
Abstract
We discuss the delay-constrained energy efficient multicast routing problem in cognitive radio ad hoc networks. A cognitive radio ad hoc network is a wireless multihop network established by secondary users on varying available spectrum bands. The research on routing is a hot topic in the field of cognitive radio ad hoc networks. However, multicast routing algorithm study of cognitive radio ad hoc networks is still at its start stage. In this paper, we proposed a novel delay-constrained energy efficient multicast routing algorithm (DCEEMR) in cognitive radio ad hoc networks. The DCEEMR guarantees that the multicast tree can be found if it exists, and the multicast tree satisfies the delay bound and has low energy consumption. The algorithm uses delay-energy function to construct the multicast tree based on the spectrum selection. Through an example with random network topology, we demonstrate that our algorithm is better in terms of energy cost of multicast tree as compared to the existing algorithm QoS dependent multicast routing (QDMR). Moreover, the algorithm does not suffer from high complexity common to the algorithm QDMR. Experiment results by NS-2 show that the delay and cost of tree are lower than well-known multicast ad hoc on-demand distance vector (MAODV) protocol.
1. Introduction
Recent technological advances have resulted in the development of wireless ad hoc networks composed of devices that are self-organizing and can be deployed without infrastructure support. These devices generally have small form factors and have embedded storage, processing, and communication ability [1]. With the growing proliferation of wireless devices, spectra are increasingly becoming congested.
The license of the wireless spectrum is currently undertaken on a long-term basis over vast geographical regions. In order to address the critical problem of spectrum scarcity, the Federal Communications Commission (FCC) has recently approved the use of unlicensed devices in licensed bands. Consequently, dynamic spectrum access techniques are proposed to solve these current spectrum inefficiency problems. This new area of research foresees the development of cognitive radio networks to further improve spectrum efficiency. The basic idea of cognitive radio networks is that the unlicensed devices (also called cognitive radio users or secondary users) need to vacate the band once the licensed device (also known as a primary user) is detected. The emerging field of cognitive radio networks is geared to address the increasing congestion in the unlicensed band by opportunistically using vacant spectrum, such as frequencies licensed for television broadcast and public service, among others [2]. Cognitive radios are highly agile wireless platforms capable of autonomously choosing device parameters based on prevailing operating conditions [3]. Cognitive radio networks, however, impose unique challenges due to the high fluctuation in the available spectrum as well as diverse quality of service (QoS) requirements [4].
Cognitive radio ad hoc networks can be defined as follows [5]: cognitive radio ad hoc network is considered for realizing the cognitive radio by using multihop communication networks without giving the large interference toward the primary system. In [1], the authors give the differences between cognitive radio ad hoc networks and classical ad hoc networks.
(i) Choice of transmission spectrum: in cognitive radio ad hoc networks, the available spectrum bands are distributed over a wide frequency range, which vary over time and space. Thus, each user shows different spectrum availability according to the primary user activity. As opposed to this, classical ad hoc networks generally operate on a predecided channel that remains unchanged with time. For the ad hoc networks with multichannel support, all channels are continuously available for transmission, though nodes may select few of the latter from this set based on self-interference constraints. A key distinguishing factor is the primary consideration of protecting the primary user transmission, which is entirely missing in classical ad hoc networks.
(ii) Topology control: in classical ad hoc networks, this is easily accomplished by periodic beacon messages on the channel. However, in cognitive radio ad hoc networks, as the licensed spectrum opportunity exists over large range of frequencies, sending beacons over all the possible channels is not feasible. Thus, cognitive radio ad hoc networks are highly probable to have incomplete topology information, which leads in an increase in collisions among cognitive radio users as well as interference to the primary users.
(iii) Multihop/multispectrum transmission: the end-to-end route in the cognitive radio ad hoc networks consists of multiple hops having different channels according to the spectrum availability. Thus, cognitive radio ad hoc networks require collaboration between routing and spectrum allocation in establishing these routes. Moreover, the spectrum switches on the links are frequent based on primary user arrivals. As opposed to classical ad hoc networks, maintaining end-to-end QoS is involved.
