
Abstract
In the study of three-dimensional underwater sensor networks, the nodes would produce changes in perception range under the influence of environmental factors and their own hardware. Requesting all nodes completely isomorphic is unrealistic. Ignoring boundary effects usually causes the coverage effect of the actual deployment of networks to not reach the anticipated result. This paper firstly presents an underwater sensing model with normal distributed node sensing radius. Secondly, it gives the relationship between expected deployment quality and the number of nodes in the premise of considering boundary effects. Then, it deduces nodes’ redundancy formula based on the sensing model with normal distributed node sensing radius, making node could determine whether itself is a redundant node only based on the number of its neighbour nodes. Furthermore, this paper proposes a redundancy model and boundary effects based coverage-enhancing algorithm for three-dimensional underwater sensor networks (RBCT). Simulation results show that RBCT, compared to similar algorithms, has certain advantages in saving energy and enhancing coverage rate.
1. Introduction
Underwater wireless sensor network (UWSN) has drawn great attention over the recent years for its extensive application prospect in oceanographic hydrological data collection, marine pollution monitoring, marine disaster early-warning, and underwater military reconnaissance [1–8]. Before the emergence of wireless sensor networks (WSNs), underwater data perception and collection depend on costly wired network, while UWSN highly reduces the cost of these underwater applications. UWSN consists of nodes that are cooperatively monitoring in three-dimensional space. According to the three-dimensional UWSN model in [9] proposed by Tezcan et al., the architecture of UWSN consists of anchor, underwater sensor node, and buoy node. Figure 1 depicts the architecture of UWSN. Sensor devices are broadcasted to target area from aircraft or boat. As soon as it comes into contact with water, devices anchor is fixed on the location to avoid floating away with ocean current and deviating from monitoring area which occurred in the model proposed by Tezcan et al. At initial phase, sensor node and the buoy node float on the sea surface. In working phase, according to control algorithm, devices can adjust the length of cable between buoy node and underwater sensor node to deploy the underwater sensor to appointed depth. In the model proposed by Akyildiz et al. [10] and Heidemann et al. [11], underwater sensors anchor in the bottom of sea and communicate via acoustic link. However, in current technical conditions, un derwater acoustic link with narrow band width and high latency can easily be interfered by path loss, noise, multipath effect, and so forth [12, 13]. Therefore, we choose cable as communication medium between underwater sensor nodes and buoy nodes while nodes communicate with each other via wireless communication between buoy nodes. The wireless communication module of buoy nodes has multiple power levels to maintain different communication radius. Buoy can also equip locating device like GPS receiver and energy supply device like solar panel. When buoy receives data from underwater sensor node, it transmits them to base station on the sea or shore and then the data is forwarded to communication satellite, ground network, and terminal user.

