waspmote and they introduce many applications for their products such as smart cities, forest fire detection, and many other applications. In forest fire application, they used their Waspmote nodes and a GPS device to localise those nodes. They provided the nodes with gas boards to measure temperature, humidity, carbon monoxide (CO), and carbon dioxide (CO2) to detect the fire.
Libelium created a very good system; as their experiment shows, they deployed 90 sensors to measure the four parameters every five minutes, and they attached solar panels for power scavenging. Waspmote nodes and the gas board made the device in bulky size, which was required to be installed manually one by one in appropriate positions; this is not efficient in large areas. The gas board will lead to more power consumption, thus reflecting on the network life span. See Figure 12.

Waspmote and Gas Board [30].
5.1. Discussion
The previous part details several of the principal study sources that have inspired the development of the research work in this thesis. It proves that the best available solution for forest fire detection is using sensor networks, because it can provide all required information that influences the environment at any moment accurately.
Wireless sensor network technology normally deploys large number of small, low cost sensors fairly densely that can observe and influence the physical world around them by gathering physical information, transforming it into electrical signals, sending it to a remote location to do some analysis, and deploying the results in different applications. By this way there is no need to build towers or set up complicated communication links such as microwave and satellite. It can be deployed anywhere even in inaccessible places.
This technology can provide real-time monitoring, where it can provide information at the ignition instance or at very small delays, depending on the node used in wake-up/sleep schedule.
This technology works on short communication links fashion. As a result, more accurate information with less delay can be provided for the fire fighters.
Using this technology for forest fire application requires a large number of randomly deployed nodes to provide a reliable network. Based on what has been discussed above, it can define the key issues of this network for this application in the following points.
Localisation: all the previous work used a GPS or fixed the nodes in a known place. Coverage: the nodes deployed randomly a full coverage almost impossible. Network life span: For sensor nodes working on batteries, it is impossible to go back to each node in the forest and recharge it again. Fire detection method: this is the heart of the application; it should be precise and reliable.
In the previous work they used other kinds of sensors like IP cameras or other technologies like satellite images or superoptical tower cameras. They integrated the sensor nodes information with data bases, weather stations, fuel and weather indexing models, and many other models and processing techniques to reduce the number of false alarms. In order to detect the fire, each node was provided with many sensors to get the environment parameters such as temperature, wind speed, relative humidity, and fire flickering to define a fire incident in the first place.
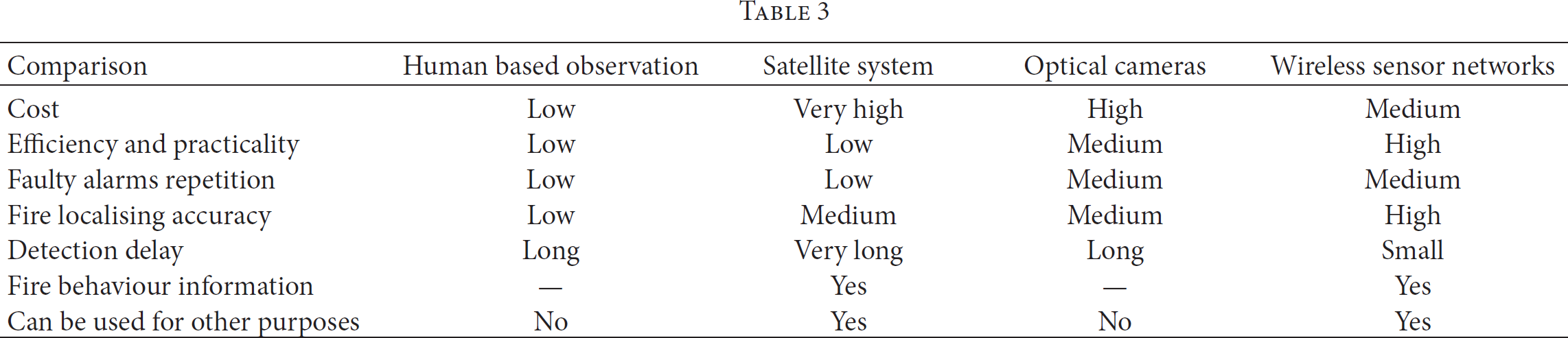
6. Summary of the Systems
Comparison between forest fire detection systems.

Footnotes
Conflict of Interests
Ahmad A. A. Alkhatib has no conflict of interests to disclose.
Acknowledgment
The author would like to thank the reviewers for their helpful comments on this paper.