(iv) Distinguishing mobility from primary user activity: in classical ad hoc networks, routes formed over multiple hops may periodically experience disconnections caused by node mobility. These cases may be detected when the next hop node in the path does not reply to messages and the retry limit is exceeded at the link layer. However, in cognitive radio ad hoc networks, a node may not be able to transmit immediately if it detects the presence of a primary user on the spectrum, even in the absence of mobility. Thus, correctly inferring mobility condition and initiating the appropriate recovery mechanism in cognitive radio ad hoc networks necessitate a different approach from the classical ad hoc networks.
(v) Spectrum sensing for cognitive radio: spectrum sensing is the very task upon which the entire operation of cognitive radio rests. For cognitive radio to fulfill the potential it offers to solve the spectrum underutilization problem and do so in a reliable and computationally feasible manner, we require a spectrum sensor that detects spectrum holes (i.e., underutilized subbands of the radio spectrum), provides high spectral-resolution capability, estimates the average power in each subband of the spectrum, and identifies the unknown directions of interfering signals [6–8].
Based on the above, the existing routing algorithms and routing protocols in classical ad hoc networks are not suitable for cognitive radio ad hoc networks and are unaware of the changing spectrum opportunity. In cognitive radio ad hoc networks, routes must be constructed to avoid the regions affected by active primary users and must also adapt themselves to subsequent changes induced by new primary user's arrival. We discuss the delay-constrained energy efficient multicast routing algorithm based on this principle.
The most significant challenges of routing in cognitive radio ad hoc networks are to maximize secondary users' throughput and minimize their consumed energy, while not interfering with the primary users. Energy efficiency is a critical issue in cognitive radio ad hoc network routing algorithms due to lack of infrastructure supporting. Furthermore increasing real-time applications require satisfying QoS constraints, such as delay, jitter, and data packets loss. For the sake of guaranteeing the behalf of primary user, such application requires consideration of spectrum selection and spectrum switching.
In the paper, we address the problem of multicast routing in cognitive radio ad hoc networks and first propose the delay-bounded energy efficient multicast routing algorithm in cognitive radio ad hoc networks. Multicast is communication from a single source node to a group of multicasts. A fundamental issue in multicast communication is route selection, usually based on trees. So our multicast routing algorithm makes great efforts to find a multicast tree, which is rooted from the source, spans all multicast nodes, and has lowest energy cost of the tree. In cognitive radio ad hoc networks, nodes communicate with each other by radio signals, which are broadcast in nature. The algorithm uses the local cost information, which it makes easily actualized in a distributed manner.
2. Related Works
Routing algorithm is a hotspot issue in the field of cognitive networks. In cognitive radio ad hoc networks, its routing research requires consideration of selection spectrum and routing path [9, 10]. However, numerous works focused multicast routing on classical wireless ad hoc networks [11]. Though there are some routing protocols on supporting spectrum decision in cognitive radio networks [12, 13], most of the existing works focus on unicast routing. As far as multicast routing algorithm is in cognitive radio ad hoc networks, the research is still in beginning stage.
In a classical ad hoc network, each node has a limited energy resource (battery) and operates in an unattended manner. Consequently, energy efficiency is an important design consideration for these networks. Most recent work [14–18] has been proposed for the problems of minimizing the energy consumption for multicasting in classical wireless ad hoc networks, addressed as minimum-energy multicast (MEM) [9, 14], respectively. Since the MEM problem has recently been shown to be NP-hard [19, 20], they proved the energy efficient multicast routing problem unlikely has an approximation algorithm with a constant performance ratio of the number of nodes in the networks. Efficient heuristic algorithm design has received much more attention. Li et al. [9] proposed a Steiner tree based algorithm with a guaranteed approximation performance ratio and two efficient heuristic algorithms for the energy efficient multicast problem in ad hoc networks. And they first prove the problem is NP-hard.