Architecture of UWSN.
In WSN, coverage rate is an important indicator to network service quality which is the same in UWSN. Optimizing underwater sensor network coverage has important significance for rationally allocating network space resources, better achieving environmental perception and information acquisition task, and improving the network viability. Terrestrial wireless sensor networks have been studied extensively. In [14], Bai et al. propose and design a series of connected coverage models in three-dimensional wireless sensor networks with low connectivity and full coverage. In [15], Alam and Haas study truncated octahedron deployment strategy to monitor network coverage situation. However, there are little researches on three-dimensional underwater sensor networks. In [16], Alam and Haas point that an underwater sensor network can have significant height which makes it a three-dimensional network unlike a terrestrial network. There are many important sensor network design problems where the physical dimensionality of the network plays a significant role. One such problem is determining how to deploy minimum number of sensor nodes so that all points inside the network are within the sensing range of at least one sensor and all sensor nodes can communicate with each other, possibly over a multihop path. The solution to this problem depends on the ratio of the communication range and the sensing range of each sensor. Under sphere-based communication and sensing model, placing a node at the centre of each virtual cell created by truncated octahedron-based tessellation solves this problem when this ratio is greater than 1.7889. However, for smaller values of this ratio, the solution depends on how much communication redundancy the network needs. Alam and Haas provide solutions for both limited and full communication redundancy requirements. In [17], Akkaya and Newell propose a distributed node deployment scheme which can increase the initial network coverage in an iterative basis. Assuming that the nodes are initially deployed at the bottom of the water and can only move in vertical direction in 3D space, the idea is to relocate the nodes at different depths in order to reduce the sensing overlaps among the neighbouring nodes. The nodes continue to adjust their depths until there is no room for improving their coverage.
In consideration of energy limitation of nodes and the requirement of durability without energy supply, we make use of the redundancy of nodes and heuristic algorithm to make nodes switch to certain state in order to shut down nodes in turn with guaranteed service quality. As a result, node energy is conserved and network lifetime is prolonged. Most of the existing researches are based on the assumption that sensing radius of all nodes is the same while in practice radius varies due to nodes’ characteristics and environmental influence. This paper presents an underwater sensing model with normal distributed node sensing radius and analyzes the redundancy model of these nodes. Furthermore, this paper proposes RBCT algorithm combined with the virtual potential field algorithm to optimize the coverage of networks.
2. Network Model and Problem Description
2.1. Problem Formulation
The coverage enhancement problem of three-dimensional sensor networks can be described as follows. Given a three-dimensional target area, we should create a reasonable mathematical model to find out the relationship between expected deployment quality and the number of nodes in the premise of considering boundary effects. This mathematical model can be used to guide the deployment of nodes. After deployment of certain scale sensor nodes, the problem is how to adjust the nodes’ working conditions to maximize network survival time. When a certain number of nodes are working, the problem is how to adjust the depth of underwater sensor nodes by using coverage optimization algorithms to maximize coverage rate.
We assume that the underwater sensor network has the following properties.
The distribution of underwater sensor nodes obeys Boolean sensing model. Underwater sensor node Sensing radius of underwater sensor nodes is normally distributed as Length of the cable between underwater sensor node and buoy node is adjustable; namely, underwater sensor nodes can accurately move to appointed target location in vertical coordinate axis. Each underwater sensor node only needs to know the relative position between itself and its neighbouring nodes, without the need to know the precise location by positioning devices.

In the ideal network model, all the underwater sensor nodes have the same rated sensing radius
2.2. Related Definition
Definition 1.
Neighbor nodes set

Definition 2.
Coverage degree Cd(x): the number of nodes that covered point x is called the coverage degree of point x, denoted as Cd(x):
Definition 3.
Coverage rate
3. Analysis on Coverage Quality and Nodes Deployment Density
Since the boundary effects will have a greater impact on nodes deployment, in this section, we will analyze the relationship between the number of nodes deployed randomly and the initial network coverage expectations under the premise of considering boundary effects.
To a random given node

Monitored region and related subregion.
Variable M represents the volume that is not covered by nodes in monitored region Ω:
Using Fubini's theorem we obtain that

To a given random point

To a given random point

When

When

Two situations of
Situation 1. The distance between node and the corner of Ω(1) is shorter than
Situation 2. The distance between node and the corner of Ω(1) is longer than

We denote


Since Ω(2) is only a small part of Ω, the probability that a node is located in Ω(2) is very small. Even if a node is located in Ω(2), the volume of Ω(2) which is not covered by node is very small compared to Ω. So its impact on the calculation results can be ignored. To simplify the calculations, we set
Parameter a represents the distance between node


Node
With

When the number of nodes deployed in Ω is N, we obtain

When N nodes are deployed in Ω, we use EDQ (expected deployment quality) to represent the expected deployment quality of the three-dimensional underwater sensor networks. Therefore, if EDQ is required to achieve a certain value in considering boundary effect, the number of nodes deployed in Ω should satisfy (20):

4. Redundancy Model Based Coverage-Enhancing Algorithm for 3D Underwater Sensor Networks
With the relationship of the number of underwater sensor nodes N and EDQ, we can deploy randomly a number of nodes more than the required number according to (19) and (20). The certain strategy can be used to adjust the working states and positions of some nodes in order to increase the lifetime and coverage rate of network. In this section, we propose a strategy based on redundancy of node. Each node firstly decides their working states according to redundancy. Then the working nodes use the virtual force algorithm to adjust their positions in the vertical direction.
4.1. Analysis on Node Redundancy
Definition 4.
Node redundancy
ξ
(i): to a random underwater sensor node
To adjust the working states of nodes based on its redundancy, two problems should be solved. One is the criterion for determining whether a node is redundant, the other is how to schedule redundant node. This section is focused on the first problem and the other one will be discussed in the next section. One way to calculate the redundancy of node is using positioning devices to obtain location information. However, this approach is a huge burden for cost and energy consumption of networks. We build a probabilistic model. Node can calculate its redundancy based on the number of its neighbouring nodes using this probabilistic model. Then each node can determine whether it is a redundant node.
All nodes are randomly and uniformly deployed in monitored region Ω, so each node locates in a random point in Ω with probability