For the MEM problem, a straight greedy approach is the use of multicast trees that consist of the best unicast paths to each individual destination from the source node. In [14], multicast incremental power (MIP) method is based on a broadcast tree construction algorithm with pruning the redundant branches of the broadcast tree to obtain a multicast tree in wireless networks. For supporting real-time applications, there have been many delay-constrained multicast routing algorithms [15–17]. In [15], Kou et al. proposed a heuristic algorithm KMB named by the abbreviation of their names for the Steiner tree problem. In [16], Kompella et al. designed an algorithm named KPP (the abbreviation of the authors); the algorithm extends KMB algorithm to construct delay-constrained multicast tree. KPP algorithm assumes that the delay bound and link delays are all integers. Guo and Matta proposed QDMR algorithm in [17], which modified destination-driven multicast routing (DDMC) algorithm, where DDMC is an unconstrained Steiner tree heuristic algorithm [18]. QDMR dynamic adjusts its indicator function according to ratio between end-to-end delay (from source node to multicast node) and the delay bound. But the two algorithms are not designed for cognitive radio ad hoc network. Cheng et al. [12] proposed the method to evaluate cumulative delay in cognitive radio ad hoc network. In their protocol, the cumulative delay was regarded as routing metric, which was based on ad hoc on-demand distance vector (AODV) [21].
Our multicast routing algorithm arises from the observation that DDMC algorithm gives priority to multicast nodes and QDMR algorithm chooses the new adding node with lower end-to-end delay in constructing multicast tree as soon as possible. But it is quite different from these algorithms: at first, our multicast routing algorithm adapts to cognitive radio ad hoc network environment based on spectrum selection mechanism. The algorithm can construct an energy efficient multicast tree with satisfying the delay bound. Spectrum selection is based on our energy-delay function. Secondly, our algorithm considers the average cost consuming of candidate node covering multicast node in constructing multicast tree, so it is more efficient than existing algorithms. We detail our algorithm in Section 3. In the numerical results, we demonstrate that our algorithm is better in terms of energy cost as compared to the existing algorithm QDMP through an example. Experiment results by NS-2 show that the delay and energy cost are lower than well-known MAODV protocol [22].
In the remainder of this paper, in Section 2, the network model and the problem definition are given. We detail our algorithm DCEEMR in Section 3. In Section 4, we present the simulation results. Section 5 concludes this paper.
3. Network Model and Problem Specification
A cognitive radio ad hoc network can be modeled as a directed graph
In addition, based on spectrum availability and node mobility of cognitive radio ad hoc networks, end-to-end delay should be considered during the process of designing algorithm. We assume that there are K channels in link
Given a multicast request


When setting the delay bound to be infinity, the delay-constrained MEM problem simplifies to the unconstrained MEM problem in cognitive radio ad hoc network. Cognitive nodes in cognitive radio ad hoc network can be regarded as the nodes in classical ad hoc network without consideration of the interfering with primary users, and the problem can be seen as the special case of unconstrained MEM problem, which has been proved to be NP-hard. Our problem is how to, given a multicast request
4. DCEEMR Algorithm
In this section, we shall describe the algorithm in three parts: (i) the spectrum selection in multicast tree and (ii) the algorithm description and at last (iii) giving an example of DCEEMR algorithm. Through an example, we demonstrate that our algorithm is better in terms of energy cost of multicast tree as compared to the existing algorithm QDMR.