Sensing radii of

The probability of event that there is overlap region in sensing area of


Definition 5.
Redundant node: node

Based on the above analysis, we can know that node

4.2. Node Scheduling Algorithm Based on Virtual Force
We have made a detailed analysis on virtual force of three-dimensional sensor networks in [18]. We will only illustrate some necessary concepts in this section. We point out in [18] that the coverage rate fluctuates significantly and nodes adjust location frequently in late stage of traditional coverage optimization algorithms. For these shortcomings, we improve the algorithm by using coverage impact factor and central computing nodes.
Definition 6.
Coverage impact factor: coverage impact factor
We add some central computing nodes into the monitored region. All underwater sensor nodes should be within the communication ranges of central computing nodes. Underwater sensor nodes send their target location information to the nearest central computing node. The central computing nodes calculate the coverage impact factors of the nodes within their communication ranges once every slot time and send them to each underwater sensor node. Then each node decides whether to adjust its location based on the coverage impact factor. The number and positions of central computing nodes are determined according to the actual condition of application.
Node


In UWSN, we can only adjust the length of cable between buoy node and underwater sensor node to change the location of underwater sensor nodes. The underwater sensor nodes can achieve coverage enhancement only by adjusting their location in the vertical direction.

4.3. Algorithm Description
Based on the above analysis, to a given EDQ of 3D underwater sensor networks, we firstly calculate the minimum number of nodes N that need to be deployed according to (20). Then we randomly deploy more than N underwater sensor nodes in monitored region Ω. At this time, buoy nodes are randomly distributed on the surface area, and the length of cable between buoy nodes and underwater sensor nodes is random. After completion of the initial deployment, each node firstly collects the information of its neighbour nodes and determines whether it is a redundant node itself. If it is a redundant node, then the node will be set to sleep mode or does not change its working state. Then we use the virtual force algorithm to adjust the position of working nodes. After a round of adjustment, nodes (including those sleeping nodes) change their working states again according to the number of their neighbour nodes. Particularly, at this time we no longer use original EDQ as a factor to determine whether a node is redundant node in order to rapidly enhance the coverage rate of monitored area. We replace EDQ with coverage rate of monitored area as the judgment criteria. The nodes constantly circulate the above processes. Take node
Input: information of Output: working state and final location information of (1) (2) Set loop maximum (3) while ( (4) Update current location information of (5) Update the neighbour nodes set (6) Replay EDQ with current coverage rate of monitored area, and determine whether (7) if ( (8) Set (9) else (10) if ( (11) Wake up (12) (13) for ( (14) Calculate the virtual repulsive force (15) (16) Calculate the moving distance (17) if (18) Send the target position (19) Wait to receive the coverage impact factor (20) if ( (21) Move (22) else (23) sleep( (24) (25) end;
Algorithm 1
RBCT algorithm is running on
Input: current location and target location information of all nodes within the communication range of Output: coverage impact factor (1) Get the initial location information of all nodes within communication range; (2) Calculate the initial coverage rate (3) while (1) (4) Update (5) Receive target location information of all nodes within the communication range. We use node (6) Calculate the coverage rate (7) Calculate the coverage impact factor of (8) Send the coverage impact factor (9) sleep( (10) end;
Algorithm 2
5. Algorithm Simulations and Performance Analysis
In this section, we firstly analyze the convergence of RBCT algorithm. Secondly, we use a specific case to illustrate the coverage enhancement effect to a three-dimensional sensor network. Finally, we compare RBCT algorithm with other similar algorithms by different values of key parameters. Specific values of parameters are shown in Table 1.
Experiment parameters.

5.1. Algorithm Convergence Analysis
We carry out a group of experiments with five kinds of EDQ so as to analyze RBCT algorithm convergence. To a given EDQ, we can calculate the number of nodes that need to be deployed through (20). According to every EDQ, we randomly produce 20 topological structures, respectively, and calculate the algorithm convergence times and average. Experimental data is shown in Table 2 with parameters
Convergence analysis on experimental data.

Based on the above analysis we can reach a conclusion that the convergence of RBCT algorithm, that is, the adjustment number of times, does not change conspicuously along with EDQ or N. The value ranges from 22 to 27; thus, RBCT algorithm can improve the coverage of monitored region in a short time and has a nice convergence.
5.2. Case Study
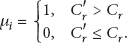
Figure 5 records the coverage curves of monitored region in experiments of algorithm convergence analysis. Figure 5 shows that due to the influence of RBCT algorithm, coverage rate is constantly improving. When the network reaches a steady state, coverage rates remain unchanged and RBCT algorithm ends. The coverage rates do not present a fluctuating state during the execution of RBCT algorithm since the introduction of coverage impact factor. By RBCT algorithm, the coverage rates are raised to 50.3%, 65.2%, 76.3%, 86.1%, and 92.8% without changing the number of initial nodes. We can know through (20) that at least 185, 272, 367, 498, and 661 nodes are separately needed to achieve thus coverage rate by the way of random deployment. It means that we have saved 54, 90, 130, 189, and 254 nodes, respectively. From this set of data we can see that the higher the EDQ, the larger the number of nodes that can be saved by RBCT algorithm. RBCT algorithm greatly reduces the cost and complexity of network.
Coverage curves in different scale of nodes.
In order to intuitively view the coverage condition of monitored region, we draw it graphically as shown in Figure 6. We take one random topology as study case when the number of nodes is 407. Figure 6 shows the projection of monitored region in the vertical direction. The initial coverage rate is basically consistent with EDQ and from Figure 6(a) we can see that overlap region and fade zone are significant in network for the randomness of deployment. By means of RBCT algorithm, redundant nodes change into sleeping mode, and then working nodes adjust their locations in the vertical direction. Proportion of fade zone is constantly reducing when RBCT algorithm is running. Finally, we reach the purpose of covering the maximum monitored region with minimal number of nodes, which is shown in Figure 6(c).

Coverage optimization under RBCT algorithm when
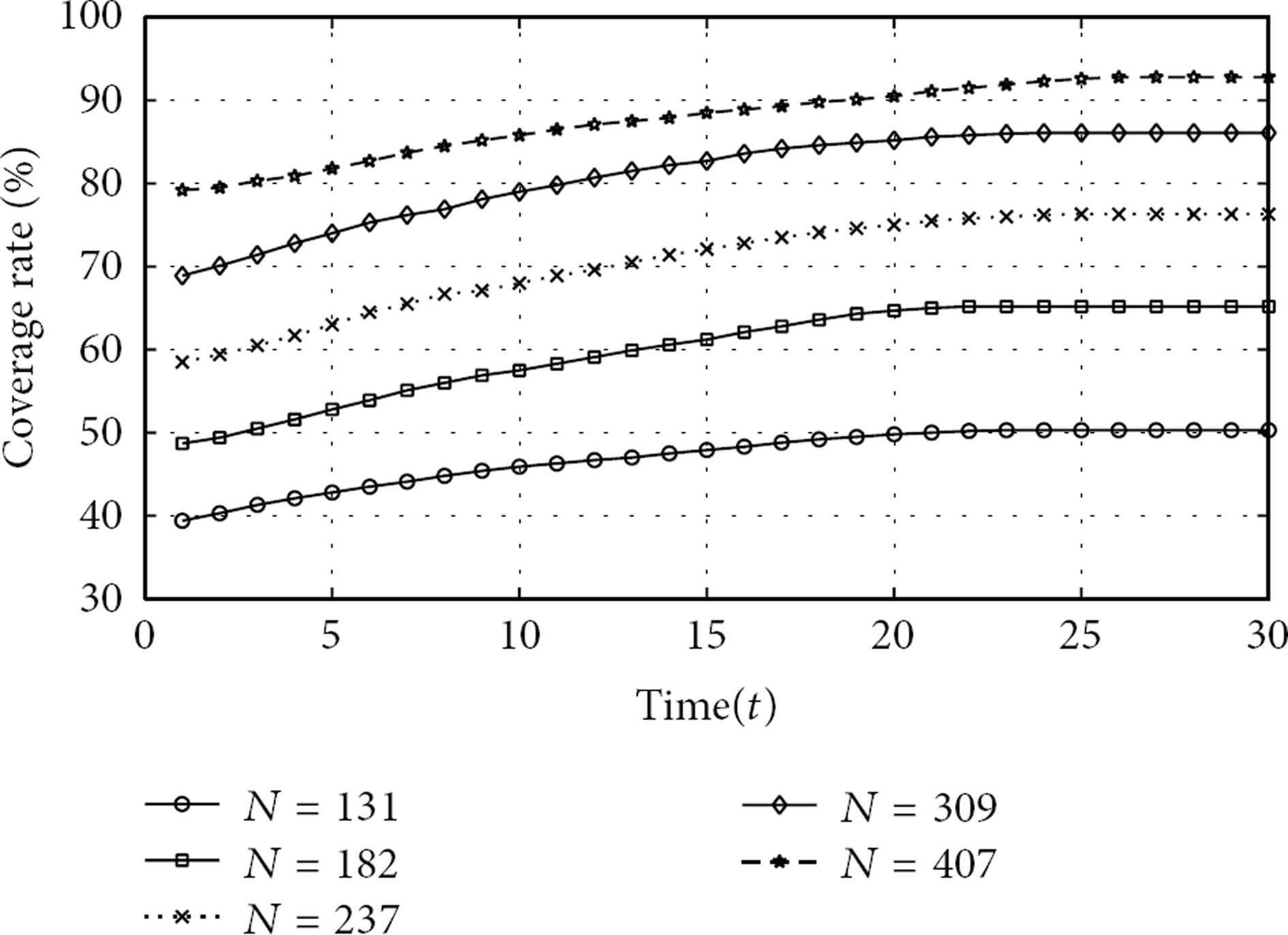
We carry out a group of experiments as the following to prove that RBCT algorithm can reduce the energy consumption of networks. We assume that the initial energy of each underwater sensor node is 100. If one node is in working state and does not need to adjust the position, then the energy consumption of this node is 1 within one time step. If one node is in sleeping state, then the energy consumption of this node is 0. The energy consumption of every position adjustment is 1. When the energy of a node is reduced to 0, the status of this node is marked as dead. If more than 10% of all nodes are marked as dead, we identify the network is paralyzed. We record the time from initial deployment of the nodes to the paralysis of network as the lifetime of network. We randomly produce 30 topological structures with
Effect on lifetime with different optimizations.