4.1. Spectrum Selection in Multicast Tree
In cognitive radio ad hoc networks, routing algorithm not only considers path selection but also faces spectrum decisions. Many routing protocols of cognitive radio ad hoc networks are based on basically routing protocols of classical ad hoc networks; for example, the routing selecting in [12, 23] is based on unicast routing protocol AODV and in [2] is based on geographic routing protocol greedy perimeter stateless routing (GPSR) [24]. The best routing paths are fist identified and then the preferred spectrums among the path are chosen in [3]; here, the AODV routing protocol is modified to include the list of preferred spectrums by a given node as the route request (RREQ) is forwarded. Once the RREQ is received, the destination is aware of spectrums that may be used to transmit at each hop and finds the optimal combination such that channel switching is minimized. These routing protocols are not applicable in delay-constrained energy efficient multicast routing problem, because it cannot guarantee the delay from source node to multicast nodes all satisfies the delay bound. But our spectrum selection mechanism is similar to these spectrum opportunities (SOP) methods [12]. Intuitively, a channel can be considered as an opportunity if it is not currently used by primary users [25]. Consider a pair of secondary users (A and B) aiming to communicate in the presence of primary users. A channel is an opportunity to A and B if they can communicate successfully over this channel while limiting the interference to primary users below a prescribed level determined by the regulatory policy. A common control channel is then formed by those traditional interfaces such that all nodes' SOP can be shared among network. The key message is that SOP must be defined jointly at the transmitter and the receiver. It is a function of (i) the transmission powers of both primary and secondary nodes, (ii) the geographical locations of these nodes, and (iii) the interference constraint. From this definition, we arrive at the following properties of spectrum opportunity.
Spectrum opportunity depends on both transmitting and receiving activities of primary users. Spectrum opportunity is, in general, asymmetric: a channel that is an opportunity when A is the transmitter and B the receiver may not be an opportunity when B is the transmitter and A the receiver.
In [12, 24], end-to-end delay consists of channel switching time and path latency which is delay sum of all links from source node to multicast node
At first, a RREQ packet with piggyback (SOP s) information which is available spectrum band is transmitted by the source node s on each channel that is not affected by the primary user activity. For example, in Figure 1, the RREQ packet carries (SOP s) of node s transmit to node H, node I, and node J. If SOP information of receiving nodes shows intersection with sending node, this means that receiving node can use the same spectrum with sending node and does not interfere with nearby primary node; then the receiving node adds its own SOP information to the packet and then forwards the message.
Handling RREQ packet: after receiving RREQ packet, as forwarding nodes, node H and node I add their own SOP information to the packet and then forward the different RREQ packet (bring their (SOP s, H) and (SOP s, I) information, resp.) to their next hop nodes if their SOP information shows intersection with (SOP s) and otherwise drops RREQ. But as destination nodes, nodes J, K, F, and G choose available spectrum band from intersection of (SOP s) and then encapsulate spectrum choice into route reply (RREP) and send it back to predecessor node or source node. Handling RREP packet: after receiving RREP packet, as forwarding nodes, nodes H and I assign an appropriate spectrum band to the next hop or source node, respectively, based on our delay-energy function in DCEEMR algorithm, which will be described concretely in the next subsection. But as source node, it starts data packet transfer.

Spectrum selection in multicast tree.
4.2. Formulas in DCEEMR Algorithm
Given a multicast request
This heuristic grows the multicast tree from s. At the beginning,


If the candidate node
Now, we discuss our energy-delay function. In KPP algorithm, the choice function only adds the cost link which ensures the ratio of the cost between two multicast nodes and residual delay in completed graph to be lowest. But it does not fit for cognitive radio ad hoc network. Instead, we first calculate the average cost of the candidate node covering multicast nodes and then use the sum of the average cost and the communication cost between the candidate node and its father node as numerator. This sum value is more fair and proper to the delay-constrained energy efficient multicast routing problem in cognitive network. While the value of
In DDMC algorithm, the algorithm gives priority to multicast nodes. The cost of a new node v via a node u to add to the multicast tree is

In our algorithm, formula (4) is based on the indicator function of QDMR algorithm. But our
When selecting the next hop node, if
4.3. Algorithm Implements
Input. Network graph G, a source node s, and the set of multicast nodes M.
Output. A delay-bounded energy efficient multicast tree T.
Step 1.
Initialization: let
Step 2.
Based on the spectrum section mechanism in Section 4.1, source node s and candidate nodes select available spectrums to neighbor nodes of
Step 3.
If
When choose the node to add to the tree, let
Step 4.
If
Theorem 1.
Given a request
Proof.
To prove correctness, we need show the algorithm satisfies following conditions:
feasibility, that is, output of the algorithm is a multicast tree; the multicast tree is delay-constraint energy efficiency.
In the above-mentioned two conditions, (a) can be satisfied because the algorithm is greedy algorithm based on the idea of SPT (shortest path tree algorithm) [26]; it is easy to know that the greedy algorithm can output a multicast tree. For condition (b), the energy efficiency and delay-constraint can be guaranteed by Step 3 based on delay-energy function. If there have not been any multicast nodes in the set of neighbor nodes of candidate nodes (
The running time is obvious: searching for the node with lowest
4.4. An Example of DCEEMR
As the above, we know that the algorithm QDMR [17] is close to our algorithm. Though the algorithm QDMR is adapted to classical ad hoc networks, it does not conflict with our comparison if we do not consider spectrum selection. We will compare these algorithms through an example. In this example, we assume that a network scenario is random as in Figure 2. Given a multicast requirement as Figure 2, s is a source node and

Network scenario.
Figures 3 and 4 show that the multicast tree constructed by QDMR and our algorithm DCEEMR. From the figures, we can see that the cost of multicast tree by QDMR is 20 and the cost of multicast tree by our algorithm is 17. It means that the performance of DCEEMR about tree cost is better than QDMR, and it is important on delay-bounded minimum-cost multicast routing problem.

The multicast tree obtained by QDMR.

The multicast tree obtained by DCEEMR.
5. Numerical Results
In this section, we use numerical results from NS-2 to evaluate the performance of DCEEMR under different network conditions. The simulation model is built in the NS-2 simulator with multiradio multichannel extensions. We model the primary users' activities by using the exponential ON-OFF process as in [2]. Simulations are performed in random multihop network topologies of 50 nodes in an area of 1000 m × 1000 m. The coverage range of the primary user on its occupied channel is 300 m and the transmission range of the secondary user is set at 120 m. The node and primary user locations are randomly chosen in each trial run and an average of 30 trial runs is used for a data point. In this simulation, the initial energy of all nodes is set to be 10 J, and the transmission power of sending node is 0.66 W. We assumed that the receiving messages do not consume any energy that means only transmitting message could incur energy cost. We set channel switching time as 5 ms and the delay bound
We demonstrate the performance improvement attained by DCEEMR, by (i) direct comparison with classical multicast routing protocol MAODV, suitably extended for a multichannel environment, and (ii) by selectively enabling the joint path and channel optimization modules present in it. We perform four different tests in our study by measuring the impact of (a) number of channels, (b) number of primary users, (c) network size, and (d) multicast group size.
At first, we study the impact of number of channels and number of primary users. We consider two separate cases of 5 and 10 channels, in which a randomly chosen number of primary users is considered from the range [1, 9]. We first consider the end-to-end delay for 5 and 10 channels, as shown in Figures 5(a) and 5(b), respectively. The difference in end-to-end delay between DCEEMR and MAODV is significant. It is counterintuitive as the path to the destination for MAODV is the least in terms of hops, as it is not sensitive to the presence of the primary users. Further investigation revealed that the end-to-end delay is larger when 5 channels are present as compared to 10 channels. This is because when more channels are present, the cognitive users can use more channels and can select the link or routing with shorter delay. But the end-to-end delay is increasing with the increasing number of primary users. This is because the channel switch time is increasing due to the fact that the more primary users render large regions ineffective for transmission.