Effect on coverage rate with different optimizations.
5.3. Comparative Analysis of Algorithms
In this section, a series of simulation experiments are conducted to illustrate the effect on the performance of RBCT algorithm from the three key parameters. They are expected deployment quality of monitored region EDQ, average maximum sensory radius
As shown in Figure 9, we conduct the simulation experiments with different EDQ. Other experimental parameters satisfy that

Convergent curves with different EDQ.

Convergent curves with different
As shown in Figures 11 and 12, we conduct the simulation experiments with different

Convergent curves with different

Relationship between the number of loops and
As can be seen from Figures 9 to 12 compared to PCPE algorithm and PFCEA algorithm, with the same parameter value, the proposed RBCT algorithm increases the coverage quality the most significant after the optimization of the initial deployment, which illustrates the superiority of this algorithm.
6. Conclusion
This paper derives the relationship between the number of nodes and the coverage quality of 3D underwater sensor network using mathematical analysis and proposes RBCT algorithm based on the redundancy model of nodes to improve the coverage of monitored region and prolong the lifetime of network. The coverage impact factor is introduced to reduce profitless movement and further improve coverage optimization. In simulation experiments, we firstly verify the convergence of the algorithm and then the effect on the algorithm from the key parameters and validity of RBCT are demonstrated by the comparisons among RBCT, PCPE, and PFCEA. The proposed algorithm effectively improves the coverage performance of network but many issues in this paper could be improved. We can see from the simulation experiments that the actual initial coverage rate of monitored region is still slightly lower than EDQ. It shows that the theoretical analysis of this paper could be improved which is for further study.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
The subject is sponsored by the National Natural Science Foundation of China (no. 61171053), Scientific & Technological Support Project (Industry) of Jiangsu Province (no. BE2012183), Natural Science Key Fund for Colleges and Universities in Jiangsu Province (11KJA520001, 12KJA520002), Science & Technology Innovation Fund for Higher Education Institutions of Jiangsu Province (CXZZ11-0409), Doctoral Fund of Ministry of Education of China (20113223110002), and the Project Funded by the Priority Academic Program Development of Jiangsu Higher Education Institutions (no. yx002001).