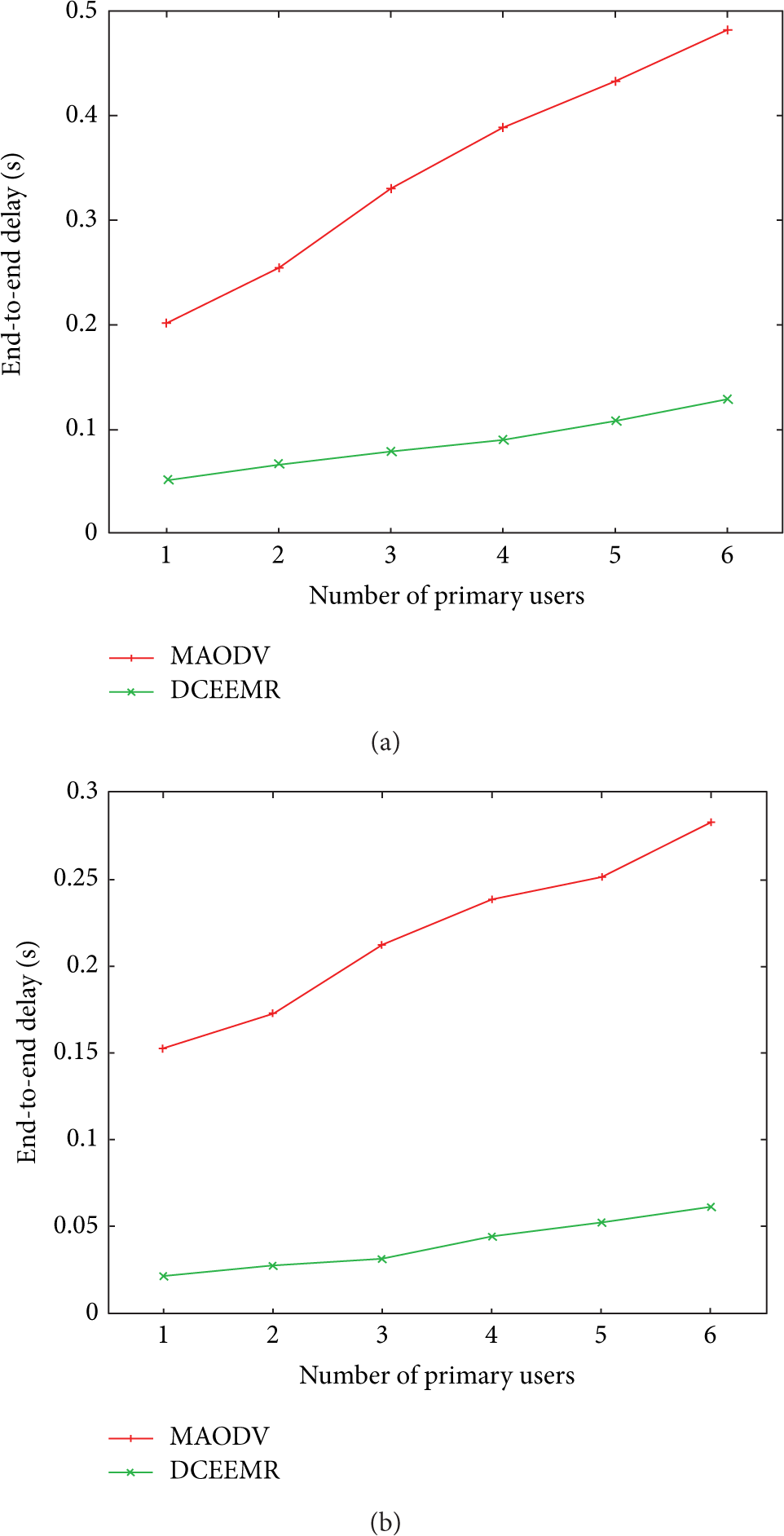
(a) The end-to-end delay for the case of 5 channels. (b) The end-to-end delay for the case of 10 channels.
Figures 6(a) and 6(b) show that energy consumption of constructing multicast tree with using DCEEMR and MAODV, respectively. We observe that the DCEEMR gives a good performance because the algorithm considers the energy efficiency based on delay-energy function. We can see that the energy consumption is increasing with the increasing number of primary users for both protocols. This is the key reason for higher retransmission radio and more forwarding nodes. In comparison, the DCEEMR uses delay-energy function to select next hop; this alleviates the energy consumption in the network thus giving better energy efficiency.
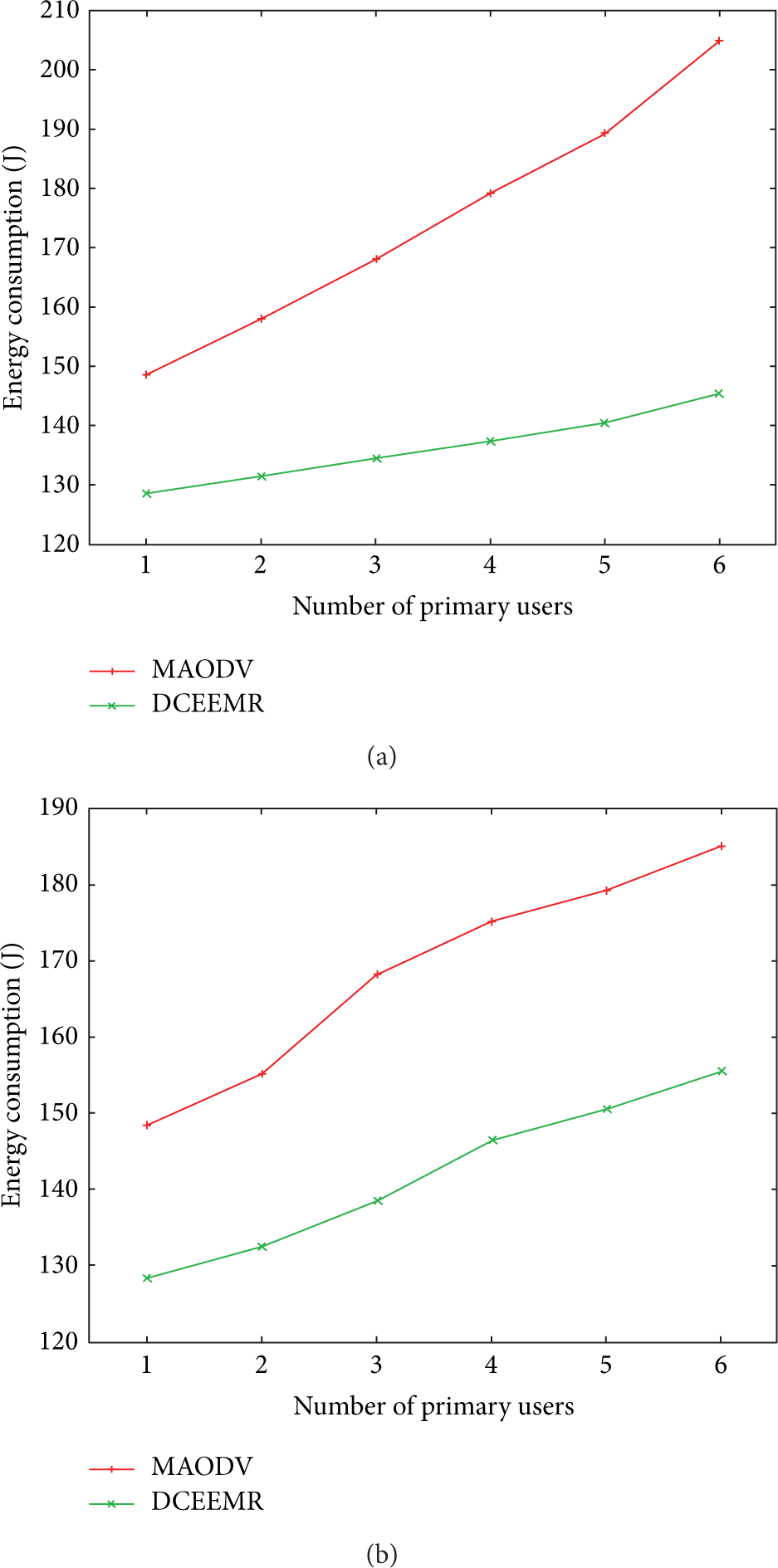
(a) The energy consumption for the case of 5 channels. (b) The energy consumption for the case of 10 channels.
We next observe the end-to-end delay and energy consumption of the multicast trees that are built using DCEEMR and MAODV when we fix the number of primary users and channels. Figures 7(a) and 7(b) show the end-to-end delay of multicast tree for the MAODV and DCEEMR in above simulation environment. It can be seen that the DCEEMR has the lower end-to-end delay than MAODV. This means that the speed of building multicast tree by our algorithm DCEEMR is faster than MAODV and satisfies the delay bound Δ.

(a) Delay of constructing multicast tree by MAODV. (b) Delay of constructing multicast tree by DCEEMR.
We next compare the energy consumption of the multicast tree built using above DCEEMR and MAODV. We track the energy consumption of DCEEMR and MAODV for 30, 35, 40, 45, and 50 nodes networks in Figure 8. From Figure 8, we can see that the energy consumption of DCEEMR is obviously smaller than MAODV whether over time and for different network size.

Energy consumption of multicast tree in MAODV and DCEFHA with network size.
Finally, we track the tree cost of DCEEMR and MAODV for different multicast group size. Figure 9 shows the tree cost of two algorithms for multicast group size from 10 to 20. It can be seen that the tree cost of DCEEMR is obviously smaller than the tree cost of MAODV, and increasing speed of tree cost is more and more slow in DCEEMR than in MAODV. From Figure 9, we can see the tree cost in MAODV is not mean in the rising process, because the MAODV cannot consider the energy cost of the multicast tree.

Energy consumption of multicast tree in MAODV and DCEFHA with multicast group size.
6. Conclusions
In this paper, we discuss the problem of construction minimum cost multicast tree satisfying delay bounded in cognitive radio ad hoc networks, which has been proved to be NP-hard. We proposed a novel delay-constrained energy efficient multicast routing heuristic algorithm (DCEEMR) to solve this NP-hard problem and the algorithm can be easily implemented in a distributed fashion because it only requires each node to have the information about its direct neighbors.
In the algorithm, we propose a delay-energy function which guarantees lower energy cost and lower residual end-to-end delay. The algorithm uses the delay-energy function to construct the multicast tree based on the spectrum selection. Through an example, we demonstrate that our algorithm is better in terms of energy consumption cost as compared to the existing algorithm QDMP. Experiment results by NS-2 show that the delay and energy cost are lower than well-known MAODV protocol.
Footnotes
Conflict of Interests
The authors declare that there is no conflict of interests regarding the publication of this paper.
Acknowledgments
This work is supported in part by the National Science Foundation of P. R. China under Grant (no. 61309033) and meanwhile is supported by the Education Department of Research Foundation for Key Program of Education Bureau of Henan Province (no. 13A510030 and no. 14A520024) and Zhengzhou Science and Technology bureau Research Project (no. 131PPTTGG423-2). This work is also supported by National Natural Science Foundation of China (no. U1304606), Science and Technology Development Project of Henan Province (no. 132102210555), National High Technology Research and Development Program of China (863 Program) (no. 2012AA101608), and Research Foundation for Key Program of Education Bureau of Henan Province (no. 14B413008). In addition, we hereby express gratitude to my dear partners Yingfeng Wang, Long Zhang, and Junling Yuan; without their effort, this thesis cannot be accomplished.